A Composability Lexicon - University of Virginia
advertisement

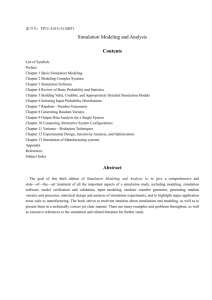
A Composability Lexicon Mikel D. Petty and Eric W. Weisel Virginia Modeling, Analysis and Simulation Center Old Dominion University Norfolk VA 23529 mpetty@vmasc.odu.edu 757-686-6210, eweisel@odu.edu 757-686-6227 Keywords: Composability, Interoperability ABSTRACT: Composability is the capability to select and assemble simulation components in various combinations into simulation systems to satisfy specific user requirements. The defining characteristic of composability is the ability to combine and recombine components into different simulation systems for different purposes. Composability would have many benefits for the practice of simulation. However, the precise meaning of the term “composability” and related terminology in the research literature is surprisingly varied. Composability has multiple related meanings or levels that differ primarily by the question of what is being composed. Nine distinct levels of composability are identified, defined, and compared. Two views on composability, concerned with the syntactic and semantic aspects of composability respectively, are contrasted. Interoperability and configurability are related to composability, but they are different ideas, as interoperability is necessary but not sufficient to produce composability at the federate level. 1. Introduction Composability is an increasingly important issue in simulation system development. Different meanings of the term appear in the simulation research literature; they are generally similar in concept but often differ in emphasis or level. The fact that composability means different things in different contexts has been noted previously [1]. The goal of this paper is to clarify the lexicon of composability by giving a single common definition for the term, listing and defining different levels of composability, and differentiating composability from related ideas, such as interoperability. 2. Definition of Composability These example definitions of composability from the literature illustrate the variations that can be found: The ability to rapidly configure, initialize, and test an exercise by logically assembling a simulation from a pool of reusable components [2]. The ability to create, configure, initialize, test, and validate an exercise by logically assembling a unique simulation execution from a pool of reusable system components in order to meet a specific set of objectives [3]. The ability to build new things from existing pieces [4]. The ability to compose models/modules across a variety of application domains, levels of resolution and time scales [5]. The following common definition of composability is proposed. Composability is the capability to select and assemble simulation components in various combinations into valid simulation systems to satisfy specific user requirements. The components to be composed may be drawn from a library or repository of components, as suggested in Figure 1. That library might include multiple network interfaces, different user interfaces, a range of classes of implemented entity models, a variety of implemented physical models at different levels of fidelity, and so on. Different sets of components from the repository may be composed into different simulation systems. The components may be reused in multiple simulation systems. The defining characteristic of composability is that different simulation systems can be composed at configuration time in a variety of ways, each suited to some distinct purpose, and the different possible compositions will be usefully valid simulation systems.1 Composability is more than just the ability to put simulations together from parts; it is the ability to combine and recombine, to configure and reconfigure, sets of parts from those available into different simulation systems to meet different needs. If the compositions aren’t valid, then by definition they aren’t composable. 1 Component Repository Simulation A 11 33 22 33 52 52 Simulation B 11 88 33 22 22 ... N N N N Figure 1. Notional example of composability. 3. When uses of the term “composability” in the literature are compared it is apparent there is one way in which the meanings often differ. Indeed, that difference is hinted at in the quotations given earlier. The uses differ on the question of what is being composed and what is formed by the composition. A number of different answers can be found in the literature; they will be referred to as levels of composability. Nine levels of composability are defined here.2 These levels have been drawn from various sources, some of which explicitly or implicitly include several of the levels defined here in composability (e.g., [6]). Composability levels from different sources that were essentially the same have been combined. Those listed here have different meanings and implications, but there may be some overlap in component and scale between them. 1. 2 and auxilliary software components are composed into simulation events, exercises or experiments [7]. For this to be a level of composability, rather than simply integration, the composition must be done in way that allows combining and recombining the applications into different systems and events (more on the distinction between composition and integration later). This level of composability has also been called “event-level” [7]. Levels of Composability Application. Applications such as simulations, real C4I systems, networks, communications equipment, In this list the levels are named after the unit of composition, i.e., the components being composed. Another method of naming the levels is after the result of composition, i.e., what is produced from the components. Other sources have taken both the former approach [1] [2] and the latter approach [7]. 