RWA Optical network design problem,
advertisement

ILP formulations and solution techniques
For Optical network design problems
By
Zein ElAbedin Mohamed Wali
B.Sc. in Electronics and Communications Engineering – Cairo University
A Thesis Submitted to the
Faculty of Engineering at Cairo University
in Partial Fulfillment of the
Requirements for the Degree of
Master of Science
in
Engineering Mathematics and Physics Department
Supervised by
Dr. Abd ElKarim Shaban Omr
Assoc. Professor, Faculty of Engineering, Cairo University
Dr. Khaled Mohamed Fouad Elsayed
Assoc. Professor, Faculty of Engineering, Cairo University
Faculty of Engineering, Cairo University
Giza, Egypt
2005
i
TABLE OF CONTENTS
LIST OF ABBREVIATIONS AND ACRONYMS .................................................. iv
LIST OF FIGURES
v
1.
Introduction & Terminology ................................ 1
1.1.
Introduction:............................................................................... 1
1.2.
Multiplexing techniques: ........................................................... 3
1.3.
Optical WDM networks: ........................................................... 4
1.4.
RWA problem: ........................................................................... 6
1.4.1.
Wavelength conversion: ............................... 8
1.5.
Multicasting: ............................................................................. 11
1.6.
Thesis Organization (incomplete): ......................................... 13
2.
Survey of literature ............................................. 14
2.1.
Technical Classification for RWA: ......................................... 14
2.2.
Functional Classification for static RWA: ............................. 15
2.2.1.
Functional elements of
routing algorithms:
16
2.2.2.
Functio
nal elements of Wavelength Assignment algorithms:
17
2.3.
General Notations: ................................................................... 17
2.4.
Different Approaches for static RWA: .................................. 18
2.4.1.
Min-RWA, link-based, no conversion, unique requests, single fiber:
18
2.4.2.... Min-RWA, link-based, no conversion, multiple requests, single fiber: 21
2.4.3.
Min
-RWA, link-based, full-wavelength conversion, unique requests, single fiber:
23
2.4.4.. Max-RWA, path-based, no conversion, multiple requests, single-fiber: 24
2.4.5.
MaxRWA, path-based, no conversion, multiple requests, single-fiber(2):........... 26
2.4.6...Max-RWA, link-based, no conversion, multiple requests, single-fiber: 29
2.4.7...Max-RWA, link-based, no conversion, multiple requests, single-fiber: 31
2.4.8... Max-RWA, path-based, no conversion, multiple requests, mutli-fiber: 33
2.4.9.
Greedy Heuristic Approach:............... 36
2.4.10.. Min-RWA, path-based, full conversion, unique requests, single-fiber: 39
2.4.11.
Min-RWA, path-based, no conversion, unique requests, single-fiber:
42
2.4.12.
RWA, path-based, sparse conversion, unique requests, single-fiber:
2.4.13.
-RWA, path-based, sparse conversion, multiple requests, multi-fiber:
Min43
Min
47
ii
2.4.14.
2.5.
2.6.
2.5.1.
Tabu Search Heuristic Approach:
53
Technical classification for MC-RWA: .................................. 56
Different Approaches for static MC-RWA (incomplete): .... 57
c Approach, single-session, full-splitting capability:
2.5.2.
Heuristi
57
Heuri
stic Approach, single-session, sparse-splitting capability:
58
2.7.
Motivation: ............................................................................... 61
3.
Proposed Approach ............................................. 62
3.1.
Comparison: ............................................................................. 62
3.2.
Proposal: ................................................................................... 63
3.2.1
Handling multiple-fibers:......................... 63
3.2.2
Model (ILP formulation): ........................ 64
3.2.3.
Solution
uniqueness and Shortest paths preference:
68
3.3.
Network growing problem: ..................................................... 69
3.4.
Total Unimodularilty Property: ............................................. 72
3.5.
Proposed Solution Technique "TU-Based integrality
relaxation":
73
4.
Experimental Results .......................................... 78
4.2.
Performance evaluation: ......................................................... 78
4.3.
Test setup: ................................................................................. 79
4.4.
Performance metrics: .............................................................. 79
4.5.
Direct Model implementation: ................................................ 79
REFERENCES
83
iii
LIST OF ABBREVIATIONS AND ACRONYMS
ATM
B&B
DLE
EDP
FDM
FSC-OXC
Gbps
GRWA
ILP
IP
K-SP
LP
LSC-OXC
MCNF
MC-OXCs
MC-RWA
MILP
MG-OXC
nm
OTN
OXC
RWA
SD
SDM
SLE
SP
Tbps
TDM
TU
WDM
WRON
WWW
Asynchronous Transfer Mode
Branch and Bound technique for solving ILP problems
Dynamic LightPath Establishment
Edge Disjoint Paths
Frequency-Division Multiplexing
Fiber-Switch Capable OXC
Gega bits per Second
Grooming, Routing and Wavelength Assignment
Integer Program / Programming
Internet Protocol
K Shortest Path
Linear Program / Programming
Lambda-Switch Capable OXC
Multi-Commodity Network Flow
Multicast capable OXC
Multicast RWA
Mixed Integer Program / Programming
Multi-Granularity OXC
Nano-meter
Optical Transportation Networks
Optical Cross-Connects
Routing and Wavelength Assignment
Source-Destination
Space-Division Multiplexing
Static LightPath Establishment
Shortest Path
Tera Bits per second
Time-Division Multiplexing
Total Unimodularilty / Total Unimodular
Wavelength-Division Multiplexing
Wavelength Routed Optical Networks
World Wide Web
iv
LIST OF FIGURES
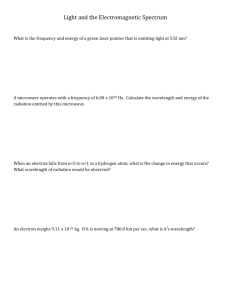
Figure 1: The low-attenuation regions of an optical fiber. ............................................ 2
Figure 2: fiber section illustrating different connections carried on different
wavelengths............................................................................................................ 4
Figure 3: A wavelength routed WDM network ............................................................. 5
Figure 4: A 3x3 optical cross-connect (OXC) with two wavelengths per fiber ............ 6
Figure 5: An NxN WDM optical Cross-connect with k-wavelengths ........................... 6
Figure 6: An example of WRON with 4 lightpaths using 2 wavelengths ..................... 7
Figure 7: conceptual RWA problem with two wavelengths per fiber ........................... 8
Figure 8: Wavelength-continuity constraint in a WRON, (a) without converter, (b)
with converter ........................................................................................................ 9
Figure 9: Wavelength conversion ................................................................................ 10
Figure 10: A WRON with 4 requests and a wavelength converter.............................. 11
Figure 11: (a) power splitter, (b) combiner .................................................................. 12
Figure 12: functional classification of Routing & Wavelength Assignment algorithms.
.............................................................................................................................. 16
Figure 13: An optical network with eight routed lighptahs ........................................ 21
Figure 14: Auxiliary graph for the Wavelength-assignment sub-problem .................. 21
Figure 15: illustration of the search phase of Routing sub-problem ............................ 24
Figure 16: illustration of model formulation of section 2.4.4 ...................................... 26
Figure 17: illustration of the model of section 2.4.5. ................................................... 29
Figure 18: Maximum coverage greedy algorithm ....................................................... 35
Figure 19: flow chart of the algorithm used for RWA based on maximum coverage
problem ................................................................................................................ 36
Figure 20: Greedy algorithm for EDP ......................................................................... 38
Figure 21: flow chart of the RWA heuristic based on greedy EDP algorithm ............ 39
Figure 22: Piecewise linear cost functions for link l.................................................... 41
Figure 23: a combined MG-OXC node and its logically separated form: (a) MG-OXC
node, (b) FSC-OXC and LSC-OXC nodes. ......................................................... 48
Figure 24: Langrangean relaxation with heuristics (LRH) .......................................... 52
Figure 25: Algorithm Tabu-RWA(), as adopted from [28] ......................................... 55
Figure 26: An example of multicasting routing and wavelength assignment. Node 2 is
considered with the 4 combinations of wavelength conversion and splitting
capabilities. .......................................................................................................... 57
Figure 27: Multicasting tree construction heuristic algorithm, as adopted from [32] . 58
Figure 28: An example multicasting forest in a NSFNET-like network with sparse
splitting ................................................................................................................ 59
Figure 29: Multicasting "forest" construction heuristic algorithm, as adopted from
[32] ....................................................................................................................... 60
Figure 30: WRON with 2 links each of 2 fibers .......................................................... 63
Figure 31: same WRON viewed as multi-graph .......................................................... 63
Figure 32: pseudo-code to calculate needed multi-fibers in network growing problem
.............................................................................................................................. 71
Figure 33: flow chart diagram for accommodating the network growing problem. .... 71
v
Chapter 1
1. Introduction & Terminology
1.1. Introduction:
"Life in our increasingly information-dependent society requires that we have
access to information at our finger tips when we need it, where we need it, and in
whatever format we need it" as quoted from Professor's Biswanath Mukherjee book
[1] , greatly emphasis our need for high-speed networks that can provide us with the
required information access.
Today's applications require more and more bandwidth usage, such as: Voice
over IP, video conferencing, java applications, World Wide Web (WWW) browsing,
etc. Not only that, but The next decade may bring to the home and office multiple
connections of high-definition television, video mail, and digital audio, as well as full
Internet connections via user-friendly graphic user interfaces. Moreover these
applications vary from business critical applications, transactions or medical
applications to even internet games.
As more users start to use data networks, and as their usage patterns evolve to
include more bandwidth-intensive networking applications, there emerges an acute
need for very high bandwidth transport network facilities whose capabilities greatly
exceed our current high-speed networks, such as those of current Internet and
Asynchronous transfer Mode (ATM) networks.
It is widely believed that the emerging fiber optic technology that supports the
development of Optical Transportation Networks (OTNs) [2] can be considered as the
promising solution for the above needs. In fact, Optical networks are considered to be
the Next-Generation Networking Paradigm, and to be a replacement of the current
implementation of the Internet, as "Optical Internet"[3] .
Fiber Optics possesses many characteristics that make it an excellent physical
medium for high-speed networking [4] . This can be illustrated using the following
figure (Figure 1) that shows the two low-attenuation regions of optical fiber. It can be
seen that usable bandwidth region is spitted over two similar regions around a
wavelength of 1300 and 1550 respectively, with an attenuation as low as 0.2 dB per
kilometer. Combined, these two regions provide a theoretical upper bound of 50 THz
of bandwidth.
1
Figure 1: The low-attenuation regions of an optical fiber, as adopted from [4].
In addition, the small size and thickness of fiber allows more fiber to occupy
the same physical space as copper, a property that is desirable when installing local
networks in buildings. Fiber is flexible, difficult to break, reliable in corrosive
environments, and deployable at short notice (which makes it particularly favorable
for military communications systems). Also, fiber transmission is immune to
electromagnetic interference and does not cause interference. Last, fiber is made from
one of the cheapest and most readily available substances on earth, sand. This makes
fiber environmentally sound; and unlike copper, its use will not deplete natural
resources.
Thus, the general fiber characteristics can be summarized as follows:
1.
2.
3.
4.
5.
6.
7.
huge bandwidth (nearly 50 terabits per second (Tbps)
low signal attenuation (as low as 0.2 dB/km)
low signal distortion (immune to electromagnetic interference)
low power requirement
low material usage
small space requirement, and
low cost.
For all the above qualities, the optical fiber networks best fits to be the
solution for the high-speed networks. In the same time, it raises the challenge of the
design of such networks and the optimizations problems to effectively benefit from its
resources.
2
1.2. Multiplexing techniques:
As previously mentioned, a single fiber has a potential bandwidth of nearly 50
Tbps, on the other hand the maximum rate at which an end user – which can be a
workstation or a gateway that interfaces with lower-speed subnetworks - can access
the network is limited by electronic speed (to a few Gbps). This raises the issue of
optimal optical communication network design that saves the network cost, and
improves its performance by efficiently using the fiber's huge bandwidth and
introducing concurrency among multiple user transmissions.
In optical networks, this concurrency may be provided by different
multiplexing techniques [5] :
Space-division multiplexing (SDM):
partitions the physical space to increase transport bandwidth, e.g., bundling a set
of fibers into a single cable, or using several cables within a network link. It is
also referred to as "multi-fiber" case in literature. Also, it is usually combined
with any of the other multiplexing techniques.
Frequency/Wavelength-division multiplexing (FDM/WDM):
partitions the available frequency spectrum into a set of independent channels.
The use of FDM within an optical network is termed (dense) wavelength-division
multiplexing (DWDM or WDM) which enables a given fiber to carry traffic on
many distinct wavelengths.
Time-division multiplexing (TDM):
divides the bandwidth’s time domain into repeated time-slots of fixed length.
Using TDM, multiple signals can share a given wavelength if they are nonoverlapping in time.
Code-division multiplexing (CDM):
divides the available channels (frequency, time, spatial) by assigning a different
orthogonal code to each connection.
Optical TDM and CDM are somewhat futuristic technologies [1] . The optical
TDM bit rate is the aggregate rate over all TDM channels in the system, while the
optical CDM chip rate may be much higher than each user's data rate. As a result,
both the TDM bit rate and the CDM chip rate may be much higher than electronic
processing speed, i.e., some part of the end user's network interface must operate at a
rate higher than electronic speed. Thus, TDM and CDM are relatively less attractive
than WDM, since WDM – unlike TDM or CDM- has no such requirement.
Specifically, WDM is the current favorite multiplexing technology for the
optical communication networks since all the end-user equipment needs to operate
only at the bit rate of a WDM channel, which can be chosen arbitrarily, e.g., peak
electronic processing speed. Hence our main focus will be based on WDM routed
network or simply WRON's.
3
1.3. Optical WDM networks:
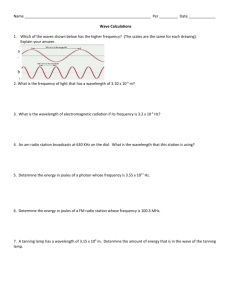
To take full advantage of the potential of fiber, the use of wavelength division
multiplexing (WDM) technology has become the option of choice. With WDM, a
number of distinct wavelengths are used to implement separate channels. An optical
fiber can carry several channels in parallel, each on a particular wavelength (see
below Figure 2).
Fiber
Tx
Rx
Tx
Rx
Tx
Rx
Figure 2: fiber section illustrating different connections carried on different wavelengths
The number of wavelengths that each fiber can carry simultaneously is limited
by the physical characteristics of the fiber and the state of the optical technology used
to combine these wavelengths onto the fiber and isolate them off the fiber. With
currently available commercial technology, a few tens of wavelengths can be
supported within the low-loss window at 1550 nm (see Figure 1), but this number is
expected to grow rapidly in the next few years. Therefore, optical fiber links
employing WDM technology have the potential of delivering an aggregate throughput
in the order of Terabits per second, enough to satisfy the ever-growing demand for
more bandwidth per user on a sustained, long-term basis.[6]
Unfortunately, due to the mismatch between aggregate fiber capacity and peak
electronic processing speeds, simply upgrading existing point-to-point fiber links to
WDM creates the well-known electro-optic bottleneck [2]: rather than achieving the
multiterabit-per-second throughput of the fiber, one has to settle for the multigigabitper-second throughput that can be expected of the electronic devices where the optical
signals terminate. Overcoming the electro-optic bottleneck, therefore, involves the
design of properly structured architectures to interconnect the fiber links.
An optical WDM Routed network (WRON) is a network with optical fiber
transmission links and with an architecture that is designed to exploit the unique
features of fibers and WDM. Such networks offer the promise of an all-optical
information highway capable of supporting a wide range of applications that involve
the transport of massive amounts of data and/or require very fast response times. Such
applications include video on demand and teleconferencing, telemedicine
applications, multimedia document distribution, remote supercomputer visualization,
and many more to come. Consequently, optical WDM networks have been a subject
of extensive research both theoretically and experimentally.
The architecture for wide-area WDM networks that is widely expected to form
the basis for a future all-optical infrastructure is built on the concept of wavelength
4
routing. A wavelength routing network, shown in Figure 3, consists of two types of
nodes:
Optical Cross-Connects (OXCs): which connect the fibers in the network, and
Edge nodes: which provide the interface between non-optical end systems
(such as IP routers, ATM switches, or supercomputers) and the optical core.
Access nodes provide the terminating points (sources and destinations) for the
optical signal paths. Each node (at its access station) is equipped with a set of
transmitters and receivers, both of which may be wavelength tunable.
It should be noted that the communication paths may continue outside the optical part
of the network in electrical form.
Figure 3: A wavelength routed WDM network
The services that a wavelength routed network offers to end systems attached
to edge nodes are in the form of logical connections implemented using lightpaths
[27]. A lightpath is the basic mechanism of communication in a wavelength-routed
network. Each lightpath (also referred to as -channel), is a clear optical path –
alternatively referred to as an all-optical communication channel -between two edge
nodes, it bypasses electronic packet processing at intermediate nodes and is realized
by finding a physical path and allocating a free wavelength on each link of that path.
The end-nodes of the lightpath have access to it via transmitters and receivers that are
tuned to the wavelength on which the lightpath operates.
Examples of lightpaths are shown in Figure 3 as red and green directed lines.
Information transmitted on a lightpath does not undergo any conversion to and
from electrical form within the optical network, and thus, the architecture of the
optical network nodes can be very simple because they do not need to do any signal
processing. Furthermore, since a lightpath behaves as a literally transparent "clear
channel" between the source and destination edge node, there is nothing in the signal
path to limit the throughput of the fibers.
The OXCs provide the switching and routing functions for supporting the
logical connections between edge nodes. An OXC takes in an optical signal at each of
the wavelengths at an input port, and can switch it to a particular output port,
5
independent of the other wavelengths. An OXC with N input and N output ports
capable of handling W wavelengths per port can be thought of as W independent N x
N switches. These switches have to be preceded by a wavelength demultiplexer and
followed by a wavelength multiplexer to implement an OXC, as shown in Figure 4.
Figure 4: A 3x3 optical cross-connect (OXC) with two wavelengths per fiber
Thus, an OXC can cross-connect the different wavelengths from the input to
the output, where the connection pattern of each wavelength is independent of the
others. By appropriately configuring the OXCs along the physical path, a logical
connection (lightpath) may be established between any pair of edge nodes [26] . This
can be illustrated though the following WDM OXC shown as a routing block (see Figure 5).
Figure 5: An NxN WDM optical Cross-connect with k-wavelengths
1.4. RWA problem:
The Wavelength routed networks presented here above, raise a challenging
network design problem. To illustrate this design problem, let us consider an N-node
network, if each node is equipped with N-1 transceivers [transmitters (lasers) and
receivers (filters)] and if there are enough wavelengths on all fiber links, then every
node pair could be connected by an all-optical lightpath, and there is no networking
problem to solve. However, it should be noted that the network size (N) should be
scalable, transceivers are expensive so that each node may be equipped with only a
few of them, and technological constraints dictate that the number of WDM channels
that can be supported in a fiber be limited to W (whose value is a few tens today, but
6
is expected to improve with time and technological breakthroughs). Thus, only a
limited number of lightpaths may be set up on the network [1] .
Under such a network setting, a challenging networking problem is that, given
a set of lightpaths that need to be established on the network, and given a constraint
on the number of wavelengths, determine the routes over which these lightpaths
should be set up and also determine the wavelengths that should be assigned to these
lightpaths so that the maximum number of lightpaths may be established or
alternatively minimize the total number of wavelengths used to establish all the given
lightpaths.
