Redundant constraints
advertisement

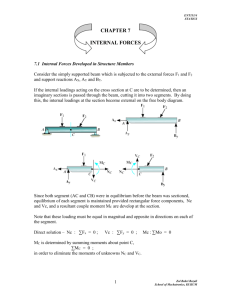
ENT151/4 STATICS CHAPTER 5 EQUILIBRIUM OF A RIGID BODY 5.1 Conditions of Rigid Body Diagram In this section, you will learn how to develop equations required for equilibrium of a rigid body. Referring to figure below, a rigid body is fixed in the x, y, z reference and is either at rest or moves with the reference at constant velocity. Figure (b) shows a free-body diagram of the arbitrary ith particle of the body. There are two types of forces which act on it. The resultant internal force, fi, is caused by the interactions with adjacent particles. The resultant external force, Fi, represent, for example, the effects of gravitational, electrical or magnetic. If the particle is in equilibrium; All these equations are added together vectorially; Fi + fi = 0 ; ∑Fi + ∑fi = 0 ; The summation of the internal forces will equal zero since the internal forces between particles within the body will occur in equal but opposite collinear pairs. Only the sum of the external forces will remain; ∑Fi = ∑F ; Then, the above equation can be written as ∑F = 0 ; 1 Zol Bahri Razali School of Mechatronics, KUKUM ENT151/4 STATICS Referring to figure below, the moments of the forces acting on the ith particle about the arbitrary point O. Using the above particle equilibrium equation and the distributive law of the vector cross product, ri x (Fi + fi ) = ri x Fi + ri x fi = 0 ; All these equations are added together vectorially; ∑ri x Fi + ∑ri x fi = 0 ; The second term is zero because the internal forces occur in equal but opposite collinear pairs; ∑Mo = ∑ ri x Fi ; The resultant moment of each pair of forces about point O is zero ; ∑Mo = 0 ; The two equations of equilibrium for a rigid body : ∑F = 0 ; ∑Mo = 0 ; (Eq. 1) 5.1 Free Body Diagram (FBD) in Two-Dimension A free-body diagram is a sketch of the outlined shape of the body, which represents it as being isolated or “free” from its surroundings. On this sketch it is necessary to show all the forces and couple moments that the surroundings exert on the body so that these effects can be accounted for when the equations of equilibrium are applied. Table 1 shows supports for rigid bodies subjected to two-dimensional force systems. 2 Zol Bahri Razali School of Mechatronics, KUKUM ENT151/4 STATICS 5.2 Support Reactions There are various types of reactions that occur at supports and points of support between bodies subjected to coplanar force systems. As a general rule, if a support prevents the translation of a body in a given direction, then a force is developed on the body in that direction. Likewise, if rotation is prevented, a couple moment is exerted on the body. There are three ways in which a horizontal member, such as a beam, is supported at its end. Figure shows one method consists of a roller or cylinder. Since this support only prevents the beam from translating in the vertical direction, the roller can only exert a force on the beam in this direction. The beam can be supported in a more restrictive manner by using a pin as shown in figure. The pin passes through a hole in the beam and two leaves which are fixed to the ground. Here the pin can prevent translation of the beam in any direction Φ and the pin must exert a force F on the beam in this direction. 3 Zol Bahri Razali School of Mechatronics, KUKUM ENT151/4 STATICS For purpose of analysis, it is generally easier to represent this resultant force F by its two components Fx and Fy. If Fx and Fy are known, then F and Φ can be calculated. The most restrictive way to support the beam would be to use a fixed support. This support will prevent both translation and rotation of the beam. Figure shows a force and couple moment which are developed on the beam at its point of connection to prevent both translation and rotation. The force is usually represented by its components Fx and Fy. Types of support reactions, and forces and couple moments involved : EXAMPLES Example 5-1 (pp 202) Example 5-2 (pp 203) Example 5-3 (pp 204) Example 5-4 (pp 205) Example 5-5 (pp 206) 4 