Ranging Protocols and Network Organization
advertisement

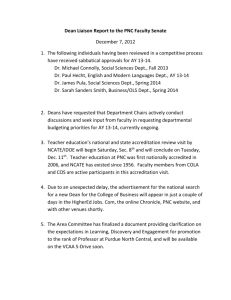
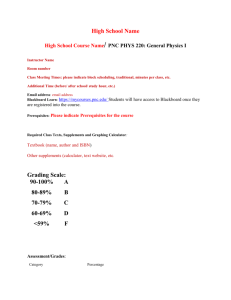
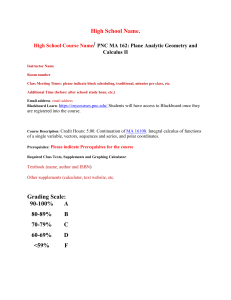
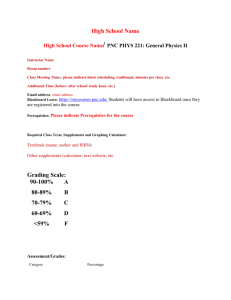
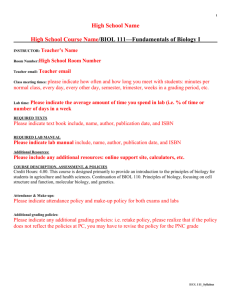
August, 2004 IEEE P802.15-04/427r0 IEEE P802.15 Wireless Personal Area Networks Project IEEE P802.15 Working Group for Wireless Personal Area Networks (WPANs) Title Ranging Protocols and Network Organization Date Submitted 10 August 2004 Source Benoit Denis Voice: Fax: E-mail: CEA-LETI DCIS/SMOC/LCARE 17 rue des Martyrs F 38054 Grenoble cedex 9 FRANCE (33)(0)4 38 78 58 11 (33)(0)4 38 78 51 59 denisbe@chartreuse.cea.fr STMicroelectronics Broadband Wireless LAN Group Advanced System Technology 39, ch. du Champ des Filles CH - 1228 Plan-les-Ouates SWITZERLAND Re: TG4a Ranging Subcommittee Contribution Abstract This submission describes the impact of network protocols on ranging. Purpose In support of TG4a Ranging Subcommittee work. Notice This document has been prepared to assist the IEEE P802.15. It is offered as a basis for discussion and is not binding on the contributing individual(s) or organization(s). The material in this document is subject to change in form and content after further study. The contributor(s) reserve(s) the right to add, amend or withdraw material contained herein. Release The contributor acknowledges and accepts that this contribution becomes the property of IEEE and may be made publicly available by P802.15. Submission Page 1 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 Table of Contents INTRODUCTION ________________________________________________________________________ 2 CLASSICAL RANGING TRANSACTIONS ___________________________________________________ 3 POSSIBLE EMBODIMENTS FOR UWB LOCATION SYSTEMS ________________________________ 5 RANGING TRANSACTIONS AND COMMUNICATION STANDARDS: THE IEEE 802.15.3 EXAMPLE ________________________________________________________________________________________ 8 PNC TO DEV RANGING ____________________________________________________________________ 8 General Transactions _______________________________________________________________________ 8 Ranging Errors from Relative Clock Drifts and Response Delays ____________________________________ 10 Single TOF Estimation ..................................................................................................... 11 Joint DEV’s and PNC’s TOF Estimations ........................................................................ 13 Time stamp ______________________________________________________________________________ 13 DEV TO DEV RANGING ___________________________________________________________________ 15 General Transactions ______________________________________________________________________ 15 Ranging Errors from Clock Drifts and Synchronization Offsets _____________________________________ 16 REFERENCES __________________________________________________________________________ 17 Introduction The purpose of this document is to make a brief description of classical time-based ranging transactions. It highlights the main challenges that must be overcome in terms of synchronization requirements, network organization and protocols. Concepts will be illustrated with few examples (corresponding to existing UWB localization systems related in the literature). Finally, the adaptation of these ranging techniques to communication standards will be discussed with the IEEE 802.15.3 example. This contribution can be viewed as a complement for the document IEEE 802.15-04/418r0, and is specifically offered to the 802.15.4a Ranging Subcommittee as a basis for further discussions on the protocol hooks that must be provided in support of various ranging and location techniques. Submission Page 2 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 Classical Ranging Transactions Classical ranging transactions (namely the Two Way Ranging -TWR- and the One Way Ranging -OWR- schemes), and the corresponding synchronization requirements, are highly dependant on the communication protocol and the network topology. The first technique enabling to measure the signal round-trip Time-Of-Flight (TOF) between two asynchronous transceivers consists in using a classical two-way remote synchronization technique. A pair of terminals are time-multiplexed with half-duplex packet exchanges. This procedure relies on a typical mechanism for fused location and communication ([1][2][6][8]): a requestor sends packets to a responder which replies after synchronizing with packets containing synchronous timing information. The reception of this response allows the requestor to determine the round-trip TOF information (C.f. Figure 1). This solution seems to be particularly adapted for distributed networks (a fortiori in the lack of coordination). Tround TOF A B TOF Response Delay Preamble Acquisition Header Channel Communication Acquisition Payload Synchro H Transmitted packets Received packets Elapsed times measured by the system Figure 1: Two Way Ranging (TWR) transaction enabling to estimate the round-trip Time-OF-Flight between two asynchronous terminals (feeding TOA-based positioning algorithms) Now, if two terminals are synchronized to a common clock (i.e. sharing the same time reference and time base), it is clear that the TOF information can be directly obtained from a simple OWR transaction (not detailed here). The two previous transactions provide so-called TOA location metrics corresponding to the relative distance between terminals. Submission Page 3 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 Another possible transaction consists in forming a difference of TOAs at a couple or reference terminals. The resulting TDOA can be obtained through OWR transactions (C.f. Figure 2). In this scheme, a pair of isochronous terminals (viewed as anchors) preliminary detect the TOA associated with packets emitted by the mobile. The TOAs are estimated relative to a common reference time (shared among references) but independent on the actual transmission time. Anchors have to be re-synchronized with an external clock or by a beacon signal periodically broadcasting packets to all the fixed references [8][11][12]. This beacon signal may come from a coordinator or a dedicated terminal. Note that “synchronization” means “absolute synchronization” here, and implies that anchors know their relative distance to the beacon provider. Reference Time Mobile Terminal A TOF(A-B) B TOAB Isochronous Terminals Transmitted packets TOF(A-C) Received packets C Elapsed times measured by the system TOAC Figure 2: One Way Ranging (OWR) Protocol allowing to estimate differential Time of Arrival at a couple of two isochronous terminals (feeding TDOA-based positioning algorithms) For all the considered scenarios (TOA/TWR, TOA/OWR and TDOA/OWR), slot lengths and procedures fixed by a pre-existing communication standard represent drastic constraints for the maximum and minimum (blind distances) relative measurable distances, and the ranging accuracy. Finally, the approach taken to calculate the position of a mobile terminal depends on whether TOA or TDOA location metrics are used. A straightforward approach uses a geometric interpretation to calculate the intersection of circles for TOA-based algorithms and hyperbolas for TDOA-based algorithms. Indeed, if three TOA are measured between a mobile terminal and three (or more) distinct anchors (note that anchors should be considered as nodes doted with a prior knowledge of their relative positions) on the one hand, or if two TDOA (or more) can be formed at a set of three distinct anchors (or more), the mobile position can be easily computed in the 2-D plane. These solutions (geometrical solutions or solutions based on optimization Submission Page 4 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 procedures) correspond to popular radiolocation methods, but it is not the purpose of the very document to focus on these positioning algorithms. Possible Embodiments for UWB Location Systems The principles described in the previous section have already adopted specific embodiments for UWB location assets. The solutions listed hereafter do not pretend to be regarded as an exhaustive overview. Time Domain [8] demonstrated that both TOA/TWR transactions (Half-duplex ranging and TCP/IP protocol) for ranging, and TDOA/OWR transactions for