JANE_1670_sm_DuchesneFortinCourbin
advertisement

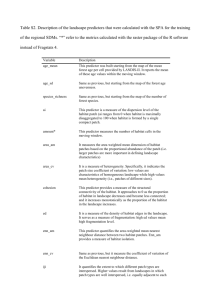
1 1 Appendix S1. Detailed description of the four simulation scenarios used to assess the 2 effect of heterogeneous habitat selection among animals. 3 4 We use computer simulations to investigate the effect of departures from the 5 assumption of homogeneous habitat selection among individuals. Deviations from the 6 assumption were induced by imposing inter-individual variations in movement rules and 7 by forcing movement decisions that violated the IIA assumption. Individual-based, 8 spatially explicit modelling was conducted using the Spatially Explicit Landscape Event 9 Simulator (Fall & Fall 2001). We simulated the movements of 200 virtual foragers, with 10 each individual starting (time zero) at a random location within the landscape (1000 11 1000 cells), and followed for 50 consecutive moves. Landscapes were comprised of four 12 types of randomly distributed habitat patches: Patch type H1 offered the most food, 13 followed by H2. Neither H3 nor H4 offered any food. H1 was risky, unless located <15 14 cells from H3, in which case H1 became safe. H2 was always safe. 15 We tested four scenarios differing in the movement rules of individuals, with distinct 16 statistical implications. Movements for scenarios 1 and 2 were both consistent with the 17 IIA hypothesis; scenario 1 assumed a homogeneous movement rule, whereas scenario 2 18 involved inter-individual variation in the rules. Scenarios 3 and 4 both led to violation of 19 the IIA hypothesis at the individual level; a homogeneous movement rule was used for 20 scenario 3 whereas inter-individual variation in movement rules characterized scenario 4. 21 In scenario 1, the landscape was comprised of 15% H1, 15% H2, 0% H3, and 70% 22 H4. Movement decisions depended on the current location. When the forager was in H4, 23 its next move had a 1/6 probability of ending up in H1 and a 5/6 probability of finishing 2 1 in H2. When the forager was in H1 or H2, the direction of its next move was drawn from 2 a uniform distribution (0, 359°) and the distance was drawn from a normal distribution 3 with mean 10 and variance 3 (i.e., N[10, 3]). With this simulation algorithm, the types of 4 habitat visited at each time step form a Markov chain. A simple calculation (Appendix 5 S2) shows that in the long run, each individual spends 15.7%, 43.1%, and 41.2% of its 6 steps in H1, H2 and H4, respectively. Based on these probabilities, we derive an 7 approximate lower bound of -1.01 for the true value of the regression coefficient for 8 habitat H1 in a RSF with H2 as baseline patch type (Appendix S2). 9 The same general movement rules were also applied to scenario 2, with the exception 10 that the relative selection of H1 and H2 varied among individuals: When a forager was in 11 H4 then its next move had a (1/6)-b chance of ending up in H1 and a (5/6)+b probability 12 of finishing in H2, where b was fixed for a given individual throughout its path but varied 13 among individuals according to N(0, 0.2). When the simulated probabilities for (1/6)-b or 14 (5/6)+b were <0 or >1, they were truncated to 0 or 1, respectively. Nevertheless, 15 individuals were much more likely to end up in H2 than H1. 16 In scenarios 3 and 4, patches of refuge habitat H3 were added to the landscape which 17 was then comprised of 15% H1, 15% H2, 0.04% H3, and 69.96% H4. According to 18 scenario 3, when the forager was in H3 or H4, it had a 5/6 chance of moving to H1 if the 19 nearest H1 patch was <15 cells of a H3 patch, and 1/6 of ending up in H2. In contrast, 20 when the animal was in H3 or H4 but the nearest patch H1 was ≥15 cells from H3, then 21 its next move had a 1/6 chance of finishing in H1 and a 5/6 chance in H2. When the 22 animal was in H1 ≥15 cells from H3 or in H2, the direction of its next move was drawn 23 from a uniform distribution (0-359o) and the distance from N(10, 3). When individuals 3 1 occupied a patch H1 located <15 cells from H3, then the animal had a 4/5 chance of 2 remaining in the current patch at the end of its next step, and 1/5 of moving according to 3 a uniform direction (0-359o) with a distance N(25, 1). These general movement rules for 4 scenario 3 were also used for scenario 4, with the exception that the latter scenario 5 displayed inter-individual variations in the selection probabilities for H1 and H2. More 6 specifically, when an animal was in H3 or H4, then the forager had a (5/6)+b chance of 7 making a move ending in H1 if that patch was <15 cells of a refuge H3, and a (1/6)-b 8 chance of finishing in H2, where b was fixed for a given individual but varied among 9 individuals according to N(0, 0.2). To assess the effect of varying patch availability on 10 inferences, scenario 3 was applied to 5 additional landscapes, where the proportions of 11 H1 and H2 remained unchanged but those of H3 and H4 varied according to Landscape 12 1: 0.01%, 69.99%, Landscape 2: 0.02%, 69.98%, Landscape 3: 0.03%, 69.97%, 13 Landscape 4: 0.05%, 69.95%, and Landscape 5: 0.06%, 69.94%, respectively. 14 In all scenarios, each observed location was matched to 10 locations randomly drawn 15 within a 30-cell radius. Patch type (H1-H4) was identified at all observed and random 16 locations. Fixed and mixed-effects conditional logistic regressions were used to build 17 RSFs. Mixed-effects RSFs allowed the coefficient of H1 to vary among individuals 18 according to a N(β1,σ2). In all models, H2 was used as the baseline patch type. 19 20 Reference 21 Fall, A. & Fall, J. (2001) A domain-specific language for models of landscape dynamics. 22 Ecological Modelling, 141, 1-18.