- the Journal of Information, Knowledge and Research in
advertisement

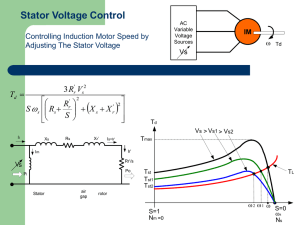
JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRICAL ENGINEERING V/F METHOD FOR INDUCTION MOTOR DRIVE SPEED CONTROL USING MATLAB SIMULATION 1 MR. H. M. KARKAR, 2 DR. S. N. PANDYA 1M.E. [Power System] Student, Department Of Electrical Engineering, L.D. College Of Engineering, Ahmedabad 2Associate Professor, Department Of Electrical Engineering, L.D. College Of Engineering, Ahmedabad hmkarkar@gmail.com, saunipandya@gmail.com ABSTRACT: To analyze the steady state equivalent circuit model of an induction motor to establish the equation that justify the use of a constant V/f speed control of open loop. The main objective is to maintain the speed at fixed reference. To investigate the control schemes for controlling induction machine, particularly the scalar control method and to evaluate their performance under variable input-output conditions. The merits and limits are reviewed based on a survey of the related paper Keywords— Frequency, Induction motor, Parameter variation, Speed control, Scalar control method, Voltage. I: INTRODUCTION It is very important to control the speed of induction motors in industrial and engineering applications. Most of the drives for industrial processes and domestic appliance have been designed to operate at essentially constant speed, mainly because of the ready availability of economical induction motor operating on the available constant frequency ac power supply. In mechanical system, it is well known that a variable speed drive provides improved performance and energy efficiency. However, until recently, the provision of a continuously variable speed has been considered too expensive for all but special applications for which the compromise of constant speed was not acceptable e.g. elevators, mill drives, machine tools. Speed control techniques of induction motors can be broadly classified into two types scalar control and vector control. Scalar control involves controlling the magnitude of voltage or frequency of the induction motor The V/f control method is, in principle a control method for keeping the air-gap flux constant by controlling stator voltage V and f so that the ratio V/f is kept constant. In industrial applications where wide range and smooth speed control has to be provided such case D.C. drives are preferred in many cases For these reasons preference is often given to adjustable speed induction motor drives as the induction motor is cheaper, easy in construction and more economical to operate. But the plain induction motor is essentially a constant speed machine, as its stable operation is restricted within a small range of speed. II: SPEED CONTROL OF INDUCTION MOTOR AND EQUIVALENT CIRCUIT Having known the Torque-speed characteristic of the motor, its speed can be controlled in following ways: a) Changing the number of poles b) Variation of Motor Resistance c) Variable-Voltage, Constant-Frequency Operation d) Variable-Frequency Operation e) Constant Volts/Hertz Operation To maintain torque capability of the motor close to the rated torque at any frequency, the air gap flux, φ ag is maintained constant. Any reduction in the supply frequency without changing the supple voltage will increase the air gap flux and the motor may go to saturation. This will increase the magnetizing current, distored the line current and voltage, increase the core loss and copper loss, and it makes the system noisy. The air gap voltage is related to φag and the frequency f as, Input voltage, or, where is a constant. Fig.1 Equivalent circuit of the induction motor To study the behavior of the induction motor at various operating conditions, it is convenient to an equivalent circuit of the motor under sinusoidal steady state operating conditions. ISSN: 0975 – 6736| NOV 12 TO OCT 13 | VOLUME – 02, ISSUE - 02 Page 192 JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRICAL ENGINEERING For a balanced 3 phase system, equivalent circuit for any one phase will suffice. From the per-phase equivalent circuit of the induction motor, the current drawn by the circuit is, Maximum torque, = The air-gap power is given as, 2 Mechanical output power is given as Hence, the mechanical torque is given as, (I) Plotting the torque against slip or speed gives us the torque-speed characteristic of the motor. For positive values of slip, the torque-speed curve has a peak. This is the maximum torque produced by the motor and is called the breakdown torque or the stalling torque. From equation (i) we observe that the torque is proportional to the square of applied voltage. Figure 2 shows the variation of torque-speed curves with changing applied voltage. III: CONSTANT VOLT/HERTZ OPERATION If the air gap flux of the machine is kept constant (like a dc shunt motor) in the constant torque region. The torque sensitivity per ampere of stator current is high, permitting fast transient response of the drive with stator current control. In variable frequency, variable- voltage operation of a drive system, the machine usually has low slip characteristics (i.e., low rotor resistance), giving high efficiency. In spite of the low inherent starting torque for base frequency operation, the machine can always be started at maximum torque. The absence of a high in-rush starting current in a direct-start drive reduces stress and therefore