18th European Symposium on Computer Aided Process Engineering – ESCAPE 18
Bertrand Braunschweig and Xavier Joulia (Editors)
© 2008 Elsevier B.V./Ltd. All rights reserved.
Supply Chain Design Considering Plants
Performance
Gabriela Corsano* and Jorge M. Montagna
INGAR- Instituto de Desarrollo y Diseño - Avellaneda 3657- (3000) Santa FeArgentina
Abstract
Most of the Supply Chain (SC) design models have focused on the integration problem,
where links among nodes have to be determined in order to allow an efficient operation
of the whole system. In this level, all the problem elements are modeled like black
boxes, and the optimal solution determines the nodes allocation and their capacity, and
the connections among nodes. In this work, a MILP model is proposed where decisions
about plant design are simultaneously taken with operational and planning variables.
The model considers unit duplication and the allocation of storage of discrete sizes. The
solved examples show the impact of plant design in the overall SC operation.
Keywords: supply chain design, multiproduct batch plant, MILP.
1. Introduction
A supply chain (SC) is a network of facilities (e.g. plants, warehouses, customers) that
perform a set of operations ranging from the acquisition of raw materials to the
distribution of finished goods to customers. The design of the SC involves making
several decisions like number, size and location of plants, products to be produced in
each plant, allocation of suppliers to plants and plants to distribution centers, etc.
Most of the design models have focused on the SC integration (Tsiakis et al., 2001, Ryu
and Pistikopoulos, 2005), where links among nodes have to be determined in order to
allow an efficient operation of the whole system. In this level, all the problem elements
are modeled like black boxes, with a maximum capacity, and the optimal solution
determines the nodes allocation and their capacity, and the connections among them.
Recently, Guillén et al. (2006) have addressed the SC design problem under demand
uncertainty through a multistage stochastic formulation, using a decomposition
technique that combines genetic algorithms and mathematical programming tools. Shah
(2005) has described the state of the art in SC modeling. remarking that there are not
published works dealing with the connection between process design and SC operation.
In this work, a mixed-integer linear programming (MILP) model is proposed for the
optimization of a SC where decisions about plant design are simultaneously taken with
operational and planning variables. The model considers unit duplication in phase and
out of phase and the allocation of intermediate storage of discrete sizes. Several
examples are solved to show the impact of plant design in the overall SC operation.
2. Problem Description
Four echelons in the SC are considered in this formulation: the raw material sites, the
manufacturing plants, the warehouses and customer zones. At each raw material site s (s
=1,…, Ns), one or more types of raw materials r (r = 1, …, Nr) are available to be
delivered to plants l (l = 1, …, Nl), that operate during the time horizon Hl. Each
2
G. Corsano and J. M. Montagna
multiproduct batch plant has stages j (j = 1, …, N jl ) for producing i products (i = 1, …,
Np). Parallel units duplication in phase and out of phase are allowed as well as the
allocation of intermediate storage between two batch stages. The warehouses m (m = 1,
…, Nm) have different stock capacity and the product demand of the customer zones k,
Dik, are known for k = 1, …, Nk. Moreover, the following data is assumed to be known:
(i)
the set of raw materials and their availability at each raw material site
(ii) the set of available discrete sizes for units in the batch plants
(iii) the cost parameters associated to: plants and warehouses installation, investment
and production, transportation, raw material and maintenance.
The problem is to determine:
(a) the allocation of each plant and each warehouse
(b) production of each product in each plant
(c) the structure of the plant considering parallel units duplications and allocation
of storage tanks, and unit sizes
(d) the SC structure: flows among SC nodes.
in order to minimize the total annual cost given by fixed cost, investment cost,
production cost, stock and maintenance cost, and transportation cost.
3. Model Formulation
The problem involves optimizing the SC performance simultaneously with the plant
design in order to minimize the total cost. Following, the basic constraints are posed.