While shortest-path routes may be most preferable, note that this choice may
have to be sometimes sacrificed, in order to allow more lightpaths to be set up. Thus,
one may allow several alternate routes for lightpaths to be established. Lightpaths that
cannot be set up due to constraints on routes and wavelengths are said to be blocked,
so the corresponding network optimization problem is to minimize this blocking
probability or to reduce the total network cost respectively.
An example of such network with assigned lightpaths between different endnodes is illustrated in the figure below (Figure 6 ). [7]
Figure 6: An example of WRON with 4 lightpaths using 2 wavelengths
A unique feature of optical WDM networks is the tight coupling between
routing and wavelength selection. As can be seen in Figure 6, a lightpath is
implemented by selecting a path of physical links between the source and destination
edge nodes, and reserving a particular wavelength on each of these links for the
lightpath. Thus, in establishing an optical connection we must deal with both routing
(selecting a suitable path) and wavelength assignment (allocating an available
wavelength for the connection). The resulting problem is referred to as the Routing
and Wavelength Assignment (RWA) problem [7] , and is significantly more difficult
than the routing problem in electronic networks.
7
The additional complexity arises from the fact that routing and wavelength
assignments are subject to the following two constraints:
1. Wavelength continuity constraint:
A lightpath must use the same wavelength on all the links along its path from
source to destination edge node. This constraint is illustrated in Figure 6 by
representing each lightpath (using a certain wavelength) with a certain style along
all the links in its path. In other words, the same lightpath is drawn with a
continuous style (either dotted or solid) along all the links in its path
2. Distinct wavelength constraint:
All lightpaths using the same link (fiber) must be allocated distinct wavelengths.
In Figure 6 this constraint is illustrated by the fact that any 2 lightpaths sharing
any link are drawn with different styles (assigned different wavelengths).in other
words, the lightpaths with the same drawing style never share the same link.
The effect of the wavelength continuity constraint can be represented by
replicating the network into as many copies as the number of wavelengths. For
example, such a concept is illustrated in Figure 7 where the RWA problem is assumed
to have two wavelengths. If wavelength i is selected for a lightpath, the source and
destination edge node communicate over the i-th copy of the network. Thus, finding a
path for a connection may potentially involve solving W routing problems for a
network with W wavelengths, one for each copy of the network.
Figure 7: conceptual RWA problem with two wavelengths per fiber
1.4.1. Wavelength conversion:
The wavelength continuity constraint may be relaxed if the optical cross
connects (OXCs) are equipped with wavelength converters [8] . A wavelength
converter is a single input/output device that converts the wavelength of an optical
signal arriving at its input port to a different wavelength as the signal departs from its
output port, but otherwise leaves the optical signal unchanged.[6]
8
In OXCs without a wavelength conversion capability, an incoming signal at
port Pi on wavelength can be optically switched to any port Pj, but must leave the
OXC on the same wavelength . With wavelength converters, this signal could be
optically switched to any port pj on some other wavelength '. That is, wavelength
conversion allows a lightpath to use different wavelengths along different physical
links.
The wavelength-continuity constraint distinguishes the wavelength-continuous
network from a circuit-switched network which blocks calls only when there is no
capacity along any of the links in the path assigned to the call. To further illustrate
this point, consider the portion of the network in Figure 8, two lightpaths have been
established in the network: 1) between node 1 and node 2 on wavelength 1 and 2)
between node 2 and node 3 on wavelength 2. Now, suppose a lightpath between node
1 and node 3 must be set up. If there are only two wavelengths available in the
network, establishing such a lightpath from node 1 to node 3 is now impossible even
though there is a free wavelength on each of the links along the path from node 1 to
node 3. This is because the available wavelengths on the two links are different. Thus,
a wavelength-continuous network may suffer from higher blocking as compared to a
circuit-switched network.[8]
Figure 8: Wavelength-continuity constraint in a WRON, (a) without converter, (b) with converter
Different levels of wavelength conversion capability are possible. Figure 9
illustrates the differences for a single input and single output port situation; the case
for multiple ports is more complicated but similar.
9
Figure 9: Wavelength conversion
The different cases are:
Full wavelength conversion capability implies that any input wavelength may be
converted to any other wavelength.
Limited wavelength conversion capability denotes that each input wavelength
may be converted to any of a specific set of wavelengths, which is not the set of
all wavelengths for at least one input wavelength.
Fixed wavelength conversion capability forms a special case of the limited
wavelength conversion case, where each input wavelength can be converted to
exactly one other wavelength.
As a matter of fact, if each wavelength is "converted" only to itself, then we
have no conversion.
The advantage of full wavelength conversion is that it removes the wavelength
continuity constraint, making it possible to establish a lightpath as long as each link
along the path from source to destination has a free wavelength (which could be
different for different links). As a result, the RWA problem reduces to the classical
routing problem that is, finding a suitable path for each connection in the network.
Referring to Figure 7, full wavelength conversion collapses the W copies of the
network into a single copy on which the routing problem is solved.
On the other hand, with limited conversion, the RWA problem becomes more
complex than with no conversion. To see why, note that employing limited
conversion at the OXCs introduces links between some of the network copies of
Figure 7. For example, if wavelength 1 can be converted to wavelength 2 but not to
wavelength 3, then links must be introduced from each OXC in copy 1 of the
network to the corresponding OXC in copy 2, but not to the corresponding OXC in
copy 3. When selecting a path for the connection, at each OXC there is the option of
remaining at the same network copy or moving to another one, depending on the
conversion capability of the OXC. Since the number of alternatives increases
exponentially with the number of OXCs that need to be traversed, the complexity of
the RWA problem increases accordingly.
10
In general, wavelength conversion (full or limited) increases the routing
choices for a given lightpath (i.e., makes more efficient use of wavelengths), resulting
in better performance. Since converter devices increase network cost, a possible
middle ground is to use sparse conversion, that is, to employ converters in some, but
not all, OXCs in the network. In this case, a lightpath must use the same wavelength
along each link in a segment of its path between OXCs equipped with converters, but
it may use a different wavelength along the links of another such segment. It has been
shown that by implementing full conversion at a relatively small fraction of the OXCs
in the network is sufficient to achieve almost all the benefits of conversion [9]
To summarize, the figure below (Figure 10) gives a sample WDM routed
network with 4 requests and a wavelength-converting capable node. The requests
from node 1 to node 4 and one connection request from node 2 to node 4 can use the
same wavelength for their lightpaths as they don't share any links. The 2nd request
from node 2 to node 4 must use a different wavelength for its lightpath, as the 1 has
been already used. The last connection request from node 2 to node 5 has been
assigned a lightpath passing over node 1. Since the wavelength 1 has been already
used over the fiber from node 1 to node 5, it should use another wavelength 2, but
due to the existence of a wavelength converter in node 1, it could use wavelength 1
one the fiber from node 2 to 1 and to be converted to 2 from node 1 to 5.
Wavelength Converter
1
2
1
2
1
2
3
4
1
5
Figure 10: A WRON with 4 requests and a wavelength converter
1.5.
Multicasting:
In the previous sections we presented the concept of lightpath as the basic
mechanism of communication in a wavelength-routed network. In [22] , the concept
of a lightpath was generalized into that of a light-tree, which, like a lightpath, is a
clear channel originating at given source node and implemented with a single
wavelength. But unlike a lightpath, a light-tree has multiple destination nodes; hence
it is a point-to-multipoint channel. The physical links implementing a light-tree form a
tree rooted at the source node, rather than a path in the physical topology, hence the
name.
11
The study in [22] focused on the RWA problem for static traffic (traffic based
on connection requests known in advance, the different types of traffic will be
discussed in the next chapter in details). It was demonstrated that by extending the
lightpath concept to a light-tree, the network performance (in terms of average packet
hops) can be improved while the network cost (in terms of the number of optical
transmitters / receivers required) decreases.
Light-trees are implemented by employing optical devices known as power
splitters at the OXCs [4] . The figure below (Figure 11) shows a power splitter and a
combiner.
Figure 11: (a) power splitter, (b) combiner
A power splitter has the ability to split an incoming signal, arriving at some
wavelength , into up to m outgoing signals, m >= 2; m is referred to as the fan-out of
the power splitter. Each of these m signals is then independently switched to a
different output port of the OXC. Note that due to the splitting operation and
associated losses, the optical signals resulting from the splitting of the original
incoming signal must be amplified before leaving the OXC. Also, to ensure the
quality of each outgoing signal, the fan-out m of the power splitter may have to be
limited to a small number.
If the OXC is also capable of wavelength conversion, each of the m outgoing
signal may be shifted, independently of the others, to a wavelength different than the
incoming wavelength . Otherwise, all m outgoing signals must be on the same
wavelength .
The main feature of light-trees is the inherent capability for performing
multicasting in the optical domain (as opposed to performing multicasting at a higher
layer, e.g., the network layer, which requires electro-optic conversion). Such
wavelength routed light-trees are useful for transporting high-bandwidth, real-time
applications such as high-definition TV (HDTV). Therefore, OXCs equipped with
power splitters will be referred to as multicast capable OXCs (MC-OXCs). Note that,
just like with converter devices, incorporating power splitters within an OXC is
expected to increase the network cost because of the large amount of power
amplification and the difficulty of fabrication.
With the availability of MC-OXCs and the existence of multicast traffic
demands, the problem of establishing light-trees to satisfy these demands arises. We
will call this problem the multicast routing and wavelength assignment (MC-RWA)
problem. MC-RWA bears many similarities to the RWA problem discussed in section
1.4 above. Specifically, the tight coupling between routing and wavelength
assignment remains, and even becomes stronger: in the absence of wavelength
12
conversion the same wavelength must be used by the multicast connection not just
along the links of a single path but along the links of the whole light-tree. Since the
construction of optimal trees for routing multicast connections is by itself a hard
problem, the combined MC-RWA problem becomes even harder.
As we already know, optimal solutions for the point-to-point RWA problems
are not practically obtainable, and with a more general construct (the light-tree) and
hence a much larger search space, this is going to be even more true for the MC-RWA
problems.
The benefits of multicasting in wavelength routed optical networks were first
demonstrated in [32] . These benefits as proved in the reference paper can be
summarized in the following points:
Using light-trees (spanning the source and destination nodes) rather than
individual parallel lightpaths (each connecting the source to an individual
destination) requires fewer wavelengths and consumes a significantly lower
amount of bandwidth.
Using light-trees increase the logical connectivity of the network by employing
more receivers than transmitters, and in the same time the hop distance is
decreased.
Light-trees not only can provide improved performance for unicast traffic, but
naturally better support multicast traffic and broadcast traffic because of their
inherent point-to-multipoint nature.
Moreover, optical multicasting (which is used to implement a light-tree) has some
improved characteristics over electronic multicasting since “splitting light” is
conceptually easier than copying a packet in electronic buffer.
1.6.
Thesis Organization (incomplete):
13
Chapter 2
2. Survey of literature
This chapter is dedicated to the discussion of the previous work in our research
area. It should be noted that the optical network design is a very rich and dynamic
research area that leads to many research points for different cases or under varying
assumptions.
2.1. Technical Classification for RWA:
To start with, we will first present a technical classification of the RWA problem
under consideration and then discuss the different contributions. The classification is
based on different aspects of the problem under consideration:
1. Traffic type:
The traffic type determines different class of problems, which can be either [7] :
1. Static:
Where the entire set of traffic connections is well known in advance and will
not change (at least for the current configuration time). The problem is then to
set up lightpaths fro these connections in a global fashion.
2. Incremental:
In this case, connection requests arrive sequentially, a lightpath is established
for each connection, and the lightpath remains in the network indefinitely.
3. Dynamic
In opposition to the previous case, a lightpath is set up for each connection
request as it arrives, and then is released when after some finite amount of
time.
The RWA problem for static traffic is known as Static Lightpath Establishment (SLE)
problem or Static-RWA problem. The RWA problem for both incremental and
dynamic cases is known as Dynamic Lightpath Establishment (DLE) problem or
Dynamic-RWA problem. As the dynamic traffic case is based on stochastic models
and leads to dynamic programming methods [6] , it is considered out of the scope of
the current work and shall be considered for future work.
2. Wavelength-conversion capability:
As discussed in the previous chapter, there are different levels of wavelength
conversion capabilities. The full wavelength conversion case reduces the RWA
problem to classical routing problem and thus has been less attractive to research.
Some research work focused on the case of no wavelength conversion capability and
others studies the case of limited conversion and a limited number of wavelength
conversion capable optical switches. Wavelength capability in the networks (rather
than on each switch as explained in the previous chapter) can be considered in
different levels:
Full-wavelength conversion
Sparse wavelength conversion
No wavelength conversion
According to whether all the network, only a limited subset of the nodes, or none of
the node are equipped with wavelength converters, respectively
14
3. Objective function:
The main two objective functions used in literature are: minimizing the number of
used wavelengths to establish a given set of connection requests, referred to as MinRWA problem. Or, alternatively, maximizing the number of established connection
requests for a given number of wavelengths
4. Fiber multiplicity:
Studies have differentiated between the case where each physical link is composed of
a single fiber link or multiple ones. The interest in multi-fiber networks is motivated
by the economic advantage of installing bundles of fiber on network links for the
purpose of future grows [10] .
5. Requests multiplicity:
Some research work, assumed only a single connection request between any Sourcedestination (S-D) pair, while other studied the more general case where the same S-D
air can request multiple connections.
6. formulation structure:
The mathematical modeling of different formulations may approach the problem from
different views, one such aspect is the significance of the variables used in the
modeling. The major two classes are the use of variable to reflect link flows (referred
to as link-flow based formulation), or variables that reflect path flows (referred to as
path-flow based formulation). The advantage of using a link-flow based formulation
over a path-flow based formulation is that the former has fewer variables. In fact, the
number of links grows quadratically with the number of nodes in the network,
whereas the number of paths may grow exponentially with the number of nodes [10] .
In this study, we survey the different formulation, and solution approaches for
the static traffic RWA problem (or SLE problem), for the general Mesh topology case
while varying the rest of assumptions of the problems (wavelength conversion
capability, fiber multiplicity, requests multiplicity, and objective function).
2.2. Functional Classification for static RWA:
A special study has focused on the static RWA problem's different algorithms
and solution approaches [11] . It provided a novel classification based on the
functional aspects of each algorithm. Based on this classification different
comparisons has been carried out to highlight the different challenges and trade-offs
or advantages and disadvantages of each category.
Generally, the RWA problem is partitioned into two sub-problems; routing
sub-problem and wavelength assignment sub-problem. The authors further divide
each sub-problem into two components (1) search and (2) selection functions. Figure
12 gives example algorithms for solving each functional element described in the
routing and wavelength assignment problems, respectively.
15
Routing and Wavelength
Assignment
Routing Problem
Search
Sequential
Selection
Wavelength Assignment
problem
Search
Combinatorial
Selection
Sequential
Combinatorial
Figure 12: functional classification of Routing & Wavelength Assignment algorithms.
We will further discuss the different functional elements of each problem
algorithms.
2.2.1. Functional elements of routing algorithms:
The search space for the routing problem exponentially increases with the
number of network nodes and links. Thus, it is impractical to take into account all the
possible source destination pairs. For this reason, the routing functionality is usually
divided into two components; search and selection.
1.
Search function:
The search function is usually performed by well-known techniques as shortestpath (SP) algorithm and its variations. The different search functions are:
Shortest Path (SP): Shortest Path algorithms find the shortest route from a given
source to a destination in a graph. The route is a path whose cost is less than any
other route from the source to the destination. The cost function is most
commonly the number of hops in the path. The shortest path algorithm generates
one route and it is independent of other selections.
K-shortest Path (K-SP): K-shortest path algorithms find more than one (of number
that equals k, hence the naming) route for each source-destination pair. Those K
alternative paths provide the flexibility in route selection [25] . However, the
routing problem is transformed into a selection problem, where routes are selected
to satisfy the required objective function of the model.
2. Selection function:
The selection function varies from the following:
Sequential selection: this technique is considered to be the simplest method.
Usually a greedy algorithm is employed. The main disadvantage of such
techniques is not guaranteeing the optimality of the solution, since the selection is
made in sequence and individually. Such algorithms algorithm depends on two
16
main sub-components, namely; selection order and selection rule.
The selection order is the selection sequence of lightpaths to be routed (or to be
assigned) and the selection rule is a decision criterion to choose one of the
available candidates.
Combinatorial selection: this selection technique is considered to be more
complex than the previous alternative. In the same time the main advantage of it is
that it considers the inter-dependency of lightpath routing that sequential
approaches can not take into consideration (but approximated by an appropriate
ordering scheme).
For an optimal solution, a Mixed Integer Linear Program (MILP) can be used.
This technique is the most complex in terms of computational complexity.
For a heuristic solution, a random algorithm may be used. In this approach,
routing algorithm is repeatedly performed for different set of routes and the
objective function is satisfied by the appropriate choice of the set of routes at each
step.
2.2.2. Functional elements of Wavelength Assignment algorithms:
Again, the Wavelength assignment problem can also be defined in terms of
search and selection functions.
1.
Search function:
The search function simple since any available wavelength can be assigned along
the selected route.
2. Selection function:
This problem is concerned with selecting a certain wavelength among the
available wavelength in such a way to achieve the minimum used number of
wavelength or in other words, maximize the wavelength utilization. Selection is
further classified into sequential and combinatorial approaches as for the routing
case. It should be noted that the wavelength assignment problem is mapped to a
graph-coloring problem and is known to be NP-complete. [1] , [12]
Sequential selection: As previously, this technique is less complex than the
combinatorial case. In the same time optimality is not guaranteed as the interdependencies between the selections is not considered.
Combinatorial selection: This selection technique is considered to be more
complex than the previous alternative. Again, the main advantage of it is that it
considers the inter-dependency of lightpath assignment that sequential approaches
can not take into consideration (but approximated by an appropriate ordering
scheme).
There are different algorithms for heuristic solutions. Many are special purpose
algorithms specialized for this problem.[12]
2.3. General Notations:
In this section, we will introduce the notations that will be used throughout this
chapter to form a common base for discussion and comparison between the different
approaches. We will model the network as a graph G(V,E) with vertex set V and
nodes or edges E :
o N: denotes the number of nodes in the network, N=|V|.
17
o L: denotes the number of links in the network, L=|E|.
o L': denotes the number of links in the network that are used in the pre-selected
candidate paths
o W: denotes the number of wavelengths in each of the network links.
o R: denotes the number of source-destination SD pairs.
o P': denotes the number of candidate paths for each connection request.
o P: denotes the total number of paths calculated in the network, which is equal
to P'*R.
2.4. Different Approaches for static RWA:
In this section we will present different solution approaches for the static
RWA problem. The different solution approaches will be referred to according to
their objective function, formulation, and fiber and requests multiplicity. The
functional specification of each approach will be discussed in details for each
approach.
2.4.1. Min-RWA, link-based, no conversion, unique requests, single fiber:
This approach first appeared in [13] and published by one of the authors in his
book [1] , and was referred to in the review paper [7] . This approach depends on
decomposing the RWA problem into 2 sub-problems, namely:
1. Routing sub-problem: where the objective is to find paths (lightpaths) to satisfy
the given connection requests
2. Wavelength assignment sub-problem: where the objective is the assign each of the
lightpaths a different wavelengths respecting the wavelength continuity constraint.
Each of these 2 sub-problems is itself an NP-Complete problem. In this approach,
they are solved separately and in sequence.
1. Routing sub-problem:
The routing sub-problem is solved by formulating it as a mixed-integer linear
program MILP model based on the similarity with a well-known problem of Multicommodity network flow problem (MCNF) [29].
