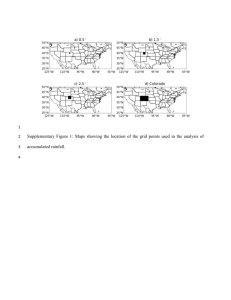
Erin - CAPS - University of Oklahoma
advertisement

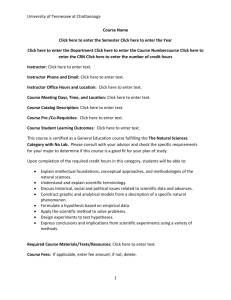
Multiple-Doppler Radar Data Assimilation using GSI with Cloud Analysis and Objected-based Precipitation Forecast Verification for Tropical Storm Erin (2007) through its Inland Reintensification Phase Kefeng Zhu1,2,3, Yi Yang2,3, Ming Xue2,3 , Shouting Gao1, Steven Weygandt3, Ming Hu3 and Stan Benjamin3 Laboratory of Cloud-Precipitation Physics and Severe Storms (LACS), Institute of Atmospheric Physics, Chinese Academy of Sciences, Beijing, China1 Center for Analysis and Prediction of Storms2 and School of Meteorology3 University of Oklahoma, Norman Oklahoma Global System Division, Earth System Research Laboratory, NOAA4 January, 2010 Submitted to Weather and Forecasting Corresponding author address: Dr. Ming Xue Center for Analysis and Prediction of Storms University of Oklahoma 120 David L. Boren Blvd, Norman OK 73072 mxue@ou.edu Abstract Tropical storm Erin (2007) unexpectedly reintensified in western Oklahoma from 0000UTC to 1500UTC 19 August 2007. When Erin moved across the Oklahoma, the evolution and dissipation was well captured by the radar situated in the Oklahoma State. And the data collected by these Doppler Radars provided a good database to examine the performance of multiply Radar observation in the high resolution data assimilation system. In this paper, the impact of different part of radar data on the short range precipitation forecast is studied. The radar radial winds were assimilated through three dimensional variation packages in the Grid-point Statistical Interpolation (GSI) system. And three-dimensional radar mosaic reflectivity is analyzed by the implemented cloud analysis package embedded in the GSI system. The assimilation of radar radial winds improve the rain band structure prediction while the assimilation of reflectivity is found to be associated with the heavy rain center location in the first few hours forecast. With both radar radial winds and reflectivity assimilated, the experiment has the best extreme centre location of six hour accumulated rainfall. In order to better understand the assimilation system, two key parameters were also examined: the configuration of horizontal de-correlation scale factor and the cloud analysis option. The former is key parameter for acquiring reasonable error structure space distribution and the latter is semi-empirical microphysical approach for retrieving the hydrometeors fields from the radar reflectivity. In additional, the neighborhood and object-based verification method within the Model Evaluation Tools (MET) are employed for the verifying and identifying. Through the comparison of neighborhood verification scores with and without radar radial winds assimilation, it is found that experiment with radial winds data significantly upgrades the forecast skill. The object-based verification method is introduced to better describe the bending structure difference among the forecasts. The total interest calculated from the resolved and matched objects is used for determining the similarity between the forecast and observation. Meanwhile, the object-based storm moving path which represents the mobile centriod of rain cluster is computed. The verification results suggest the assimilation of both radar radial winds and reflectivity have the best performance not only in the rain band structure prediction but also the location of the heavy rain cluster. 1. Introduction The insufficient information of Single-Doppler Radar in the three dimensional wind fields is always an issue in the directly assimilation of radar radial winds. MultipleDoppler Radar observation to some extent can relieve such problem in the cross section region. The overland restrengthening and dissipating of tropical storm Erin (Arndt et al. 2009) happened to occur over a region equipped with dense observation, and more important, within the observation range of four Doppler Radar located in the Oklahoma state. This provides a good opportunity to study the performance of Multiple-Doppler Radar of both radar radial winds and reflectivity in the high resolution data assimilation system. The use of semi-empirical microphysical methods to retrieve hydrometeors field from the radar reflectivity is a common way in the reflectivity data assimilation. The GSI convective cloud analysis package was implemented from the ARPS (Advanced Regional Prediction System) cloud analysis (Xue et al. 2000; Xue et al. 2001; Xue et al. 2003). More details of ARPS cloud analysis can be found in the Jian Zhang dissertation(Zhang 1999). And the latest improvement of in-cloud temperature adjustment and the way of retrieving hydrometeors fields from radar reflectivity were described in the MingHu’s paper (Hu et al. 2006a). Encouraging results with radar radial winds assimilated by the ARPS 3DVAR and the radar reflectivity