Example
advertisement

{finish spatial power of tractions}
Example 1
A Compressible Neo-Hookean Material undergoing
Homogeneous Stretch and Rotation
Motion
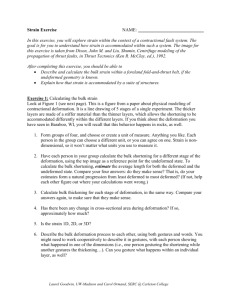
Consider the deformation of a cubic block of material, with sides of length 1, initially
occupying the region 0 X 1 , X 2 , X 3 1 . The subsequent motion of the material is
given by
f (X, t ) x X 1 tX 2 e1 tX 1 X 2 e 2 X 3e 3
This is a two-dimensional motion, with the material stretching and rotating about the
X 3 axis, as illustrated.
t 0
t2
t 1
The spatial description of the motion is obtained by inverting these equations:
f 1 (x, t ) X
x1 tx2
tx x
e1 1 2 2 e 2 x3e 3
2
1 t
1 t
Deformation
The deformation gradient is
1 t 0
x
F
t 1 0 ,
X
0 0 1
F 1
1
1 t 2
t
2
1 t
0
t
1 t2
1
1 t2
0
0
0
1
This deformation is homogeneous, meaning that the deformation is the same for all
points (F is independent of position). The Jacobian determinant is
J
dv
det F 1 t 2
dV
The right Cauchy-Green tensor is
1 t 2
0
T
C F F 0
1 t2
0
0
0
0
1
For example, the stretch for a line element (in the reference configuration) in the
direction dX e1 is given by 2 e1 C e1 C11 1 t 2 . In this simple case of a
homogeneous deformation, this stretch for line elements in the direction e1 is the
same for all points in the material.
The left Cauchy-Green tensor is b F F T and equals C is this example. It follows
that the stretch of a line element (in the current configuration) in the direction dx is
given by
1 t 2
0
1
dx
0
1 t2
2 dx
0
0
0
dx
0
dx
1
For example, in the direction dx e1 2e 2 at t 2 , the stretch is
5.
The deformation can be decomposed into stretch tensors through F R U or
F v R , where U and v are, respectively, the right (material) and left (spatial)
stretch tensors. Since C is diagonal,
1 t2
U C 0
0
and
0
1 t2
0
0
0
1
R FU
1
1
2
1 t
t
1 t2
0
0
0
1
t
1 t
1
2
1 t2
0
which is proper orthogonal, R R T I, det R 1. The deformation can thus be
decomposed into a pure stretch along the principal (material) axes, which here are just
the axes e1 , e 2 , e 3 , and then followed by a rotation about the X 3 axis. For example, at
t 1 , the rotation is 45 o clockwise.
The left stretch tensor is now obtained from v F R T and it turns out to be the same
as U (and b v 2 ). Thus the deformation can also be decomposed into, first, a rigidbody rotation, followed by a pure stretch to the subsequent configuration. For
example, considering the configuration at t 1 (see figure above), first rotate
clockwise by 45 o ; then the rotated line elements dx (1) (1 / 2 )e1 1 / 2 e 2 ,
dx
( 2)
2e1 map to the final positions v dx
(1)
e1 e 2 and v dx
( 2)
2e1 .
Nanson’s formula, nds JF T NdS , relates unit normals in the reference and current
configurations. Each of the six sides of the block has surface area dS 1 and
ds 1 t 2 . For example, the unit normal N e 2 is mapped to the unit normal
n te1 e 2 / 1 t 2 through
n1
n
2
n3
N e2
n
t
1 t2
1
1 t2
t
1 t 2 1 t 2
2
1 t
0
e1
1
1 t2
t
1 t2
1
1 t2
0
0
0
0 1
1 0
e2
Rates of Deformation
The velocity is (in the material description – the material coordinates are constant)
V ( X, t )
dx d
X 1 tX 2 e1 tX 1 X 2 e 2 X 3 e 3 X 2 e1 X 1e 2
dt dt
The velocity in the spatial description can be obtained by substituting into the above
expression the motion X f 1 (x, t ) , to get
v(x, t )
tx1 x2
x tx
e1 1 2 2 e 2
2
1 t
1 t
These two velocities are the same, they are the velocities of material particles in the
material, expressed in two different ways.
The acceleration is zero, A( X, t ) dV / dt 0 . The acceleration can also be obtained
directly from the spatial velocity using the material time derivative,
a(x, t )
dv(x, t ) v(x, t )
grad v v
dt
t
which turns out to be zero.
The spatial velocity gradient is now
t
1 t2
1
l grad v
2
1 t
0
1
1 t2
t
1 t2
0
0
0
0
This can be decomposed into its symmetric and skew-symmetric parts: the rate of
deformation
d
t
1 t 2
0
0
0
1
2
1 t
0
1
l lT
2
0
t
1 t2
0
0
0
0
and the spin
w
1
l lT
2
1
1 t2
0
0
0
0
0
The skew-symmetric spin can be written in the form of a vector, the angular velocity,
ω w23e1 w13e 2 w12e 3
1
e3
1 t 2
which clearly corresponds to a clockwise rotation of material particles about the e 3
axis.
