Paper
advertisement

ROBUST ABF FOR LARGE PASSIVE SENSOR ARRAYS
N. L. Owsley and J. A. Tague
Office of Naval Research Code 321US
C/o Mandex Corp
4001 N. 9th Str. Suite 106
Arlington, VA 22203
703 234 1160
owsleyn@onr.navy.mil
taguej@onr.navy.mil
N, and sacrifice little if any performance. The
computational operation with the greatest burden
in ABF is the inversion of the estimated sensor
cross-spectral density matrix (CSDM) in the Mdimensional sample vector “snapshot” space.
This potential savings in computation may not be
realized if a separate matrix inversion is required
for each beam steering direction as is the case for
a reduced dimension beam space approach. This
paper discusses a GSC method wherein only a
single matrix inversion of the estimated auxiliary
snapshot vector CSDM is required for all
steering directions. A GSC algorithm for which
the major computational operation, matrix
inversion, is independent of steering direction is
termed Steering Invariant Sidelobe Cancellation
(SISC).
ABSTRACT
Broadband adaptive beamforming for arrays
having a large number of sensors in the
presence of sensor phase uncertainty requires
both computational efficiency and signal
model error robustness. A Generalized
Sidelobe Cancellation (GSC) method with a
Dominant
Mode
Rejection
(DMR)
implementation that is steering direction
invariant in the major computational
operation, matrix inversion, and robust to
model error is presented. Steering (direction)
Invariant Sidelobe Cancellation (SISC) is in
contrast to the use of either GSC with a signal
nulling, blocking matrix or beam-space
approach that require the inversion of a
different, albeit reduced-dimension auxiliary
array data estimated covariance matrix for
every beam steering direction. SISC
robustness is achieved through a linear
combination (blending) of the SISC filter
weight vector and the inherently robust, nonadaptive conventional beamformer steering
vector. Examples that illustrate and compare
the SISC with alternative element space
robust adaptation methods are presented.
In the next section, the background of a
traditional GSC ABF approach using presteering
and a signal blocking matrix is presented and the
important notation is introduced. Section 3.0
develops the steering (direction) invariant
(generalized) sidelobe cancellation (SISC)
algorithm and compares it to the traditional GSC
approach. The SISC algorithm is discussed in a
form that is robust to beamformer signal model
error. Next, snapshot simulation results are given
that compare the SISC performance to that of
element space ABF with and without robustness
features. Finally, a summary and direction of
the current SISC research is included.
1.0 INTRODUCTION
Implementation
of
broadband
adaptive
beamforming (ABF) algorithms in element space
for arrays with hundreds to thousands of sensor
elements is fraught with the curse of
dimensionality including high computational
burden, slow mean convergence and excessive
steady state misadjustment noise [WMGG67].
Instead, ABF practitioners have sought reduced
dimension adaptation space solutions that adapt
on either beam output (space) data, linearly
combined sensor or signal-free auxiliary sensor
(space) data using generalized sidelobe
cancellation (GSC) [VT02]. Such methods
employ far fewer adaptively filtered channels,
M, than the number of primary sensor elements,
2.0 GSC BACKGROUND
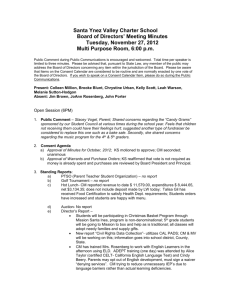
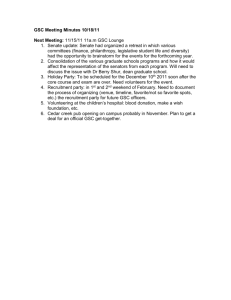
The traditional form of the GSC is given in
Figure 1. First, the N-dimensional element space
sample vector snapshot, x(), is pre-steered to
the b-th beam direction by the steering matrix
S(,b) = diag( exp(-j(1, b)), exp(-j(2, b)),
… , exp(-j(N, b))), where (n, b) is the time
delay applied to the n-th sensor output to steer a
beam at the b-th location. In the upper path, the
pre-steered snapshot vector is accumulated to
1
form the Conventional Beamformer (CBF)
output
yc(, b) = (S(, b)1 N)Hx()
= v(, b)Hx() .
apertures and many beams even when subspace
matrix inversion methods are employed
[Ows85].