positioning, can be viable when fusing location and communications abilities. In a more general framework, methods had been described for UWB location systems [3]. In a first one, two asynchronous transceivers use a TWR duplex protocol to achieve synchronization and estimate the range. This configuration provides TOA through TWR transactions, that is to say only the relative distance information (although additional AOA measurement could enable to find the position) (C.f. 1-Figure 3). In a second solution, a transmitter and a receiver are synchronized with a universal external clock and the range is determined through a OWR transaction. This configuration provides TOA through a OWR transaction, that is to say only the relative distance information (although additional AOA measurement could enable to find the position) (C.f. 2-Figure 3). In another solution, three relative distance measurements from a mobile to three references are performed through three distinct full duplex TWR links. This configuration leads to the estimation of three TOAs through three distinct TWR transactions. The position is then calculated with classical triangulation methods (C.f. 3-Figure 3). A variant relies on the pre-synchronization (achieved with a universal external clock) of a mobile transmitter with anchors acting as receivers. This configuration leads to the estimation of three TOAs through three distinct OWR transactions. According to another solution, three pre-synchronized anchors (with a universal external beacon signal) act as receivers (C.f. 4), Figure 3). This configuration leads to the estimation of two TDOAs through three distinct OWR transactions. Submission Page 5 Benoit Denis, CEA/LETI August, 2004 1) IEEE P802.15-04/427r0 TX/RX RX/TX A B RX TX 2) TX/RX TX 4) 3) B A A A RX/TX RX/TX B D(B-D) D RX RX B D(B-C) RX/TX D(B-C) C D(B-D) D(C-D) D D(C-D) RX C OWR Ranging Protocol Mobile Terminals TWR Ranging Protocol Anchors / Fixed terminals A priori known distances Pre-synchronized Terminals Figure 3: Possible generic configurations for UWB location Assets [3]: 1) & 2) provide ranging information between distinct mobile terminals (relative distance) and 3) & 4) provide position of a particular mobile terminals relatively to anchors or fixed terminals According to AEther Wire & Location [6][9], range information is obtained from TWR halfduplex protocols between distributed UWB transceivers. This solution is equivalent to the first solution previously described in [3] (C.f. Figure 3). Each localizer acquires as many contacts as possible and the range information is shared within the whole network. As local groups of nodes form into clusters, nodes in one cluster link with nodes from another cluster, forming bridges. Beyond this, a suggested positioning approach would be distributed and the architectural network model would be ad hoc. In the PAL (Precision Asset Location) system proposed by MSSI [12], active tags (to be located), periodically broadcast short packet bursts (including synchronization preamble and tag ID) to a Submission Page 6 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 set of wired passive synchronized receivers which form TDOAs from TOA measurements. Then, a centralized calculation of tag positions is lead with a non-linear optimization algorithm. This solution is equivalent to the fourth solution proposed in [3] (C.f. 4- Figure 3). According to another proposal by MMSI [11], a UWB mobile rover initiates a sequence of packet bursts including synchronization preamble and rover’s ID toward fixed UWB beacons. Then the latter transpond after a fixed time offset to the rover (avoiding collisions) which determines the corresponding round trip delays and finally calculates its position by minimizing an error functional via Newton-Raphson algorithm. This solution is equivalent to the third solution proposed in [3] (C.f. 3-Figure 3). In a third MSSI’s embodiment [4] (C.f. Figure 4), UWB transceivers are set at known fixed locations and a mobile terminal determines its own location by solving a set of equations according to measured TOFs. At local level, the mobile terminal forms TDOA from TOA measurements. In order to eliminate a clock distribution