Zol Bahri Razali School of Mechatronics, KUKUM ENT151/4 STATICS 5 Zol Bahri Razali School of Mechatronics, KUKUM ENT151/4 STATICS 5.3 Equations of Equilibrium ∑Fx = 0 ∑Fy = 0 ∑Mo = 0 When a body is subjected to a system of forces, which all lie in the x-y plane, then the forces can be resolved into their x and y components. The conditions for equilibrium for two dimensions are; ∑Fx = 0 ; ∑Fy = 0 ; ∑Mo = 0 ; (Eq. 2) ∑Fx and ∑Fy represent, respectively, the algebraic sums of the x and y components of all the forces acting on the body. ∑Mo represents the algebraic sums of the couple moments and the moments of all the force components about an axis perpendicular to the x-y plane and passing through the arbitrary point O, which may lie either on or off the body. Procedure for Analysis : Coplanar force equilibrium problems for a rigid body can be solved using the following procedure: 6 Zol Bahri Razali School of Mechatronics, KUKUM ENT151/4 STATICS Free-Body Diagram 1) Establish the x, y coordinate axes in any suitable orientation. 2) Draw an outlined shape of the body. 3) Show all the forces and couple moments acting on the body. 4) Label all the loading and specify their directions relative to the x, y axes. The sense of a force or couple moment having an unknown magnitude but known line of action can be assumed. 5) Indicate the dimensions of the body necessary for computing the moments of forces. Equation of Equilibrium 6) Apply the moment equation of equilibrium, ∑Mo = 0, about a point (O) that lies at the intersection of the lines of action of two unknown forces. In this way, the moments of these unknowns are zero about O and a direct solution for the third unknown can be determined. 7) When applying the force equilibrium equations, ∑Fx = 0 and ∑Fy = 0, orient the x and y axes along lines that will provide the simplest resolution of the forces into their x and y components. 8) If the solution of the equilibrium equations yields a negative scalar for a force or couple moment magnitude, this indicates that the sense is opposite to that which was assumed on the free-body diagram EXAMPLES Example 5-6 (pp 211) Example 5-7 (pp 212) Example 5-8 (pp 213) Example 5-9 (pp 214) Example 5-10 (pp 215) Example 5-11 (pp 216) Example 5-12 (pp 217) 7 Zol Bahri Razali School of Mechatronics, KUKUM ENT151/4 STATICS 5.4 Two and three-force members Two force members : Three-force members EXAMPLE : Example 5-13 (pp 220) 8 Zol Bahri Razali School of Mechatronics, KUKUM ENT151/4 STATICS 5.5 Equilibrium in Three Dimensions The general procedure for establishing the free-body diagram of a rigid body for three dimensions is stated as in the case of two dimensions. Essentially it required first “isolating” the body by drawing its outlined shape. This is followed by a careful labeling of all the forces and couple moments in reference to an established x, y, z coordinate system. As a general rule, components of reaction having an unknown magnitude are shown acting on the free-body diagram in the positive sense. In this way, if any negative values are obtained, they will indicate that the components act in negative coordinate directions. Support reactions : Table 5-2 shows supports for rigid bodies subjected to three-dimensional force systems. It is important to recognize the symbols used to represent each of these supports and to understand clearly how the forces and couple moments are developed by each support. A force is developed by a support that restricts the translation of the attached members whereas a couple moment is develop when rotation of the attached member is prevented. For example, the ball-and-socket joint prevents any translation of the connecting member (refer to Table 5-2). Therefore, a force must act on the member at the point of connection. These force has three components having unknown magnitude, Fx, Fy, Fz. Provided these components are known, one can obtained the magnitude of force and the force’s orientation defined by the coordinate direction angles α, β, γ. Magnitude of force : F = √ (Fx2 + Fy2 + Fz2) The third direction angle : Cos2 α + Cos2 β + Cos2 γ = 1 9 Zol Bahri Razali School of Mechatronics, KUKUM ENT151/4 STATICS 10 Zol Bahri Razali School of Mechatronics, KUKUM ENT151/4 STATICS EXAMPLES Example 5-14 (pp 211) 5.6 Example 5-15 (pp 212) Equation of Equilibrium The conditions for equilibrium of a rigid body subjected to a three-dimensional force system require that both the resultant force and resultant couple moment acting on the body be equal to zero. Vector equations of equilibrium Two conditions for equilibrium of a rigid body; ∑F = 0 ; ∑Mo = 0 11 (Eq. 1) Zol Bahri Razali School of Mechatronics, KUKUM ENT151/4 STATICS where ∑F is the vector sum of all the external forces acting on the body and ∑Mo is the sum of the couple moments and the moments of all the forces about any point O located either on or off the body. Scalar equations of equilibrium If all the applied external forces and couple moments are expressed in Cartesian vector form and substituted into Eq. 1; ∑F = ∑Fx i + ∑Fy j + ∑Fz k =0 ∑Mo = ∑Mx i + ∑My j + ∑Mz k =0 Where ; ∑Fx = 0 ; ∑Fy = 0 ; ∑Fz = 0 (Eq. 2a) ∑Mx = 0 ; ∑My = 0 ; ∑Mz = 0 (Eq. 2b) These six scalar equilibrium equations (Eq. 2a and Eq. 2b) may be used to solve for at most six unknowns shown on the free-body diagram. Note : If a support prevents translation of a body in a specific direction, then the support exerts a force on the body in that direction. If rotation about an axis is prevented, then the support exerts a couple moment on the body about the axis. Procedure for Analysis Three-dimensional equilibrium problems for a rigid body can be solved using the following procedure: Free-Body Diagram 1) Draw an outlined shape of the body. 2) Show all the forces and couple moments acting on the body. 3) Establish the origin of the x, y, z axes at a convenient point and orient the axes so that they are parallel to as many of the external forces and moments as possible. 4) Label all the loadings and specify their directions relative to the x, y, z axes. 5) Indicate the dimensions of the body necessary for computing the moment of forces. Equation of Equilibrium 6) If the x, y, z force and moment components seem easy to determine, then apply six scalar equations of equilibrium; otherwise use the vector equations. 7) It is not necessary that the set of axes chosen for force summation coincide with the set of axes chosen for moment summation. 12 Zol Bahri Razali School of Mechatronics, KUKUM ENT151/4 STATICS 8) Choose the direction of an axis for moment summation such that it intersects the lines of action of as many unknown forces is possible. The moment of forces passing through points on this axis and forces which are parallel to the axis will then be zero. 5.7 Constraints for a Rigid Body Redundant constraints When the body has a redundant support more supports then are necessary to hold it in equilibrium, it becomes statically indeterminate. Statically indeterminate – there will be more unknown loadings on the body then equations of equilibrium available for their solution. Eg : Two dimensional case – five unknown but only three equation. Three dimensional case – eight unknown but only five equation Improper Constraints Instability of the body because of improper constraining by the supports. 3-Dimensional – if the support reaction all intersec a common axis 2-Dimensional – the axis is perpendicular to the plane of the forces When all the reactive forces are concurrent at the point, the body is improperly constraint. Improper constraining leads to instability occurs when the reactive forces are all parallel. 13 Zol Bahri Razali School of Mechatronics, KUKUM ENT151/4 STATICS Proper constraining requires 1. the line of action of the reactive forces does not intersect point on a common axis 2. the reactive force must not all be parallel on one another EXAMPLES Example 5-15 (pp 242) Example 5-16 (pp 243) Example 5-17 (pp 244) Example 5-18 (pp 245) Example 5-19 (pp 246) EXERCISES Exercise 5 - 5 Exercise 5 - 19 Exercise 5 - 22 Exercise 5 - 24 Exercise 5 - 89 Exercise 5 - 95 14 Zol Bahri Razali School of Mechatronics, KUKUM