2. Federate. Federates are composed into persistent federations.3 A federation is persistent if is reused for a number of different purposes (such as events, exercises, or experiments), though possibly with some changes to the set of federates that have been composed. The composition may be supported by an interoperability protocol, such as HLA, ALSP, or DIS.4 Examples of this level of composability include the Joint Training Confederation and the The terms “federate” and “federation” have specific HLA meanings; here they are being used with more generic meanings analogous to their HLA meanings to denote simulations linked together, but not necessarily with HLA. 3 4 DIS is Distributed Interactive Simulation, ALSP is Aggregrate Level Simulation Protocol, and HLA is High Level Architecture. Combat Trauma Patient Simulation [8]. This level of composability has also been called “federation-level” [7]. 3. Package. Pre-assembled packages comprising sets of models that form a consistent subset of the battlespace are composed into simulations [1] [2]. 4. Parameter. Parameters are used to configure preexisting simulations [1] [2]. The sources also include in this level of composability, which they call the “simulation” level, the idea that a limited pool of packages may be composed into simulations. In the lexicon of this paper that second level is included in package level. 5. 6. Module. Software modules5 are composed into software executables. The executables may be federates in a federation or standalone simulation systems. The OneSAF family of software products is expected to have this level of composability [9] [10] [11]. Model. Separate models of smaller-scale processes or objects6 are composed into composite models of larger-scale processes or objects. For example, models of platform/entity sub-systems, such as sensors and weapons, may be composed into composite models of platforms/entities, such as aircraft [7]. Models of physical processes, such as wind and rainfall, may be composed into composite models of larger-scale physical phenomena, such as weather. The composite models may be implemented as modules or federates. This level of composability is a design goal of both ModSAF [12] and OneSAF [13]. This level of composability has also been called “object-level” [7], “component” [2], and “reconfigurable models” [14]. The term “software component” is also used with this meaning, and if used here, would make this the “component” level of composability. However, in this paper the term “component” is used in a general sense as the units of composition at any level. 5 Here “object” means simulated real-world object, not software object. The former is not always implemented as the latter and assuming so is an oversimplification. Even if a real-world object class, such as an aircraft type, is implemented as a software object class, it is not correct to assume that the sub-components of that real-world object class, such as sensors and weapons, are implemented as sub-classes of the software object class. That is a mixing of is-a and part-of relationships. 6 7. Data. Sets of data are composed into databases. The data sets may be initially distinct because they describe different entities, they are from different sources, or they represent different aspects of some phenomena. Different data sets were composed to represent electronic warfare in DIS [15]. SEDRIS is intended to support such composability for natural environment databases. 8. Entity. Platforms/entities are composed into groupings such as military units, force structures, and scenario orders of battle [7]. This level of composition may be hierarchical, with several layers of groupings composed into higher level groupings. This level of composition is typically done with data, rather than with software, as in ModSAF and WARSIM. This level of composition has also been called “federate-level” [7]. 9. Behavior. Low-level atomic behaviors are composed into high-level composite behaviors, which are to be executed by autonomous simulation entities in a computer generated forces system or constructive simulation. The behaviors may be expressed in a variety of forms. Examples include hierarchically organized finite state machines as used in ModSAF and its variants [16] and process flow diagrams [17]. Table 1 summarizes these composability levels. 4. Composability as a Simulation System Requirement Composability has become established as an official requirement for new simulation system development. The best example of this is OneSAF; composability is mentioned numerous times in the OneSAF Operational Requirements Document [9]. It appears twice in the shortcomings list, as the Composability item “Current SAFs are not composable for specific applications.” and as the main point of the Fidelity in physical models item “…ability to compose an exercise or study with increased or decreased resolution without modification to the code.” The ORD says that OneSAF will “… provide a framework and supporting technology that permits OneSAF components to be selected, configured, and integrated into a common simulation environment capable of being tailored to meet requirements of every M&S domain.” Interestingly, the first and last of these requirements seem to be at the module level, while the second seems to be at the model level. Components Composition Example(s) Application Event Unified Endeavor Federate Federation Package Simulation Joint Training Confederation Combat Trauma Patient Simulation JSIMS Parameter Simulation JSIMS Module Executable OneSAF Model Composite model Data Database Entitie Military unit Behavior Composite behavior ModSAF OneSAF Electronic warfare in DIS SEDRIS ModSAF WARSIM Finite state machines Process flow diagrams Table 1. Levels of composability. 