3.1. SC Network Constraints
These constraints are mass balances between the different nodes in the SC. Q represent
total amounts, for example Qsril are the kg of r from s to l to produce i, fr the raw
material conversion factor, and zil is a binary variable equal to 1 if product i is produced
in plant l, and zero otherwise:
Ns
Q
s 1
sril
frilr Qil
r , i,l
zil QilLO Qil zil QilUP
Q
sril
i,l
Q
r , s, and
Qil
i,l
UP
rs
(1)
(2)
Qsril zil Q
UP
rs
r , s, i, l
(3)
i ,l
Nm
Q
m 1
ilm
(4)
Let ym be the binary variable equal to 1 if the warehouse m is installed, zero otherwise,
and Qmmax the capacity of warehouse m.
Q
ilm
Q
Qmmax ym and
imk
i ,l
Nl
Q
l 1
Qmmax ym
m
(5)
i,k
Nk
ilm
Qimk
Nm
i,m
(6)
k 1
Dik Qimk
i,k
(7)
m 1
3.2. Design Equations
Let SVjl={VFjl1, VFjl2, …, VFjlP} be the set of available discrete sizes for stage j of plant
l. p = 1,…, P represents the index for the different unit sizes. If the plant is not installed,
then all the unit sizes of that plant have to be zero. Let exl be the binary variable that
Supply chain design considering plants performance
3
takes value 1 if plant l is installed, and zero otherwise, and vjlp is a binary variable equal
to 1 if unit j of plant l has size p. Then, the size for unit j of plant l, Vjl, is given by:
P
V jl v jlpVFjlp
j , l
(8)
p 1
pSV jl
v jlp exl j , l
and zil exl
i, l
(9)
The sizing equations that relate the unit size with the batch size (Bijl) are:
Sijl Bijl
V jl
i, j , l
NPjl
Qil Nbil Bijl
i , j , l
(10)
(11)
NPjl represents the number of in phase units for stage j in plant l, Nbil the number of
batches of product i in plant l, and Sijl the size factor. In order to avoid no linear
constraints, the binary variable xxjld is defined and it takes value 1 if stage j of plant l has
d units in phase, and zero otherwise, so
NPjl
NPjlUP
d xx
d 1
NPjlUP
and
jld
xx
d 1
jld
exl
j, l
(12)
Then, replacing Eq. (11) in Eq. (10)
Sijl Qil
Nbijl
i, j, l
V jl NPjl
And substituting Eq.(13) for Eq. (8) and Eq. (12)
Sijl Qil
Nbijl
eijlpd
d , p VFjlp d
(13)
(14)
Q if vilp and xx jld are equal to 1
With eijlpd il
0 otherwise
UP
i, j, l, p
eijlpd Qil vilp
(15)
(16)
d
e
QilUP xx jld
ijlpd
i, j, l, d
(17)
p
P
Qil eijlp
i, l
(18)
p 1
3.3. Timing Constraints
Let tijl be the processing time for product i in stage j of plant l, TLil the cycle time of
product i in plant l, and NTjl the number of out of phase units for stage j of plant l. Then
Til ≥ Nbijl TLil, represents the total time for producing i in plant l, so that Til H l . The
i
cycle time is defined by
NT jlUP
tijl
TLil Nbijl x jln Nbijl i, j, l ,
n 1 n
NT jl
NT jlUP
nx
n 1
jln
j, l
(19)
NT jlUP
with
x
n 1
jln
exl
(20)
4
G. Corsano and J. M. Montagna
Where xjln is equal to 1 if n out of phase units are used in stage j of plant l, and zero
otherwise. In order to avoid no linear constraints, a new variable is defined as wijln =
Nbil xjln, and replaced in (20).
3.4. Intermediate Storage Constraints
According to Voudouris and Grossmann (1993) the upper bound for the storage vessels
can be defined by
VT jl 2 STijl Bijl s jl
i , j 1, 2, , N j 1, l
(21)
VT jl 2 STijl Bi , j 1,l s jl
i, j 1, 2,
, N j 1, l
(22)
STijl represents the size factor for storage tanks and sjl is a binary variable equal to 1 if a
tank is allocated after batch stage j, and zero otherwise.