(1.1)
(1.2)
1N = [ 1 1 … 1]T (N-by-1)
x()
The superscript “H” indicates the matrix complex
conjugate transpose operation and 1N is an Ndimension column vector of ones. In the lower
path, the N-by-M signal blocking matrix, B(),
and M-dimensional unconstrained Weiner
adaptive filter vector are applied to the snapshot
to yield the CBF output coherent noise estimator
H
H
ya(, b) = wa(, b) B() x().
B
x
Hx()
y()
+
-
ya(,b) = waHBHSHx()
v(, b) = S (,b)1N
Unconstrained
Weiner Filter
Figure 1. Generalized Sidelobe Cancellation
(GSC) ABF with conventional beamformer
(CBF) pre-steering matrix, S(,b), and an N-byMa signal blocking matrix B().
(1.3)
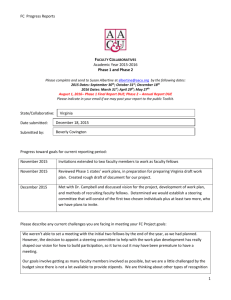
v (b)
x()
x
yc(,b) = v(, b)Hx() +
y()
+
-
wa(b, )
(1.4)
A()
a()
x
ya(,b) = waHAHx()
va( b) = A()v(, b)
The value of wa(,b) that minimizes the CBF
noise cancelled residual variance
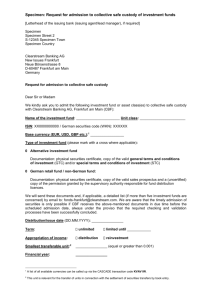
Figure 2. Steering (direction) Invariant Sidelobe
Cancellation (SISC) ABF with parallel CBF
steering vector, v(, b), and an N-by-Ma
auxiliary array selection matrix A
E{ y(ω, b) } E{ y c (ω, b) y a (ω , b) }
2
+
x
yc(,b) = v(, b)
wa(b, )
The signal blocking matrix must satisfy the
constraint that a signal perfectly matched to the
maximum response axis of the CBF be nulled by
B() to prevent signal suppression. This is
realized by making 1N, orthogonal to the
columns of B() according to
B()H1 N = 0.
S (b)
2
(1.5)
2
E{ ( v(ω, b) B(ω) w a (ω, b)) S(ω, b) H x(ω ) }
H
2.0 STEERING INVARIANT SIDELOBE
CANCELLATION (SISC)
(1.6)
is
Consider the modified sidelobe cancellation
scheme given in Figure 2 wherein there is no
presteering and the CBF beam output is formed
entirely in the upper path. The auxiliary data
vector is formed at the output of the matrix filter
A() and there has been no previous steering
operation. Robust SISC first requires a solution
to the minimum noise residual variance problem
as in the traditional GSC above. However, the
problem is stated as a distortionless response
(DR) linearly constrained quadratic minimum
variance objective w.r.t. the constrained Weiner
filter vector wa(, b) as follows:
wa(,b) =
[B()HS(,b)HRS(,b)B()]-1B()HS(,b) HRv(,b).
(1.7)
The N-by-N matrix, R = E{x()x()H}, is the
element space snapshot vector CSDM. A crucial
point is that Eq. (1.7) requires the inversion of
only an M-by-M matrix as compared to an N-byN matrix in an element space implementation.
However, even though M < N and the matrix
inversion computational burden is reduced
accordingly, the matrix to be inverted is a
function of the beam steering index b. This
requires a matrix inversion for every beam
direction rather than a single direction invariant,
albeit larger matrix inversion for an element
space realization. This requirement becomes the
dominant factor in the computational load for a
high resolution ABF system for large array
H
minimize (v - Aw a ) R (v - Aw a )
w.r.t.
(2.1)
H
subject to (v - Aw a ) v = 1,
2
(2.2)
wa
Note that explicit dependence of notation on
frequency, , and steering direction index, b, has
been suppressed. The vector v = S1N is the full N
sensor array conventional beamformer (CBF)
steering vector. The matrix A is and N(row)-byMa (column) auxiliary (sub-)array selection
matrix and wa is the Ma (< N) dimensional
auxiliary array adaptive filter vector. This
solution is
the reduced dimensionality Ma vector space. The
DR constraint, w a v a 0 , is ensured for Eq.
H
(2.5) and the matrix Raa designated for inversion
is the same for all steering directions.