Let us first present the Routing sub-problem formulation with the discussion of its
constraints and then discuss the solution approach. As, referred to in the title of this
approach the model has the following characteristics and assumptions:
Min-RWA
Link-based model
No wavelength conversion
Unique Requests
Single-fiber links
Wavelength continuity constraint is not explicit in this model since it is considered
in the Wavelength assignment sub-problem.
The formulation is as follows:
Objective Function:
Minimize
Such that
F
F F
sd
max
(1.1)
max
ij
i, j
(1.2)
s ,d
18
Flow conservation constraints:
sd
sd
F ij F jk
i
k
m
m
sd
sd
0
if s=j
(1.3)
if d=j
otherwise
Integrality constraints:
m
F
sd
sd
ij
= 0,1
(1.4)
= 0,1
(1.5)
Where
msd denote the traffic (in terms of a lightpath) from any source s to any destination d.
(the authors consider at most one lightpath from any source to any destination;
hence msd =1 if there is a lightpath between s to d msd =0 otherwise.)
F
sd
jk
denote the flow variables (in terms of lightpaths) that is flowing from source s to
destination d on link ij.
In the above model, equation (1.1) simply states the objective is to minimize
the introduced Fmax variable. This variable is constraints by equation (1.2) to be
larger than the sum of flows between all the SD pairs on any link. The main
constraints of the model in (1.3) formulate the "flow balance" or "flow conservation"
equations; the sum of the outgoing flows subtracted from the sum of all incoming
flows in any node equals the traffic consumed in the node. The traffic consumed may
be either positive if the node is the source, negative if it is a sink node, or zero it is
neither source nor sink of that connection. These flow balance equations are repeated
for every connection request (SD pair).
Since the traffic demands msd between any SD pair are inputs to the models,
equation (1.4) simply states that they can only be given in 0/1 format. On the other
hand, equation (1.5) constrains the model's flow variables to only integer 0/1
quantities.
The general form of the MILP can easily overwhelm the capabilities of
today’s computing facilities, even for moderate-sized networks. This is mainly
because of the large number of variables and constraints in the model and due to the
integrality constraints in the model.
A solution technique has been provided to overcome the above two problems.
First, to reduce the number of variables in the model, only the non-zero connection
requests ( msd ) will be considered. This can eliminate all of the equations (1.4). Also,
this approach will reduce the number of variables in the constraints of equation (1.3).
Further reduction of the number of variables was achieved by assuming that a
particular lightpath will not pass through all the ij links. By determining the links
which have a good probability of being in the path through which a lightpath may
sd
pass, only those links with corresponding F jk variables for that particular SD pair
are considered.
19
Second, to overcome the problem of extensive computations due to the
integrality constraints, a new technique called "randomized rounding" technique [14] ,
has been developed. As part of this technique, the integrality constraints have been
relaxed, and thus eliminating all instances of equation (1.5). After solving the
proposed relaxed LP model (using a general-purpose LP solver [15] ) the technique
then proceeds by "stripping" paths that has been selected by the MILP solver. This is
accomplished by extracting and converting the fractional flows provided by the LP
solution to integer flows forming a set of alternate paths for each request. Each one of
those alternate paths may be used to route the connection. A single path is then
randomly chosen for each connection. It should be noted that using this technique the
search space of the routing sub-problem has been reduced using the fractional values
of the flow variables obtained by the solver.
2. Wavelength assignment sub-problem:
Once a path has been chosen for each lightpath, the number of lightpaths
traversing any physical fiber link defines the congestion on that link. Now, it is
needed to assign wavelengths to each lightpath such that any two lightpaths that pass
through the same physical link are assigned different wavelengths.
This Wavelength assignment sub-problem is solved by reformulating the
wavelength assignment problem as a "Graph coloring" problem and solving it using
graph coloring algorithms. Assigning wavelength to lightpaths, so as to minimize the
number of wavelengths under the wavelength-continuity constraint is be reduced to
graph coloring problem, which can be shown in the following steps:
1. Construct an auxiliary graph G' (V', E'), so that each lightpath in the system is
represented by a node in graph G. There is an undirected edge between two nodes
in graph G' if the corresponding lightpaths pass through a common physical fiber
link.
2. Color the nodes of the graph G' such that no two adjacent nodes have the same
color.
This formulation of the wavelength assignment problem is best represented by
the following two figures. First, Figure 13 shows a WRON with eight connection
requested that has been assigned eight lightpaths after solving the routing subproblem.
20
Figure 13: An optical network with eight routed lighptahs
Second, Figure 14 shows the auxiliary graph constructed as part of the
wavelength assignment sub-problem solution.
Figure 14: Auxiliary graph for the Wavelength-assignment sub-problem
This problem can be solved using efficient sequential graph coloring
algorithms. The "smallest-last" coloring algorithm [12] was employed in this
approach. The algorithm depends on ordering the vertices to be colored according to
the descending order of their degrees and try to color them in sequence to minimize
the total number of colors used.
2.4.2. Min-RWA, link-based, no conversion, multiple requests, single fiber:
This approach is a generalization of the previous one, where each SD pair
can request more than a single connection request [7] . Again, the RWA problem
is decomposed into 2 sub-problems Routing, and Wavelength Assignment
respectively.
1. Routing sub-problem:
The routing sub-problem in this approach follows the same formulation as the
previous one, with little change to accommodate the case of multiple connection
requests between the same SD pair.
As, referred to in the title of this approach the model has the following
characteristics and assumptions, which are mostly inherited from the previous
approach:
Min-RWA.
Link-based model.
No wavelength conversion.
Multiple Requests
21
Single-fiber links
Wavelength continuity constraint is not explicit in this model since it is
considered in the Wavelength assignment sub-problem.
The formulation is as follows:
Objective Function:
Minimize
F
Such that
max
F
(2.1)
max
F
sdw
ij
i, j
(2.2)
if s=j
(2.3)
s ,d , w
Flow conservation constraints:
F
sdw
ij
i
F jk
m
m
sdw
k
sdw
if d=j
otherwise
sdw
0
Traffic demand constraints:
m
sdw
w
m sd
s, d
(2.4)
Capacity constraints:
F
sdw
ij
1
i , j , w
(2.5)
s ,d
Integrality constraints:
F
sdw
ij
i, j
= 0, 1
(2.6)
where
msdw denote the traffic (in terms connection requests) from any source s to
any destination d on any wavelength w.(assuming that two or more lightpaths
may be set up between the same source-destination pair, if necessary, but each of
them must employ a distinct wavelength; hence msdw =0,1 )
m
F
sd
sd
jk
denote the number of connections needed between source s and destination d.
denote the flow variables (in terms of lightpaths) that is flowing from source s to
destination d on link ij and wavelength w.
F
sdw
ij
1 since a wavelength on a link
can be assigned to only one path ( wavelength-capacity constraint)
In the above model, equation (2.1) simply states the objective is to minimize
the introduced Fmax variable. This variable is constrainted by equation (2.2) to be
larger than the sum of flows over all wavelengths over all connections on any link ij.
The flow balance constraints of the model in (2.3) ensures that the sum of the
outgoing flows subtracted from the sum of all incoming flows in any node equals the
traffic consumed in the node. The traffic consumed may be either positive if the node
is the source, negative if it is a sink node, or zero if it is neither source nor sink of that
connection. These flow balance equations are repeated for every connection request
(SD pair) and for every available wavelength W.
Equation (2.4), forms the traffic demand constraints, which ensures that
different lightpaths (with different wavelengths) has been established to satisfy the
number of connection requests between the SD pair; msd .
22
The capacity constraints in equation (2.5), states that the same wavelength can
only be assigned once to any lighpath between any SD pair on the same link ij.
Furthermore, equation (2.6) constrains the model's flow variables to only integer
0/1 quantities.
From the above presented formulation and the discussion on the previous
model, it is easily concluded that this model has a larger number of variables and
constraints. It might not be suitable to use the same developed techniques for the
previous approach to solve this problem in hand.
2. Wavelength assignment sub-problem:
Independently from the routing problem, once each connection requests
(irrelatively if it was for the same SD pair or not) has been assigned a lightpath, the
wavelength assignment problem can still be solved in the same method as in the
previous approach.
Note:
It should be noted that the assumption made in this approach, that multiple
connection requests between the same SD pair must use different wavelength is a
limitation on the problem itself. Furthermore this assumption is not necessary,
different connection requests between the same SD pair can be carried out by linkdisjoint paths (path that don't share any links) whenever possible and thus assigned
the same wavelength.
2.4.3. Min-RWA, link-based, full-wavelength conversion, unique requests,
single fiber:
This approach is a special version of the above two approaches where the
network is assumed to be composed of full-wavelength conversion capable nodes [7] .
As previously mentioned in Chapter 1, this case reduces the RWA problem to the
classical routing problem (in circuit-switched telephone networks). Thus the problem
is completely solved by solving the routing sub-problem, and the wavelength
assignment sub-problem is not an issue. In other words, once lightpaths has been
established for each connection requests, any wavelength available on any link may
be used. Note that a single lightpath in such a wavelength-convertible network can
possibly use different wavelengths along each of the links in its path.
Furthermore, the routing problem is formulated using the same ILP model and
constrains as the 1st presented approach. Thus, we will not repeat them in this section.
This approach as a variation of the above approaches still inherits most of its
characteristics and assumptions:
Min-RWA.
Link-based model.
Full-wavelength conversion
Unique Requests;
Single-fiber links
The wavelength continuity constraints are eliminated
Note:
23
This problem is not of much commercial importance, since in most cases full
wavelength conversion in the network is not preferred and may not even be necessary
due to high costs and limited performance gains.
2.4.4. Max-RWA, path-based, no conversion, multiple requests, single-fiber:
This approach was first published in [17]. This approach handles the problem
in a different method than the previously presented approaches. If we consider the
same decomposing of the RWA problem into Routing and wavelength assignment
problems, the solution becomes:
1. Routing sub-problem:
In this formulation the routing problem itself is decomposed into:
The calculation of different paths for each connection request, and then
A selection for the optimal path for each one according to the imposed
constraints and the objective function.
Referring to the functional classification of static RWA problems (in section
2.2, and in [11] ), where the routing problem is subdivided into search and selection,
in this formulation the search component of the routing sub-problem is first calculated
by finding a set of alternative paths for each connection.
As will be formulated in the model, for each connection request between any
source s and destination d, a physical path p P is calculated. This concept is
illustrated in Figure 15 below. The figure shows a set of different SD pair connection
requests (the number of connection requests is R as conforming to our notation), and
for each request, a set of paths are calculated.
SD1
P(sd1)
SD2
P(sd2)
SDR
P(sdR)
Set of Precalculated paths
for SD1
Set of Precalculated paths
for SD2
Set of Precalculated paths
for SDR
The selection of paths for the
requests is part of the ILP
Figure 15: illustration of the search phase of Routing sub-problem
24
2. Wavelength assignment sub-problem:
Contradicting to the previous approaches, the selection component of the routing
problem along with the wavelength assignment is formulated as an ILP and is solved
for optimality. The solution of this ILP determines which paths of the candidate paths
for each request are used and a wavelength is assigned for each of them.
The basic characteristics of this approach as will be mapped to its ILP can be
given as follows, only different aspects will be commented:
Max-RWA
Path-based model
No wavelength conversion;
Multiple requests
Single-fiber links
Wavelength continuity constraint is implicitly guaranteed because wavelengths
are assigned to entire paths rather than to individual links.
The formulation is as follows:
R
Objective Function:
Maximize
m
i 1
(4.1)
i
Capacity constraint:
C B 1
Traffic demands:
m 1 C A
m T
T
(4.2)
WxL
T
(4.3)
W
i
i
i=1,….,R
Integrality constraints:
m 0 , integer
c 0 , integer
i
ij
i=1,….,R
(4.4)
i= 1,….,P, j=1,…..,W (4.5)
where
R: denote the number of source-destination (s-d) pairs.
L: denote the number of links.
W: denote the number of wavelengths per link
m = {mi}, i=1,2….,R : number of connections established for source-destination pair i
T: offered load (total number of connection requests to be routed).
ρ={ ρ i}; i=1,2,…,R: fraction of the load to be established for source-destination pair i
(thus, T = number of connections to be set up for source-destination pair i)
i
A={aij}: PxN (path- s-d pair incidence) matrix in which aij = 1 if path i is between
source-destination j, and aij =0 otherwise.
B={bij}: PxM (path-edge incidence) matrix in which bij = 1 if link j is on path i, and
bij =0 otherwise.
C={cij}: PxW (path-wavelength assignment) matrix in which cij = 1 if wavelength j is
assigned to path i, and cij =0 otherwise.
As previously, equation (4.1) states that the objective is to maximize the sum
of satisfied connections. The capacity constraints in (4.2) specify that a certain edge
25
can not accommodate more than one connection on the same wavelength. The traffic
demands constraints in (4.3) ensures that the sum of the assigned paths with their
respective wavelengths to a certain SD pair must be at least satisfy the requested
number of connections for it, m i . The 2nd equation of this constraint is there to
separate the variables
m
i
from the actual demanded number of connections
T
i
.
Since the number of connection requested for each SD pair is m i , which is an input
to the model, equation (4.4) simply states that they can only integers. On the other
hand, equation (4.5) constrains the model's assignment variables to only integer 0/1
quantities.
To further illustrate the model and the definition and relation between the
different matrices involved in it, the following diagram (see Figure 16) is presented.
The diagram is an extension of the previous one (Figure 15), the same components,
namely the set of traffic connections and their candidate paths as defined by the A
matrix are shown. Also, the relation between each candidate path and the set of link
sin the networks are shown and are defined by the B matrix in the model (note that
only one candidate path relation with links is drawn for simplicity).
SD1
P(sd1)
SD2
P(sd2)
B
Matrix
A
Matrix
SDR
Connection
requests
Capacity constraints
are applied for each
link, such that each
wavelength is used
at most once
P(sdR)
Candidate
paths
Links
Figure 16: illustration of model formulation of section 2.4.4
We should note that this formulation was presented for the purpose of
providing tight bounds on the solution of any RWA algorithms. Thus the above model
has not been implemented.
2.4.5. Max-RWA, path-based, no conversion, multiple requests, single-fiber(2):
This approach was published also in [17], as an alternative to the previous
formulation. Again, using the same decomposing of the RWA problem into Routing
26
and wavelength assignment problems:
1. Routing sub-problem:
It is repeated exactly as the same previous approach.
2. Wavelength assignment sub-problem:
As opposite to the previous the previous approach, the RWA sub-problem with the
optimal selection of candidate paths for connection requests is formulated based on
the concept of "Graph coloring" problems [12] . As discussed in the wavelength
assignment sub-problem of the 1st presented approach, an auxiliary G'(V', E') graph is
created, where each node corresponds to a lightpath and two nodes are adjacent if and
only if the corresponding two lightpaths share a common physical link. This means a
set of lightpaths can be assigned a common wavelength only if the corresponding
nodes in G' form and independent sets (set of nodes that are disconnected).
The basic characteristics of this approach as will be mapped to its ILP can be
given as follows, only different aspects will be commented:
Max-RWA;
Path-based model;
No wavelength conversion;
Multiple requests:
Single-fiber links
Wavelength continuity constraint is implicitly guaranteed because wavelengths
are assigned to entire paths rather than to individual links.
The formulation this time is somehow different than the previous one. Instead
of having the C matrix to indicate the assignment between paths and wavelengths, this
relation has been broker over two steps:
Let f ={fi} be the vector of path-flows variables, where fi denotes whether
the corresponding path carries a flow or not (0/1 indicator)
Let W = {wi} be the vector holding the indicator variables that determines if
wavelength i is used or not. The length of this vector is assumed to be the
maximal number of independent sets in the auxiliary graph G' and is denotes
"I"
D={dij}: PxI (path-independent set incidence) matrix, where,
Dij = 1, if path i, belongs to independent set j
0, otherwise
The formulation is as follows:
R
Objective Function:
Maximize
m
i 1
i
(5.1)
Such that:
L
Wavelength constraint:
w W
i
i 1
(5.2)
Traffic demand constraints:
m
f A
(5.3)
27
m T
f wD
i
i
i=1,….,R
T
(5.4)
Integrality constraints:
w 0,1
i
, integer
i=1,….,I
(5.5)
where
R,W, m , , P, A as previous problem
I: the number of maximal independent sets in G'.
W = {wi}, i=1,2….,L : variables to indicate whether or not that wavelength indexed I
is used or not. (whether an indepenedt set is assigned this wavelength or not).
D={dij}: PxI (path-independent set incidence) matrix in which dij = 1 if independent
set j contains path i, and dij =0 otherwise.
f ={fi} the vector of path-flows.
Same as the previous model the objective function in equation (5.1) has not
changed. On the other hand the wavelength constraint in equation (5.2) ensures that
the number of assigned wavelengths does not exceed the physical number of
wavelengths per fiber.
The traffic demands constraints in (5.3) ensure that a number of paths have
been selected to carry the traffic of connection requests. Again, the 2nd equation of
this constraint is there to separate the variables m i from the actual demanded number
of connections
T
i
.
The new constraint in equation (5.4) ensures that every path that has been
selected (assigned a flow) is assigned a wavelength.
The last constraint (5.5) only states that each wavelength must be fully used or not
used at all hence each
w is either 0/1.
i
To further illustrate the model and the definition and relation between the
different matrices involved in it, relative to the previous modeling, the following
diagram (see Figure 17) is presented.
The diagram is an extension of the previous one (Figure 16), the same
components, namely the set of traffic connections and their candidate paths as defined
by the A matrix are shown. Also, the relation between each candidate path and the set
of path-flow variables is indicated by the fact that only a group of the candidate paths
is selected to carry the traffic, then each flow variable is assigned an appropriate
wavelength through the D matrix.
28
SD1
P(sd1)
SD2
P(sd2)
f1
W1
W2
f2
A
Matrix
SDR
Connection
requests
f
Vector
P(sdR)
D
Matrix
fR
Set of path-flow
variables
Candidate
paths
Ww
Set of
wavelengths
Figure 17: illustration of the model of section 2.4.5.
Along with the previous model, this formulation was presented for the purpose
of providing tight bounds on the solution of any RWA algorithms. Thus the above
model has not been implemented.
2.4.6. Max-RWA, link-based, no conversion, multiple requests, single-fiber:
This approach was published in [18]. This approach is similar to the previous
ones but the main difference is that the model variables reflect link-flows rather than
path-flows.
The approach presented by the authors addresses the RWA problem from a
different angle, instead of decomposing the problem into two sub-problems; the
problem is formulated as a single ILP model. This model is close to the 1st approach
presented, with the difference that the model incorporates the Wavelength assignment
problem too.
Let us first present the main characteristics and assumptions of the model:
Max-RWA
Link-based model
No wavelength conversion
Multiple Requests
Single-fiber links
Wavelength continuity constraint is explicit in this model as the ILP addresses the
combined RWA problem.
The formulation is as follows:
Objective Function:
Maximize
F
s ,d
q
( s, d )
(6.1)
q
29
Such that:
Traffic demand constraints:
F
q
q
(s, d )F q(s, d ) {0,1}
( s, d ) m s , d
(6.2)
Wavelength continuity:
W 1
C
( k ,q )
k 0
( s, d ) F q ( s, d )
q( s, d )
(6.3)
q( s, d ), (i, j ), k
(6.4)
Physical Links:
C
( k ,q )
i, j
( s, d ) C
( k ,q )
( s, d )
Capacity continuity:
C
( k ,q )
i, j
( s, d ) 1
k (i, j )
(6.5)
q ( s ,d )
Flow conservation:
C
i
( k ,q )
i, j
(s, d ) P i , j C j ,i ( s, d ) P j ,i
( k ,q )
(6.6)
i
( k , q ) ( s, d )
C
( k ,q )
= C ( s, d )
0
if j=s
if j=d ; for all(s,d), k, q and j
if j s and j d
Where
Parameters:
s and d denote the originating and terminating node of a lightpath.
i and j denote the endpoints of a physical link
k: denotes the wavelength number from 0 to W-1.
q: used as subscript or superscript denotes the qth lightpath between a sourcedestination pair.