Let STFjl VTFj1l ,VTFj 2l ,...,VTFjG jl l be the set of available discrete sizes for the tank
allocated after stage j. Let stjgl be the binary variable that takes value 1 if a tank of size g
is allocated. VTFj1l is equal to zero to represent the no tank allocation. Using Eq.(11) in
(21) and (22) the storage constraints are:
STijl Qil
(23)
Nbijl 2
st jgl i, j 1, 2,..., N j 1, l
g 1 VTFjgl
STijl Qil
(24)
Nbi , j 1,l 2
st jgl i, j 1, 2,..., N j 1, l
g 1 VTFjgl
(25)
st jgl exl j 1, 2, , N j 1, l
g
Using the continuous variable fijgl=Qil stjgl, constraints (23) and (24) become linear and:
(26)
fijgl QilUP st jgl
i, g, j 1, 2,..., N j 1, l
Qil fijgl
i, j 1, 2,
, N j 1, l
(27)
g
The bounds for number of batches can be stated by
1
Nbijl 1 st jgl Nbijl Nbi , j 1,l Nbijl 1 st jgl Nbijl i, j 1,2, , N j 1, l (28)
g 1
g 1
Where is a constant value corresponding to the maximum ratio allowed between
consecutive batch sizes. The nonlinearity in these equations is eliminated with the
definition of a new variable ijgl such that
ijgl NbijlUP st jgl
and Nbijl ijgl
i, j 1,..., N j -1 , l
(29)
g
3.5. Objective Function
The objective function is the minimization of the total annual cost given by fixed cost
(plant and warehouse installation), investment cost (batch units and storage vessels),
production cost (raw material consumption and operating cost), stock and maintenance
costs, and transportation cost (between the SC nodes).
4. Example
The example considers a SC that consists of 2 sites with 3 different raw materials, 3
possible plants with 3 stages for producing 3 products, 3 possible warehouses and 3
customer zones. Tables 1-3 show the most relevant model parameters. A set of 5
discrete sizes is provided for process units and 4 discrete sizes for storage tanks. Table 4
Supply chain design considering plants performance
5
shows these sizes and their costs. The problem was solved with GAMS via CPLEX
solver with a 0% optimality gap.
Table 1. Model parameters for the example
Product (for
all plants)
fril
R1
i1
i2
i3
0.8
0.7
0.6
R2
R3
0.85
0.7
0.65
0.7
0.7
0.65
tijl (h)
J1
14
12
16
Table 2. Product demands (x103 kg)
Product
i1
i2
i3
k1
150
130
150
k2
200
220
250
J2
5
6
8
Sijl
J1
J3
7
4
5
J2
0.9
0.6
0.7
J3
0.6
0.5
0.5
0.4
0.4
0.4
Table 3. Raw material availability (x103 kg)
k3
115
130
150
Sites
R1
R2
R3
S1
S2
3,200
3,500
3,000
3,200
1,950
1,800
Table 4. Discrete sizes and costs of units and storage tanks
Cost jlV jl jl
Discrete units sizes (l)
Stages
J1
J2
J3
J1
J2
P1
P2
300
500
300
500
300
500
Storage Tanks
G1
G2
0
1500
0
1500
P3
P4
750
750
750
1000
1000
1000
G3
5000
5000
G4
10000
10000
P5
(x 103)
1200
1200
1200
L1
6
8
7
0.5
0.5
L2
9
6
10
L3
5
7
7
0.6
0.6
0.7
0.6
0.6
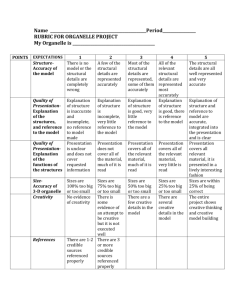
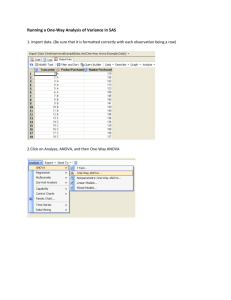
The optimal solution consists in only one plant that produces the 3 products. The plant
and the unit sizes are shown in Fig. 1 as well the number of batches (Nbi) and the total
production (Qi). A storage tank is allocated between stages 2 and 3, that is not used by
product 1. All the consumed raw materials arrive from site 1 and two warehouses are
installed. In the first row of Table 5 the investment and operative costs of this optimal
solution (S1) are given. In Table 6 the optimal network distribution is showed.
