imisné škody poľnohospodárskej produkcie acidifikáciou
advertisement

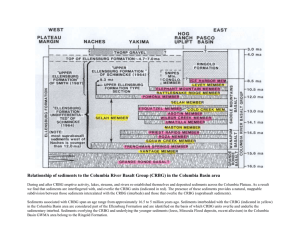
COMPARATION OF ORIGINAL AND CURRENT STATUS DIGITAL BOTTOM MODELL FOR ASSESSMENT OF BOTTOM SEDIMENTS QUANTITY OF SMALL WATER BASINS Ing. JAKUB FUSKA, Ing. JOZEF GABČO, doc. Ing. VILIAM BÁREK, CSc. Departmenta of Landscape Engineering, Horticulture and Landscape Engineering Faculty, Slovak University of Agriculture in Nitra fuska.jakub@gmail.com, viliam.barek@uniag.sk, Abstract The important water-management problem of small water basins is sedimental alluviation caused by erosion processes in the watershed of rivers and streams. For the right functionallity of small water basins it is necessary to periodically purify the bottom. For the scheduling of purification, quantification of water mass capacity is necessary to know the physical, biological and chemical composition and estimation of removed sediments quantity. This article is about the last, but not least point- estimation of water basin sediment mass. The comparation of original and current bottom model is a viable option. For this purposes, a GIS application creates two models from different data sources. Digital model of original bottom can be created from original project documentation using original maps, technical drafts or geodetical measurings of bottom in the time of creation of water basin. Digital model of original bottom can be created from a variety of geodetical measurings as sections, topographical measurings of drained basins and so on. The other option is to measure the bottom in almost any status (filled or drained water basin) by using of GPS measuring for position assessment and SONAR measuring for depth assessment. Comparation of this two models provides the GIS application, which allows us to determine the quantity of bottom sediments, actual water capacity of water basin, maximal depth and other characteristics. This data can be used for ecological, technical and watermanagement planning. Key words: water basin bottom model , assessment of bottom sediments Introduction STN 73 6824 says, that small water basins are those, which have the following characteristics: - Mass of basin is smaller than 2 mil. m³ - Maximum depth is 9 mQ - 100 is smaller than 60m³/s (STN 73 6824) Small water basins are in accordance to water source divided to: - Rain basins (water source – rain or snow water) - Spring basins (water source – spring in bottom or waterside) - River or stream basins (water source – natural water flow) (Rybársky, a kol.,1991) Bottom sediments are erosion particles from agricultural or forest soils from watershed of main waterflow and tributarry waterflows, which are its watersources. They have characteristics same as the ground layer of eroded soils. Chemical, physical and mechanical composition of sediments is function to the geologic build of area and the human activities in this area, and that determines its heterogenity. Quality and characteristics of bottom sediments shows all the inputs to agricultural soil and industry (with waste water). (Holobradý a kol., 1997) One of the options for the manipulation with bottom sediments is application to agricultural soils. This manipulation is described in Law nr. 188 / 2003 about application of wastewater treatment plant sludge and bottom sediments to the soil, Law nr. 223/2001 abut waste and STN 46 5735 – Industrial composts. In STN 46 5735 there are determined the requirements for characteristics of industrial composts, which describes the bottom sediments too. Industrial compost must be brown, gray-brown or black homogene mater with lumpy structure, wihout inseparable particles. (STN 46 5735) MATHERIAL AND METHODS The installation of GPS reciever and sonar seems to be the best solution for bottom mapping of small water basins. The measuring will be done from small rubber boat. The bottom will be measured in points during the sailing. In accordance to high precission of GPS measuring, the RTC reciever will be used. The installation will measure the position of points (GPS reciever) and the water depth in the point of measuring (SONAR). If GPS position in X and Y axis describes the point in bottom, then we have to subtract the sonar-measured depth and distance between GPS and sonar to get the Z coordinate of point in bottom of water basin (Fig. 1). Figure 1.: GPS – sonar instalation The thickness of sediment layer will be done with comparation of nowadays bottom with original bottom. The measurings will be used to create the model of the bottom in nowadays. The second model – model of original bottom, will be created from the older plans of basin construction, geodetic measurings and other parts of project documentation. Then we can compare these models and asset the mass of bottom sediments. The main idea of comparation is shown in fig. 2. Figure 2.: Comparation of original and