Note 4
advertisement

Optimum Noise Filtering
Overview of Noise Filtering
Introduction: The goal of noise filtering is to extract the signal of interest from
random noise.
Important factors:
o Signal information
o Noise information
o Signal-to-noise (S/N) ratio
o Distortion
o Implementation
Signal information:
o Deterministic signals–The signal of interest is known. The goal is to detect the
signal with the presence of noise. For examples: Radar or sonar echoes,
tracking device signals, and digital signals
o Random signals–Only the statistical properties of the signal of interest are
known. The goal is to detect and/or estimate the signal with the presence of
noise. For examples: Radio signals, image data, and seismic signals.
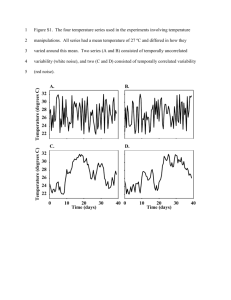
Noise information:
o White noise – The spectrum of white noise is constant. This assumption is
appropriate for many kinds of noise phenomena. White noise can be handled
easily but sometimes this assumption oversimplifies the problem.
White noise
o Band-limited white noise – The spectrum of band-limited white noise is
constant within a specified frequency band and is zero outside the band.
Unlike a white noise process, a band-limited white noise process has finite
energy, a requirement that must be satisfied for any physical process.
Low-pass
white noise
Band-pass
white noise
o 1/f noise – The spectrum of 1/f noise is proportional to 1/f . As a result, the
1/f noise process mainly produces noise components at low frequencies.
1/f noise
o Other noise types – Man-make noise, atmospheric disturbances, and …
Signal-to-noise (S/N) ratio:
o Maximizing signal energy – To maximize received signal energy we need to
increase the gain (decrease the loss) at the frequency bands where the signal
of interest is strong compare to noise.
o Minimizing noise energy – To minimize received noise energy we need to
decrease the gain (increase the loss) at the frequency bands where the signal
of interest is weak compare to noise. For example, the gain should be 0 (loss =
) at frequencies where the signal energy is negligible.
o The gain should be zero (the loss should be infinite) outside the signal
frequency band.
Distortion:
o Maximum S/N ratio usually requires the system to have a non-uniform
frequency response.
o Non-uniform frequency responses introduce distortion because signal
components at different frequencies are amplified (attenuated) differently.
o A practical system has to consider the trade-offs between noise and distortion.
Implementation:
o A physical system cannot provide infinite energy – an all-pass filter is
impossible to build.
o A physical system must be casual – discontinuities in the response spectrum
cannot be realized.
o A physical system must be stable – RHP poles are not allowed.
Matched Filters
Introduction: When the signal of interest is known and the goal is to detect its
presence, a matched filter is used to maximize the S/N ratio of the detection process.
Basic principles:
o Background noise is assumed to be white noise or band-limited white noise
with the noise bandwidth encompasses the entire signal spectrum.
o The signal of interest is deterministic.
o Background noise is assumed to be additive: Input = signal + noise
s(t)
n(t)
y(t)
h(t)
yo(t)
o If the frequency response of the filter matches the frequency spectrum of the
signal, the S/N ratio is maximized.
At frequencies where the signal is strong, the system gain should also
be high to enhance the difference between the signal and the noise.
At frequencies where the signal is weak, the system gain should also
be low to de-emphasize the noise energy at these frequencies.
At frequencies where the signal energy is negligible, the system gain
should be zero to filter out the out-of-band noise.
o Because of the non-uniform frequency response, the filter output is distorted.
o This technique is ideal for signal detection since in this case only the signal
energy (with respect to noise), not the actual shape, is.
o This technique is not useful if the shape of the signal waveform is unknown.