through cloud analysis procedure have been achieved. In MingHu’s study, with both type of radar data assimilated, the forecasted lower level vorticity centers associated with tornadoes were largely improved (Hu et al. 2006b). Recently, the ARPS 3DVAR with the cloud analysis package was applied to predict hurricane IKE (Zhao and Xue 2009). It was found the radar radial winds improved the track forecast while the reflectivity improved the intensity forecast. Similar results could be found in this study. Although the experiments using the ARPS 3DVAR with cloud analysis has been proved to be successful, the experiment using GSI with the implemented cloud analysis package with both type of radar data assimilated in the high resolution system are relatively new. Initial tests with radar reflectivity data and surface observation assimilated employing the GSI with and without cloud analysis procedure in the 9km resolution have been made(Hu and Xue 2007). More experiments to examine the capability of GSI with full package cloud analysis package in the prediction of serve weather event with both radar reflectivity and radar radial winds assimilated are still needed. In addition, the Model Evaluation Tools (MET) (Brown et al. 2009) developed by the National Center for Atmospheres Research (NCAR) Development Testbed Center (DTC) will be used for the verification purpose of Erin. The narrower band in the west-to-east and relatively longer in the south-to-north feature of Erin’s rain band makes the traditional forecast-observation verification method unreasonable especially when the forecasted system was mis-displayed half degree away from the observation and surrounded by the fake rain produced by the unresolved model properties. The neighborhood (Ebert 2008) verification method which verifying the grid within a range can reduce such displacement error a little bit but cannot distinguish the structure difference between the forecast and the observation. The object–based (Davis et al. 2006a; Davis et al. 2006b)verification methods, however, determine the difference between forecast and observation based on the resolved and matched objects properties. It is a prospective way to study the impact of different part radar data especially when the forecast result comes out with big outline differences. In this paper, the pre-process of radar velocity data and the experiments design will be briefly introduced in section 2. In section 3, the compassion between different horizontal correlation scale factors for the radar radial winds and different microphysics approach for retrieving the hydrometeors fields from the reflectivity data will be discussed. A detailed comparison among various experiments and its verification for quantity precipitation will be presented in section 4, and the results are further discussed and summarized in section 5. 2. Radar radial winds data preprocess and experiment design a. Radar radial winds preprocess Four Doppler radars KFDR, KTLX, KVNX and KINX along the Erin moving path which situated in the Oklahoma states were collected (see Fig.1). These data were first preprocessed by an automatic data quality control package 88D2ARPS of the ARPS model but with the input interface modified to the WRF background and output interface to the GSI (rename to 88D2GSI below). This data quality control module includes velocity dealiasing, ground clutter contamination and shielding removal, etc(Eilts and Smith 1990). In case the 88D2GSI failed to clean the data, manual interactive software SOLO developed by the National Center of Atmosphere Research (NCAR) was used to remove the rest cluster or unfolded velocity. The data after QC were then read in by the 88D2GSI and super-obed to the model grid using the least square method: A a0 a1 x a2 x 2 a3 y a4 y 2 a5 xy a6 z (1) Where A is the analyzed variable, ai are the polynomial coefficients and x, y and z are the distance of radar observed points to the model grid in the horizontal and vertical coordinate respectively. b. Brief introduction of Erin and design of experiments Erin began as Atlantic Tropical Depression Five (2007). Throughout its existence over open water, its sustained winds never exceeded 18 m s-1, and its lowest reported central pressure was 1003 hPa. But during the day immediately following Erin’s landfall, it unexpectedly and dramatically reintensified from 0000 UTC through 1500 UTC 19 August 2007 over western Oklahoma which is approximately 500 miles inland from the Gulf of Mexico (see Fig. 1 (a)). It reached its peak intensity between 0600 UTC and 1200 UTC. Fig. 1 (b) shows the lowest sea level pressure measured by the Oklahoma mesonet site and Fig. 1 (c) shows the mean value of sea level pressure of all mesonet observation. The minimum value of sea level pressure recorded by these mesonet sites was near 999 hPa at 0725 UTC while the lowest average value was near 1009 hPa between 0800 UTC to 1100 