actual bottom The crucial part of this method is data collection of GPS measurings. GPS system Global position system (GPS) is system based on satellites in the cosmos managed from the control stations on Earth. The services of this system are accesable from almost any part of the Earth surface. The only limitation is the direct visibility to the sky for recieving the signal from satellites. Cosmic segment of system is made of 24 satellites, which send navigation signals to the Earth’s surface. They are recieved by GPS reciever. Reciever is small, mobile electronic device, which recieves navigation signals, process them and based on signals determines the position. (Rapant, 2002) Principle of position determination This principle is quite simple. Satellites orbit the Earth in distace 20200km from the earth surface and emmits Navigation codes, which are decoded by reciever. This signal is in form of time of emmit. Simultaneously the reciever compare the time os recieve the signal and use this comparation to calculate the distance between satelite and reciever. The position is then calculated from the signals of 3 and more satellites as the transection of distances from satellites with known position. (Rapant, 2002) Refinement of GPS measurings Averaging Average value of measuring in the duration of few hours on the measured point. Practic results shows that after 8 hours of measuring the precision is not getting better in time. Postprocessing This method does not require direct communication with GPS reciever in real timethe data are obtained later (mostly via internet) for the time period of measuring Real-time corrections (RTC) Reciever obtains the satelite signals and the data about ionosphere. Ionospheric data are distributed from correction stations on the Earth’s surface, where is made continuous position measuring of known points, which provides the determination of ionospheric changes in actual time of measuring. (Klimánek, 2006) Sonar system Typic sonar consists of two basic components – reciever and recorder. Reciever is combination of emmiter and reciever (hydrophone). Reciever sends the signal (sound vibration), which is reflected from the bottom. This reflected signal travesl back to the reciever. From the calculation with known time from sending and recieving the signal and the velocity of sound in liquids the recorder calculate and record the data of depth form reciever to bottom. (Lurton, 2002) RESULTS AND DISCUSSION For the assessment of quantity of bottom sediments it is necessary to get the precise measuring of the bottom, but also prepare the representative model of original bottom. Comparation of these two models provides the quantification of actual water mass in water basin and mass of sediments. Nowadays the GIS applications offers a few types and methods of creation of models. Because of character of water bottom relief and sedimentation process we assume, that the direction of bottom will be continuous, without the presence of expressive breaks (singularities). This is why we will use the polyedric model. Basic surface of polyedric model is created of points (vertex), which creates the edges.These edges determines the faces of model. Input data are created of X, Y, Z coordinates of vertex. That means the edge connects two points and divide two faces. The face is bordered by three edges and represents the flat surface. (Klimánek, 2006) Final comparation of models (model of actual and original bottom) then describe many characteristics as: - Total amount of sediments - Maximum thickness of sediments - Total water capacity of water basin - Bottom slope, depth and profile of water basin in any point or direction CONCLUSION The usage of this method will confirm or disconfirm the expectations of precision, time and economic effectivity of this method and the options of usage of this methot for watermanagement, environmental, engineer, agricultural and ecological purposes. LITERATURE Holobradý, K., Ilka, P. 1997. Metodika priamej aplikácie stabilizovaných čistiarenských kalov a dnových sedimentov 1997. 11,12 s. ISBN 80 – 85361 – 25 – 6 Klimánek, M., 2006. Digitální modely terénu. Mendelova zemědělská a lesnícká univerzita v Brně, 2006. 85 s. ISBN 80-7157-982-3 LURTON, X., 2002. An introduction to underwater acoustics: principles and applications. Chichester: Springer. 2002. 480 s. ISBN 3-540-42967-0 Rapant, P., 2002. Družicové polohové systémy. VŠB-TU Ostrava 2002. 202 s. ISBN 80-2480124-8 Rybársky, I., Švehla, F., Geissé, E., 1991. Pozemkové úpravy. Bratislava 1991. 213, 222 s. ISBN 80-05-00873-2 STN 46 5735, 1991: Priemyselné komposty STN 73 6824, 1978: Malé vodné nádrže Contact adress: Ing. Jakub Fuska, Slovak University of Agriculture in Nitra, Horticulture and Landscape Engineering Faculty, Departmenta of Landscape Engineering, Hospodárska 7 Nitra, Slovakia, E-mail: fuska.jakub@gmail.com,