Updated 10/27/09
Static Tensile Test Theory
The purpose of this experiment is to observe the elastic and inelastic behaviors of a solid
under quasi-static (slowly varying) load. The test specimens consist of an aluminum
rectangular bar and an aluminum “dog-bone” shaped specimen which will be mounted in
the Instron Universal Testing Machine.
The rectangular bar will be pulled to ultimate failure while the dog -bone specimen will
be tested only within the elastic range. Strain gauges measuring axial and transverse
strain have been attached to the dog-bone specimen along with one strain gauge rosette.
Material properties of the aluminum bar will be determined from measurements of
applied stress, axial strain and transverse strain. Theoretical and known values will be
compared to those found experimentally.
SPECIAL NOTE: TAKE EXTREME CARE WITH THE DOG-BONE AS THE STRAIN GAUGES AND THEIR WIRES
ARE VERY DELICATE. IN PARTICULAR, THE GAUGES CAN BE UNATTACHED FROM THE DOG-BONE FAR TOO
EASILY. IT IS DIFFICULT AND TIME-CONSUMING TO ATTACH THE STRAIN GAUGES ONTO THE SPECIMEN.
Hooke’s Law
Robert Hooke, in 1687, published a work recognizing that the deformation of an elastic body is linearly
related to the applied force:
P K ,
(1)
where P is the applied force, K is the stiffness of the body, and is the change in length of the body. A
spring is, of course, an elastic body and the coiling of the spring just produces large and easily observable
elastic deformations for a short spring length. The form of Hooke’s Law, in one dimension, specified in
terms of stress and strain is Eq. (2):
E ,
where
=
stress (force per unit area) P/A, (psi, ksi, Pa, MPa)
=
strain (elongation per unit length) /L, (%, in./in., in./in., mm/mm., m/mm)
E
=
Young’s modulus (psi, ksi, N/m2, Pa, MPa, GPa)
Page 1 of 6
(2)
Updated 10/27/09
The primary advantage of Eq. (2) over Eq. (1) is that the proportionality constant E, is a material
parameter. All aluminum alloys have approximately the same Young’s modulus. The stiffness, K, on the
other hand, depends on E and the particular geometry of the body.
As one might expect, stretching a body in one direction produces a contraction in the transverse
directions. The relationship between the axial elongation to the transverse contraction is linear, with
constant of proportionality given by Poisson’s ratio, Eq. (3):
y
x
z
(3)
where
y
x , z
=
=
normal strain in direction of the applied stress,
normal strains in the transverse directions.
If volume were conserved under deformation, would be 1/2 for all materials; however, volume is not
usually conserved. For most isotropic structural materials in elastic range, is between 1/4 and 1/3,
representing a slight volume increase under tensile loading, and a decrease in volume under compressive
loading.
Strain Gauges
Metal-foil electrical-resistance strain gauges are widely used sensors for measuring strain at a point on
the surface of a body. The gauge is essentially a long, thin conductor zig-zagged many times so as to
produce a large total change in length in a small area. Each gauge is bonded to the surface of the piece to
be tested so that the elongation or contraction of the gauge follows the deformation of the test piece. The
electrical resistance (R) of a length of wire is given by Eq. (4)
R
L
A
(4)
where
=
resistivity of the conductor metal,
L
=
conductor’s length,
A
=
conductor’s cross-sectional area.
If the gauge is subjected to stretching, the length not only increases, but the cross section contracts, so the
resistance increases because of dimensional changes. This change in resistance is measured with a
Wheatstone-bridge circuit that produces a voltage proportional to strain.
2 of 6
Updated 10/27/09
The gauge factor, F, is the fractional change in resistance per unit of strain in the gauge-length direction.
This value differs from one gauge to another and must be set into the Strain Indicator before making
strain readings. Because our gauges are all of the same type, with a nominal 120 resistance, the gauge
factors vary only slightly and an average F value of 2.0 is appropriate for all ten gauges.
Since the resistance of strain-gauge wire is temperature-dependent, the proper use of strain gauges must
compensate for temperature variations. A common way of doing this is to employ a dummy gauge, a
duplicate of the measuring gauge, placed close to the latter, but not glued to the test-piece surface and
therefore not subject to elongation/contraction from applied stress. In the bridge circuit, the resistance
change of the dummy (due only to temperature effects) eliminates the temperature effects in the active
gauge. Our strain gauge, however, is self temperature-compensated to match the model material, in this
case aluminum. This provides a great gain in convenience at a slight sacrifice of accuracy since the
temperature change in our laboratory seldom exceeds 2F during a lab period.