system, self-synchronization of pulse timing is achieved by generating a start pulse at one of the transceivers. One of the transceivers (namely A) broadcasts a specific signal towards the others (including fixed and unknown positions), so that the fixed anchors (namely B, C, D) can determine the transmission time from A (with a priori known relative distances and TOA information). Then B transmits its own signal after a pre-arranged delay to avoid pulse collision at the mobile terminal E, received by both fixed and unknown positions. In order to avoid that B is considered as A’s signal, additional data (like source ID) are used among communicated packets. The position calculation, which is easily obtained with classical LMS optimization from the set of TDOA measurements formed at the mobile, can be lead at any location (performed by the mobile terminal or by the anchors after propagating the set of equations). One of the main advantages of the proposed system is that absolute self re-synchronization is achieved at each new transmitted burst. Submission Page 7 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 TX D(A-B) Calculated from D(A-B) and TrecB to avoid collisions at the mobile Time Slot A Step 1 A RX/TX TOF(A-B) B B RX E TrecB TOF(B-C) C Step 2 TOF(A-E) D(B-C) RX/TX RX/TX C TOF(B-E) E D Step 3 Estimated TDOA at the mobile terminal D(C-D) Transmitted packets Received packets Figure 4 : Self-synchronized UWB Assets location [4] Ranging Transactions and Communication Standards: the IEEE 802.15.3 example PNC to DEV Ranging General Transactions In order to estimate the relative distance between the PNC and the DEV, a classical Two-Way Ranging (TWR) would obviously be required since the entities are a priori asynchronous, for instance if the DEV intended to join the PicoNet for the first time, or if the propagation environment had changed within the superframe duration. The beacon synchronization would obviously provide relative synchronization reference time for the DEV. However, ranging transactions between the PNC and the DEV could benefit from the MAC resources which are naturally available at the beginning of each superframe. Submission Page 8 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 A possible solution relies on the half-duplex link that is available when the DEV intends to join the PicoNet. This approach consists in using the expected association MCTA’s frame structure for channel time request with Imm-ACKs (or extended to Dly-ACK cases if possible). The main idea is that Association MCTA provides Two Way Ranging on its own, when considering the Association Request (DEV to PNC Link) and the ACK (PNC to DEV Link). More precisely, MCTA is composed of well defined slots. Inside each slot, it is assumed that there is enough time to perform a complete TWR scheme, send a request and get the response (an ACK). Typically, a DEV that wants to send a ranging request to the PNC will access a MCTA slot if slotted Aloha is used. Upon reception of the request, the PNC will respond to the DEV with an ACK frame after SIFS, i.e. still in the same MCTA slot (See Figure 5). F1 DEV to PNC SIFS ACK SIFS F2 SIFS ACK SIFS PNC to DEV Figure 5 : MCTA’s frame structure in the 802.15.3 MAC An additional enhancement to this basic scheme consists in combining MCTA resources and Beacon synchronization, which obviously provides another natural Two Way link (See Figure 6). This additional Two Way Link leads to a much more accurate range estimation, and provides drift estimation. In this new scheme, the PNC initiates the first Two Way Ranging transaction and performs a preliminary distance estimation by measuring the elapsed time between the emission of the Beacon signal and the reception of a request (medium access) formulated by the DEV at the beginning of a MCTA slot. In the second TWR transaction, the DEV performs its own estimation by measuring the elapsed time between the emission of its request and the reception of the ACK from the PNC during the Association MCTA. Note that the PNC can transmit its estimate within the communication payload of the ACK, so that the DEV will have two estimates of its relative distance to the PNC. This approach is inspired by the UWB