As a final reduced dimensional ABF option, the
Sub-Array Pre-Processor (SAPP) ABF structure
that implements the objective
minimize: wpHPHRPwp = wpHRppwp (2.6a)
subject to: wpH vp = wpH PHv = 1 (2.6b)
-1
v H A A H RA A H Rv
H
w a = A'RA A R - H
IN v
-1
v A A'RA A H v
(2.3)
Robustness to signal model error is achieved
with a blended CBF and SISC beamforming
filter, w, formed according to
-1
is also of interest for comparison. The solution
wp = (vpH Rpp-1 vp) -1 Rpp-1 vp where P is a fixed
N-by-Mp matrix that requires only a single Mp
dimension matrix inversion for all beams and is
algorithmically somewhat more simple than Eq.
(2.7). The dimension reducing matrices A and P
may or may not be equal in that for some
aperture topologies A may not need to
incorporate all sensors in linear combination to
adequately estimate the yc coherent noise
component. Whereas P must incorporate all
sensors in linear combination to achieve the
same potential for SAPP array gain as for the
SISC.
wSISC = (v –Awa) , when Aw a g
2
(2.4a)
and
wSISC = (1-)v + (v –Awa)
(2.4b)
2
= v - Awa, when Aw a > g . (2.4c)
3. STATIC SOURCES EXAMPLE
The parameter = g1/2/abs(v –Awa) and g is
defined by the maximum allowable signal
suppression due to signal model error [Ows02].
This method of achieving robustness places a
maximum value on the magnitude squared value
of wSISC that is referred to as the White Noise
Gain Constraint (WNGC). The WNGC limit is
achieved simply by selecting g in Eq. 2.4 in
conjunction with the identity abs(v) = 1.
Consider a passive linear array with forty-eight
(N = 48) sensors uniformly spaced at one-half
wave length at normalized frequency fo = 1.0.
Conventional time-delay-and-sum beamforming
(CBF) and candidate Adaptive Beamforming
(ABF) techniques are performed at a single
frequency of 0.2. A 201 beam set is formed with
steering angles spaced uniformly in direction
cosine from 0 to 180 degrees. The beam output
power response as a function of direction cosine
is calculated. There are six far field stationary
sources present at angle cosines 0.5, 0.32, -0.1, 0.3, -0.5 and -0.9 and SNR levels referenced to
the spatially uncorrelated noise at a perfectly
matched CBF beamformer output of 40, 10, 15,
13, 17 and 11 dB respectively. This example is
intended to compare various element space
MVDR-based methods, SISC and SAPP
methods using ABF algorithms that are rendered
either robust and or non-robust to an
independent, zero mean random phase
fluctuation across the array sensors. The
beamforming algorithms compared are: (1) CBF:
conventional beamforming with -25 dB sidelobe
Taylor sensor amplitude shading; (2) element
space Minimum Variance Distortionless
It is observed that the matrix inverse operation in
Equ. (2.3) is independent of steering and that the
form of Eq. (2.3) that would be appropriate for
implementation is
1
v a v a R aa
H
w a R aa1 (I M
1
v a R aa
va
H
(2.5)
)rac
where va = AHv and rac E A xy c . Eq.
H
H
(2.5) ensures that the projection of rac onto the
vector va is in the null space of wa. It is seen
from Equ. (2.5) that the CSDM, Raa, for the
auxiliary data vector a = AHx is estimated and
inverted and the cross-correlation vector, rac, is
estimated with both operations implemented in
3
Response (MVDR) [Ows85]: non-robust MVDR
using full element space CSDM matrix
inversion; (3) (Diagonal) Loaded DMR: element
space
Dominant Mode Rejection (DMR)
[Ows88] with iteratively determined diagonal
loading of the element space CSDM to achieve a
specified WNGC [CZO87, CP97]; (4) Excision
DMR: the eigenvector from the CSDM estimate
that has the largest projection onto the steering
vector for the beam [Kog02] is removed; (5)
CBF-EDMR: element space blended CBF and
DMR with infinite enhancement of the dominant
signal eigenvalues [Ows02]; (6) SISC: nonrobust SISC with DMR processing of the
auxiliary data CSDM; (7) CBF–SISC blend:
robust SISC and (8) SAPP: subarray [Ows72]
preprocessing DMR and (9) CBF-SAPP blend:
robust SAPP . All blended robust processors
have a WNGC = 12 db limit.
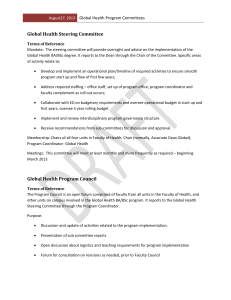
independent and zero mean random phase
fluctuation of 0.07 wavelengths standard
deviation is imposed on the sensor outputs.