The same model without consider unit duplications and storage tank allocation is solved
in order to compare the significance of plant design in the overall SC problem
optimization. The optimal solution for this model consists in two plants: Plant 1
produces 392,920 kg of product 2 and 480,570 kg of product 3 with unit sizes of 1200,
1000 and 750 for stages 1, 2 and 3 respectively, and Plant 3 produces 465,000 kg of
product 1, 87080 kg of product 2, and 69430 kg of product 3 with unit sizes equal to
1000, 750 and 500 for stages 1, 2 and 3 respectively. In Table 5 the economical results
are shown (S2). The total annual cost is equal to $1406300 representing 28.6% bigger
that the optimal solution considering plant design.
5. Conclusions
This work has proposed a MILP model for the optimal production and distribution SC
problem taking into account plant design in the overall model. Unit duplication in phase
6
G. Corsano and J. M. Montagna
and out of phase as well as the allocation of intermediate storage tank where considered,
using discrete unit and tanks sizes in order to avoid nonlinearities.
The model was applied to a SC with four echelons and compared with a model where
plant configuration is not taken account. The importance of considering plant
configuration has been highlighted by using an example in which considerable savings
on the overall annual costs have been achieved, given not only by the investment costs
but also by the SC design.
Acknowledgment
The authors are grateful for financial support from CONICET and ANPCyT.
References
G. Guillén, F.D. Mele, A. Espuña, L. Puigjaner, 2006, Addressing the design of chemical supply
chains under demand uncertainty, Ind. Eng. Chem. Res., 45, 7566-7581.
J. Ryu, E. Pistikopoulos, 2005, Design and operation of enterprise-wide process network using
operation policies, Ind. Eng. Chem. Res., 44, 2174-2182.
N. Shah, 2005, Process industry supply chains: Advances and challenges, Comp. and Chem.
Engn., 29, 1225-1235.
P. Tsiakis, N. Shah, C.C. Pantelides, 2001, Design of multi-echelon supply chain networks under
demand uncertainty, Ind. Eng. Chem. Res., 40, 3585-3604.
V.T. Voudouris and I.E. Grossmann, 1993, Optimal synthesis of multiproduct batch plants with
cyclic scheduling and inventory considerations, Ind. Eng. Chem. Res., 32, 1962-1980.
Table 5. Investment and operative annual costs ($)
S1
S2
Plant
Investment
519,820
795,859
Tanks
Production
18,643
-
116,200
131,150
Raw
material
84,182
100,200
Warehouse
Transport
Total
109,450
109,450
245,500
269,670
1,093,795
1,406,329
Table 6. SC optimal design and product distribution for solution S1 (x10 3 kg)
From sites to Plant 1
Products
R1
R2
R3
From Plant 1 to
warehouses
M1
M3
i1
i2
i3
372
336
330
395
336
357
325
336
357
465
0
400
0
480
150
From warehouses to customers
K1
K2
K3
M1:150
M3:130
M1:150
M1:200
M3:220
M1:250
M1:115
M3:130
M3:150
V=1200 l
V=1000 l
V=500 l
V=1200 l
V=5000 l
Nb1 = 372
Nb2 = 240
Nb3 = 357
Nb1 = 372
Nb2 = 240
Nb3 = 357
Nb1 = 372
Nb2 = 384
Nb3 = 440
Figure 1. Plant design and production planning
Q1 = 465,000 kg
Q2 = 480,000 kg
Q3 = 550,000 kg