UTC. During 0900 and 1300 UTC, an eye-like feature can be clearly indentified in WSR-88D radar imagery. However, this episode was short-lived and the eye-like feature dissipated around 1300 UTC. After 1800 UTC, Erin degenerated into a remnant low pressure area as the circulation dissipated over northeastern Oklahoma. All the experiments were initialized with the NAM background from the 0000 UTC 19 Aug 2007 and ended at 1800 UTC 19 Aug 2007. The experiments with data assimilation were started from 0000 UTC with radar data assimilated every 10 minutes for 2 hours long. The model domain is 881x881x41 grids with horizontal space resolution 3km. The Noah land-surface model was employed and the cumulus parameterization was turned off in WRF (Weather Research and Forecast) forecast. The model microphysical scheme was depended on the cloud analysis option applied in the GSI. Tabel. 1 lists the experiments for testing the configuration in GSI and also the experiments for examining the impact of different parts of radar data on the short range precipitation forecast. Experiment start from the 0000 UTC without the data assimilation was named as ‘CTR00’. Experiment with both radar radial winds and radar reflectivity data assimilated is named as ‘CTRRAD’. ‘CTRRAD10’ means the horizontal decorrelation scale used in GSI was 10 times larger than the ‘CTRRAD’. And the ‘CTRFER’ denotes the Ferrier microphysical scheme is chosen for retrieving the hydrometeors fields from the radar reflectivity in the cloud analysis procedure in GSI. Experiment with only superobed radar radial winds assimilated by three dimensional variation (3DVAR) package of GSI is named as ‘VEL’. And ‘REF’ represents experiments with only radar reflectivity data assimilated. This kind of three dimensional mosaic reflectivity data was produced by the National Serve Storm Laboratory (NSSL). 3. Configuration test In this section, two key parameters: horizontal de-correlation scale factor for determining the radar radial winds error space distribution in the 3DVAR procedure and the cloud analysis option for retrieving the hydrometeors like rain, snow and hail from reflectivity were examined. Comparison between different groups of horizontal decorrelation scale factors has been made. The analyzed fields were remapped to radar coordinate through the radar emulator and verified against the radar observation in the same elevation angle. Three different cloud analysis approaches available in the current GSI were introduced. Detail quantity analysis was described below. a. The configuration for radar radial winds The background error covariance and its correlation scale are two of the main factors in obtaining reasonable analyzed fields. In GSI, the initial values of the background error covariance and its correlation scale were given by the statistic results of North American Mesoscale Model (NAM). Both can be rescaled through the parameters in the GSI. Traditional observation like the surface or the sounding observation may represent the prosperities of synoptic scale weather system while the radar data observation may reveal cloud scale characteristic for the local convective system. The former should have the influence radius over several hundred kilometers and the latter may only affect the nearby grids. For this study, the sensitive of radar radial winds to the horizontal de-correlation scale factor was illustrated. In GSI, the statistical background error covariance and its correlation scale are the function of latitude and height. The one adopted by the experiments in this paper was ranged from have 2.5 oS to 89.5 oN with horizontal space resolution of 1 deg and 60 levels for vertical. The observation innovation together with the background error covariance structure was spread through the recursive filter. GSI employs four-degree recursive filter three times in horizontal with influence radius increased for each loop and single time in vertical. Fig. 2 (a), (c) and (e) show the analysis results of three groups horizontal de-correlation scale factors (named ‘hzscl’ below) for a single-point xcomponent wind analysis. 5m/s observation increment was introduced at 700 hPa level over the Erin’s track center of 0600 UTC. When hzscl=0.006, 0.012, 0.024, the actual influence radius plotted in the Fig. 2 (a) was approximate 4 grids. When these parameters enlarge for ten times, the influence radius was extended to 20 grids or so (see Fig. 2 (c)). The adoption of the same configuration as the current RR setting for the traditional observation hzscl=0.373, 0.746, 1.5 is obviously too large for the assimilation of radar radial winds (see Fig. 2 (e)). Fig. 2 (b), (d) and (f) depict the single-time analysis of four Doppler Radars radial winds using the hzscl as (a), (c) and (e) respectively at 0600 UTC 19 Aug 2007. With influence radius no more than 4 grids, the smallest group parameters of hzscl was able to keep some