Relative to Figure 3, the poor resolution CBF
performance is unchanged, the MVDR response
to the high SNR = 40 db source is suppressed by
almost 20 db compared to the non-robust SISC
by 10 db and the CBF-EDMR blend with
suppression of less than 4 db. Note that there is
minimal suppression of the response for any
beamforming method due to a source with an
SNR < 17 db. The nonrobust SISC is more
robust than the nonrobust element space MVDR
to signal suppression because the summation of
four adjacent sensors in each subarray group to
form one auxiliary channel. This averages the
zero mean phase errors within the group and
statistically reduces the signal model error.
phase interval = 0.07; Sources at: 0.5 0.31 -0.1 -0.3 -0.5 -0.9
50
phase interval = 0; Sources at: 0.5 0.31 -0.1 -0.3 -0.5 -0.9
50
30
40
40
SISC (-)
Power (dB)
Power (dB)
40
CBF w/25 dB SLL (...)
MVDR (---)
CBF-EDMR Blend (-)
DMR GSC (-)
GSCmlm = 0 dB
Hyd. Group Size = 4
WNGC = 12 dB
17
13 15
20
11
10
30
CBF w/25 dB SLL (...)
MVDR (---)
CBF-EDMR Blend (-)
DMR GSC (-)
SISC (-)
40
GSCmlm = 0 dB
Hyd. Group Size = 4
WNGC = 12 dB
10
17 13 15
20
11
10
10
0
-1
0
-1
-0.5
0
0.5
-0.5
0
0.5
1
Cosine
Cosine
1
Cosine
Cosine
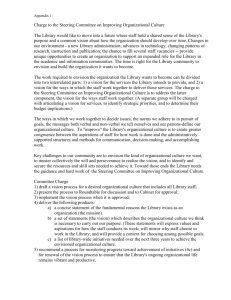
Figure 4. Beamformer response comparison with
sensor 0.07 wavelength rms random phase error.
Figure 3. Beamformer response comparison
without sensor random phase error.
phase interval = 0.07; Sources at: 0.5 0.31 -0.1 -0.3 -0.5 -0.9
50
Figure 3 compares the response of a CBF,
element space MVDR ABF, element space
EDMR-CBF blend and a SISC with Ma = 12. In
Figure 3, the source propagation is known
exactly and neither the MVDR nor the SISC
include robustness. The reduction in the number
of adaptively filtered channels from 48 in the
element space MVDR to 12 in the SISC is
accomplished by summing the outputs of all
nonoverlapping (subarray) groups of four
adjacent sensors. The element space MVDR and
the non-robust SISC responses are essentially
indistinguishable. The robust CBF-EDMR gives
an increased deflection for the lower SNR
sources with no significant loss of angular
resolution to include robustness.
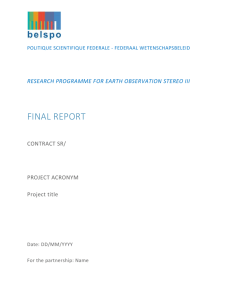
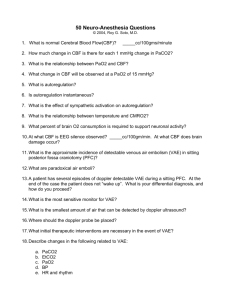
Figure 5. Beamformer response comparison with
sensor 0.07 wavelength rms random phase error
and robustness.
In Figure 4, the same algorithms as in Figure 3
are compared, however, a statistically
In Figure 5, the phase randomness in Figure 4 is
retained but robustness is provided to the SISC
45
Power (db)
40
35
CBF w/25 dB SLL (...)
CBF-EDMR Blend (-)
CBF-GSC Blend (-)
Excision DMR blend (ooo)
Subarray
blend
CBFSISCABF
Blend
(-) (-)
CBF – SAPP Blend (-)
40
30
25
15
10
17 13 15
20
11
10
5
0
-1
-0.5
0
0.5
1
Cosine
4
filter vector with a WNGC = 12 db by the use of
the CBF blend process defined by Eq. 2.4. Also
shown Figure 5 are the responses for Excision
DMR and SAPP DMR (Mp = 12) wherein both
algorithms have been blended with CBF to limit
the WNGC to 12 db. All algorithms use a DMR
with seven degrees of freedom, that is, seven
eigenvectors are estimated in approximating the
CSDMs R, Raa and Rpp respectively.
and using sparse subarrays fits naturally into the
broadband SISC approach. Accordingly, both
computational and adaptation performance
improvements result from the SISC method
presented. The applicability of methods for
ensuring robustness to signal model error to
reduce strong source suppression in the presence
of random and beam steering phase errors has
been emphasized. Nine beamforming algorithms
have been compared and the SISC method,
which has at least a factor of four reduction in
adaptive channel count, has been shown to
exhibit beam response equivalent to a full
element space ABF beamforming procedure.