5. Types of Composability Composability can be understood from both engineering and modeling perspectives. The common definition given earlier emphasizes engineering composability. Engineering and modeling composability have also been called syntactic and semantic composability, respectively [4] [18].7 Engineering composability, i.e., the actual implementation of composability, requires that the composable components be constructed so that their implementation details, such as parameter passing mechanisms, external data accesses, and timing assumptions are compatible for all of the different configurations that might be composed. The question in engineering (syntactic) composability is whether the components can be connected. In contrast, modeling (semantic) composability is a question of whether the models that make up the composed simulation system can be meaningfully composed, i.e., if their combined computation is semantically valid. The term model is commonly defined as a mathematical or logical representation of some system or object. Models are often implemented as computer code and executed over time; that execution is simulation. Models use equations and algorithms that 7 In this paper we will use the terms engineering/syntactic and modeling/semantic interchangably, as best suits the context. In a companion paper we generally use syntactic and semantic composability [27]. mimic the pertinent aspects of the system or object. Nontrivial simulations may have many models, organized hierarchically (models invoking sub-models) and collaboratively (models exchanging data with co-models) in intricate ways. When composing models, it is necessary to determine if the inputs each model will receive, which are often outputs of the models it is composed with, will be within its domain of validity. For example, suppose a composite model of an aircraft is composed from two valid component models, one of the aircraft’s jet engine and one of its flight dynamics. Even if both component models are valid, the composition will not be valid if the engine model produces supersonic velocities for the aircraft and the flight dynamics model is only valid for subsonic velocities. Similarly, it is also necessary to determine if the assumptions made in each model of a composition are consistent. A model of aircraft detection composed of components that in some cases assume infra-red signature is independent of aspect angle and in others consider aspect angle when calculating infra-red signature will probably not be valid. 6. Related Ideas: Interoperability, Integration, and Configurability Certain other ideas are closely related to composability; two, interoperability and configurability, are defined and distinguished from composability. For simulations, interoperability is the ability of different simulations, connected in a distributed simulation system, to meaningfully collaborate to simulate a common scenario or virtual world. Their collaboration is normally based on the run-time exchange of simulation data or services, typically using an interoperability protocol such as DIS, ALSP, or HLA. Like composability, two types of simulation interoperability can be identified: (1) technical interoperability (compatible, correct use of the interoperability protocol) and (2) substantive interoperability (exchange of information that is mutually consistent with the interoperating simulations’ model semantics) [19].8 Substantive interoperability has also been called meaningful interoperability [20]. It should be clear that these two types of interoperability are closely analogous to the definitions given earlier for engineering and modeling (or syntactic and semantic) composability. How, then, do interoperability and composability differ? Essentially, interoperability is the ability to exchange data or services at run-time, whereas composability is the ability to assemble components prior to run-time [6]. Note that interoperability as usually meant only applies to interoperating federates, analogous to the federate level of composability. Interoperability is normally thought of as a property of federates, not of models or data. It can be seen that interoperability is necessary but not sufficient to provide composability. Composability (engineering and modeling) does require interoperability (technical and substantive). Federates that are not interoperable can not be composed, so interopability is necessary for composability.9 However, interoperability is not sufficient provide composability, i.e., federates may be interoperable but not composable. Recall that an essential aspect of composability is the ability not just to combine federates but to combine and recombine federates into different simulation systems. Federates that are interoperable in one specific configuration or with one specific object model, and cannot be combined and recombined in other ways, are not composable. Non-persistent federations sometimes provide examples of interoperability without composability. A nonpersistent federation is one that exists for the purpose of supporting a specific event, exercise, or experiment and is not intended to persist beyond that purpose.10 Examples 8 HLA compliance primarily establishes technical, not substantive, interoperability. 