ranging application described in [6]. Submission Page 9 Benoit Denis, CEA/LETI August, 2004 RefPNC RefDEV IEEE P802.15-04/427r0 Transmitting to DEV PNC’s TOF Estimate PNC’s TOF Estimate Available T1 T2 PNC PNC TOF TOF TOF DEV PNC T1 PicoNet Synchronization Beacon T2 Request for a Medium Access Acknowledgement DEV’s TOF Estimate Available Receiving PNC’s TOF Estimate MCTA Figure 6 : PNC to DEV double TWR scheme at the beginning of the superframe On Figure 6, for the purpose of simplification, synchronization events have been represented as detection events associated with the first pulse arrival (in the training sequence). A more realistic representation would consider frame delineation events (detection of the first arriving pulse in the last training sequence, at the end of the channel estimation header). Moreover, note that the proposed representation corresponds to the simplified case when retransmission times are conditioned by previous estimated TOAs. But, in a more general framework, time stamp must be taken into account. Ranging Errors from Relative Clock Drifts and Response Delays When referring to Figure 6, one could easily obtain the following expressions: ~ 2TOF PNC T1 T1 2TOF 1 PNC 1 PNC 1 PNC and ~ 2TOF DEV T2 T2 2TOF 1 PNC 1 PNC 1 PNC Submission Page 10 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 ~ Where T1 , T2 represent response delays, TOF and TOF respectively the real and estimated TOFs, PNC f 0 and PNC f 0 the frequency offsets of DEV’s and PNC’s clocks relative to an ideal frequency f 0 . In the proposed ranging procedure (under the assumption of a correct detection), it can be shown that: T1 ~ TOF PNC 1 PNC TOF 21 PNC and that T2 ~ TOF DEV 1 PNC TOF 21 PNC Single TOF Estimation ~ ~ If ranging is based on a single estimation TOF DEV or TOF PNC (available with single TWR transactions), the error on the range estimate due to clock drifts and protocol response delays is on the order of: ~ E DEV TOF DEV TOF PNC TOF and ~ E PNC TOF PNC TOF PNC TOF T2 21 PNC T1 21 PNC Depending on PNC , T1 , T2 and , these errors can be significant. Now, considering a usual range lower than 15m, or equivalently that the maximum time of flight TOF is lower than 50ns, and that the absolute drift is on the order of 10-5, it is clear that the first terms involved in the previous expressions are much lower than 50ps, and hence, can be neglected. So, generally speaking and in first approximation, we can say that the error committed on the range estimate is: E DEV T2 21 PNC and E PNC T1 21 PNC Submission Page 11 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 At this point, several parameters should be discussed: - The value of the pre-convinced reply delay T2, depending on the PNC’s ACK - The value of , depending on a preliminary drift compensation, or initial drift conditions at the initiation of the PicoNet; in other words. A preliminary drift correction obviously implies a preliminary drift estimation between the PNC and the DEV. In other words, before performing the whole ranging procedure, the DEV could wait for beacon synchronization over a sufficient number of Superframes. This will impact the initial value of the term . Ranging Error EDEV(s) / Single DEV's T OF -7 Estimate / =10-5 PNC 10 -8 10 -9 10 -10 10 -11 10 T = 1.00e+001 s 2 T = 1.00e+002 s -12 10 2 T = 1.00e+003 s 2 T = 1.00e+004 s 2 -13 10 -7 10 -6 10 = - A -5 10 PNC Figure 7 : Ranging Error with a Single DEV’s T OF Estimation (single TWR between the DEV and the PNC) Actually, frequency offsets are random values. However, for the purpose of providing coarse but realistic specifications concerning and T2, we can arbitrary set PNC to a pessimistic value of 10-5. As shown on Figure 7, the ranging error for the single DEV’s TOF estimation is maintained below 50ps for up to 10-5 if the ACK occurs within a duration less than 10μs. This corresponds to uncompensated drift situations when the value of is very large. Otherwise, when considering traditional values of = 10-6 (resp. 10-7), the constraints on the ACK collapses down to 100μs (resp. 1000μs). Submission Page 12 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 Joint DEV’s and PNC’s TOF Estimations ~ So, a possible enhancement for