N: the number of nodes in the network.
W: the number of wavelengths a fiber can support.
m
={
m
s ,d
} the traffic matrix, i.e
m
s ,d
is the number of connections that are to
be established between node s and node d.
P i, j denotes the existence of a link in the physical topology. If
fiber link between node i and j, otherwise
P
i, j
( k ,q )
( k ,q )
i, j
=1 then there is a
F
q
( s, d ) =0.
( s, d ) =1, if there exists a qth lightpath between node s and node d uses
wavelength k, else
C
i, j
=0.
Variables:
F q(s, d ) =1, if there exists a qth lightpath between (s,d), else
C
P
C
( k ,q )
( s, d ) =0.
( s, d ) =1, if there exists a qth lightpath between node s and node d uses
wavelength k and is routed over physical link (i,j), else
C
( k ,q )
i, j
( s, d ) =0.
30
Since it is a Max-RWA problem, the objective function in equation (6.1) is to
maximize the sum of satisfied connections over all the SD pairs over all the lightpaths
for each. The traffic demand constraints in (6.2) ensures that the number of
connections established is at most
m
s ,d
. The wavelength continuity constraint in
(6.3) ensures that is a lightpath is exists then only one lightpath is assigned to it
among the W possible wavelengths.
Equation (6.4), the physical constraints, ensures that only those
( k ,q )
( k ,q )
C i, j (s, d ) could be non-zero for which the corresponding C (s, d ) variables are
non zero. This means that any established path must be established through a flow
over the links between different i,j nodes.
The wavelength capacity constraints (or wavelength clash constraint), in
equation (6.5) above, enforces that no two lightpaths traversing through the physical
link (l,m) will have the same wavelength assigned to them.
The flow balance or flow conservation equations, in (6.6) (similar to the more
simple version in the 1st presented approach) ensures that the same wavelength is
reserved at every node for a lightpath F q( s, d ) .
It should be noted, that due to the fact the both the Routing and Wavelength
assignment sub-problems are considered simultaneously, the ILP model is rather more
complex than the previous ones.
Solution of the LP-relaxation yields fractional flows which when appropriately
rounded up to a 0 or 1 yield an integer solution. For example when solving the LP( k ,q )
relaxation of the above ILP we obtain variables F q( s, d ) , C ( s, d ) and
C
( k ,q )
i, j
( s, d ) which contain the fractional flow information, where
C
( k ,q )
( s, d ) =0.5
would imply that 0.5 units of flow of the qth connection of source–destination pair
(s,d) using color k flows on physical link (i,j).
The algorithm used rounds variables obtained by solving the above ILP. Note
( k ,q )
( k ,q )
that by rounding variable of type F q( s, d ) , C ( s, d ) and C i , j ( s, d ) we obtain a
wavelength and a path to a connection of an SD pair. This algorithm terminates when
it can no longer round variables without violating wavelength continuity constraints.
2.4.7. Max-RWA, link-based, no conversion, multiple requests, single-fiber:
This approach was published also in [18], as an alternative to the previous
formulation. The main difference in this approach is its way of interpreting the
WRON, a WRON with W wavelengths being supported on a fiber is considered a
network with W multiple-fiber links between the nodes with each fiber supporting just
one wavelength. Each of the links labeled q {0, 1, 2, …. W-1}
Similar to the previous approach, this approach addresses the RWA problem
as a unit; the problem is formulated as a single ILP model incorporating both the
routing and wavelength assignment problem.
Let us first present the main characteristics and assumptions of the model:
31
Max-RWA;
Link-based model;
No wavelength conversion;
Multiple Requests:
Single-fiber links:
Wavelength continuity constraint is explicit in this model as the ILP addresses the
combined RWA problem.
The formulation is as follows:
Objective Function:
Maximize
F
s
( s, d )
(7.1)
d
Such that:
Traffic demand constraints:
C
q
( s ,d )
( s ,i ), q
i
C (i ,d ),q F ( s, d ) m s ,d
( s ,d )
q
( s, d ) (7.2)
j
Capacity continuity:
C
s
Flow conservation:
C
( s ,d )
( i , j ), q
i
P
( s ,d )
( i , j ), q
1
C ( j ,i ),q P ( j ,i ),q 0
q, ( s, d ), and j s, j d ,
( s ,d )
( i , j ), q
(i, j )q (7.3)
d
(7.4)
i
Where
Parameters:
s and d denote the originating and terminating node of a lightpath.
i and j denote the endpoints of a physical link
k: denotes the wavelength number from 0 to W-1.
q: used as subscript or superscript denotes the qth lightpath between a sourcedestination pair.
N: the number of nodes in the network.
W: the number of wavelengths a fiber can support.
m
={
m
s ,d
} the traffic matrix, i.e
m
s ,d
is the number of connections that are to
be established between node s and node d.
P (i, j ),q =1 denotes the existence of the qth multiple link of the physical link (i,j),
otherwise P (i , j ),q =0. q {0, 1, 2, …. W-1}
Variables:
F (i, j ) denotes the number of lightpaths established between node s and node d. it
takes positive integral values.
(i , j )
C (l ,m),q =1, if a lightpath is set up between node s and node d using the qth multiple
link of edge (i,j) , else
C
(i , j )
( l , m ), q
=0
Again as a Max-RWA problem, the objective function in equation (7.1) is to
maximize the sum of satisfied connections over all the SD pairs. The traffic demand
32
constraints in (7.2) ensures that the number of established lightpaths from origin node
s and destination node d are equal and is at most the requirement
m
i, j
, for source
destination pair (s,d).
Equation (7.3) ensures that at most one lighpath traverses the qth copy of the
link (i,j).
The flow balance equation in (7.4) in the same time ensures that at a node
"wavelength is conserved", i.e., the same wavelength is used on the incoming and
outgoing links of a lightpath.
Similar to the previous approach, this ILP model is solved in two steps, first
solving the LP-relaxed version, then using a rounding algorithm to obtain integral
routes and their assigned wavelengths.
2.4.8. Max-RWA, path-based, no conversion, multiple requests, mutli-fiber:
This approach was developed recently to address the problem of multi-fiber
links in the WRON [10] .
This approach handles the problem in a different method than the previous
presented approaches. If we consider the same decomposing of the RWA problem
into Routing and wavelength assignment problems, the difference will be clear:
1. Routing sub-problem:
In this formulation the routing problem itself is decomposed into:
The calculation of different paths for each connection request, and then
A selection for the optimal path for each one according to the imposed
constraints and the objective function.
Referring to the functional classification of static RWA problems (in section 2.2,
and in [11] ), where the routing problem is subdivided into search and selection, in
this formulation the search component of the routing sub-problem is first calculated
by finding a set of alternative paths for each connection.
As will be formulated in the model, for each connection request between any
source s and destination d, a physical path p P ( s, d ) is calculated. This concept
has been illustrated before in Figure 15. The figure shows a set of different SD pair
connection requests (the number of connection requests is R as conforming to our
notation), and for each request, a set of paths are calculated.
2. Wavelength assignment sub-problem:
Contradicting to the previous approaches, the selection component of the routing
problem along with the wavelength assignment is formulated as an ILP and is solved
for optimality. The solution of this ILP determines which paths of the candidate paths
for each request are used and a wavelength is assigned for each of them.
The basic characteristics of this approach as will be mapped to its ILP can be
given as follows, only different aspects will be commented:
Max-RWA
Path-based model
33
No wavelength conversion
Multiple requests
Multiple-fiber links
Wavelength continuity constraint is implicitly guaranteed because wavelengths
are assigned to entire paths rather than to individual links.
The formulation is as follows
Objective Function:
Maximize
Such that:
Capacity constraint:
Traffic demand constraint:
F
wW pP
F
pP ( e )
p,w
Ke
F
wW pP ( s , d )
(8.1)
p ,w
p,w
m s ,d
e, w
(8.2)
s, d
(8.3)
p, w
(8.4)
Integrality constraints:
F
p,w
o
, integer
where
K e denote the number of fibers deployed on link e E .
W
P
m
F
is the set of wavelengths a fiber can support.
denote the set of paths in the network. P(s,d) (or respectively P (e)) denote the
subset of paths in the network that use link ( respectively join nodes s and d).
s ,d
denote the number of connection requests between nodes s and d.
p,w
denote the number of lightpaths successfully routed over physical path
p P and assigned wavelength w W .
Note:
a connection request is realized by finding a physical path p P ( s, d ) and a
wavelength
lightpath.
w W that is assigned to every link on p. The pair (p,w) is called a
The objective function in equation (8.1) (different from the above models) is
to maximize the number of lightpaths successfully established.
The wavelength-capacity constraint (or alternatively referred to as wavelength
clash constraint) in equation (8.2) differently stated is the constraint that ensures that
the number of lightpaths routed over any link e and assigned the same wavelength w
does not exceed the number of fibers Ke deployed on that link.
Equation (8.3) ensures that the number of lightpaths established for a pair (s,
d) of nodes does not exceed the traffic demand for that pair.
The integrality and non-negativity constraints of flow variables are stated in
equation (8.4). It should be noted that the number of connection requests between any
SD pair
m
s ,d
, is assumed to be integer.
It is worth noting that wavelength continuity is implicitly guaranteed because
wavelengths are assigned to entire paths rather than to links.
34
The RWA problem in this approach, which is now the optimal solution of the
above presented ILP model, is solved using a Greedy algorithm. The authors proved
that any instance of the above problem for single wavelength is an instance of the
"maximum coverage" problem.
Maximum Coverage:
This problem can be formulated as follows; given a universal set U of elements, an
integer k, and a collection S of subsets over the elements (that satisfy some structural
constraints), the maximum coverage problem is to select k subsets from S such that
the total number of elements covered is maximized. It is worth mentioning that, in
some applications of the maximum coverage problem, the subsets in S may be
implicitly defined rather than explicitly given.
The authors used a simple greedy algorithm that was introduced and analyzed
by Hochbaum and Pathria in [16] for the maximum coverage problem. This greedy
algorithm is as follows (Figure 18):
Figure 18: Maximum coverage greedy algorithm
Their work proceeded by proving that any instance of the RWA problem is
also an instance of the maximum coverage problem and thus the above greedy
algorithm may be used to provide solutions that are guaranteed to be within a factor of
(1-1/e) of the optimal solution.
The proof, mainly specifies the abstracted sets used in the maximum coverage
problem. The universal set U of elements is considered to be the (multi-)set of
connection requests. In particular the U contains
m
s ,d
copies of the pair (s,d) of
nodes. A subset Si of U is the set of paths that can be realized simultaneously using
the same wavelength wi .Thus with each iteration of the greedy algorithm an RWA
problem as formulated above but with one wavelength wi available is solved and the
set of connection requests that can be satisfied Si is returned.
The above flow is best described with the below flow chart diagram in Figure
19
35
Start
No. of used Wavelengths = 0
Yes
All connections
satisfied?
No
No. of used Wavelengths =
No. of used Wavelengths +1
Call Greedy Algorithm for
maximum coverage
Assign the paths for the satisfied
connection the current
wavelength
Report
solution
End
Figure 19: flow chart of the algorithm used for RWA based on maximum coverage problem
2.4.9. Greedy Heuristic Approach:
This solution approach is different than the previous approaches. It addresses
the problem from a different point of view; this solution is based on a well known
problem in graph theory: the “maximum Edge Disjoint Path” problem (EDP) [19].
This problem is defined as follows:
Maximum Edge Disjoint Paths problem:
In this problem a graph and a set of source-destination pairs are given and the
requirement is to find Edge disjoint paths for as many of the pairs as possible. It is
easy to see that the maximum edge disjoint paths (EDP) problem is a combinatorial
optimization problem and is known to be NP-hard [20] .
The use of this problem and its developed solutions is the core of this
approach. The important observation is the fact that lightpaths that are assigned the
same wavelength will not traverse the same physical link, i.e., these paths are "edge-
36
disjoint"1. Hence, this approach is to use a greedy algorithm for the maximum Edge
Disjoint Paths problems to calculate all edge-disjoint paths that satisfy the maximum
number of connection requests, those paths will all use the same wavelength. Then
iterate again, by using a new wavelength as long as the connection requests are not all
satisfied. In such a manner, the overall heuristic approach solves the RWA problem,
by satisfying the given connection requests (or lightpaths) with the objective of
minimizing the total used number of wavelengths.
This heuristic approach is most close to the presented approach in (section
2.4.8) published in [10] . The main difference is that; at each iteration of the heuristic
algorithm, it calls a greedy algorithm for the EDP problem, rather than solving the
RWA problem for a single wavelength in the previous approach.
First, the greedy algorithm used to solve the EDP problem is presented in the
flow chart diagram below (Figure 20). The Greedy algorithm for EDP problem will be
abstracted as a building block in the next diagram. In brief, the operation of the
greedy algorithm for EDP problem is to select a random connection request and
calculate a path for it. Then delete all the edges shared in this path and pick another
request and try to satisfy it using the remaining edges of the network and so on, until
no requests can be satisfied.
It should be noted that this algorithm is based on a heuristic approximation (to
reduce down the search space) by only accepting paths that are length upper bounded
by the value: max( L , diam(G )) , where L is the total number of links in the network,
diam(G ) is the graph G diameter, which is defined as: the longest shortest path
between any vertices in the graph.
1
We have referred to such paths are link-disjoint paths
37
Start
No
More connections
available?
Pick a random connection
Find shortest path for the
connection
Yes
Path found &&
Path length <=
No
max( L , diam(G ))
Delete all the links used in
this path from the graph
Return all the
satified connections
Delete the
connection request
End
Figure 20: Greedy algorithm for EDP
Second, the next flow chart diagram, presented in Figure 21, shows the main
heuristic to solve the RWA problem. At each iteration, the algorithm tries to find
(through the use of the greedy algorithm for EDP problem) the maximum possible
number of connection requests that can be satisfied using the same wavelength (since
they are all satisfied by edge-disjoint paths). Then when not all the connection
requests has been satisfied the number of wavelengths used is increased and a new
iteration is started. The algorithm continues until all the connection requests have
been satisfied, with the minimum possible number of wavelengths used.
The authors, also showed using the same framework, the max-RWA problem
may e solved, that is maximizing the number of connection requests (or lightpaths)
satisfied using a limited number of wavelengths W per fiber. This can be achieved,
38
by terminating the algorithm, not only when all the connection requests have been
satisfied, but when the number of wavelengths used has reached W.
Start
No. of used Wavelengths = 0
Yes
All connections
satisfied?
No
No. of used Wavelengths =
No. of used Wavelengths +1
Call Greedy Algorithm for
EDP
Assign the paths for the satisfied
connection the current
wavelength
Report
solution
End
Figure 21: flow chart of the RWA heuristic based on greedy EDP algorithm
2.4.10. Min-RWA, path-based, full conversion, unique requests, single-fiber:
This approach was provided, among different formulations in [6] . This
approach is most similar to the first presented one in section (2.4.4, reference [17]) in
its use of pre-calculated candidate paths for each connection request. On the other
hand, it addresses the case of a network with full wavelength conversion capable
nodes as presented in section 2.4.3. The main difference is the formulation of the
objective function used.
As previously mentioned in section 2.4.3, this case reduces the RWA problem
to the classical routing problem (in circuit-switched telephone networks). For such
network with full wavelength conversion capability, there is no distinction between
available wavelengths, i.e the wavelength continuity constraint need not to be
satisfied along the lightpaths and the number of wavelengths on each link merely
39
specifies a capacity constraint on the total number of lightpaths that can cross that
link.
Thus the problem reduces to only Routing problem [23] , the routing problem
itself is simplified by calculating some candidate paths for each connection request (as
has been shown in Figure 16). As will be formulated in the model, for each
connection request between any source s and destination d, a physical path p Pi ,
i R is calculated
This approach focuses on these main characteristics and assumptions:
Min-RWA
Path-based model
full wavelength conversion;
unique requests
Single-fiber links
The wavelength continuity constraints are eliminated
The formulation is as follows:
Objective Function:
D (F
Minimize
l
lL
F
max l
F
Capacity constraint:
{ p|l p}
Traffic demands:
F
pPi
p
max l
F
{ p|l p }
(10.1)
)
(10.2)
p
W
l L
(10.3)
mi
i=1,….,R
(10.4)
p
Integrality constraints:
F
p
,non-negative integer p Pi , i R
(10.5)
where
R: denote the number of source-destination (s-d) pairs.
L: denote the number of links.
W: denote the number of wavelengths per link
m = {mi}, i=1,2….,R : number of connections to be established for source-destination
pair i
denote the flow on path p Pi for some connection requests i R .
F
p:
F
max l
: denote the total flow on a certain link
l L.
The overall cost function in equation (10.1) is given by the sum of link cost
functions and each of the link cost functions depends on the amount of flow on the
link which is determined according to equation (10.2). This link cost function is the
main difference in this approach and will be presented below.
40
The capacity constraint given in equation (10.3) ensures that the number of
flowing path on any link (each assigned a different wavelength) doesn't exceed the
number of available wavelengths. On the other hand, the traffic demand constraint in
(10.4) represents the requirement that the demand of each OD pair be satisfied by the
resulting path flows. Finally, the integrality of the path flow variables is stated in
equation (10.5).
The cost function, D l , presented in the model has two key features that
impact significantly on the nature of the optimal solution:
a) The cost function of every link is convex, monotonically increasing, and
piecewise linear. Thus, the marginal cost for routing a new lightpath over a
given link is larger than the marginal cost for routing the preceding
lightpaths on the same link.
b) The breakpoints of each piecewise linear link cost function occur at the
integer points (Figure 22).The cost for flow larger than W is , thereby
imposing a link capacity constraint.
Because of feature a), the resulting optimal solution of the associated linear
program, favors choosing paths with underutilized links, and tends to leave room for
future lightpaths. Because of feature b), the resulting optimal solution tends to be
integer, as we will explain shortly, thereby obviating the need for time-consuming
integer programming techniques.
|W-1|
|W|
Figure 22: Piecewise linear cost functions for link l.
The solution approach for the above formulation was based on the specific use
of the piecewise linear objective function. The use of piecewise linear objective
functions with integer break points has some important consequences. First, the
corresponding relaxed linear programming model, where the integer constraints are
replaced by the relaxed constraints, can be solved by efficient commercial or special
purpose simplex methods with fast running times. Second, even if we relax the integer
41
constraints, it appears that an integer optimal solution can still be obtained in most
cases of interest.
Using a simplex code, commercial optimization package CPLEX [24] , the
author's research indicates that for most of the cases, the relaxed problem, in any of
the given formulations, has an integer optimal solution (assuming it has a feasible
solution). The reason is that, because of the structure of the piecewise linear cost
function, extreme points of the relaxed constraint polyhedron appear to be integer in
the majority of cases. Intuitively, the extreme points of the constraint set tend to
correspond to the corner points of the piecewise linear objective function, which take
integer values. Note that, as can be seen from simple examples, other types of link
cost functions (e.g.: linear, or smooth and convex), such as those commonly used in
optimal data network routing, typically result in fractional optimal solutions for the
relaxed versions of these formulations.
Finally, it has been mentioned that even in the cases where the solution to the
relaxed problem may be fractional, the number of fractional variables in the solution
typically turn out to be insignificant relative to the number of integer variables. As a
result, it may be possible to round the fractional portion of the solution to integer with
the use of simple heuristics.