Figure 6 presents beam power response patterns
for the random phase case of Figures 4 and 5 and
includes the CBF, MVDR, diagonal Loaded
DMR and Excision DMR algorithms for
comparison. The element space Loaded DMR,
robust auxiliary space SISC and robust SAPP
DMR give equivalent responses except that the
SAPP DMR has decreased sensitivity in the
direction longitudinal to the linear array axis.
This is because of the slight directionality of the
four sensor summation group in the SAPP. Even
though the SISC uses exactly the same subarray
grouping as the SAPP, A = P, the SISC does not
have decreased longitudinal direction response
sensitivity.
REFERENCES
[CP97] Cox, H. and Pitre, R., “Robust DMR and
Multi-rate Adaptive Beamforming,” Proceedings
of the 31st Asilomar Conference on Signals,
Systems and Computers, Nov. 1997, pp. 920924.
[CZO87] Cox, H., Zeskind, R. and Owen, M.,
“Robust Adaptive Beamforming,” IEEE Trans.
on Acoust., Speech and Signal Proc., ASSP-35,
No. 10, Oct. 1987, pp. 1365-1375.
[Kog02] Kogon, S., “Robust Adaptive
Beamforming for Passive Sonar using
Eigenvector/Beam Association and Excision,”
Sensor Array and Multichannel (SAM) Signal
Processing Workshop, Washington, D.C., 5-6
August 2002.
[Ows72] Owsley, N., “A Recent Trend in
Adaptive Spatial Processing for Sensor Arrays:
Constrained Adaptation,” in Signal Processing,
edited by J. W. R. Griffiths et al, Academic
Press, 1972, pp. 591-604.
[Ows78] Owsley, N. L.,
“Adaptive Data
Orthogonalization,” Proceedings of IEEE
ICASSP, Tulsa, Okla., April 1978, pp. 109-112.
[Ows85] Owsley, N. L. “ Sonar Array
Processing,” in Adaptive Array Processing with
S. Haykin, Editor.
[Ows88] Owsley, N. L., “Enhanced (Dominant
Mode) Minimum Variance (Rejection)
Beamforming,” in Underwater Acoustic Data
Processing edited by Y. T. Chan, Kluwer
Academic Publishers, 1989, pp. 285-291.
[Ows00] Owsley, N., “Rapidly Adaptive
Dominant Mode Rejection Beamforming,”
Proceedings of the ONR-DARPA Workshop on
Rapidly Adaptive Signal Processing, Arlington,
VA, 30 November 2000.
[Ows02] Owsley, N., “Data Orthogonalization in
Sensor Array Signal Processing,” Proceedings of
the IEEE Workshop on Sensor Array and
Source Levels (db): 40 10 15 13 17 11
50
CBF w/25 dB SLL (...)
MVDR (---)
Loaded DMR (-.-.)
Excision DMR (ooo)
40
40
Power (dB)
WNGC = 12 dB
30
10
17 13 15
20
11
10
0
-1
-0.5
0
0.5
1
Cosine
Cosine
Figure 6. Beamformer response comparison
with sensor 0.07 wavelength rms random phase
error and robustness.
4. SUMMARY
This paper provides a background and rationale
for the application of reduced dimension steering
invariant sidelobe cancellation (SISC) methods
to the broadband passive sensor array problem
for arrays with high sensor count and broadband
beamforming over many octaves. The ability to
form auxiliary array sensors by summing the
outputs of adjacent sensors at lower frequencies
5
Multichannel Signal Processing, Arlington, VA,
5-6 August, 2002.
[VT02] Van Trees, H., Optimum Array
Processing: Part IV of Detection, Estimation and
Modulation Theory, Wiley, 2002, pp.860-863.
[WMGG67] Widrow, B., Mantey, P., Griffiths,
L., and Goode, B., “Adaptive Antenna Systems,”
Proc. IEEE, v. 55, December 1967, pp. 21432159
6
7
8
9