the ranging procedure consists in using both TOF DEV and ~ TOF PNC estimates, so that: - The DEV computes the clock rate (See [6]) relative to the PNC: ~ T1 T2 2TOF PNC 1 R ~ 1 T1 T2 2TOF DEV - The DEV corrects the estimated TOF with clock rate information: T 1 ~ TOF TOF 1 TOF DEV 2 1 . Note that the available estimate actually 2 R corresponds to the actual radio distance, and that is removed out of the expression, so that the expected error on range estimate could substantially decrease - the DEV can additionally make an approximation of its own remaining drift relatively to the PNC and update its digital drift correction within the current superframe: ~ 1 R 1 R 1 R R As a conclusion, if a perfect detection is assumed and if the observation window is correctly positioned (in other words, if the path corresponding to the geometrical distance is available and detected), the ranging precision could be high since a joint estimation algorithm allows one to take into account the relative drift between the DEV and the PNC. Time stamp In this section, we will to consider the use of time stamp in classical TWR transactions and the general impact on the analytical expressions for the estimated round trip time of flight. TReply B B TOF A A Transmitting to A estimated TOF + TS TOF TS Demodulating TOF + TS estimated by B Figure 8: General use of time stamp in a TWR transaction between two terminals Submission Page 13 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 So, in a typical Two Way Ranging scheme involving two distinct entities (namely DEV-A and DEV-B), retransmission times, i.e. the response from DEV-B to DEV-A's request, should be conditioned by the beginning of DEV-B's observation window, and not by the estimated time of arrival of the request from DEV-A determined by DEV-B. Traditionally, in radiolocation systems based on TWR transactions, time stamp is used to reduce the global measured elapsed time (relative to the time of flight), and hence, to reduce the uncertainty on the estimated range. In particular, specific processing dedicated to ranging (complex path detection algorithm) is postponed after the retransmission of the answer. Then, further communications from DEV-B to DEV-A should contain the estimated delay between the beginning of the observation window and the estimated time of arrival, so that DEV-A could compensate the actual response delay out of its own measurement (measured delay between the emission of the request and the reception of the answer). But in the very context, time stamp could not specifically be imposed by the necessity to avoid large processing times, since the DEVs have to wait for the end of a transmitted frame (a fortiori the channel estimation preamble) before transmitting the answer. Moreover, the range estimation usually relies on channel estimation, which is a task imposed by the communication. In other words, taking into account the necessity to achieve synchronization and to demodulate data, a terminal must wait for the end of a complete frame before retransmitting its response. So, this duration is absolutely incompressible for the reply delay. On the one hand, the main motivation for time stamp corresponds to the necessity of transmitting signals at prescribed instants linked to the available system temporal granularity. In other words, it is obviously not possible to emit pulses on a “continuous” temporal scale, but at discrete times. On the other hand, retransmission times are conditioned by the availability of DEV’s resources. One terminal would have to wait for a minimum time before its internal resources (baseband and/or MAC HW, etc…) get free. In the following, for the purpose of generality, we are to take into account a potential offset Ts between the actual instant for the emission of the request and the beginning of the integration process (or equivalently, the beginning of the observation window). It is assumed on Figure 8 that the DEV-A opens an observation window that allows to observe the arrival of the answer in spite of the uncertainty on TS. So, from the observation of Figure 8, it comes that: 1 1 ~ TOF 1 A 2TOF 2 1 B Submission TReply TS TOF TReply 1 B TS TOF Page 14 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 This expression can simplified into: 2 A B TReply A B ~ TOF TOF TS B A 2 2 1 B Since TS in the worst case corresponds to the integrality of the observation window, and since the relative clock drift between terminals is usually lower than 10ppm (10-5), this term can be neglected. 