1 Lecture 4 – Exercise Solutions
advertisement

Document limitations
Author:
Page:
Mads Doré Hansen
1/8
Document number:
Document class:
Creation date:
5/0502-AUC003 UK
Lecture Notes
13-022016
REAL-TIME SYSTEMS - EXERCISE 4 SOLUTIONS
Abstract
This document contains soluations for exercises at the fourth lecture in realtime systems. The content is mostly a collection of notes from previous
courses in real-time systems held by Henrik Schiøler at Aalborg University,
Denmark. The collection is made on approval from Henrik Schiøler.
Content
1
1.1
1.2
1.3
1.4
LECTURE 4 – EXERCISE SOLUTIONS ................................................ 2
QUESTION 1.......................................................................................... 2
QUESTION 2.......................................................................................... 4
QUESTION 3.......................................................................................... 6
QUESTION 4.......................................................................................... 8
Document limitations
1
Author:
Page:
Mads Doré Hansen
2/8
Document number:
Document class:
Creation date:
5/0502-AUC003 UK
Lecture Notes
13-022016
Lecture 4 – Exercise Solutions
Answers to questions three and four are just one possible set of solutions.
As with almost all real-time systems the solution to questions depend on
who, how and when the system is designed.
1.1
Question 1
Given a periodic taskset : T1 = 4, c1 = 3, T2 = 12, C2 = 2 with relative
deadlines d1 = 4, d2 = 7
a. Examine the taskset w.r.t. scehdulability using the exact criterion for
DMA scheduling.
b. Is the taskset EDF schedulable ?
c. Create an EDF schedule for the taskset.
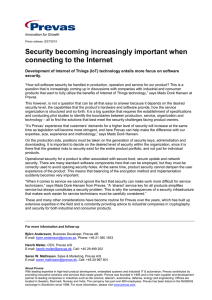
add. a.
According to DMA task1 has priority over task2 since d1< d2.
Task1:
Task2:
c1 = 3 < d1 = 4 , so task1 meets all its deadlines.
Solved graphically below.
Thus the taskset is not DMA schedulable.
add. b.
If di = Ti we need only check if U < 1 but since d2 < T2 we cannot answer the
question directly.
Document limitations
Author:
Page:
Mads Doré Hansen
3/8
Document number:
Document class:
Creation date:
5/0502-AUC003 UK
Lecture Notes
13-022016
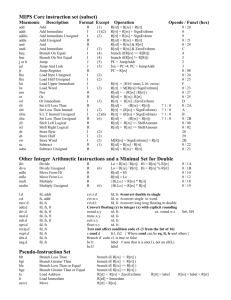
add. c.
Since lcm(T1, T2) = 12 we may lay out a cyclic schedule, where the 1. period
is scheduled according to EDF
Thus the taskset is EDF schedulable.
Document limitations
1.2
Author:
Page:
Mads Doré Hansen
4/8
Document number:
Document class:
Creation date:
5/0502-AUC003 UK
Lecture Notes
13-022016
Question 2
Given a periodic taskset T1 = 4, c1 = 1, d1 = 2, T2 = 6, c2 = 2, d2 = 3, T3 = 8,
c3 = 2, d3 = 8, where task1 and task2 share data protected by semaphore S.
Accessing the shared data lasts no more than 1 (time units)
a. Is the taskset DMA schedulable ?
b. If the data above are instead shared between task1 and task3, is the
taskset then DMA schedulable.
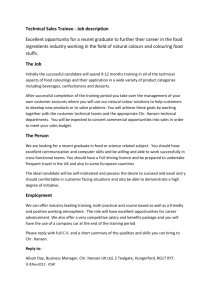
add a.
C1 = c1+1 (blocking from task2) = 2 = d1 so task1 meets all deadlines.
Task2 is analyzed graphically.
as for task3
Thus the taskset is DMA schedulable.
Document limitations
Author:
Page:
Mads Doré Hansen
5/8
Document number:
Document class:
Creation date:
5/0502-AUC003 UK
Lecture Notes
13-022016
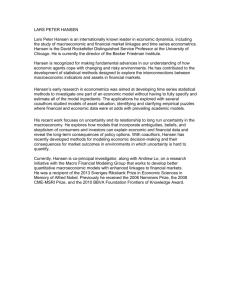
add. b.
Due to priority inversion the completion of task1 may last c1+c2+1 = 1+2+1 =
4 > d1 = 2. To prevent priority inversion we assume that we apply the priority
ceiling algorithm.