2.4.11. Min-RWA, path-based, no conversion, unique requests, single-fiber:
This approach was also provided in [6] . This approach is quite similar to the
one presented in section 2.4.8, (reference [10] ) as will be obvious in the ILP model.
The difference is in the objective function used both in its sense (Min-RWA versus
Max-RWA) and in the formulation itself.
This approach inherits most of its aspects from the previous one, except of
assuming in no wavelength conversion capability available in the network, as listed in
its characteristics below:
Min-RWA
Path-based model
No wavelength conversion
unique requests
Single-fiber links
Wavelength continuity constraint is implicitly guaranteed because wavelengths
are assigned to entire paths rather than to individual links.
As will be formulated in the model, for each connection request between any
source s and destination d, a physical path p Pi , i R is calculated. To
accommodate the different wavelength assignment for the lightpaths, the path-flow
variables has been modified to reflect such change. Thus, the new path-flow variables
are
{F p,w | p Pi , i R, w W }. The variable F p , w = 1 , if wavelength w is
used by path p, and 0 otherwise.
The formulation is as follows:
Objective Function:
Minimize
D (F
lL
l
max l
)
(11.1)
42
F
p,w
1
F
p,w
Capacity constraint:
{ p|l p }
Traffic demands:
max l
F
wW
{ p|l p }
pPi
F
{ wW }
(11.2)
p,w
l L, w W
mi
(11.3)
i=1,….,R
(11.4)
Integrality constraints:
F
p,w
=0,1
p Pi , i R,
w
W (11.5)
where
R: denote the number of source-destination (s-d) pairs.
L: denote the number of links.
W: denote the number of wavelengths per link
m = {mi}, i=1,2….,R : number of connections to be established for source-destination
pair i.
F
p,w :
denote the path-flow variables, where
path p, and 0 otherwise.
F max l : denote the total flow on a certain link
F
p,w =
1 , if wavelength w is used by
l L.
The objective function in equation (11.1) is used again as in the previous
approach , namely it is given by the sum of link cost functions and each of the link
cost functions depends on the amount of flow on the link which is determined
according to equation (11.2).
The capacity constraint given in equation (11.3) ensures that each wavelength
on each link can be used at most once. While, the traffic demand constraint in (11.4)
ensures that the demand of each OD pair is satisfied. Finally, the integrality of the
path flow variables is stated in equation (11.5).
As in the previous model, the solution of this model is based on exploiting the
advantages of the piecewise linear objective function used in the formulation. In a
similar manner, the authors argue that for most of the cases, the relaxed problem, in
any of the given formulations, has an integer optimal solution (assuming it has a
feasible solution).
2.4.12. Min-RWA, path-based, sparse conversion, unique requests, single-fiber:
In addition to the previous two approaches this one was also presented in [6] .
This approach is still similar to the two previous ones, but as referred to in the title; it
is a new way to compromise between the two previous assumptions of either full
wavelength conversion, or no wavelength conversion capability available.
Thus, as shall be presented in the formulation, this approach considers
networks with "sparse wavelength conversion". In other words, only a fraction of the
network nodes are equipped with wavelength converters. For these networks, we have
the additional freedom of switching wavelength channels along the lightpaths at the
nodes with converters.
43
Mostly common with the previous approaches presented in the same work, the
characteristics of this approach can be listed as follows:
Min-RWA
Path-based model
Sparse wavelength conversion
unique requests
Single-fiber links
Wavelength continuity constraint is implicitly guaranteed because wavelengths
are assigned to entire paths rather than to individual links, but due to considering
sparse wavelength conversion capable nodes in the networks, different flow
conservation constraints are presented and differ according to the node capability.
The authors in the corresponding formulation of this approach on hand,
introduced more granularity in the optimization variables in order to distinguish
between nodes that have converters and those who do not. More precisely, the
problem is formulated in terms of path-link-wavelength variables:
{F p,l ,w | p Pi , i R, l L, w W } . The variable
F
p ,l , w =1
, if wavelength
w is used on link l by path p and is zero otherwise.
(l 1, l 2) P if links
In what follows, we write
l
links of path P . Also,
P
l
1
and
l
2
are successive
(1) represents the first link along the path P .
The formulation is as follows:
Objective Function:
D (F
Minimize
l
lL
F
max l
F
Capacity constraint:
{ p|l p}
{ p|l p}
p ,l , w
F
Traffic demands:
wW
pPi
(12.1)
)
F
{ wW }
(12.2)
p ,l , w
l L, w W
1
l p (1), w
p,
max l
mi
i=1,….,R
(12.3)
(12.4)
Flow conservation:
F
wW
F
l1
p, ,w
l1
Integrality constraints:
p, ,w
F
wW
l 2, w
p,
p Pi , w W ,(l 1, l 2) p
F p, ,w
l2
F
p ,l , w
p Pi , w W ,(l 1, l 2) p
=0,1
p Pi , i R,
w
(12.5)
(12.6)
W , l L (12.7)
44
where
R: denote the number of source-destination (s-d) pairs.
L: denote the number of links.
W: denote the number of wavelengths per link
m = {mi}, i=1,2….,R : number of connections to be established for source-destination
pair i.
F
p ,l , w :
denote the path-link-wavelength flow variables, where
F
p ,l , w
=1 , if
wavelength w is used on link l by path p and is zero otherwise.
F max l : denote the total flow on a certain link l L .
The same group of constraints is used again with some differences. The
objective function in equation (12.1) is used again as piecewise linear function. Only
the sum of the link flows on the links in equation (12.2) is changed to reflect the use
of the new path-link-wavelength flow variables.
The capacity constraint and traffic demand constraints are unchanged and are
presented in equations (12.3) and equation (12.4) respectively.
The new set of constraints introduced for this case are the flow conservation
constraints in equation (12.5) and equation (12.6). These constraints take different
forms depending on whether or not there is a wavelength converter at that node. The
flow conservation for nodes with wavelength converter is presented in equation (12.5)
, where only the total number of lightpaths (assigned different wavelengths) should be
preserved in that node. Equation (12.6) represents the case of nodes without
wavelength converters, and thus every lightpath with its assigned lighpath should be
preserved along this node. Finally, the integrality of the path flow variables is stated
in equation (12.7).
This formulation introduces networks with sparse wavelength conversion,
which is interesting in practice because practical considerations prohibit using
wavelength converters at all the routing nodes.
To overcome the problem of the above formulation, where more constraints
have been used, the authors introduce a modified formulation with fewer constraints.
The modification depends on using the penalty function. Basically, the authors
eliminate the conservation of flow constraints at nodes with no wavelength converters
and add to the cost function a penalty term that prescribes a high cost to assignments
which violate these constraints. Associated with the penalty term in the cost function
is a penalty parameter that determines the degree of penalty and, as a result, the
extent to which this alternative penalized problem approximates the original. As
increases, the approximation becomes more accurate.
Using F max l
F p ,l , w , which represents the total flow on link l, in
{ p|l p}
{ wW }
the cost function D l ( F
lL
max l
) , we arrive at the following penalized cost
function:
45
F p ,l , w )
D l ( F max l { p
lL
|l p} { wW }
F p,l1, w F p,l 2, w
wW iR pPi
(
,
)
p
l
l
1 2
(12.8)
Classical optimization results, state that the relaxed version of problem of the
above approach with objective function as shown in equation (12.8) admits an exact
penalty, meaning that when the relaxed problem is feasible and the scalar >0 is large
enough, the corresponding penalized problem has the same solutions as the original
relaxed problem. Hence, if our problem is feasible, we can find the RWA using the
alternative formulation with the penalty function, provided that we choose the penalty
parameter sufficiently large.
Suppose now that we add conservation of flow constraints at nodes with no
converters, pretending there are wavelength converters at these nodes. The optimal
solution of the problem does not change, since it already satisfies these constraints.
We thus arrive at penalized formulation shown below, together with the integrality
constraints.
Objective Function:
F p ,l , w )
D l ( F max l { p
lL
|l p} { wW }
F
F
p,l1, w
p,l 2, w
wW iR pPi
(l1,l 2) p
F
Capacity constraint:
{ p|l p}
p ,l , w
F
Traffic demands:
wW
pPi
1
l p (1), w
p,
(12.8)
l L, w W
mi
i=1,….,R
(12.3)
(12.4)
Flow conservation:
F
wW
l1
p, ,w
F
wW
l 2, w
p,
p Pi , w W ,(l 1, l 2) p
(12.5)
The penalized problem has multiple advantages of the original formulation as
can be listed below:
The advantage that it may have a feasible solution even when the original
problem is infeasible. In particular, if the original problem is feasible and has
some optimal solutions, the penalized formulation has the same optimal
solutions (assuming is large enough).
If the original problem is infeasible, i.e., there is no possible RWA to satisfy
the requests for a network with a given limited number of converters, the
46
penalized problem may still have an optimal solution that involves wavelength
conversions at some of the nodes where there are actually no converters. This
solution is helpful during a network design process; because it indicates the
best placement of extra converters in order to satisfy the given light-path
request set.
The exact penalty formulation can also be used within several other network
design contexts. In particular, it can be used for reconfiguration purposes, in
order to adapt to changes in traffic demands or network topology. Given a
small change in the current operating conditions of the network, we would
ideally like to maintain the RWA for the existing lightpaths as much as
possible. This can be achieved by introducing a penalty in the cost function
that penalizes changes from the current assignment scheme. Then the
algorithm tries to find the best assignment suitable for the new conditions in
the network without deviating much from the previous assignment.
From the use of the penalized objective function, the problem is modified as if it
addresses the problem of RWA problem of a network with full wavelength
converters. Thus it becomes much simpler to solve this new formulation. The same
solution techniques introduced for the above two approaches can be used with this
modified formulation.
2.4.13. Min-RWA, path-based, sparse conversion, multiple requests, multi-fiber:
This work was presented in [30] The aim of the authors was to solve the RWA
problem in multi-granularity WDM networks.
These networks include nodes with multi-granularity switching capabilities. In
particular examples of multi-granularity optical cross-connects (MG-OXC) include:
Lambda-Switch Capable OXC (LSC-OXC): capable of switching on a
single lambda
Waveband-Switch Capable OXC: capable of switching a waveband (i.e.
multiple lambdas)
Fiber-Switch Capable OXC (FSC-OXC): capable of switching an entire
fiber.
Multi-granularity optical cross-connect MG-OXC is considered having the capability
of any of the above or any combination of them.
The authors consider in particular WDM networks, with fiber-switch capable
(FSC-OXC) and lambda switch capable (LSC-OXC) devices. It is worth mentioning
that, as shown in Figure 23, an MG-OXC node is logically identical to an individual
FSC-OXC node in conjunction with an external separated LSC-OXC node. As a
consequence the authors adopt the separated node form.
The RWA problem for such multi-granularity switching nodes is referred to
by RWA+. It is formulated as a linear integer problem stated as follows. Given a
physical topology (with FSC-OXCs and LSC-OXCs) and available wavelengths on
each link, and requested lightpath demands between all source-destination pairs,
determine the routes and wavelengths of lightpaths, such that the maximum number
of lightpaths on the most congested link is minimized, subject to the wavelength
47
continuity constraint. For ease of illustration, the number of available wavelengths on
each link is assumed the same.
Figure 23: a combined MG-OXC node and its logically separated form: (a) MG-OXC node, (b) FSCOXC and LSC-OXC nodes.
Due to the existence of FSC nodes, a graph transformation is first required.
For each FSC node with input (and output) fibers, it is replaced by a bipartite subgraph with phantom nodes connecting to input fibers, and another phantom nodes
connecting to output fibers. Besides, there are additional phantom links connecting
the phantom nodes. These phantom links describe possible configuration
combinations in-side an FSC node.
As previously, the characteristics of this approach can be listed as follows:
Min-RWA
Path-based model
Sparse wavelength conversion
Multiple requests
multi-fiber links
Wavelength continuity constraint is implicitly guaranteed because wavelengths
are assigned to entire paths rather than to individual links.
The formulation is as follows:
Objective Function:
Minimize
Subject to:
(13.1)
F
sd S
p
P sd
F
Traffic demands:
p
P sd
Capacity constraints:
wW
p,w
wW
p,w
F
sd S
p
p,w
pl
m sd
pl
1
|W |
l L
(13.2)
sd S
(13.3)
l L, w W
(13.4)
P sd
FSC nodes constraints:
48
F
sd S
p,w
p
P sd
Z
l
L
l
F
Z
l
L
l
F
l L , w W
F
Zl
pl
(13.5)
1
lv
v V n , n N (13.6)
1
lv
v V n , n N (13.7)
in
out
F
F
Integrality constraints:
F
p,w
0,1
p P sd , sd S , w W (13.8)
0 1
Z
l
(13.9)
0,1
l L
F
(13.10)
LSC nodes constraints:
F
sd S
p
p,w
1
pl
P sd
n N
L
(13.11)
The notation used in the formulation can be summarized as follows:
Input values:
F
N set of FSC nodes in the network;
N set of LSC nodes in the network;
L set of physical optical links;
L set of phantom links within FSC nodes;
V set of phantom input nodes for node n;
V set of phantom output nodes for node n;
W set of available wavelengths on each link; (assumed to be the same for
L
F
in
n
out
n
simplicity);
S set of source-destination (SD) pairs requesting light-path setup;
S the set of SD pairs where node is the source node;
P candidate path set for SD pair ;
n
sd
m
sd
pl
lv
lightpath demand for SD pair ;
=1 if path includes link; =0, otherwise;
=1 if link l is incident to node v; =0, otherwise;
Decision variables:
most congested link utilization (lightpath number/ W).
F
p , w =1
if lightpath p uses wavelength w; =0, otherwise;
49
Z
l
=1 if phantom link l is selected; =0, otherwise;
The objective function is to minimize the highest utilization (
), namely, the
utilization on the most congested fiber link with the maximum number of lightpaths
passing through. Constraint (13.2) requires that the number of wavelengths used on
every link be less than that of the most congested link. Constraint (13.3) is the traffic
demand constraint, and restricts the lightpaths demands of all SD pairs to be satisfied.
The capacity constraint in equation (13.4) indicates that for each link, there
can be at most one lightpath using each wave-length. Constraints (13.4) and (13.8)
jointly correspond to the wavelength continuity constraint.
In particular, due to FSC nodes, Constraints (13.6), (13.7), and (13.10)
delineate the possible configurations of FSC nodes, through the value of the decision
Z
variable
l . Constraint (13.5) states that paths can only pass through the phantom
links determined by (13.6), (13.7) and (13.10).
Constraint (13.11) is a redundant constraint to constraints (13.4) and (13.5). It
is only added fro optimization purposes.
The solution approach for this work relies on the Lagrangean relaxation (LR)
method, which has been successfully employed to solve complex mathematical
problems by means of constraint relaxation and problem decomposition [31] .
Particularly for solving linear integer problems, unlike the traditional linear
programming approach that relaxes integer into non-integer constraints, the LR
method generally leaves integer constraints in the constraint sets while relaxing
complex constraints such that the relaxed problem can be decomposed into
independent manageable sub-problems.
Essentially, the original primal problem is first simplified and transformed into
a dual problem after some constraints are relaxed. If the objective of the primal
problem is a minimization (maximization) function, the solution to the dual problem
is a lower (upper) bound to the original problem.
The dual problem can be constructed as follows; constraints (13.2), (13.4), and
(13.5) are first relaxed from the constraint set. As shown in the first line of (13.12),
the three expressions corresponding to the three constraints are respectively multiplied
by Lagrangean multipliers s, q, and r, and then summed with the original objective
function. Using the above process the problem (P) is transformed into a dual problem
Dual(P), with objective function given in (13.12) and subject to constraints (13.3),
(13.6) , and (13.11) where
(q, r, s) is the non-negative Lagrangean multiplier
vector.
50
S l F p , w
sd S p
lL
P sd wW
min q F p , w
lw
lL wW
sd S pP sd
F r lw F p , w
sd S pP sd
lL wW
Z
dual
Z
dual
|
W
|
pl
1
pl
Zl
pl
1 S l | W |
lL
sd S
pP sd wW
min ( S q ) pl r lw pl F
l
lw
F
lL
lL
F r lw Z l q lw
lL
wW
lL wW
(13.12)
p ,w
With the above transformation, the current problem is to determine the
Lagrangean multiplier vector values. This is accomplished using a Lagrangean
Relaxation with Heuristics (LRH) algorithm. The algorithm is shown in Figure 24.
The algorithm repeatedly computes upper and lower bounds on the problem using two
different heuristics and updating the bounds with the multiplier vector accordingly.
The algorithm starts by initializing all the multipliers, upper and lower bounds,
and the quiescence_age variables. The quiescence age is an indication of the
improvement of the solution as shall be clear. The algorithm runs for a number of
total iterations; at each iteration, a lower bound solution is calculated by solving the
dual problem. As long as quiescence age does not pass the quiescence threshold
value, it is incremented and the Lagrangean multiplier values are updated. On the
other hand, is the quiescence age passes the threshold it is re-initialized, and an upper
bound is calculated by solving a heuristic for the original problem. Through the above
process, the multiplier values are updated and upper and lower bound difference is
reduced.
51
Algorithm LRH
Begin
Initilialize the Lagrangean multiplier vector S:=0, q:= 0 and r:=0;
UB:=1 and LB:=0; /* upper and lower bounds on
quiescence_age:=0;
For each K:=1 to iteration_Number do
Begin
Run Dual(P)_heuristic
If Zdual > LB
Then LB:= Zdual and quiescence_age:=0;
Else quiescence_age:= quiescence_age+1;
If quiescence_age >= Quiescence_Threshold
Then quiescence_age:=0;
Run (P)_heuristic;
If ub<UB then UB:= ub;
update multiplier vector;
End;
End;
Figure 24: Langrangean relaxation with heuristics (LRH)
1. Lower Bound calculations:
The dual problem, as a relaxation to the original problem always calculates a
lower bound on the solution of the original one. Thus, a heuristics to solve the dual
problem has been employed.
A closer look at the objective function of equation (13.12) of the dual
problem, we realize that decision variable , decision variable F , and decision
variable Z are all separated. In this manner, the dual problem can be decomposed
into three independent sub-problems: S1, S2, and S3. Specifically, we have:
Z
dual
Z
Z S2 Z S3 q
S1
lL wW
(13.13)
lw
Where:
Sub-problem S1 is given by:
Z s1( s) min(1 S l | W | ) , subject to constraint (13.9).
lL
Sub-problem S2 is given by:
(
q
,
r
)
min
Z s2
sdS pP
subject to constraint (13.3).
( S l q lw)
wW lL
sd
pl
r
l
L
F
lw
F
pl
,
pw
Sub-problem S3 is given by:
, subject to constraints (13.6), (13.7), and
(
r
)
min
Z s3
l F wW r lw Z l
L
(13.10).
52
Then, each of these sub-problems can be solved independently using an appropriate
heuristic algorithm and integrated again to form the solution of the dual problem.
2. Upper Bound calculations:
The upper bound is computed by solving the original problem with a special
heuristic. The heuristic solved the combined original problem based on cost values
previously obtained from the Lagrangean multiplier. The algorithm repeadtly applies
the Dijkstra's shortest path algorithm to in a an effort to satisfy the lightpath demands
of all the SD pairs.
The algorithm terminates when all the lightpath demand are all satisfied or there is
no remaining resources (infeasible problem) in the network.
2.4.14. Tabu Search Heuristic Approach:
This solution approach recently presented in [28] is a heuristics based
approach. It relies on the tabu search framework.
Although this approach depends on no ILP model, we will provide below in
our discussion the main characteristics of the approach. This will provide a common
base for comparison between different approaches. The approach mainly addresses
the Max-RWA problem, where the objective is to maximize the number of satisfied
connection requests.