small scale information like convergence of the wind fields (see the red line in Fig. 2 (b)). The maximum wind vector speed for this analysis is 39.5 m/s. Usage of larger value of hzscl, spread the increment within a far range, over-smooth the cloud scale information. The analyzed wind fields come out much smoother with large circulation. The analyzed maximum wind vector speed is 33.9 m/s and 27.6 m/s for the middle and largest parameters. The maximum value decreased significantly when the horizontal decorrelation scale factor increased. Notice the increments outline for a single-point test is not a standard circle. That was due to the map projection of the model domain. The recursive filter in GSI uses the large-circle distance of earth as the cut of radius of decorrelation scale. To better distinguish the difference between the observation and assimilation results, the simulated radar radial winds at elevation angle of 0.38o through the radar emulator was plotted in Fig. 3. The center point location is as the KTLX. With several maximum centers scattered in the positive speed region, the observation looks much noise (Fig. 3 (a)) when compared to the NAM background (Fig. 3 (b)). The latter appears smooth with a single extreme value center. The observed minimum and maximum radial winds speed was -31.5m/s and 32.5m/s. Obviously, with minimum -23.4m/s and maximum 25.8m/s the NAM background underestimates the radial winds. The assimilation of radar radial winds with smallest configuration as Fig. 2 (a) increase the absolute value, the analyzed minimum and maximum radial speed is -27.82 m/s and 27.80m/s respectively. And meantime, the simulated radial winds profile looks more similar with the observation especially in the boundary area. The assimilation employing the middle parameters of hzscl as Fig. 2 (c) filters out the center of maximum radial winds in the positive speed area. While the configuration used for traditional data was used, the general pattern surrounding the center of KTLX was changed a lot. RMSE against the observation was calculated to better determine the value of hzscl. And RMSE against the NAM was computed to see the impact of different configurations. RMSEobs RMSEnam n (x o ) i 1 i 2 i /n n ( x xb ) i 1 i i 2 /n Where the xi represents the simulated radar radial winds, xbi denotes the simulated results using NAM background as environment for the radar emulator and oi is the observed radar radial winds. The RMSEobs for the NAM background ground is 3.9589m/s and 3.6388m/s after assimilation of radar radial winds using the smallest hzscl. When the same setting as the traditional data was adopted, RMSEobs is 5.4021m/s. The RMSEnam is 1.7403m/s, 2.2987m/s and 2.8445m/s for the hzscl of Fig. 2 (a), (c) and (e) respectively. The bigger value of hzscl means farther influence radius and the increment of local wind vectors will be spread to more surrounding grids through the recursive filter. Therefore, the RMSEnam is largest when biggest value of hzscl was employed. Since the radar radial winds represent the small scale weather system, it may not be reasonable for larger value of hzscl. In this paper, we chose hzscl=0.006, 0.012, 0.024 as the default value for radial winds. The comparison of forecast results with different hzscl will be present in the next section. b. The different microphysical analysis approaches for retrieving hydrometeors from reflectivity in GSI Before retrieving hydrometeors from the reflectivity, precipitation types were first classified on the basis of the grid reflectivity (GREF below) and wet-bulb temperature (Tw below). In GSI, it is categorized into six types: ‘No rain’ if GREF is below 0 dbz; ‘rain’ if Tw >=1.3 oC; if 0.0 oC <Tw <1.3 oC, it takes the value of nearest up-level precipitation type; if Tw is below 0.0 oC , it defined as ‘snow’ or ‘freezing rain’ or ‘sleet’ depending on the nearest up-level precipitation type; the precipitation type is further updated to ‘hail’ when GREF is larger than 50 dbz. After that, the mixing ratio of hydrometeors material ‘rain’, ‘snow’ and ‘hail’ are calculated from the different reflectivity factor equations depending on the precipitation type and environment temperature. Tabel. 3 lists three available options: Thompson (Thompson et al. 2004), Ferrier (Ferrier 1994; Ferrier et al. 1995) and KRY (Kessler 1969; Rogers and Yau 1989) for retrieving the hydrometeors field in the current GSI cloud analysis package. The KRY method was empirical warm-rain theory While Thompson and Ferrier were semi-empirical microphysical scheme. The calculation in the KRY option is simple: if the precipitation type classified as rain or freezing rain, the mixing ratio of rain water will be retrieved from the formula Z r listed in KRY column in Table.3; if the precipitation type classified as snow, the mixing ratio of snow will be retrieved from the formula Z s listed in the KRY column in Tabel. 