Note also that
div v
v1 v2 v3
2t
x1 x2 x3 1 t 2
so that the rate of change of the volume ratio dv / dV is
J Jdiv v 2t
Stress
Suppose now that the Cauchy stress is
1 2 / 3 2
t
0
0
ln J 3 J
1
σ J 1
0
ln J J 2 / 3t 2
0
3
2 2 / 3 2
0
0
ln J J t
3
The Equations of Motion
The equations of motion in the spatial description are div σ b v and it can be
seen that the Cauchy stress is uniform throughout the material at any time instant,
div σ ij / x j o . There are also no accelerations and so there are no body
forces.
The PK1 stress is
P Jσ F T
1 2 / 3 2
t
ln J 3 J
1 t2
ln J 1 J 2 / 3 t 2
3
t
1 t2
0
1
3
t
1 t2
1
ln J J 2 / 3t 2
3
1 t2
ln J J 2 / 3t 2
0
0
0
2
ln J J 2 / 3t 2
3
The equations of motion in the material description are Div P B 0 A and these
three terms are also zero.
Balance of Mechanical Energy
Material Description
The PK2 stress is
S JF 1 σ F T
1 2 / 3 2
t
ln J 3 J
1 t2
0
0
0
1
3
1 t2
ln J J 2 / 3t 2
0
0
0
2
ln J J 2 / 3t 2
3
Also,
t 0 0
E F T d F 0 t 0
0 0 0
and then the stress power is
2t
S:E
1 t2
1 2 / 3 2
t
ln J 3 J
The same result can be obtained by using the alternative stress power expression,
P : F .
The stress power is independent of position within the material, and the volume in the
undeformed configuration V is unity so the total stress power is
2t
1
ln J J 2 / 3t 2
2
3
S : E dV S : E 1 t
V
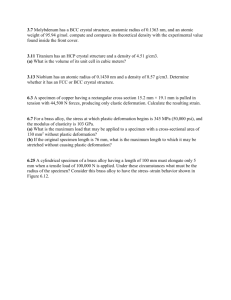
Look now at the power of the power of the surface tractions: T VdS . The velocity
dS
is zero over the front and back faces (the sides with unit normals e 3 ), and is nonzero over the other four sides (with normals in the reference configuration e1 , e 2 ).
The PK1 traction is given by T P N and is shown in the figure for these four faces,
and given below (the PK1 stress is uniform throughout the material).
T( 2) P e 2 P12 e1 P22 e 2
T(3) P (e1 ) T(1)
T(1) P e1 P11e1 P21e 2
T( 4) P (e 2 ) T( 2)
1 2 / 3 2
t e1 te 2 ,
ln J 3 J
1
1
ln J J 2 / 3t 2 te1 e 2 ,
2
3
1 t
T(1)
T( 2 )
1
1 t2
Substituting in the velocity V X 2 e1 X 1e 2 now leads to
T(3) T(1)
T( 4 ) T( 2 )
T VdS T X
(1)
dS
e e 2 dS (1)
T e
2 1
dS(1)
( 2)
1
X 1e 2 dS ( 2 )
dS( 2 )
T X e dS
( 3)
2 1
( 3)
dS( 3 )
T X e dS
( 4)
1 2
( 4)
dS( 4 )
1 1
1 1
T(1) X 2 e1 e 2 dX 2 dX 3 T( 2 ) e1 X 1e 2 dX 1 dX 3
0 0
0 0
1 1
1 1
0 0
0 0
T(1) X 2 e1 dX 2 dX 3 T( 2 ) X 1e 2 dX 1 dX 3
1
1
1
1
T(1) e1 e 2 T( 2 ) e1 e 2 T(1) e1 T( 2 ) e 2
2
2
2
2
2t
1
ln J J 2 / 3t 2
2
3
1 t
which equals the stress power, and so the mechanical energy is balanced:
dV
T V dS B V dV S : E dV V dt
S
V
V
dV
V
Spatial Description
In the spatial description, the stress power is
σ : d J 1
2t
1 t2
1 2 / 3 2
ln
J
J t
3
The total stress power in the material, with dv JdV , is then
2t
1
ln J J 2 / 3t 2
2
3
σ : ddv σ : d dv Jσ : d 1 t
v
v
In the spatial description, the power of the surface forces is t v ds . Again, we only
s
need to look at four sides, since the velocity is zero over the front and back. The unit
normals to these four faces are shown in the figure.