9 Also, federates that are composable are necessarily interoperable. of this type of federation include the Platform ProtoFederation [21] and the MV-22 Osprey operational evaluation federation [22]. The federates of nonpersistent federations are necessarily interoperable, in that they interoperate during execution, but they are composable if and only if the set of federates in the federation can be changed without requiring substantial additional integration effort. The matter of substantial effort is crucial to the distinction between interoperability and composability. Integration is the process of configuring and modifying a set of components to make them interoperable and possibly composable. Essentially any federate can be integrated into any federation with enough effort, but composability implies that the changes can be made with little effort. The ability to readily combine and recombine is what distinguishes composable simulations from integrated or interoperable simulations. Configurability is the ability to include varying numbers of identical federates in a federation, e.g., “generating an exercise with eight rather than four M1A2 tank [simulators]” [3]. This capability is not the same as the ability to combine and recombine simulation components into different simulation systems that defines composability. 7. Composability Research There has been some composability research, primarily focused on engineering composability, giving attention to the interfaces and control mechanisms to compose previously existing software modules or models of behavior. Some module level composability has been achieved using dynamically loadable modules [23]. The degree to which object frameworks can achieve a composable computer generated forces architecture has been investigated [10]. That study concluded that composability based on object frameworks is “an implementation issue.” Multiple efforts have worked towards allowing the composition of autonomous behaviors into more complex composite behaviors [24] [17]. Architectures that support composability have been designed [6]. There has been less research into composability theory, even though the need for such research has been recognized [5] [25]. The latter reference states the need clearly: “We are discovering that unless models are designed to work together, they don’t (at least not easily 10 Indeed, in the context of accreditation it could be argued that all federations are non-persistent because the accreditation of a federation is by definition for a specific purpose only, and the use of the federation for another purpose requires a new accreditation. However, in this paper “persistent” and “non-persistent” refer to development and integration, not accreditation. and cost effectively). Without a robust, theoretically grounded framework for design, we are consigned to repeat this problem for the foreseeable future” [5]. One theoretical look at composability found that the process of selecting the set of components to meet given requirements was unexpectedly complex [26]. [7] G. M. Post, “J9 Composability Summary Comments”, Electronic mail, June 12 2002. [8] M. D. Petty and P. S. Windyga, “A High Level Architecture-based Medical Simulation”, SIMULATION, Vol. 73, No. 5, November 1999, pp. 279-285. 8. [9] United States Army, One Semi-Automated Forces Operational Requirements Document, Version 1.1, Online document at URL http://wwwleav.army.mil/nsc/stow/saf/onesaf/onesaf.htm/, August 21 1998. Summary Composability is an important concept in modeling and simulation. Composability has various meanings that differ primarily by what level of component is being composed. It is useful to be aware of these different “levels” of composability, as well as of the distinctions between syntactic and semantic composability and between composability and interoperability. 9. Acknowledgement The work was sponsored by the Office of Naval Research and the Defense Modeling and Simulation Office under contract N00014-03-1-0089. That support is gratefully acknowledged. 10. References [1] E. H. Page and J. M. Opper, “Theory and Practice in User-Composable Simulation Systems”, Presentation for DARPA Advance Simulation Technology Thrust, October 30 1998. [2] JSIMS Composability Task Force, “JSIMS Composability Task Force Final Report”, September 30 1997. [3] S. M. Harkrider and W. H. Lunceford, “Modeling and Simulation Composability” Proceedings of the 1999 Interservice/Industry Training, Simulation and Education Conference, Orlando FL, November 29 1999-December 2 1999. [4] D. R. Pratt, L. C. Ragusa, and S. von der Lippe, “Composability as an Architecture Driver”, Proceedings of the 1999 Interservice/Industry Training, Simulation and Education Conference, Orlando FL, November 29 1999-December 2 1999. [5] S. Kasputis and H. C. Ng, “Composable simulations”, Proceedings of the 2000 Winter Simulation Conference, Orlando FL, December 10-13 2000, pp. 1577-1584. [6] M. Biddle and C. Perry, “An Architecture for Composable Interoperability”, Proceedings of the Fall 2000 Simulation Interoperability Workshop, Proceedings of the Fall 2000 Simulation Interoperability Workshop, Orlando FL, September 17-22 2000, 03S-SIW-073. [10] A. J. Courtemanche and R. B. Burch, “Using and Developing