Lab 6-Root Locus
advertisement

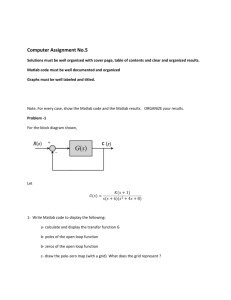
LABORATORY MODULE Control Principle (DNT 354/3) Semester 1 (2008/2009) Experiment 6: Root Locus Name :_________________________________________ Matric No. :________________ Name :_________________________________________ Matric No. :________________ School of Electrical System Engineering Universiti Malaysia Perlis (UniMAP) EXPERIMENT 6 ROOT LOCUS 1. OBJECTIVE: 1.1. To illustrate root locus responses using transfer function. 1.2. To study the effect of loop gain upon the system’s poles. 2. 2.1. INTRODUCTION Root locus of an open loop transfer function G(s) is the locus (plot) of all possible locations of the closed loop poles with unity feedback and proportional gain K that is varied from zero to infinity. Figure 1: Closed loop system with gain K and unity feedback The closed loop transfer function is T( s ) KGs 1 KGs and thus the poles of the closed loop system are values of s such that 1 +kG(s)= 0 If we write G( s ) bs as a(s)+ kb(s)= 0 Then this equation has the form of: a(s)+ kb(s)= 0 Or G( s ) as bs 0 k 2 Let n = order of a(s) and m = order of b(s). We will consider all positive values of k. In the limit as k goes to 0, the poles of the closed loop system are a(s) = 0 or the poles of the G(s). In the limit as k goes to infinity, the poles ofthe closed loop system are b(s) = 0 or the zero ofG(s). No matter what we pick k to be, the closed loop system must always have n poles, where n is the number of poles of G(s). The root locus have n branches, each branch starts at a pole of G(s) and goes to a zero of G(s). If G(s) has more poles that zeros, then there are n-m zeros at infinity 2.2. Matlab commands Matlab commands can be used to generate root locus plot: »rlocus(num,den) - calculates and plot the locus of the roots of 1 +kG(s)= 0 » [K,poles] = rlocfind(num,den) - find the gain K and its corresponding poles for a given roots locus. »sgrid(zeta, Wn) - draw lines (boundaries) of zeta and Wn. 3. PROCEDURE 3.1. Given the following transfer functions, plot the root locus. For each G(s) indicate the how many of poles, zeros and infinite zeros (if exist). 3.1.1. Gs 3.1.2. Gs 3.1.3. G s 1 3s 5s 1 2 5 s 3s 5s 1 3 2 s 2 6s 1 s 3 3s 2 5s 1 3.2. Using command ‘[K,poles] = rlocfind(num,den)’ find gain and its poles at these respective conditions. 3.2.1. At K → 0 when Gs 1 3s 2 5s 1 3.2.2. When move Gs both poles towards each other and meet for 1 . 3s 5s 1 2 3.2.3. When poles break away into the complex plane for Gs 3.2.4. When poles for Gs 6 . s 2s 8s 3 3 break away and enter 3 . 3s 4s 1 the 2 left plane 2 3 4. Name : ______________________________ Matrix No : ______________________________ Name : ______________________________ Matrix No : ______________________________ RESULT Teaching Engineer : ______________________________ 4 Name : ______________________________ Matrix No : ______________________________ Name : ______________________________ Matrix No : ______________________________ Teaching Engineer : ______________________________ 5 5. DISCUSSION 6. CONCLUSION 6