In the same time, the approach handles multiple connection requests between
the same source-destination nodes. On the other hand, the approach doesn't address
the networks with multifiber links.
These characteristics can be summarized as follows:
Max-RWA
Path-based approach
No wavelength conversion
multiple requests
Single-fiber links
Wavelength continuity constraint is implicitly guaranteed because wavelengths
are assigned to entire paths rather than to individual links.
Before, we present the algorithm, let us first present the notations used in this
work. In the following, we will use the following notation. Let G = (V,E) be a graph
with a set V of nodes and a set E of edges. A path µ in G from node a V to node b
V is a sequence µ = (a = a1, a2, . . . , b = an) of nodes connected by the edges (a1,
a2), (a2, a3), etc. The length of path µ equals n−1, i.e., the number of nodes in the
sequence, minus one.
The authors use PATHS(G) to denote the set of paths in G, PATHS(a, b,G) to
denote the set of paths from a to b in G, and SHORTEST-PATHS(a, b,G) to denote
the set of shortest paths from a to b in G. two paths µ = (a1, a2, . . . , an) and µ' = (a'1,
53
a'2, . . . , a'p) are said to be adjacent, and noted µ1 ∩ µ2' = , if there exist integers i(1
≤ i ≤ n − 1) and j(1 ≤ j ≤ p − 1) such that ai = a'j and ai+1 = a'j+1.
An RWA problem instance is defined by: the topology of the network, the
traffic requirements (set of demands to be satisfied), and the number of wavelengths.
The network is represented by a non-oriented graph G = (V,E) with nodes in V
representing stations and edges in E representing bi-directional links. Demands are
numbered from 1 to R, with origin(i) and destination(i) representing the origin and the
destination of demand i, and multiplicity(i) the traffic requirement from origin(i) to
destination(i). Finally, the number of wavelengths is denoted by W.
A lightpath is represented by a couple (µ, w) defined by a path µ in the
network and a wavelength w : (µ, w) PATHS(G) ×{1, . . . , W}. A potential
solution of the RWA problem is a set S of lightpaths, with S = S1 S2 . . . SR,
each Si representing the set of ightpaths to satisfy demand i : Si PATHS(origin(i),
destination(i),G)×{1, . . . , W}. To be a feasible solution, S must satisfy the two
following constraints:
|Si| ≤ multiplicity(i), i(1 ≤ i ≤ R)
(13.1)
(µ1, w) S, (µ2, w) S, µ1 µ2 => µ1 ∩ µ2 =
(13.2)
Constraint (13.1) imposes that each set Si does not contain more lightpaths
than required by demand i. Constraint (13.2) forbids two adjacent lightpaths µ1 and
µ2 to use a same wavelength. The goal of the RWA problem is to satisfy a maximum
number of demands, i.e., to find a solution S with a maximum |S|. Finally, notice that
i=1...R multiplicity(i) represents an upper bound of |S|.
To solve the RWA problem based on the tabu search framework, the authors
propose the tabu-RWA() algorithm described in Figure 25. This algorithm has two
main steps. During Step 1, a set of paths is selected in the graph. Then Step 2 uses
paths selected during Step 1 to build a solution of the problem.
During Step 1, the algorithm builds the sets of paths (Pi)i=1...R. For each
demand i, the set of shortest paths from origin(i) to destination(i) is built, and these
paths are introduced into set Pi. Let now P denote the union of sets Pi : P = i=1...D Pi.
Then, for each pair of paths {µ, µ'} in P, paths µ and µ' are determined is they are
adjacent or not.
54
Algorithm Tabu-RWA()
// Parameter maxIt: maximum number of iterations
// Parameter lg: number of iterations a lightpath remains tabu
// (Pi)i=1..D: sets of candidate paths
// S: current solution
// S*: best solution
// it: counter of iterations
/* Step 1 Selection of paths */
1. For i = 1 to R do
1.1 Set Pi:= SHORTEST-PATHS(origin(i),destination(i), G)
1.2 For each pair {µ, µ’}
.
/* Step 2 Construction of the solution */
2. S := {}
3. it := 1
4. While it ≤ maxIt and |S| < ∑i=1..R multiplicity(i) do
4.1 Let CAND be the set of candidate lightpaths:
CAND = CD
W} – S,
where CD = { i=1..R : |(P
,…,L})∩ S| <multiplicity(i)}.
Choose the best non-tabu (µ, w ) CAND, i.e. the one such that
{(µ’,w) S
4.2 Insert (µ, w) into S while removing lightpaths that are incompatible
with (µ, w): S := S {(µ,w)} - {(µ’, w) S :
4.3 If |S| > |S*|
S* := S.
4.4 Render lightpath (µ, w) tabu for lg iterations.
4.5 it := it + 1
5. Return S*
Figure 25: Algorithm Tabu-RWA(), as adopted from [28]
During Step 2, Tabu-RWA builds a solution by using the paths selected during
Step 1. Tabu-RWA is based upon neighborhood search; therefore, a solution S is
initialized and then iteratively transformed, and the best solution found is returned at
the end. The current solution S is initially an empty set of lightpaths. Then, on each
iteration, the current solution S is modified by inserting a lightpath (µ, w) into it. At
the same time, any lightpath (µ', λ) in S such that µ’ is adjacent to µ is removed from
S; therefore, the new so obtained solution S satisfies constraint (13.2).
CAND represents the set of candidate lightpaths that can be inserted into S.
CAND is defined as CAND = CD × {1, . . . , W} − S where CD = {i = 1. . . R : |(Pi
×{1, . . . , L}) ∩ S| < multiplicity(i)}.Notice, the new solution S also respects
constraint (13.1), due to the way set CD is defined.
In order to avoid to be trapped in local optima, Tabu-RWA uses a tabu
strategy: after each iteration, the lightpath (µ, w) which is inserted into S is made tabu
55
for a fixed number lg of iterations (where lg is a parameter of the procedure). It means
that, during that period, if (µ, w) is removed from S, it will not be allowed to be
reintroduced into S. Because the problem is to maximize |S|, the ”best” candidate
(µ,w) in CAND to be inserted into S is therefore the one that minimizes the number
|{(µ', w) S : µ ∩ µ' }| of lightpaths that will be removed from S.
On each iteration, the Tabu-RWA algorithm chooses the best non-tabu
candidate. The procedure stops after a maximum number of iterations specified by
parameter maxIter. The search also stops if |S| = i=1...R multiplicity(i) because, in this
case, S is proven to be optimal. Finally, the procedure returns the best solution found
S*.
In addition, the authors also proved a complexity analysis of the algorithm.
They proved that the overall complexity of a tabu iteration is O(|P|2).
2.5.
Technical classification for MC-RWA:
The Multicast-Routing and wavelength Assignment problem (MC-RWA) was
first presented in the previous chapter, in this section we present the different
problem's assumptions or variations and then discuss the different contributions for
this problem. As the problem's name implies, the problem inherits the same technical
classification of the parent RWA problem. In addition, one more feature is the node's
splitting capability.
1. Splitting capability:
Different research approaches have different assumptions on the availability of
splitting capability for different nodes in the network (whether or not equipped with
MC-OXC). Mostly treated like the wavelength conversion capability, the splitting
capability can have different levels:
Full splitting capability
Sparse splitting capability
No splitting capability
According to whether all the network, only a limited subset of the nodes, or
none of the node are equipped with splitting capable OXC's, respectively. In most
cases, the splitting capability assumptions are combined with the wavelength
conversion capability. This generated interesting cases for study.
These different cases are demonstrated in the following example. Figure 26
shows a part of a network, where node S is the source of a multicasting request, and
nodes 1 through 4 are some of the destinations of the session. There are four possible
cases depending on whether or not node 2 is capable of wavelength conversion and/or
splitting.
56
Figure 26: An example of multicasting routing and wavelength assignment. Node 2 is
considered with the 4 combinations of wavelength conversion and splitting capabilities.
The first two cases where node 2 has and does not have the wavelength
conversion capability are shown in Figure 26 (a) and (b), respectively. In both cases,
it is assumed that node 2 has the splitting capability and thus can multicast to nodes 3
and 4. Note that, whether or not node 2 has the wavelength conversion capability does
not affect the multicasting tree (at least its structure) but does affect how wavelengths
can be assigned on each link in the multicasting tree.
The other two cases which are similar to the first two except that node 2 does
not have the splitting capability are shown in Figure 26 (c) and (d), respectively. In
both cases, since node 2 can only forward one copy (e.g. to node 3), a separate path
from S to node 4 is needed. Accordingly, more bandwidth (in terms of the number of
channels) will be consumed, when compared to the first two cases.
2. Session multiplicity:
Different research approaches can be compared according to their support of
single or multiple multicast sessions. A multicast session is a request where the same
single source requests to cast to different destinations.
Again, in this study, we survey the different formulation, and solution
approaches for the static traffic MC-RWA problem, for the general Mesh topology
case while varying the rest of assumptions of the problems (splitting capability,
wavelength conversion capability, fiber multiplicity, requests multiplicity, and
objective function).
2.6.
Different Approaches for static MC-RWA (incomplete):
As for the RWA problem, in this section we will present different solution
approaches for the static MC-RWA problem. The different solution approaches will
be referred to according to their objective function, formulation, and fiber and
requests multiplicity.
2.5.1. Heuristic Approach, single-session, full-splitting capability:
This solution approach as presented in [32] is a heuristics based approach.
The approach aims to construct light-trees (as previously defined in the previous
chapter) under static traffic assumption.
57
It should be noted that this approach addresses the problem under the
assumption that every node in the network has the splitting capability. Moreover, only
one multicasting session is addressed by this approach. A multicast session is a
request where the same single source requested to cast to different destinations.
This approach also relies on decomposing the MC-RWA problem into two
main sub-problems:
Routing sub-problem
Wavelength Assignment sub-problem
1. Routing sub-problem:
This problem is first solved using a proposed heuristic algorithm. This
algorithm is based on shortest-path heuristic.
Figure 27: Multicasting tree construction heuristic algorithm,
as adopted from [32]
As shown above, at each iteration the algorithm adds more destinations to the
currently constructed tree. As mentioned earlier this approach assumes that every
node in the network has the splitting capability, and thus can have as many immediate
children in the multicasting tree as needed.
2. Wavelength Assignment sub-problem:
Since, only one multicast tree is constructed, a single wavelength is to be used
over all the links it spans. Hence, the wavelength assignment causes no problem for
this case.
The above approach based on the unpractical assumptions of only one
multicast session requested and full splitting capability in the network does not
provide realistic solution to the problem. On the other hand, it is the base for more
practical solutions and complex algorithms as shall be seen in the next section.
2.5.2. Heuristic Approach, single-session, sparse-splitting capability:
This solution approach was also presented in [32] as a heuristics based
approach. Similarly this approach aims to construct different light-trees (as previously
defined in the previous chapter) under static traffic assumption. The objective is to
construct these trees using the minimum possible number of wavelengths.
The main difference is that in this approach the case where different nodes
may posses the splitting capability or not is considered, referred to as "sparse-splitting
capability". In this case only a few nodes have the splitting capability, and those who
58
do not have the splitting capability will not be able to have more than one immediate
child in a multicasting tree. Accordingly, in order to reach all the destinations in a
multicasting session, a multicasting "forest" consisting of one or more multicasting
trees rooted at a common source needs to be constructed.
This case can be further illustrated based on the following example. The
example network is shown in Figure 28, where node 1 is the source of a multicasting
session, and nodes 2-9 are the destinations, of which nodes 3,4 and 6 do not have the
splitting capability. When shortest path (in terms of hop counts) routing is used to
construct the multicasting tree, it is possible that node 9 is considered last, and thus, it
cannot be included in the multicasting tree since both of its neighbors, nodes 4 and 6
cannot do splitting. In this case, a second multicasting tree has to be constructed
which overlaps with part of the current one (i.e. on links 1-2-4). Therefore, for this
multicasting session, two multicasting trees are needed.
Figure 28: An example multicasting forest in a NSFNET-like network with sparse splitting
This approach also relies on decomposing the MC-RWA problem into two
main sub-problems:
Routing sub-problem
Wavelength Assignment sub-problem
1. Routing sub-problem:
This problem is first solved using a proposed heuristic algorithm. This
algorithm is a more general one than the previous tree-construction algorithm. The
basic idea of the algorithm that can be used to construct a multicasting forest for a
given multicasting session is as follows. The algorithm first tends to include as many
destinations as possible in one multicasting tree. If there is any node that cannot be
included, the algorithm is recursively called to construct the second multicasting tree
(and the third, and so on, if necessary).
Specifically, let V be the set of nodes that includes the source and other nodes
which are already in the current tree, and which are either leaf nodes or have the
splitting capability or both. Essentially, V contains the set of nodes through which the
multicasting tree can grow. On the contrary, let V' be the set of non-leaf nodes that do
59
not have the splitting capability through which the multicasting tree cannot grow. In
addition, let UV be the set of destinations that have not been included in any
multicasting tree of the current session.
To account for the lack of the splitting capability at some nodes (other than the
source), we need to ensure that once such a node becomes an intermediate node in the
multicasting tree, it is excluded from set V if it already exists in V and put to V'.
The following is the pseudo-code of the multicasting forest construction
algorithm for a given multicasting session.
Figure 29: Multicasting "forest" construction heuristic algorithm, as adopted from [32]
Note that using the above algorithm, the path between the source and each of
the destinations used in the multicasting tree may not always be the shortest path
between them.
2. Wavelength Assignment sub-problem:
The authors consider the wavelength assignment problem, for assigning
wavelengths to the constructed multicasting forest in three cases corresponding to no,
sparse and full wavelength conversion. In the case of full wavelength conversion, any
wavelength can be assigned on each link, while in the case of no wavelength
conversion; the same wavelength has to be assigned to each subtree.
In this section_ we descri be how wavelengths are assigned and i n partic ular _ how many wavelengths are needed for a
The authors propose a solution for wavelength assignment for the more
general case of sparse wavelength conversion. They explain that it can be performed
independently on each segment, which is a collection of links, as follows. In each
subtree, they remove all the intermediate (i.e. non-leaf) nodes which have the
wavelength conversion capability but keep the associated links. In this way, a subtree
may be partitioned into several segments, each of which requires the same wavelength
to be assigned on all its links since there is no wavelength conversion capability
within a segment.
For example, in the multicasting forest shown in Figure 28, there are three
subtrees (trees sharing the same root branch, which contain for example, leaf nodes 5
60
and 7, leaf node 9, and leaf node 8, respectively). Among the intermediate nodes, only
node 2 is capable of wavelength conversion. After node 2 is removed, we will have 3
segments (1-2,2-5, 2-4-7) from the first subtree, 2 segments (1-2,2-4-9) from the
second subtree, and only 1 segment (1-3-6-8) from the third subtree.
The authors adopted the "First-Fit" algorithm to perform wavelength
assignment within each segment for its simplicity, although other heuristics may also
be used.
2.7.
Motivation:
As seen from the approached presented above, the following aspects can be
inferred:
Only few models addressed the Min-RWA problem.
Mostly all the approaches presented ILP models, but relied on
approximation or heuristic algorithms to solve the problem especially for
large size networks.
No model addressed the Min-RWA problem with multi-fiber links case.
From the above reasons we were motivated to propose a new intuitive
approach to address the Min-RWA problem and that can be general enough to
incorporate most of the different cases such as: muti-fiber links, and multiplerequests. Hoping that, with this approach, we can provide guaranteed optimal
solutions without the need to rely on heuristics, even for large size networks.
61
Chapter 3
3. Proposed Approach
This chapter is mainly concerned with the discussion of the proposals made to
the research area of interest, namely the static RWA problem. A proposed model will
be presented. In addition an arising problem in network design is considered for
discussion and a solution based on our framework is provided.
3.1. Comparison:
In this section, we will compare the different approaches presented in the
survey chapter. The different approaches fall mainly into one of the three following
categories:
1. Link-Based approaches:
These are the approaches similar to the ones presented in sections 2.4.1 and
2.4.2 (reference [13] ), 2.4.6 and 2.4.7 (reference [18]).
The main advantage of such approaches is the fact that it covers all the search
space of the problem (in terms of possible paths for each SD pair). This advantage
comes with an extra cost, as it leads to a large number of variables and constraints in
the model making the model hardly tractable. Moreover, the problem is often
decomposed into two sub-problems; Routing sub-problem and Wavelengthassignment sub-problem (as in [13] ), which generally leads to sub-optimal solutions.
2. Path-based approaches:
These are the approaches similar to the ones presented in sections 2.4.4 and
2.4.5 (reference [13] ), 2.4.8 (reference [10] ), and 2.4.10, 2.4.11, 2.4.12 (reference
[18]) and 2.4.13 (reference [30] ).
These approaches represent the compromise of the difficulties encountered in
the precedent approaches. The search space is reduced by considering a limited set of
candidate paths (note that the total number of paths grow exponentially in the number
of network links in the network). This reduces the number of variables and constraints
in the model, but may lead to sub-optimally if the number of candidate paths is below
a certain threshold.
3. Heuristic approaches:
A number of approaches falling into this category has been presented in
sections; 2.4.8 (reference [10] ), 2.4.9 (reference [19]), and 2.4.14 (reference [28]).
In these approaches the solution quality is traded for the techniques'
complexity. In the approach presented in 2.4.8, the solution is guaranteed to be
within tight bounds of the optimality.
62
3.2. Proposal:
As can be seen from the variety of approaches for the problem, the
contribution to such an active area of research is a complicated task. It is not easy to
outperform the presented approaches in theory and/or practice. In what follows, we
will present the different proposed points to our static RWA problem.
3.2.1 Handling multiple-fibers:
As a part of our proposed approach, we propose an intuitive idea of handling
the multiple-fibers case in the RWA problem. This idea is can be incorporated in any
path-based formulation without any need for modifications in the model itself, which
makes it independent on the specific path-based formulation in use. The reason
behind such independence is the fact that the idea is a slight modification made in the
search phase of Routing sub-problem (reference to section 2.4). In other words, we
only modify the way the candidate paths are pre-calculated.
The simple idea is to consider the network as modeled as an undirected multigraph instead of a simple undirected graph. With this in mind, each fiber copy of the
same physical link is considered individually. This way when searching for a path
between any source-destination nodes, different fibers (even for the same physical
link) may belong to different paths.
To illustrate this idea, consider a simple network with only two links and for
simplicity each having two fibers per link. A connection is requested between node 0
to node 2. Such a case could be handled by finding the path 0 1 2 and this path
could be assigned wavelengths either on the 1st group of fibers or the 2nd. This case
is shown in the figure below (Figure 30)
0
1
2
Figure 30: WRON with 2 links each of 2 fibers
Our proposed idea is to consider this network graph as a multi-graph, thus
each link is decomposed to two separate links. And in the search phase of the routing
sub-problems, those tow different links could be used to form two different candidate
paths (Figure 31). Moreover, they are link-disjoint paths.
0
1
2
Figure 31: same WRON viewed as multi-graph
We should note that this view point of the network model as an undirected
multi-graph for handling multiple-fibers is quiet different from the view of the
network as layered copies of the same physical network according to the number of
wavelengths in each link. Each handles a different level of modeling in the network,
in the first each link if considered having different copies according to the fiber
63
multiplicity, and in the other the whole network is considered as layered copies
according to the number of wavelengths in each link. In fact, both viewpoints can be
combined together, were each layer of the network can have multiple copies of the
links according the fiber multiplicity.
3.2.2 Model (ILP formulation):
Our proposed model is based on the same set of constraints appearing in the
presented model in section 2.4.4 (reference [17]).