Object Frameworks to Achieve a Composable CGF Architecture”, Proceedings of the Ninth Conference on Computer Generated Forces and Behavioral Representation, Orlando FL, May 16-18 2000, pp. 49-62. [11] A. J. Courtemanche and R. L. Wittman, “OneSAF: A Product Line Approach for a Next-Generation CGF”, Proceedings of the Eleventh Conference on Computer-Generated Forces and Behavior Representation, Orlando FL, May 7-9 2002, pp. 349361. [12] A. Z. Ceranowicz, “ModSAF Capabilities”, Proceedings of the Fourth Conference on Computer Generated Forces and Behavioral Representation, Orlando FL, May 4-6 1994, pp. 3-8. [13] C. Henderson and A. Rodriguez, “Modeling in OneSAF”, Proceedings of the Eleventh Conference on Computer-Generated Forces and Behavior Representation, Orlando FL, May 7-9 2002, pp. 337347. [14] A. Diaz-Calderon, C. J. J. Paredis, and P. K. Khosla, “Organization and Selection of Reconfigurable Models”, Proceedings of the 2000 Winter Simulation Conference, Orlando FL, December 10-13 2000, pp. 386-393. [15] D. D. Wood and M. D. Petty, “Electronic warfare and Distributed Interactive Simulation”, in T. L. Clarke (Editor), Distributed Interactive Simulation Systems for Simulation and Training in the Aerospace Environment, SPIE Critical Reviews of Optical Science and Technology, Vol. CR58, SPIE Press, Bellingham WA, 1995, pp. 179-194. [16] R. B. Calder, J. E. Smith, A. J. Courtemanche, J. M. F. Mar, and A. Z. Ceranowicz, “ModSAF Behavior Simulation and Control”, Procedings of the Third Conference on Computer Generated Forces and Behavioral Representation, Orlando FL, March 1719 1993, pp. 347-356. [17] S. D. Peters, N. D. LaVine, L. Napravnik, and D. M. Lyons, “Composable Behaviors in an Entity Based Simulation”, Proceedings of the Spring 2002 Simulation Interoperability Workshop, Orlando FL, March 10-15 2002. [27] M. D. Petty and E. W. Weisel, “A Formal Basis for a Theory of Semantic Composability”, Proceedings of the Spring 2003 Simulation Interoperability Workshop, Orlando FL, March 30-April 4 2003, 03SSIW-054. [18] A. Z. Ceranowicz, “Composability Wrapup”, Electronic mail, June 10 2002. 11. Authors’ Biographies [19] J. S. Dahmann, “High Level Architecture Interoperability Challenges”, Presentation at the NATO Modeling & Simulation Conference, Norfolk VA, October 25-29 1999. MIKEL D. PETTY is Chief Scientist of the Virginia Modeling, Analysis & Simulation Center at Old Dominion University. He received a Ph.D. in Computer Science from the University of Central Florida in 1997. Dr. Petty has worked in modeling and simulation research and development since 1990 in the areas of simulation interoperability, computer generated forces, multiresolution simulation, and applications of theory to simulation. He previously worked for the Institute for Simulation and Training at the University of Central Florida. He has served as a member of a National Research Council committee on modeling and simulation and is currently an Associate Editor of the journal SIMULATION: Transactions of the Society for Modeling and Simulation International. [20] D. L. Clark, S. K. Numrich, R. J. Howard, and G. Purser, “Meaningful Interoperability and the Synthetic Natural Environment”, Proceedings of the 2001 European Simulation Interoperability Workshop, London Middlesex UK, June 25-27 2001, 01E-SIW-080. [21] S. M. Harkrider and M. D. Petty, “Results of the High Level Architecture Platform Proto-Federation Experiment”, Proceedings of the 8th International Training and Education Conference, Lausanne Switzerland, April 22-25 1997. [22] L. Huntt, A. Markowich, and L. Michelletti, “Modeling and Simulation Augments V-22 Operational Testing”, Proceedings of the 2000 Interservice/Industry Training, Simulation and Education Conference, November 27-30 2000, Orlando FL, pp. 945-953. [23] D. Franceschini, J. Zimmerman, and G. McCulley, “CGF System Composability through Dynamically Loadable Modules”, Proceedings of the Eighth Conference on Computer Generated Forces and Behavioral Representation, Orlando FL, May 11-13 1999, pp. 341-347. [24] S. von der Lippe, J. S. McCormack, and M. Kalphat, “Embracing Temporal Relations and Command and Control in Composable Behavior Technologies”, Proceedings of the Ninth Conference on Computer Generated Forces and Behavioral Representation, Orlando FL, May 16-18 2000, pp. 183-192. [25] P. Davis, P. A. Fishwick, C. M. Overstreet, and C. D. Pegden, “Model composability as a research investment: Responses to the featured paper”, Proceedings of the 2000 Winter Simulation Conference, Orlando FL, December 10-13 2000, pp.1585-1591. [26] E. H. Page and J. M. Opper, “Observations on the Complexity of Composable Simulation”, Proceedings of the 1999 Winter Simulation Conference, Phoenix AZ, December 5-8 1999, pp. 553-560. ERIC W. WEISEL is a Project Scientist at the Virginia Modeling, Analysis & Simulation Center at Old Dominion University. He received a M.S. in Operations Research from the Florida Institute of Technology in 1995 and a B.S. in Mathematics from the United States Naval Academy in 1988. He is currently a Ph.D. student in modeling and simulation at Old Dominion University. His research interests include simulation formalism and composability. He is also President of WernerAnderson, Inc., a private veteran-owned small business that performs research and development in the areas of defense-related operations research and simulation. He previously served as a U.S. Navy submarine officer with experience in nuclear engineering, operations management, navigation, and joint operations.