2 A B can be neglected as well, taking into account usual Moreover, the first term TOF 2 ranges and classical values for the absolute clock drifts. Finally, this leads to the expression: TReply A B ~ TOF 2 1 B So, when comparing the last expression to the expressions obtained for general TWR transactions (i.e. without time stamp), it is evident that in first approximation, the use of time stamp will not have any additional influence on performances. DEV to DEV Ranging General Transactions In this section, we assume that all the DEV have preliminarily compensated their propagation delays relative to the PNC out of their own clock before the beginning of the peer-to-peer communications in the CTA (for instance, thanks to preliminary double TWR transactions with the PNC), so that all the terminals in the PicoNet can be considered as synchronous in the CTA. This represents a particularly strong hypothesis, and it is evident that in realistic cases, the DEV can not be strictly synchronized to the PNC’s clock. If terminals are synchronized to a common clock (PNC’s one in our case), it is well known that direct OWR can be used for ranging. The main idea behind this is that the OWR ranging scheme is simple and less restricting when compared to TWR schemes. Submission Page 15 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 RefA RefPNC RefB RefPNC DEV-A PNC A TOF DEV-B PNC B TSyncA TSyncB CTA Slot Figure 9: DEV to DEV OWR scheme within the CTA Ranging Errors from Clock Drifts and Synchronization Offsets When considering the Figure 9, it comes that: ~ TOF B 1 PNC B TOF TSyncA TSyncB and the corresponding ranging error can be approximated by ~ E DEVB TOF B TOF 1 PNC B TSyncA TSyncB TSyncA TSyncB So, it is clear that the ranging error in the OWR scheme is principally due to synchronization offsets at the DEV and one could easily tie the OWR ranging accuracy to network synchronization performances. Submission Page 16 Benoit Denis, CEA/LETI August, 2004 IEEE P802.15-04/427r0 References [1]Ultra-Wideband Ranging in Dense Multipath environments, J-Y. Lee, Ultra-Wideband Radio Laboratory, University of Southern California, Master Thesis, 2002 [2]Ranging in a Dense Multipath Environment Using an UWB Radio Link, J-Y. Lee, R.A. Scholtz, Ultra-Wideband Radio Laboratory, University of Southern California, IEEE Journal on Selected Areas in Communications, Vol. 20, N°9, Dec. 2002 [3]System and Method for Position Determination by impulse radio, L.W. Fullerton Time Domain Corporation, US Patent 6133876, Oct. 2000 [4]Ultra Wideband Precision Geolocation System, R.J. Fontana Multispectral Solutions, Inc., US Patent 6054950, Apr. 2000 [5]Short Range Radio locator System, T.E. McEwan, The Regents of the university of California, US Patent 5589838, Dec. 1996 [6]Spread Spectrum Localizers, R. Fleming, Aether Wire & Location, Inc., US Patent 6002708, Dec. 1999 [7]Ultra Wideband (UWB) Radios for Precision Location, Time Domain Corporation [8]Fusing Communications and Positioning – UWB offers Exciting Possibilities D. Kelly, G. Shreve, D. Langford, Time Domain Corporation [9]Rapid acquisition for Ultra-Wideband Localizers, R. Fleming, C. Kushner, G. Roberts, U. Nandiwada, AEther Wire & Location, Inc. 2002 IEEE Conference on Ultra Wideband Systems and Technologies, Baltimore [10]Ultra-Wideband for Navigation and Communications, J.C. Adams, W. Gregorwich, L. Capots, D. Liccardo, Lockheed Martin Advanced Technology Center Aerospace Conference, 2001, IEEE Proceedings. , Volume: 2 , 2001 Page(s): 2/785 -2/792 vol.2 [11]Experimental Results from an Ultra Wideband Precision Geolocation System, R.J. Fontana, Multispectral Solutions, Inc. EuroEM Geolocation, Edinburgh, 30 May 2000 [12]Ultra-Wideband Precision Asset Location System R.J. Fontana Multispectral Solutions, Inc., 2002 IEEE Conference on Ultra Wideband Systems and Technologies, Baltimore Submission Page 17 Benoit Denis, CEA/LETI