The main differences between the basic approach and the one we propose are:
Addressing the multiple-fiber case: based on our proposed idea in the section
above, which merely changes in the candidate paths pre-calculation (the search
phase of the routing-sub-problem)
Addressing the Min-RWA Problem: we have changed the objective function to
reflect our new objective of min-RWA, which is to minimize the number of used
wavelengths to satisfy the given lighpath requests.
Following the same main characteristic of the approach of section 2.4.4, ours
also may be decomposed to both:
1. Routing sub-problem:
2. Wavelength assignment:
It should be noted that the search phase of the routing problem has been
changed to consider the multiple-fiber case as discussed in the above section.
Again, the selection phase of the routing problem along with the wavelength
assignment is formulated as an ILP and is solved for optimality. The solution of this
ILP determines which paths of the candidate paths for each request are used and a
wavelength is assigned for each of them.
The proposed model also shares most of the characteristics:
Min-RWA:
This is a variation made by modifying the objective function
Path-based model:
As inherited from the model
No wavelength conversion:
As inherited from the model
Multiple requests:
As inherited from the model
Multiple-fiber links:
In contrast with the basic approach, our proposed addresses the RWA problem
with multiple-fiber links, based on the above presented idea.
Wavelength continuity constraint is implicitly guaranteed because wavelengths
are assigned to entire paths rather than to individual links.
64
The objective function is based on the same idea of the approach proposed in
section 2.4.9 in the previous chapter (reference [20] ). This idea is to minimize the
total number of wavelengths used, by maximizing the wavelength re-use, as much as
possible, as long as the capacity constraints are not violated.
The ILP model of this approach is presented as follows:
Objective Function:
Minimize
1 C G
1xP
(3.1)
Wx1
Capacity constraint:
C B 1
Traffic demands:
m 1 C A
T
(3.2)
WxL
T
(3.3)
W
Integrality constraints:
m 0 , integer
c 0,1 , integer
i
ij
i=1,….,R
(3.4)
i= 1,….,P, j=1,…..,W (3.5)
where
R: denote the number of source-destination (s-d) pairs.
L: denote the number of links.
W: denote the number of wavelengths per link
m = {mi}, i=1,2….,R : number of connections to be established for source-destination
pair i
A={aij}: PxR (path- s-d pair incidence) matrix in which aij = 1 if path i is between
source-destination j, and aij =0 otherwise.
B={bij}: PxL (path-edge incidence) matrix in which bij = 1 if link j is on path i, and bij
=0 otherwise.
C={cij}: PxW (path-wavelength assignment) matrix in which cij = 1 if wavelength j is
assigned to path i, and cij =0 otherwise.
G={Gi}: 1xW weighting matrix.
The objective function as shown in equation (3.1) states that the objective is to
minimize the weighted sum of the Path-Wavelength assignment variables. This in fact
aims to minimize the total number of wavelengths used in the network. The logic
behind this is in the assigned weights: since low index wavelengths are given lower
weights, the objective forces the assignment of paths to the smallest possible set of
low index wavelengths this is achieved by re-using the same low index wavelengths
whenever possible (whenever it doesn’t conflict with the capacity constraints).
The capacity constraints in equation (3.2), traffic demand constraints in
equation (3.3) and integrality constraints in equations (3.4) and (3.5) are all
unchanged.
Parameters:
For the proposed formulation, some parameters may be used to refine the quality of
the solution:
The number of candidate paths: the larger the number of candidate paths, the
closer we get to the optimal solution, however, it shouldn't be increased much as it
increases the number of variables. The proper choice of this parameter reduces the
65
number of variables/constraints especially when there are some links that are
never used by any of the paths.
The number of assumed wavelengths: the increase of the number of available
wavelengths (from which we try to use as minimum as possible) ensures
feasibility, reducing this numbers may result in an infeasible solution. The upper
bound choice of this parameter is to equal the number of connection requests, a
better choice can greatly reduce the number of variables of the formulation.
The criteria of searching for candidate paths: The criterion to search for the set of
candidate paths between the required SD pairs in the routing sub-problem can be
selected from among the following:
o Link-disjoint paths (were paths must differ in all the links they traverse)
o Link-distinct paths (were paths must differ in at least one link)
Only the set of Link-disjoint paths is considered in this work for the following
reasons:
The set of link-disjoint path is most suitable to this specific problem on hand,
because if a certain link is congested, then we are sure this link is not shared
between the set of candidate paths (furthermore, at most only one candidate path
will use it), which gives the freedom of avoiding congested links.
In general for any network the total number of link-disjoint paths between any SD
pair is not large.
For a low number of candidate path such as two or three we can obtain the
required optimum value for the number of wavelengths
It greatly enhances the "survivability" or fault tolerance of the network, by
establishing connections on link-disjoint paths, ensures that with link failure, not
all the connections between any SD pair are lost.
Weighting matrix considerations:
There are a few considerations to take into account, when making the
appropriate choice for the weights of the weighting matrix used above. The selected
weights must satisfy the following requirements:
1. All weight must be integer, to maintain the required integrality of the
variables.
2. Weights must be linear, so that additional cost is added as more different
wavelengths are used.
3. Weights must be chosen to be monotonically increasing in such a way that
extra cost is added when a new wavelength is used in the system.
4. Weights must not be dramatically large as to maintain the model's stability.
To satisfy the above requirements, we may propose different choices for the
weighting matrix. First, we may choose to assign the same weights to all the
assignment variables of the same wavelength. Second, we select increasing costs for
the assignment variables of increasing index wavelengths.
One such choice, to ensure that a new wavelength is used is only used when
all the previous wavelengths can not be used due to constraint violation, is to choose
the weight of each new assigned wavelength to be greater than the upper bound value
of the case when all the previous wavelengths are assigned. Since for each wavelength
a total number of paths P can be assigned to it. The weight choice can be as follow:
66
G={Gi}: 1xW weighting matrix, Gi = Pi
It can be easily seen that such choice, requires very large weight values even for
moderate number of paths and wavelengths.
Another choice can be made based on the following facts:
Assuming that all the P paths can be assigned the same wavelength is an extreme
and unpractical case.
The path-wavelength assignment variables selection are further constrained by
the traffic demand constraint, for each demand.
To explain the second point, let us focus on the traffic demand constraint. Rewriting this constraint in summation form:
W
m
j
i 1
P
c ki a kj
k 1
j 1, 2,...R
In general, the number of path-wavelength assignment variables (representing
the different path-wavelength combinations) is greater than the number of connection
requests m j for each SD pair j (or else the problem would turn out to be infeasible).
Only a number equal to
m
j
variables would be set (assigned the value of
one) and the others must be unset (assigned zero value)
Lemma 1:
For the previously proposed model, at optimality, the traffic demand must be satisfied
at equality.
Moreover, using any monotonically increasing weights for the increasing index
wavelengths will ensure that the minimum number of wavelengths is used.
Proof:
We will base our proof on contradiction. Let us assume that optimality has been
reached and the minimum possible objective function value is calculated. Also
assume that more than m j assignment variables are set.
Consider unsetting the extra number of assignment variables (above the traffic
demand m j ) we can proof that this can be done without violating any of the
constraints:
Observing the available constraints in the model, namely:
The traffic demand constraint:
W
m
j
i 1
P
c ki a kj
k 1
j 1, 2,...R
This means that this constraint is satisfied at inequality. By unsetting those
extra assignment variables the right hand side will be decreased and this
constraint can be still satisfied at equality.
The capacity constraint:
P
c kib kj 1
k 1
i 1, 2,...W , j 1, 2,...L
for those extra assignment variables, this constraint was satisfied at equality.
67
Again, by unsetting them this constraint can be still satisfied but this time at
equality.
Thus, the extra assignment variables can be unset without violating any
constraints, reaching a lower value for the objective function. This is a violation of
our previous assumption of optimality.
At this point we have proved that an exact number of assignment variables
equal to m j is set. To prove the second part of the lemma, we only need to show that
assignments are always made to the lower index wavelengths as long as the capacity
constraint is not violated.
Notice that for each traffic demand, the extra path-wavelength assignment
variables must be unset. As long as the capacity constraint is not violated, all the
assignment variables are equally weighted in the traffic demand constraint. The
optimizer must select those assignments to the higher index wavelengths in their order
of decreasing weights to be unset so as to minimize the total objective function value.
Otherwise, if any other choice is made we will reach a contradiction as in the previous
argument.
Based on the above lemma, any monotonically increasing weights for the
increasing index wavelengths such that:
(3.6)
Gi1< Gi < Gi1 i 1, 2,...W
1
(notice the strict inequalities) is sufficient to ensure the correct performance of our
model.
G
0
3.2.3. Solution uniqueness and Shortest paths preference:
Another feature in our proposed model is the possibility to favor shorter paths
in the selection process. This means that whenever two paths could be equally
selected to reach the same optimal value for the objective, the shorter one can be
favored to be selected. More precisely, even if the two paths are of same length, the
path of lower index in the pre-calculated K-Shortest path list is favored.
This is a quiet desirable feature in communication networks in general, since
shorter path directly maps to lower delays, lower possibilities of interference and
lower probability of failure. An example illustrating this feature is shown in Figure
32. Assuming there are 3 connection requests (in terms of lightpaths) from node 0 to
node 3, from node 1 to node 3 and from node 1 to node 2.
68
1
0
1
0
2
3
2
3
(a)
Lightpath on 1
Lightpath on 2
(b)
Requests:
0 to 3
1 to 3
1 to 2
Figure 32: two optimal solutions for an example RWA problem
This feature can be fairly easy accomplished through a proper choice of the
weights in the weighting matrix used in the objective function of our proposed model.
This is possible since we have proved in the lemma 1 above, that we have the freedom
to choose any weights satisfying the simple condition of (3.6).
Our proposed weights can be then set as follows:
3.3.
Network growing problem:
In addition to the above proposed model, in this section we discuss a new
arising problem and present a solution based on the above model as a framework.
A new practical problem that arises in the domain of optical networks design
as an extension of targeted problem of RWA is the case where the available resources
of the network can not satisfy the connection requests and it required to "grow" the
network in order to accommodate the requests.
As in the RWA problem, this problem can be formulated as follows:
Given the network topology, and a list of connection requests.
When the current network topology and resources does not satisfy the demanded
requests, it is required to obtain the minimum set of modifications (in terms of
additional resources) on the current network topology in order to satisfy the
69
connection requests.
The terms network "growth" and network "modification" are rather vague in
the above discussion. In what follows, we present our suggestion of a solution for the
problem. This can be expressed in terms of our definition of the possible modification
on the current network topology. The assumption made to incorporate this problem in
our framework, is that the suggested modifications are only the addition of fibers to
already existing links and we will not consider the addition of totally new links
between originally un-connected nodes.
This assumption is of reasonable practical value due to its economical
advantage; in practice it is of less cost to add more fibers (in a bundle) to already
existing links rather than to construct new links. Moreover, multi-fiber links networks
are gaining a lot of interest recently [10] .
In our proposed model the number of available wavelengths for use is a
parameter to the model. The problem under consideration arises when this number
can not accommodate the requests.
Following theses steps we can find the required solution problem:
1. The problem is first solved as previously.
2. If the problem is found to be feasible, then we have reached optimality and the
minimum number of wavelengths is reported.
3. Otherwise, the problem is infeasible; this means that the available number of
wavelengths is not sufficient. This is the network growing problem case. In this
case we Re-solve the problem with a larger number of wavelengths (we typically
used the maximum possible number, the worst case one, which is equal to the
number of connection requests).
4. The modified problem must be feasible (since we used the maximum possible
number of wavelengths), we then calculate the required modifications to the
network topology as follows:
After the 2nd run, we calculate the required number of wavelengths used for
each link, if this number exceeds the constrained number we started with and that can
not be carried on by any (if available) multiple fibers between the same nodes, a
suggestion is made to add a mutli-fiber link between these two nodes (please note that
the number of links to be added is proportional to the number of waves needed, since
each link can carry a specified number of waves as stated in the model). All other
non-congested links are left unchanged.
The above can be further explained using the following pseudo code (Figure
33):
/*Values obtained from the 2nd run */
W = the number of available wavelengths per link.
W(L) = the needed number of wavelengths on link L
For each node pairs (i,j)
For each link Lij (between the nodes (i,j)
If (W (Lij) < W ) freeWaves = freeWaves + W-W(Lij)
EndFor
70
For each link Lij (between the nodes (i,j)
If ((W (Lij) > W ) && ( freeWaves < W(Lij) – W) )
Fibers to add = ceil ((W(lij)-W-freeWaves)/W)
EndFor
EndFor
Figure 33: pseudo-code to calculate needed multi-fibers in network growing problem
The complete flow to accommodate the network growing problem in our
framework, is presented by the following flow chart diagram (Figure 34).
Start
Read input
data from file
Build the LP model
Solve the model
No
Yes
Feasible?
Build new model with worst
case no. of wavelengths
Solve the model
Calculate modifications
Report
solution
End
Figure 34: flow chart diagram for accommodating the network growing problem.
71
3.4.
Total Unimodularilty Property:
Some problems have special structure that allows an ILP to be solved exactly
under its relaxation as an LP. This is significant because LP problems can be solved
much more quickly than ILP problems. One way of thinking about such problems is
that the constraint matrix has a structure that in effect traps the optimal solution onto
discrete values if the RHS constants are themselves integer. The relevant
mathematical property is called Total Unimodularilty (TU).
Theorem 1:
"Let A be a totally unimodular matrix and b be an integral vector then the polyhedron
P:={x|Ax <=b} is integral"2
This theorem clearly stated the great use of such property. If the constraint
matrix is proven to be TU, one can directly solve ILP models with TU constraint
matrix as its LP relaxed version and get required optimum integral values.
Many definitions have been established for the TU property3:
Definition 1:
"A (n x m) matrix is totally unimodular if the determinant of each of its square
submatrices is 1,-1, or 0"
Theorem 1:
"A matrix is TU if and only if each arbitrary collection of its rows can always be split
into two parts such that the sum of the rows in one part minus the sum of the rows in
the second part is a vector with entries -1, 0 or +1"4
Special studies focused on the Network Flow problems, proved that the NodeArc incidence matrices of network flow models are totally Unimodular. (5, 6)
2
Hoffman,A.J, and Kruskal, J.B, "integral boundary points of convex polyhedra", in: Linear
Inequalities and Related Systems (H.W Kuhn and A.W Tucker editions), Princeton Univeristy Press,
Princeton N.J, 1956
3
"Theory of linear and integer programming, Alexander Schrijver, John Wiley 1998
and "Mesh-Based survivable Networks Options and strategies for optical MPLS, SONET, and ATM
Networking", by Wayne D.Grover. TRLabs and the university of Alberta.
4
Ghouila-Houri, "caractérisation des matrices totalement unimodulaires", comptes Rendus
Hebdomadaire des Séanes de l'Académie des Science (Paris) 1962
5
Dantzig, G.B, and Fulkerson, D.R, "on the max-flow min-cut theorem of networks", in: Linear
Inequalities and Related Systems (H.W Kuhn and A.W Tucker editions), Princeton Univeristy Press,
Princeton N.J, 1956
72
3.5.
Proposed Solution Technique "TU-Based integrality
relaxation":
In addition to the above-proposed models, a new solution technique is
proposed that can be used with both models and different models as well (as long as
they satisfy the detailed conditions discussed below). However, it should be noted that
is technique is applicable for the above models, when the link-disjoint criterion for
searching for candidate paths is used only.
The solution technique called "TU-Based integrality relaxation" relies
primarily on the fact that the constraints form a matrix that is proven to be "Total
Unimodular" (TU). To prove our assumption, we will only depend on the basic
definition and theorems of TU property, along with observation made on the special
structure of the constraints matrix of our model.
The constraints we refer to are the capacity constraints and traffic demand
constraints.
Capacity constraints
This constraint can be rewritten in the following form, instead of the matrix
form to decompose it into a group of individual constraints on each link:
P
c kib kj 1
k 1
i 1, 2,...W , j 1, 2,...L
(0.1)
This constraint ensures that for all the paths flowing over a certain link for a
certain wavelength are not all active, rather only one path can occupy this wavelength
over this link. This constraint is repeated for each link for all the available
wavelengths.
From the structure of the B matrix which defines PxM incidence matrix and
our calculation of only edge-disjoint paths, we can deduce the following:
Any 2 paths for the same request will never share the same link. This is clear in
the B matrix when any 2 paths for the same request can never have the same
columns. In terms of the above summation representation, paths of the same
request will never have the same b kj coefficients.
In addition, any 2 different paths (for even different SD pair connection request)
will never use the exact paths (since they have to join different end points). In the
B matrix any such paths must have different columns. In other words, this means
that they can never have the exact set of b kj coefficients.
The Right Hand Side, RHS, of the constraints is always constant and fixed to 1.
Traffic demand constraints
Again rewriting this constraint in the following form, instead of the matrix
form to decompose it into a group of individual constraints for each request:
6
Heller, I. and Tmpkins, C.B, "an extension of a theorem of Dantizg's", in: Linear Inequalities and
Related Systems (H.W Kuhn and A.W Tucker editions), Princeton Univeristy Press, Princeton N.J,
1956
73
W
m
j
P
c ki a kj
k 1
i 1
j 1, 2,...R
(0.2)
This constraint ensures that the sum of the wavelength assigned paths to a
certain connection request (between SD pair) pair must be at least satisfy the
requested number of connections for it, m j . This actually a group of constraints that
are formed for each connection request (between the same SD pair)
As described the A which defines PxR incidence, we should notice the following:
All the paths that are calculated for the same SD pair will have the same column
in the A matrix. In terms of the above summation representation, paths of the
same request will all have the same a kj coefficients
=
1 if "j" is the request they are calculated for
0 for all other requests
In addition, the RHS of the constraints is always integer and reflects the number
of connection requests between the same SD pair.
To illustrate our observations on the special structure of the model and how they will
lead to our prove of Total Unimodularity, let us present a small example of a simple 3
nodes, 2 links network and 2 connection request.
0
1
2
With only 2 connection requests
Request from 0 1 and from 0 2
And only 2 wavelengths available, and we have calculated one path for each request
(no more than one edge-disjoint path can be found in this network)
The pre-calculated paths should be:
Req#0[ 0 -> 1 ]
Path#0: 0 -> 1
Req#1[ 0 -> 2 ]
Path#0: 0 -> 1 -> 2
The matrix shown below is the main matrix of the model since it incorporates
all the body-constraints of the model: namely the capacity constraints and the traffic
demand constraints.
To show different constraints in the matrix we have used to labels to refer to
different parts of the matrix:
Paths for m0 W
Paths for m1
W
R0_1P0@W1 R0_1P0@W2 R0_2P0@W1 R0_2P0@W2 RHS
Links
W
L0_1@W1
1
0
1
0
1
74
Requests
L0_1@W2
0
1
0
1
1
L1_2@W1
0
0
1
0
1
L1_2@W2
0
0
0
1
1
m0
1
1
0
0
1
m1
0
0
1
1
1
SRM
In general the columns of the matrix represent the
c ij variables of the model,
these are the different paths calculated for the whole model, where each may be
assigned any of the available wavelengths. Paths for the same SD pair are grouped for
illustration purposes. We have arbitrary named these variables according to the SD
pair they join, their number in the candidate path list, and the wavelength they use:
R<S>_<D>P<pathno.>@W<waveno.>
The last column only specifies the Right Hand Side RHS of each constraint,
and will be explained for each constraint.
On the other hand, the rows of the matrix represent the different constraint
equations. We have given labels to each constraint for ease of reference.