Mathematical details:
o From linear system theory the output is obtained from the convolution
integral:
yo (t ) h(t ) y ( )d h( ) y (t )d
h( ) s (t )d h( )n(t )d so (t ) no (t )
For a white noise input with unity magnitude the S/N ratio at t = T is:
2
(S / N ) 2
T
2
2
h
(
)
s
(
T
)
d
h
(
)
d
s (T )d
2
s (T )
o 2
E[no (T )]
2
2
h ( )d
h ( )d
Note: The inequality is the direct result of the Schwarz inequality. The
equality holds if the following is true:
h
2
( )d
s
2
(T )d , which means: ( S / N )
2
T,
max
s 2 (T )d .
o In general, the following filter response can maximize the S/N ratio if the
autocorrelation function (or the auto-spectrum) of the input noise is known:
S ( f ) j 2 f T
H( f )
where is an arbitary constant, T is the
e
S nn ( f )
observatio n period, and S nn ( f ) is the autospectr um of the noise process.
o For white noise process, the impulse response of the matched filter is:
h(t ) s (T t ) for t 0
s(t)
0
h(t)
T
t
Numerical examples:
o Rectangular pulses:
Noise
Noise Spectrum
5
N
n
20 log
0
5
5
S
20
Signal
100
n
0
20
200
1
n
20 log
S_F
n
5
Signal Spectrum
10
100
n
0
0
n
N_F
20
40
100
Signal + Noise
n
200
1
10
n
100
Frequency10Response
100
S + N Spectrum
5
0
T
20 log
0
n
T_F
n
20
5
5
h0
Impulse 100
Response
200
n
0
20 log
0
n
1
n
H0
n
5
20
40
100
n
200
1
Output
10
n
100
Output Spectrum
40
400
out
2
n
20 log
200
0
out_F
n
20
0
100
n 20
200
1
10
n
100
o Saw-tooth pulses:
Noise Spectrum
Noise
5
0 if ( n W )
Shapen
n
20
W
(n W
otherwise
20
N
n
20 log
0
N_F
n
5
20
100
Signal n
200
1
100
0
20 log
0
n
10
Signal nSpectrum
5
S
0
S_F
n
5
Tn
Sn
Nn
20
40
100
Signal + Noise
n
200
1
10
100
S + Nn Spectrum
5
0
T
20 log
0
n
T_F
hm n
0 if ( n m)
n
n
m
otherwise
20
20
5
100
n
Impulse Response
200
1
5
h0
n
20 log
0
H0
n
200
1
10
100
Output nSpectrum
100
2
20
40
100
Output n
n
100
0
5
out
10
n Response
Frequency
40
20 log
50
out_F
n
20
0
0
100
n 20
200
1
10
n
100
h0n
h 900 1000
(n m
n
2
Examples:
o White noise process:
s(t) e -t for t 0 S ( f )
-j 2 f T
e
H( f )
1 j 2 f
h(t )
0
o Realistic low-pass noise:
y (t ) Acos 2 f C t n(t ) for
s (t )
1
1 j 2 f
e
-j 2 f (T t )
1 j 2 f
-(T t ) for t T
df e
0
otherwise
0t T
A
( f f C ) ( f f C )
2
E[n(t )n(t )] e
S ( f ) F{ Acos 2 f c t}
E[n(t )] 0,
S * ( f ) j 2 f T
S nn ( f ) F{e
}
hF
e
1 4 2 f 2
S nn ( f )
A
A
e 2 f (T t ) e 2 f (T t )
cos 2 f C (T t )
2
2
1 4 2 f C 2
1 4 f C
constant
2
1
Radar echo detection:
X
Matched
filter
Detector
Display
Matched filter implementation
Matched filter
y(t)
T
0
yo(t)
s(t)
T
T
T
0
0
0
yo (t ) y( ) h(T ) d y( ) s(T T ) d y( ) s( ) d
Wiener Filters
Introduction: The matched filter technique requires the exact knowledge of the signal
and thus is used for detection only. If we need to reconstruct a signal with minimum
distortion and only the statistical properties of the signal is available, the Wiener filter
technique can be used for this purpose (signal estimation).