3; if the precipitation type classified as sleet or hail, the mixing ratio of hail will be retrieved from the formula Z h listed in KRY column in Tabel. 3. On the other hands, the calculation for the Ferrier option is much more complicated. Not only the precipitation type but also the grid temperature is considered. If the precipitation type is rain or freezing rain, it retrieves the rain water mixing ratio using equation Ferrier’s Z r in the Tabel. 3. If the precipitation type is snow, when the grid temperature (T below) is below 0 oC, it retrieved the snow mixing ratio (calculated from dry snow formula) using equation Ferrier’s Z s in the Tabel. 3; when T is between 0 oC and 5.0 oC, it divided the reflectivity into the contribution of snow and rain, and then the mixing ratio of snow (calculated from wet snow formula) and rain will be calculated from the corresponding equations; when T is above 5.0 oC, only rain water mixing ratio are retrieved. If the precipitation type is sleet, when T is below 0 oC, it retrieved the hail mixing ratio using equation Ferrier’s Z h in the Table.3; when T is between 0 oC and 10.0 o C, it divided the reflectivity into the contribution of hail and rain, and then the mixing ratio of hail and rain will be computed from the corresponding equations; when T is above 10.0 oC, only rain water mixing ratio are retrieved. When the precipitation is unknown, the procedure was treated as the precipitation type of snow. Both the KRY and Ferrier methods are calculated in the region of grid reflectivity above 0dbz. The rests of the domain are set to the missing value. The calculation in Thompson is similar to Ferrier but using different reflectivity factor equation to retrieve the hydrometeors. And the threshold used for Thompson is 10dbz, that is to say the calculation is limited in the region of grid reflectivity above 10 dbz. Fig. 4 plots retrieved hydrometeors material based on the different reflectivity factor equations. For fair comparison, the minimum reflectivity value was given as 10dbz for the rain, snow and 50dbz for hail. And if Thompson scheme was employed, the mixing ratio of snow is also a function of temperature when below zero point. The snow mixing ratio retrieved from dry snow increased as temperature decrease. We set -5 oC for this comparison. The curve indicates the retrieved mixing ratio of hydrometeors fields from Thompson scheme have the largest value of all. The retrieved mixing ratio of rain, hail and wet snow from KRY is larger than from Ferrier. But Ferrier has larger retrieved mixing ratio of snow value than KRY. When grid reflectivity is 10dbz, the retrieved value of rain water mixing ratio is 0.076 g/kg, 0.010 g/kg and 0.011 g/kg for the Thompson, Ferrier and KRY respectively. When grid reflectivity is 50dbz, the retrieved value of rain water mixing ratio is 2.85 g/kg, 1.92g/kg and 2.11g/kg for each option; and is 4.48g/kg, 4.11g/kg and 1.20 g/kg if calculated from dry snow equation and is 3.47g/kg, 0.13 g/kg and 1.20 g/kg if calculated from the wet snow equation. The retrieved value of hail mixing ratio is 1.59 g/kg, 0.26 g/kg and 1.20 g/kg for each option. And when the grid reflectivity is 75 dbz, the retrieved value of hail mixing ratio is 16.87 g/kg, 8.17 g/kg and 16.4 g/kg. In the following section, the forecast result using the retrieved formula of Thompson or Ferrier will be presented. 4. Results/verification In this study, the NCEP 4-km gridded Stage IV precipitation data are used as observation. The forecasted hourly rainfall with part of radar data and with full radar data assimilation is verified against the Stage IV data. The performance of multiple Doppler radar data on the short range precipitation forecast is presented. And the forecast results employing different configuration mentioned in the above section are briefly described. Two verification methods in the MET software are applied and discussed. a. The forecasted results Erin was an asymmetric with its main precipitation dropped in the southeast part of the system. At 0950 UTC, radar reflectivity observations displayed the first appearance of an eye like feature (not show here). At 1200 UTC, this eye like features can still be clearly identified in the radar map (see first row of Fig. 5). After that, the eye expanded in size and began to dissipate. Experiment ‘CTR00’ started from 0000 UTC without data assimilation fails to forecast the eye like features (see second row of Fig. 5). The forecast reflectivity region slanted to the Oklahoma south boundary when compared with the observation. At 1800 UTC, the forecasted reflectivity was situated in the west boundary of the observation which indicates the forecasted storm was moving a little bit slow. At 0600 UTC and 0900 UTC, the angle of forecasted reflectivity y-axes was rotated to the south-to-north after the radar radial winds assimilated (see third row of Fig. 5). Although the ‘VEL’ unable