Strain gauge rosettes are arrangements of three strain gauges. The strain gauges in the rosette are
oriented at precise angles relative to one another, and the rosette is useful in determining normal, shear,
and principal strains under multi-axial loading conditions (as opposed to simple uniaxial tension). Using
the rules of strain transformation, the measurements of normal strain along any three lines passing
through one point may be used to determine the normal (x, y) and shear strains (xy) at the intersection
point along the x and y axes of a typical Cartesian coordinate system.
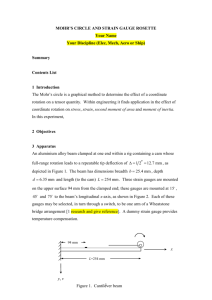
Transformation of Strain (Beer et al., 2002)
Figure 1: The normal strain measurements along three intersecting lines may be used to find the strain along the x and y
axes.
Strains are measured with respect to a particular coordinate system. Frequently, we would like to know
the strain relative to another coordinate system. Referring to Figure 1, the coordinate transformation
rules for strain are given by Eq. (5):
x cos2 y sin 2 xy sin cos
(5)
in which is the normal strain at an angle from the x-axis. The substitution of 1, 2, and 3 of the
rosette strain gauges into Eq. (5) for provides three equations for solving three unknown values, x, y,
3 of 6
Updated 10/27/09
and xy. NOTE: 1, 2, and 3 refers to the labeling convention of Figure 1; for this experiment, 1, 2,
and 3 refer to the angles at which strain gauges #2, #3, and #4 are mounted to the test specimen, see
Figure 2.
Figure 2: The strain gauge configuration of the aluminum test specimen.
After solving for x, y, and xy, the principal strains p and q are given by the equation below (refer to
Mohr’s circle):
p ,q
x y
2
y xy
,
x
2 2
2
2
(6)
and the angle between the principal axis to the first strain gauge (i.e., from the principal axis to the strain
gauge along 1) is found with the following equation:
p ,q _ to _ straingauge
xy
1
.
tan 1
2
y
x
(7)
Using the principal strains and a generalized form of Hooke’s Law for plane stress, the principal stresses
are
p
E
p q
1 2
(8)
q
E
v p q .
1 2
(9)
and
4 of 6
Updated 10/27/09
Assignment Questions
1. For the rectangular bar brought to failure, what is the break angle? What would the ideal angle
be? What kind of ultimate failure occurred?
2. Plot the stress-strain curve of the rectangular bar labeling important regions and points. Would
this be engineering stress or true stress? What are the limitations of this curve? (Hint: Why do we
normally use a dog bone to do analysis?)
3. Pick one of the trials for the dog-bone and plot the data from all five strain gauges on one graph.
Determine which strain gauge corresponds to which data channel.
4. Using the axial strain gauge measurements on the dog-bone, plot the stress-strain curve for each
of your 3 sample trials. Add a linear trend line to each set of data and determine Young’s
modulus for the material (don’t forget to estimate the uncertainty in the Young’s modulus).
Should you force the regression to include the point (0,0)? Are the deviations from the line
randomly distributed? And if so, what is the significance of this observation?
5. Plot transverse vs. axial strain for each of the three trials. Find the best fit line for each trial and
from this determine Poisson’s ratio.
6. Calculate the axial stress and strain from the load and extension data from the Instron. Plot the
stress-strain curve from both your extension and strain gauge data and compare the two Young’s
modulus. Why are the two moduli so different? What are the limitations of the Instron?
7. Find the textbook value of Young’s modulus and Poisson’s ratio for 6061-T6 aluminum. What
does T6 mean and what is the composition of 6061 aluminum?
8. Construct 95% confidence intervals for the mean Young’s modulus and Poisson’s ratio based on
your strain gauge data. Are the differences in experimental and theoretical values within your
confidence intervals?
9. What are the most likely sources for errors in the measurement system? Can you quantify them?
10. Using the data from strain gauges #2, #3, and #4 (REFER TO FIGURE 2 FOR CORRECT
NUMBERING), determine the axial and transverse strains. Plot the stress strain curves for the
axial and transverse strains as well as the strains from strain gauges #0 and #1. Comment on any
differences.
11. Convert your principal strains from both the rosette and linear strain gauges into stresses using
your experimentally derived values for E and . Compare these stresses to the applied stresses
provided from the experimental tests. Comment on any differences.
5 of 6
Updated 10/27/09
References
1. J.P Holman. Experimental Methods for Engineers. New York, NY. McGraw-Hill, 1989.
2. Popov. Engineering Mechanics of Solids. Englewood Cliffs, NJ. Prentice-Hall, 1990.
3. Metals Handbook. 8th Ed., Vol. 1, p. 946.
4. Ferdinand Beer, E. Russell Johnston, Jr., John DeWolf. Mechanics of Materials. New York,
NY. McGraw-Hill, 2002.
6 of 6
 0
0