Basic principles:
o The filter that minimizes the mean-square error (minimum distortion) has the
following transfer function H( f ).
S (f)
S ss ( f )
H ( f ) ss
S yy ( f ) S ss ( f ) S nn ( f )
o It is called the Wiener filter. More information on optimum filtering can be
found in Cooper; Probabilistic Methods of Signal and System Analysis, 2nd
edition, p. 402-411.
o The above transfer function can be implemented numerically for pre-recorded
data but is not physically realizable because it is non-casual. The following
steps convert the non-casual Wiener filter into a casual one.
1) Express Syy( f ) as a product of two factors:
S yy ( f ) S ss ( f ) S nn ( f ) Ayy ( f ) Ayy ( f )
where Ayy ( f ) has all of the LHP poles and zeros and Ayy ( f ) has all of
the RHP poles and zeros. Split the poles and zeros on the j axis
evenly to both planes.
j
2) Use partial fraction expansion:
S ys ( f )
B ( f ) B ( f )
Ayy ( f )
where B ( f ) has all of the LHP poles and zeros and B ( f ) has all of
the RHP poles and zeros. Split the poles and zeros on the j axis
evenly to both planes.
Note: if n(t) and s(t) are uncorrelated, S ys f S ss f
3) The transfer function of the casual Wiener filter is given by:
B ( f )
B ( f ) j 2 f t
H( f )
h(t )
e
df
Ayy ( f )
A (f)
yy
Example:
t
1) Rss (t ) e
S nn N 0
t
S ss ( f ) F{Rss (t )} F{2e }
2
S ys ( f )
1 4 2 f 2
For a non-casual filter:
S ss ( f )
2 1 4 2 f 2
1
H( f )
2 2
S ss ( f ) S nn ( f ) 2 1 4 f N 0 1 N 0 2 1 (2 f ) 2
S yy
S yy
S yy
Step 1:
S yy S ss ( f ) S nn ( f )
N0
2 N 0
2
1 4 f
2
N0
2 N 0
N0
N0
K2
N0
2 N 0
S ys ( f )
Ayy ( f )
Ayy ( f )
,
2
N 0 j 2 f (1 j 2 f )
N0
2 N 0
N 0 j 2 f
1 j 2 f
1 j 2 f
j 2 f
2 N 0
N0
1
N0 1
1 j 2 f
2 N 0
N0
N0
,
1
2 N 0 N 0 j 2 f
N0 1
1 j 2 f
N0 1
K2
2 N 0 N 0 j 2 f
1
K1
1 2 N 0 N 0
B ( f )
Ayy ( f )
B
K1
1 j 2 f
2
1
N 0 1 2 N 0 N 0 1 j 2 f
Step 3:
H0 ( f )
2 N 0
j 2 f 1
N0
2
N0
1
2 N 0
B ( f )
h0 (t )
N 0 j 2 f
2 (1 j 2 f )(1 j 2 f )
2 N 0 N 0 j 2 f 1 j 2 f
1
1 j 2 f
N0
2 1 4 2 f 2
2 N 0 N 0 j 2 f
1
2 N 0 N 0 j 2 f
K1
N 0 j 2 f
N 0 2 N 0 N 0 (2 f ) 2
1 (2 f ) 2
1 j 2 f
S (f)
ss
Ayy ( f ) Ayy ( f )
2 N 0
N 0 j 2 f
Step 2:
S ys ( f )
N0
(1 j 2 f )(1 j 2 f )
Ayy ( f )
2
1
2 N 0 N 0 j 2 f
,
B ( f )
2 N 0 N 0 1
2 N 0 N 0 j 2 f
N0
2 N 0 N 0 1 1 j 2 f
2 N 0 N 0 1
2 N 0 N 0 j 2 f 1 j 2 f 2 N 0 N 0 j 2 f
( f ) Ayy ( f ) e j 2 f t df
2 N 0
N 0 1 exp
2 N 0
N 0 t u (t )