improves the effective life of the machine. = At higher frequency neglecting , and therefore, = = Fig.2 Torque-speed curve for variable voltage Its value can be calculated by differentiating the torque expression with respect to slip and then setting it to zero to get ŝ, the slip at the maximum torque. Hence, the maximum torques will remain constant if the speed is controlled by supply frequency variation with the ratio Vs/f kept constant But at small frequency, the equivalent leakage reactance , becomes comparable to or even less than the stator resistance rs which causes the maximum torque to decrease. Hence, to keep the maximum torque unchanged and, thereby, maintaining the motor overload torque capacity sufficiently high at low frequencies, it is desirable the voltage less than the frequency in that range. ISSN: 0975 – 6736| NOV 12 TO OCT 13 | VOLUME – 02, ISSUE - 02 Page 193 JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRICAL ENGINEERING IV: SCALAR CONTROL Slip at maximum torque, Maximum torque, Above equation shows that the maximum torque is independent of frequency and hence remains the same for each E/f and the maximum torque occurs at a speed lower than the synchronous speed for each combination of E and f. However, we get a slightly different set of curves for constant V/f, so for fixed V, E changes with operating slip and the maximum torque is reduced, as shown in figure 4. Only magnitudes of the input variable-frequency and voltage are controlled, this is known as “Scalar Control”. In such controls, very little knowledge of the motor is required for frequency control. Hence, a control of this type offers low cost and is an easy to implement solution. Thus, this control is widely used. A disadvantage of such a control is that the torque developed is load dependent as it is not controlled directly. Also, the transient response of such a control is not fast due to the predefined switching pattern of the inverter. Scalar control, as the name indicates, is due to magnitude variation of the control variable only, and disregards the coupling effect in the machine. The voltage of a machine can be controlled to control the flux, and frequency or slip can be controlled to torque. However flux and torque are also functions of frequency and voltage respectively. The most popularly used scalar control methodology is Volts/Hertz method of Open Loop Constant V/f speed control. OPEN LOOP V/F CONTROL The open loop V/f control of an induction motor is far the most popular method of speed control because of its simplicity. This types of method are widely used in industry. Traditionally induction motor have been used with open loop 60Hz power suppply. For variable speed application, both voltage and frequency are changed proportionately so that the air gap flux remains constant. If ψm is Fig.3 Torque-speed curve for variable voltage Fig 4 Torque-speed curves for constant V/f allowed to vary, it may either cause saturation or vary the torque sensitively and in this control no feedback signals are needed. Figure 5 shows the block diagram of block diagram of Open Loop Constant V/f speed control. Fig 5 Block diagram of Open Loop Constant V/f speed control ISSN: 0975 – 6736| NOV 12 TO OCT 13 | VOLUME – 02, ISSUE - 02 Page 194 JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRICAL ENGINEERING The frequency ωe* is the primary control variable which considered as constant one. The phase voltage Vs* command is directly generated from the frequency command. Variable frequency speed control of the drive with the fully open loop reduced power consumption. As the frequency becomes small at low speed, the stator resistance tends to observe major amount of stator voltage thus weakening flux. The ωe* signal is integrated to generate the angle θe*, and the corresponding sinusoidal phase voltage (va*, vb* and vc* singal) are generated by expression as shown in figure 5. Fig 7 Simulation of open loop v/f speed control using six step VSI (Voltage Source Inverter) Fig 6 Torque -speed curve showing effect of frequency variation. Supply voltage and load torque changes The drive’s steady-state performance on a torquespeed plane with a fan or pump-type load is shown in figure 6. The points 1, 2, 3, etc. indicated that as the frequency is gradually increased, the speed is also increases almost proportionally. The speed drop from ωr to ωr' if initial operating point is 3 and load torque is increased for same frequency. Now the operation is at point a in another torque-speed curve. If ac line voltage reduces, that lowers the machine termianl voltage. Coresponding to point b the speed will also drop. The six-step generator illustrated in the figure 8 contains six comparators to produce the six-step switching waveforms. Some supplementary logic enables a speed reversal by inverting two phases. Speed set point is used only to determine the motor voltage and frequency applied by the six step inverter in order to maintain the (V/F) ratio (or the motor flux) constant from 0 to the nominal speed. Above nominal speed, the motor operates in the flux weakening mode; that is, the voltage is maintained constant at its nominal value while the frequency is increased proportionally to the speed set point. When reversing speed, a short delay is required at the zero speed crossing so that air gap flux decays to zero. V: SIMULATION OF OPEN LOOP CONSTANT V/F SPEED The simulation is