Capacity Constraints:
These constraints for our sample network model form the top 4 rows of the
presented matrix, where each row corresponds to the capacity constraint of one of the
wavelengths on a certain link. Constraints are arbitrary named according to the links
and wavelengths they refer to: L<S>_<D>@W<waveno.>
Traffic demand Constraints:
These constraints for our sample network model form the bottom 2 rows of the
presented matrix, where each row corresponds to the traffic demand of the connection
requests between different SD pairs. It should be noticed that multiple requests
between the same SD pairs don't add any more constraints (or rows), simple the RHS
of the constraints reflects the number of connections required to be established.
Constraints are simply named according to the m j connection they refer to.
To review our observation over these constraints again for our sample
network:
Paths for the same connection requests don't share the same links, they have
completely different columns. In the statement we also mean paths flowing on
different wavelengths, since both of the paths and links are repeated by the
number of available wavelengths which is the essential part of the Wavelength
Division Multiplexing WDM.
Paths for different connection requests may share the same links, but they still
have different columns. Since they must join different end points.
75
The rows for the traffic demand constraints, contains elements that equal to 1 for
the paths that can satisfy the request and 0 otherwise.
Now let us focus on the smaller matrix formed only by those columns of one
request, to study the structure of the main constraints matrix as composed of different
such matrices, namely single request matrices, we observe the following:
1. Paths have completely different columns (since they are link-disjoint) and must
consider different wavelengths. In other words, a link is never used more than
once, hence, in each row there exists at most one non-zero element.
2. The traffic demand constraint row all the paths (they all satisfy our single request
now) have entries equal to One.
Based on all the above observations we will prove the TU property for the
"constraints matrix" starting by proving the "single request matrix" (SRM) is. The
single request matrix is merely the constraints matrix formed if there is only one
connection request in the problem.
Proof:
Our proof is developed by induction on the number of connection requests
(between different SD pairs). We have seen that the main constraints matrix grows
with the number of different connection requests. We will first study and proof the
TU property for its basic constructs, which is the single request matrix, then complete
our proof for any number of requests.
Lemma 2:
"The single request matrix of our proposed model is TU".
Proof:
We have to consider the following 2 cases:
Case1:
Let us first consider all the square sub-matrices of the SRM not including the
row of the traffic demand constraint.
Let us assume that such matrix S of dimensions nxn, then
n
det( S ) (1)
k 1
k j
S kj det( S ( kj ) ) , where j is any row used to calculate the determinant
( kj )
and ( S ) is the matrix resulting from removing the k'th column and jth row. We
know that only one non-zeros element exists in any row (from above observations), in
other words only one S kj will be non-zeros in the summation. For the sub-matrices
determinants, in the limit they will only be a one element matrix which is either 0 or
1, contributing in the resulting larger matrix determinant of either -1, 1, or 0,
depending on the sign in the summation. Hence, by definition all such sub-matrices
are TU.
Case 2:
The square matrix we consider contains entries from the traffic demand
constraint row (this is an all One's vector).
In this proof we will use the above mentioned theorem 2. Our goal now is to prove,
76
that we can always find a partition such that the difference between the sum of the
rows for each group forms a difference vector with entries only -1,1 or 0
Let us start initially by the following partition:
The 1st group contains the traffic demand constraint row, which is an all-One
vector.
The 2nd group contains all the other capacity constraint rows.
For simplicity and without loss of generality, let us only consider the
difference between the 1st group and the 2nd.
To reach our required difference vector, we will move rows from the 2nd group
to the first. To show how this movements satisfies the requirement; consider at any
step a difference vector having entries not all conforming to the desired values of only
-1,1 and 0. In this case, we will move rows from the 2nd group to the first that lead us
to the required balance at each entry separately, and then repeat that same step for
each non-conforming entry.
This is feasible, since from our observation, each rows contains at most one
non-zero element and all the columns are exclusively different.
Our final difference vector will be a vector with entries that equal either 1 or 0 only,
because we will add up elements to the 1st row.
From theorem 2, this proves that the SRM is TU.
Step:
Now we assume that the main constraint matrix is in fact TU for a number N
of requests and it is required to proof that is it TU for number of requests of N+1.
Lemma 3:
"The body constraints matrix in our proposed model is TU".
Proof:
Any square sub-matrix of the general main constraint matrix can fall into one
of the following cases:
Case 1:
Completely fall into one of the SRM, which are already proven to be TU from above.
Case 2:
The sub-matrix covers columns from different connection requests.
This case is a little complex than the previous one in the following aspects:
Paths of different connection requests are no longer link-disjoint, but they still
have to be different as they join different end-points. In other terms, a link may be
used more than once for different paths, or more than one entry can be non-zero in
each row. It should be noted that this is the general case.
There exists, a number of traffic demand constraint rows.
Again, following the same argument in the previous proof (for the 2nd case)
and theorem 2, we initially partition the rows into 2 groups:
The 1st group contains the traffic demand request rows, which together form an
all-One vector; this group will be empty if the matrix doesn't cover the request
rows.
77
The 2nd group contains all the other capacity constraint rows.
As previously, we will only consider the difference between the 1st group and
the 2nd for simplicity and without loss of generality.
As long as we don't reach the required difference, we add rows from the 2nd
group to the other. The main difference in this case, is the any row can have more
than a single non-zero element. This means that in this case we can affect more than
one entry in the difference vector this time, this can be desirable in some cases, but we
still have the freedom to affect only one of the entries due to the fact that the path
columns can never be repeated (either in the same request or over multiple requests).
Affecting only one of the entries is sufficient since we have the freedom to reach the
difference vector with entries -1, 1 or 0 and not necessarily only 1 or 0 as in the
previous proof.
This ensures that we can always have the right move from one group to the
other to reach the required difference vector.
According to theorem 2, we have now proven that the body-constraints matrix
of our proposed model is TU.
With these proofs we conclude the validity of our proposed solution technique.
4.
Chapter 4
Experimental Results
In this chapter we will provide the performance analysis and experimental
results of our proposed model, it associated "TU-Based integrality relaxation"
solution technique and their performance in comparison with another recent solution
technique for the same problem.
4.2.
Performance evaluation:
We have classified our performance tests into main categories:
1. Direct model implementation: the performance of our proposed model when
varying different parameters.
2. Applying the proposed solution technique: the performance of our proposed when
the "TU-based integrality" solution technique is applied under varying parameters.
3. Proposed solution versus recent one: the performance of our proposed model and
associated solution technique versus a recent technique addressing the same
problem
Each of these categories may contain sub-sections describing the model and
solution technique performance when varying input parameters.
78
4.3.
Test setup:
We have developed a variety of network models for the testing purpose.
Instead of running our tests on random generated networks with different parameters,
we chose to run our tests over a variety of network models ranging from small to large
and realistic network models that simulate practical problems. This way we ensure
covering most of the typical and corner cases.
These models include:
o RWA4 ( 4 nodes, 8 links, 4 requests)
o RWA7 ( 7 nodes, 18 link, 9 requests)
o Ring5 ( 5 nodes, 10 links, 6 requests)
o Modified Ring ( 5 nodes, 5 links, 5 requests)
o NSFnet ( 14 node, 42 link, 15 requests )
o Cost239 ( 11 nodes, 46 links, 20 requests)
Each one models a different abstract network in terms of its network size
(number of nodes and links) as well as its topology. When viewed as an RWA
problem each has a different input parameter that specifies the connection requests to
be satisfied.
In our tests, we will provide the results based on these different models for
their typical parameters and other tests for specific network models when varying
input parameters or model parameters to deduct the effect of this variation on the
performance too.
4.4.
Performance metrics:
For the purpose of the tests, the most important and obvious performance
metrics will be:
o The objective function value: the calculated objective function is a direct measure
of the effectiveness of the algorithm to calculate the optimum value
o The timing complexity: the total elapsed time to calculate the optimum objective
value. Note that this time includes the time for candidate path calculations and the
time of the simplex solver.
o The total number of iterations: another complexity metric, more precise than the
timing one, that points the total number of simplex iterations used to obtain the
minimum objective value.
As a general note, the timing complexity measure might not be always as
accurate as desired and is highly depending on the machine resources, running tasks
… etc, but is used whenever required to illustrate a point. In many of the cases when
the elapsed time is lower than the current timing calculations the value "<Res" is used
instead. The number of iterations is more precise and can be a good base for
comparison.
The data provided in our test runs may vary if any of the problem or model
parameters have been slightly varied. We carefully stated all the involved parameters
for any of the performance study tests.
4.5.
Direct Model implementation:
79
In this section, we will study the performance of the proposed model when
directly implemented (without relying on the solution technique to eliminate the
integrality constraints). The performance shall be studied under the effect of varying
the input parameter to the RWA problem: the number of connection requests and
different model parameters as the number of calculated candidate paths or the number
of available wavelengths.
Variable number of requests:
In this test we will vary the number of connection requests for the same
network model and observe the variation in the objective function value along with
the performance metric elapsed time and number of total simplex iterations needed.
We will run the tests for the one of the network models, for example, NSFnet
network. We should note that the model parameters, such as the number of candidate
paths and the number of available wavelengths will be fixed to certain numbers
according to the test.
First, we will assume that all the connection requests are for single
connections between the same SD pair and we will increase the number of requests by
adding new requests (between new SD pairs). The number of candidate paths will be
fixed to 2 for all the tests except for the last one and the number of available
wavelengths would be set to 2 for all the tests except the last one where it was
increased to 3 .
Requests#
2
4
6
8
10
15
20
Objective
1
1
2
2
2
2
3
Iterations#
2
7
19
26
23*
74
243
Time(msec)
<Res
<Res
<Res
<Res
<Res
50
60
NSFnet network, varying requests
Second, we will increase the number of requests by increasing the number of
connections requested between the same SD pairs. We will increase the multiplicity
of requests over a basis of 5 different SD pairs. Again, this time we run for the for
candidate paths set to 2 for the first two tests and increased to 3 for the rest tests. Also,
the number of available wavelengths would be set to as minimum as possible to reach
feasibility.
Requests#
5
10
15
20
Objective
2
3
4
6
Iterations#
11
24
44
74
Time(msec)
<Res
50
60
60
NSFnet network, varying requests
80
From the above results, we notice that the number of iterations and total time
needed to calculate the output values rapidly increases with the number of connection
requests, which is a reasonable fact since the RWA problem is an NP-complete one.
However, it should be noted that by increasing the number of connection
requests through increasing the multiplicity of existing ones the number of iteration
and time elapsed is considerably lower than the previous case. This means that the
proposed formulation accommodates the multiple requests case in an optimized
manner.
Another observation , is the increasing number of wavelengths needed to
accommodate the requests in the 2nd case, this is mainly due to the fact that these
requests would all share and compete for the same set of paths or at least links
(whether the case link-disjoint or link-distinct paths). This directly means more
wavelengths needed to respect the wavelength clash-free constraint.
A worth noting observation, is the fact that for some cases even the number of
connection requests increase the number of iterations might not scientifically increase
or even decrease. This can be explained in the light of the Branch and Bound (B&B)
algorithm performance. In these cases, an integral solution is reached faster with
fewer iterations consumed in the Branch and Bound tree.
Variable number of candidate paths:
Through this test we will vary the number of calculated candidate paths for
each of the connection requests (link-disjoint paths) for the same network model and
same number of requests and study the variation in the objective function value along
with the performance metrics: elapsed time and number of total simplex iterations
needed.
We will run the tests for the one of the network models, for example, Cost239
network, which generally posses a higher connectivity ratio in our test models.
For our runs, we will fix the number of requests and the number of available
wavelengths is set to 2 in the first case and 3 in the 2nd and that is the actual optimum
number needed respectively.
Paths#
1
2
3
4
5
Objective
2
1
1
1
1
Iterations#
14
17
20
39
39
Time( mSec)
<Res
<Res
50
50
50
Cost239 network, 10 requests, varying candidate paths
Paths#
1
2
3
4
5
Objective
3
2
2
2
2
Iterations#
31
48
75
82
82
Time( mSec)
<Res
50
60
60
60
81
Cost239 network, 20 requests, varying candidate paths
According to these tests we could summarize the effect of varying the number
of candidate paths, as previously discussed, as follow:
For a low number as 2 or 3 we reach the required optimum value, while a low number
of candidates may generate a false number of needed wavelengths (notice that the
objective function value decreased from 2 to the optimum value of 1 in the first table
for example).
On the other hand, the number of iterations needed directly increases with the
number of candidates and by increasing it above its limit can add an unneeded
calculations and computational effort.
The number of link-disjoint candidate paths in a general network s relatively a
small number (compared for example to link-distinct paths) which is only 4 for the
Cost239 network but it is sufficient to reach the required optimum.
Variable number of available wavelengths
In this test we will study the effect of varying the number of available
wavelengths for use for a sample network model on the objective function value and
the general performance measured by the number of iterations count and elapsed time.
We will run our tests on the cost239 network model with 20 requests and 2 candidate
paths:
Wavelengths#
1
2
3
4
Objective
Infeasible
2
2
2
Iterations#
Infeasible
46
48
44
Time( mSec)
<Res
<Res
50
<Res
Cost239 network, 20 requests, varying number of wavelengths
As shown in the table, the number of available wavelengths must be
sufficiently large to ensure feasibility, and by increasing it doesn't considerably affect
the complexity of the problem. Please note that increasing the number of variables in
the model which can affect the computations depending on the request set.
82
REFERENCES
[1] Biswanath. Mukherjee, "Optical communication networks", McGraw-Hill
Publishers, 1997
[2] J.Fang and A.K.Somani. "IP Traffic Grooming over WDM Optical Networks", 9th
Optical Network Design and Modeling 2005 Milano, February 2005
[3] M. A. Ali,A. Shami,C. Assi, Yinghua Ye, Russ Kurtz ,"Architectural Options for
the Next-Generation Networking Paradigm: Is Optical Internet the Answer?",
Department of Electrical Engineering, City College of the City University of New
York, August 2000
[4] Micheal S.Borella, Jason P.Jue, Dhritiman Banerjee, Byrav Ramamurthy, and
Biswanath Mukherjee, "Optical Components for WDM Lightwave Networks",
Proceedings of the IEEE, Vol. 85, No. 8, August 1997.
[5] K. Zhu and B. Mukherjee, “A Review of Traffic Grooming in WDM Optical
Networks: Architectures and Challenges," Optical Networks Magazine, vol. 4, no. 2,
March/April 2003.
83
[6] A.E. Ozdaglar, D.P. Bertsekas, “Routing and Wavelength Assignment in Optical
Networks”, IEEE/ACM Transactions on Networking, vol. 11, no. 2, April 2003.
[7] H. Zang, Jason. P. Jue, and B. Mukherjee, “A Review of Routing and Wavelength
Assignment Approaches for Wavelength-Routed Optical WDM Networks,”
SPIE/Baltzer Optical Networks Magazine (ONM), vol. 1, no. 1, January 2000.
[8] B. Ramamurty and B. Mukherjee, "Wavelength conversion in WDM networking",
IEEE Journal Selected Areas in Communications, September 1998.
[9] X. Jia, D. Du, X. Hu, H. Huang, and D. Li, “Placement of Wavelength Converters
for Minimal Wavelength Usage in WDM Networks”, IEEE INFOCOM'02, New
York, June 2002.
[10] Mohamed Saad, Zhi-Quan Luo, "On the Routing and Wavelength Assignment in
Multifiber WDM Networks", IEEE Journal on Selected Areas in Communications
(special series on optical communications and networking), vol. 22, no. 9, November
2004.
[11] J. S. Choi, N. Golmie, F. Lapeyrere, F. Mouveaux, and D. Su, “A functional
classification of routing and wavelength assignment schemes in DWDM networks:
Static case,” Optical Communication and Networks, January 2000.
[12] D. W. Matula, G. Marble, and J. D. Isaacson, “Graph coloring algorithms,” in
Graph Theory and Computing, R. C. Read, Ed. New York and London: Academic,
1972.
[13] D. Banerjee, and B. Mukherjee, “A practical approach for routing and
wavelength assignment in large wavelength-routed optical networks," IEEE Journal
on Selected Areas in Communications, Vol. 14 No. 5, 1996.
[14] P. Raghavan and C. D. Thompson, “Randomized rounding: A technique for
probably good algorithms and algorithmic proofs,” Combinutorica, vol. 7. no. 4,1987
[15] LP_solve, Mixed Integer Programming (MIP) solver, available on:
lp_solve http://groups.yahoo.com/group/lp_solve/
LPSolve IDE 5.5 http://www.progdigy.com/
[16] D. S. Hochbaum, A. Pathria, “Analysis of the Greedy Approach in Problems of
Maximum k-Coverage”, Naval Research Quarterly, vol.45, 1998.
[17] R. Ramaswami and K. Sivarajan, “Routing and wavelength assignment in alloptical networks”, IEEE/ACM Trans. Networking, vol. 3, October 1995.
[18] R.M. Krishnaswamy, K.N. Sivarajan, “Algorithms for Routing and Wavelength
Assignment Based on Solutions of the LP-Relaxation”, IEEE Communications
Letters, vol. 5, no. 10, October 2001.
84
[19] Pallavi Manohar, D. Manjunath, and R. K. Shevgaonkar, “Routing and
Wavelength Assignment in Optical Networks from Edge Disjoint Path Algorithms”,
IEEE communication letters, Vol. 6, No. 5, May 2002
[20] J. M. Kleinberg, “Approximation algorithms for disjoint paths problems”, Ph.D.
dissertation, MIT, Cambridge, May 1996.
[21] L. H. Sahasrabuddhe and B. Mukherje,"Light-trees: Optical multicasting for
improved performance in wavelength-routed networks". IEEE Communications,
February 1999.
[22] A. Baveja, A. Srinivasan, “Approximation Algorithms for Disjoint Paths and
Related Routing and Packing Problems”, Mathematics of Operations Research, vol.
25, no. 2, May 2000.
[23] D. G. Cantor and M. Gerla, “Optimal routing in a packet-switched computer
network,” IEEE Transaction Computer., vol. 23, October 1974.
[24] ILOG CPLEX 7.1 User’s Manual, ILOG, March 2001.
[25] Saurabh Mittal, "Implementation of K-Shortest path Dijkstra algorithm used in
All-Optical data communication networks", March 2004.
[26] Yuanyuan Yang, and Jianchao Wang, "Cost-Effective Designs of WDM Optical
Interconnects", IEEE transactions on Parallel and distributed systems, Vol 16, no. 1,
January 2005.
[27] I.Chlamtac,A.Ganz,and G.Karmi, “Lightpath Communications:An Approach to
High Bandwidth Optical WAN’s,”IEEE Transactions on Communications , vol.40,
no.7, July1992.
[28] Christiane Dzongang, Philippe Galinier, and Samuel Pierre, "A Tabu Search
Heuristic for the Routing and Wavelength Assignment Problem in Optical Networks",
IEEE Communications letters, Vol. 9, No. 5, May 2005.
[29] Wayne D.Grover, TRLabs and the University of Alberta, "Mesh-Based
survivable Networks Options and strategies for optical MPLS, SONET, and ATM
Networking", Prentice Hall 2004.
[30] Steven S. W. Lee, Maria C. Yuang, Po-Lung Tien, and Shih-Hsun Lin, "A
Lagrangean Relaxation-Based Approach for Routing and Wavelength Assignment in
Multigranularity Optical WDM Networks", IEEE Journal on Selected Areas in
Communications (special series on optical communications and networking), vol. 22,
no. 9, November 2004.
[31] M. Guignard, “On solving structured integer programming problems with
Lagrangean relaxation and/or decomposition”, in Proc. IEEE Decision and Control,
December 1989.
85
[32] R. Malli, X. Zhang, and C. Qiao. "Benefit of multicastsing in all-optical
networks". In Proceedings of SPIE, volume 3531, November 1998.
86