Under the priority ceiling algorithm C1 <= c1+1 = 2 = d1, hence task1 meets
its deadlines. Task2 is analyzed graphically
Thus task2 may miss its deadline and the taskset is not DMA schedulable
even with priority ceiling.
Document limitations
1.3
Author:
Page:
Mads Doré Hansen
6/8
Document number:
Document class:
Creation date:
5/0502-AUC003 UK
Lecture Notes
13-022016
Question 3
Create a SW design for a preemptive EDF scheduler, the design must
contain:
a. Data type/structures
b. Scheduler data/process flows
This design is analog to the one of round-robin.
typedef struct sTask tTask;
struct sTask {
unsigned long
unsigned long
tTaskFunction
}
RelativeDeadLine;
AbsoluteDeadLine;
*pTaskFunction;
typedef struct sTask tTask;
unsigned long CurrentTime = 0;
void TimerInterrupt(void) {
CurrentTime++;
}
void TaskReady(tTask Task) {
Task.AbsoluteDeadLine = Task.RelativeDeadLine
+ CurrentTime;
if (TaskRunningDeadLine()>Task.AbsoluteDeadLine) {
TaskRunningStore();
TaskSetCurrent(Task);
}
else {
QueueAddTask(Task);
}
}
void Scheduler(void) {
unsigned char stop = 0;
unsigned char newtick = 0;
while(!stop) {
if (QueueDeadLine()<0xFFFFFFFF) {
QueueRunNextTask();
}
}
}
As one can see from the design tasks are switched in the TaskReady
function, and not in the interrupt, this due to the fact that all dynamic
priorities are dependend on ready time and relative deadline, from which the
absolute deadline and thereby also priority can be calculated.
If a schedule user initiates a task with TaskReady this might change the
task for a while.
Document limitations
Author:
Page:
Mads Doré Hansen
7/8
Document number:
Document class:
Creation date:
5/0502-AUC003 UK
Lecture Notes
13-022016
The arbitrary undesigned functions are:
TaskRunningDeadLine
Gets the absolute dead line of the current running task. 0xFFFFFFFF
if no task is running.
TaskRunningStore
Stores the stack of the current running task as the top element of a
”preemted” stack.
TaskSetCurrent
Set the current task for specific task execution.
QueueAddTask
Adds a task to a sorted queue. The task with the lowest absolute
deadline is placed as the first element of the queue.
QueueDeadLine
Gets the deadline of the first task in the sorted queue. 0xFFFFFFFF
if no task in queue.
QueueRunNextTask
Executes the first task in the sorted queue. This by blocking a return
from the function until the started task is executed.
It is possible to enhance this design to handle periodical tasks and delayed
ready time.
struct sTask {
unsigned long
unsigned long
unsigned long
unsigned long
tTaskFunction
}
RelativeDeadLine;
AbsoluteDeadLine;
Periode;
ReadyTime;
*pTaskFunction;
unsigned long CurrentTime = 0;
void TaskInterrupt(void) {
PutPeriodicTasksOnQueue();
CurrentTime++;
}
Instead of using QueueAddTask to enable a task the user of the scheduler
should use another arbitrary function, e.g. AddPeriodicalTask, to add
periodical tasks to a simple list of tasks. The new function
PutPeriodicTasksOnQueue runs through the list to finde valid tasks and
initiates the task by calling TaskReady. A valid tasks is one complying to:
(CurrentTime-Task.ReadyTime)%Task.Periode == 0
AddPeriodicalTask also updates Task.ReadyTime to CurrentTime
when putting the task into the list of periodical tasks.
Document limitations
1.4
Author:
Page:
Mads Doré Hansen
8/8
Document number:
Document class:
Creation date:
5/0502-AUC003 UK
Lecture Notes
13-022016
Question 4
Create a SW design for a semaphore for mutual exclusion under immediate
ceiling to your preemptive fixed priority scheduler, the design must contain:
a. Data type/structures
b. Semaphore data/process flows
One of the preemptive fixed priority schedulers from the previous lectures
must be chosen. This solution uses the preemptive round-robin scheduler
from lecture 2.
The structure below could be used to store ceiling priority values for each
resource that can be locked in the system. (e.g. semaphores)
struct sSemaphorePriority {
unsigned long
SemaphoreID;
unsigned char
MaxPriority;
}
The only change needed is in TaskRunningPriority where the priority
return is not just the static priority of the current running task, but the results
of:
max(CurrentTask.Priority, MaxLockedPriority())
Where MaxLockedPriority returns the largest
sSemaphorePriority.MaxPriority value of semaphores locked by the
current running task.