carried out for 3hp, 220 V squirrel cage induction motor drive using six step voltage source inverter (VSI) is shown in figure 7. Simulation of open loop v/f speed control is built from seven main blocks. The induction motor, three-phase inverter, three-phase thyristor rectifier, bridge firing unit, DC bus voltage regulator, sixstep generator and DC bus voltage filter are provided. Fig 8 Control circuit of six step VSI (Voltage Source Inverter) This topic confirms that this presented method is possible to be implemented. The simulations were carried out at different frequency using Matlab/Simulink as shown in following Figure. ISSN: 0975 – 6736| NOV 12 TO OCT 13 | VOLUME – 02, ISSUE - 02 Page 195 JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRICAL ENGINEERING Fig 9 Waveform of stator current, rotor speed, electromagnetic torque at 60Hz frequency Fig 11 Waveform of stator current, rotor speed, electromagnetic torque at 40Hz frequency The open loop constant V/f is simulated for 4.5s. In figure 9, the speed set point doesn't go instantaneously to 1800 rpm but follows the acceleration ramp (2000 rpm/s). The motor reaches steady state at t = 1.3 s. At t = 1.5 s, the torque is applied to the motor's shaft step from 0 to 5 N-m. You can observe a speed slightly. At t = 2.5 s, the torque applied to the motor's shaft steps from 5 N.m to 10 N.m. Again speed decrease slightly. At t = 3.5 s, the torque applied to the motor's shaft steps from 10 N.m to 15 N.m then some speed drop at this point. At t = 4 s, the load torque is removed completely. Figure:-12. Waveform of stator current, rotor speed, electromagnetic torque at 30Hz frequency From above waveform of torque and speed we find out that when we decrease the frequency the speed is decrease. But stator current same at all frequency so torque is also remaining same by maintaining constant v/f ratio. Fig 10 Waveform of stator current, rotor speed, electromagnetic torque at 50Hz frequency ISSN: 0975 – 6736| NOV 12 TO OCT 13 | VOLUME – 02, ISSUE - 02 Page 196 JOURNAL OF INFORMATION, KNOWLEDGE AND RESEARCH IN ELECTRICAL ENGINEERING VI: CONCLUSION In this work simulink model of induction machine drives has been implemented. Unlike most other induction machine model implements, with this model the user has access to all the internal variables for getting an insight into the machine operation. The project simulation is done in “MATLAB” software. The paper describes the design of the control stage and presents the result obtained the motor. This type of control is well justified in applications requiring a constant V/f speed control such as pumps, machine tools, mills etc. An analysis of the steady state equivalent circuit was done in order to establish the equations that justify the use of the scalar control method. The open loop speed controls of motor drive simulation results are presented. Experimental and simulated results were used to demonstrate the feasibility of the proposed solution. APPENDIX Parameter Motor Rating Voltage Stator Resistance (Rs) Stator Inductance (Ls) Rotor Resistance (Rs) Rotor Inductance (Ls) Mutual Inductance (Lm) Frequency (f) No. of pole (P) Inertia (J) Friction factor (F) Value 2.238 KVA 220 V 0.435 ohm 0.002 H 0.816 ohm 0.002 H 69.31x10-3 H 60 Hz 4 0.089 Kg-m2 0.005 N.m.s. [6] Rongfeng Yang, Wei Chen, Yong Yu and Dianguo Xu, “A novel V/f control system based on stator voltage oriented method”, International Conference Electrical Machines and Systems, ICEMS 2008. International Conference on 17-20 Oct. 2008 Page(s): 83-87. [7] Mineo Tsuji, Xiaodan Zhao, He Zhang, Shin-ichi Hamasaki and Shuo Chen,“ Steady-state and transient characteristics of a novel V/f controlled induction motor”, International Conference Electrical Machines and Systems, ICEMS 2009. International Conference on 15-18 Nov. 2009. [8] T. Tsuji, S. Chen, and S. Hamasaki,“A novel V/f control of induction motors for wide and precise speed operation”, Proc. SPEEDAM2008, pp. 1130-1135, June 2008 [9] Wei Chen, Dianguo Xu, Rongfeng Yang, Yong Yu, Zhuang Xu, “A novel stator voltage oriented v/f control method capable of high output torque at low speed”, Proc. PEDS2009, pp. 228-233 (2009). [10] Janne Salomäki and Mikko Porma, “Fieldweakening method for v/f controlled hoist drive”, IEEE International Electric Machines & Drives Conference (IEMDC), pp 1253-1258 (2011). . [11] Chen Wei; Yang Rong Feng; Yu Yong; Wang Gao Lin; Xu Dian Guo; “A novel stability improvement method for V/F controlled induction motor drive systems”. Electrical Machines and Systems, 2008. ICEMS 2008. International Conference 17-20 Oct. 2008, Page(s): 1073-1076. REFRENCES [1] B.K. Bose, “Modern Power Electronics and AC Drives”, Prentice Hall, 2002. [2] G.R. Slemon, “ Electrical machines for variable frequency drives”, IEEE Procceding, vol.82, no. 8, pp. 1123-1138, August 1994. [3] G.McPherson and R. D. Laramore, “An introduction to electrical machine and transformers, New York, John Wiley and sons, 1990, pp. 239-302. [4] K. L. Shi, T. F. Chan, Y. K. Wong and S. L. Ho, “Modelling and simulation of the three-phase induction motor simulink’, Int. J. Elect. Enging Educ., Manchester U.P., Vol.36, pp.163-172 (1999). [5] Ku.Trupti Deoram Tembhekar, “Improvement and analysis of speed control of three phase induction motor drive including two methods”, Proc. ICETTET, pp.736-741 (2009). ISSN: 0975 – 6736| NOV 12 TO OCT 13 | VOLUME – 02, ISSUE - 02 Page 197