n (3) n (1)
1
n ( 2)
1 t 2
te1 e 2
n ( 4 ) n ( 2 )
1
n (1)
1 t 2
e1 te 2
The tractions acting over these surfaces are then obtained from Cauchy’s law,
t σ n . Examining the first surface, the velocities of particles there are those for
particles with material coordinates X 1 1 , so, eliminating x1 ,
X1
tx x
x1 tx2 1 t 2 , v (1) 1 2 2 e1 e 2 t x2 e1 e 2
1 t X1 1
x1 tx2
1
1 t 2
The integration over
1
1
dX dx 1 is straightforward. The integration over
dX in the reference configuration corresponds to the
integration dl in the current configuration. With
3
0
0
3
1
2
0
dl
dx2
dx1
dl (dx1 ) 2 (dx 2 ) 2 1 t 2 dx 2 over this surface, we have
dl
1t
1 t 2 dx 2
t
The double integral in the reference confuguration
to the integral
f (x) J dx dx
2
3
J 23
f (X)dX
2
dX 3 can be converted
where J is the Jacobian for the change of variable:
X 2 / x2
X 2 / x3
X 3 / x2
X 3 / x3
1
1 t 2
The limits of integration are obtained
Thus the complete expression of the power of the tractions is
t v ds
s
1 1t
1
1
t v (1) dx 2 dx3
2 (1)
1 t 0 t
1 t2
1
1 t2
1 1 t
t
( 2)
v ( 2 ) dx1 dx3
0 t
1 1
t (3) v (3) dx2 dx3
0 0
1
1 t2
1 1
t
( 4)
0 0
v ( 4 ) dx1 dx3
The integral over the first surface is then
t (1) v (1) ds
s
1
1 t2
1 1 t
t
J 1
(1 t 2 ) 3 / 2
(1)
v (1) dx 2 dx3
0 t
J 1
(1 t 2 ) 3 / 2
1 1t
e
te 2 t x 2 e1 e 2 dx 2 dx3
1
0 t
1 1t
2t x dx dx
2
2
3
0 t
J 1
t 1 / 2
(1 t 2 ) 3 / 2
where ln J J 2 / 3t 2 / 3 .
1
1 t2
1 1 t
t
0 t
(1)
1
1 t2
1 1 t
J 1
v (1) dx1 dx3
(1 t 2 ) 3 / 2
1 1
t (3) v (3) dx2 dx3
0 0
te
1
e 2 e1 x1 t e 2 dx1 dx3
0 t
1 1 t
J 1
(1 t 2 ) 3 / 2
2t x dx dx
1
1
3
0 t
J 1
t 1 / 2
(1 t 2 ) 3 / 2
J 1
(1 t 2 ) 3 / 2
e
J 1
(1 t 2 ) 3 / 2
1 1
1 1
1
te 2 x 2 e1 dx 2 dx3
0 0
x dx dx
2
2
3
0 0
J 1
1 / 2
(1 t 2 ) 3 / 2
1
1 t2
1 1
t
0 0
( 4)
J 1
v ( 4 ) dx1 dx3
(1 t 2 ) 3 / 2
J 1
(1 t 2 ) 3 / 2
1 1
te
1
e 2 x1e 2 dx1 dx3
0 0
1 1
x dx dx
1
0 0
J 1
1 / 2
(1 t 2 ) 3 / 2
1
3
and the total is
t v ds J
s
1
2t
ln J J 2 / 3t 2 / 3
2 3/ 2
(1 t )
and so the mechanical energy is balanced in the spatial description:
dv
t v ds b v dv σ : ddv v dt dv
s
v
v
v
Strain Energy and Conservative Force System
The above Cauchy and PK2 stresses were actually derived from the strain energy
function
1
1
2
W ln J J 2 / 3 I b 3
2
2
This is the strain energy of a compressible Neo-Hookean material. It is a hyperelastic
model (since the stress is obtained from a strain energy function) of an isotropic
material (since the Cauchy stress is a function of the left Cauchy-Green strain b only).
Here, J det F . We write this in terms of the third invariant of b, III b det b :
III b J 2 . Differentiating W now gives J / III b III b / III b 1 / 2 J , so
W
W W
W 2
σ 2 J 1
III b I 2 J 1
I b b 2 J 1
b
III b
I b II b
II b
W J 2
W
2 J 1
J I 2 J 1
b
J
III
I
b
b
1
J 1 ln J I J 2 / 3 b trb I
3
The PK2 stress can also be obtained directly through
W W
W
W
S 2
I b I 2
C2
III b C 1
II b
III b
I b II b
1
ln JC 1 J 2 / 3 I trC C 1
3
leading to the PK2 stress given earlier.
1
1
2
Explicitly, from W ln J J 2 / 3 I b 3 , the time derivative of the strain
2
2
energy is
1
d
1
W J 1 J ln J J 2 / 3 trb J 2 / 3 trb
3
dt
2
Now J Jdiv v so
J 1 J div v
2t
1 t2
and
trb 3 2t 2
d
trb 4t
dt
so
2t
W
1 t2
1 2 / 3 2
t
ln J 3 J
It can be seen that this time derivative of the strain energy is precisely the stress
power, as expected for a hyperelastic material:
W 1 U
Jσ : d S : E
0
Here, U is a strain energy per unit mass, whereas W is the strain energy per unit
(reference) volume.