to predict the eye like features, the bending structure at 1200 UTC was well depicted. The simulated storm was heading east faster than the one without data assimilation (see the third row of Fig.5 at 1500 UTC). When only reflectivity assimilated, an eye like feature could be identified at 1200 UTC (see the fourth row of Fig. 5). However, the simulated eye is larger than radar observed. Without the help of radial winds, the forecasted reflectivity of ‘REF’ was unable to form the continuous spiral structure but with many isolated storm scattered in and around the main precipitation object. The shape at 0600 UTC is mostly similar to the observation with several tails extended from the main body. But the forecasted object is larger in size when compared to the observation. With both type of radar data assimilated, the experiments ‘CTRRAD’ successfully captured the eye like feature of the storm (see the fifth row of Fig. 5). The forecasted reflectivity spiral characteristic is much more continuous and compact than the ‘REF’. And forecasted reflectivity outline at 1500 UTC was significantly improved. At 1800 UTC, the forecasted storm of ‘CTRRAD’ is closest to the observation among all the experiments tested in this study. As stated earlier, the forecasted result of experiments ‘CTRRAD10’ and ‘CTRFER’ were presented. The former uses almost the same configuration as ‘CTRRAD’ but with horizontal de-correlation scale factor enlarged for 10 times during the 3DVAR procedure of GSI. As ‘CTRRAD’, the later employs the Ferrier instead of Thompson option to retrieve the hydrometers fields from reflectivity during the cloud analysis procedure of GSI. And the microphysical scheme adopted in the WRF integration was changed to the Ferrier scheme. The analyzed results in the above section shows using the parameters of Fig. 2 (c) may over-smooth small scale information within the radial winds and further reduce the radial winds impact on the forecast. Since the analyzed quantity of mixing ratio of rain, snow and hail is much smaller than the Thompson option, the forecasted storm intensity was expected to be weaker than the experiment ‘CTRRAD’. At 1200 UTC, the simulated results for both experiments have no eye like features. On the contrary, with the larger horizontal de-correlation scale, the impact of radar radial wind seems a little bit delay. At 1800 UTC, ‘CTRRAD10’ displayed an eye like circulation. Fig. 6 (a) shows the predicted minimum mean sea leave pressure for all the experiments except the ‘CTRRAD10’. The NHC best track data were chosen as the observation. The plot starting point is 0600 UTC which is 4 hours forecast for the experiments with radar data assimilation and 6 hours forecast for the experiment without data assimilation. The Erin’s best track data for the minimum mean sea level pressure was obtained from the mesonet observation: ‘…An Oklahoma Mesonet site located seven miles west of Watonga (about 50 n mi northwest of Oklahoma City), reported sustained winds (5-minute average) of 47 kt near 0725 UTC, with sustained winds of gale force occurring there much of the time between 0600 and 0800 UTC. Also, at 0725 UTC, this station measured a surface pressure estimated to be equivalent to 999 mb at sea level, so the minimum central pressure was likely lower than that observation and is set to 995 mb at 0600 UTC in the best track…. ‘.At 0600UTC, the WATO site was located north-toeast of the Erin’s tropical storm center. Since the best track was given at 6 hours interval, the mean sea level pressure for this assumption was reasonable. Fig. 1 (b) and (c) draw the minimum mean sea level pressure and average value of mean sea level pressure for all the Oklahoma mesonet sites respectively. The time frequency is 5 minutes. As described in the NHC tropical storm Erin’s report, the lowest mean sea level pressure measured by the mesonet site during the reintensification process was ~999mb at 0725UTC. However, the minimum average value of mean sea level pressure was found between 0900 UTC to 1200 UTC which indicates the storm reaches its peak intensity among 0900 UTC to 1200 UTC. The average value of mean sea level pressure is 1010.4 hPa at 0600 UTC and is 1009.8 at 1200 UTC. Therefore, the center pressure tendency of Erin should drop from 0600 UTC to 1200 UTC and reach its peak intensity between 0900 UTC to 1200 UTC. This deduction could be further illustrated by the radar reflectivity observation. As mentioned above, the radar observation first displayed eye like feature at 0950 UTC. At 1200 UTC, this eye like feature could still be clearly identified through the radar map. Among all the experiments, the ‘CTRRAD’ with radial winds assimilated and with reflectivity analyzed through Thompson option and using Thompson microphysical scheme during the WRF integration have gotten the peak intensity. ‘CTRFER’ which employed Ferrier methods for retrieving the hydrometeor fields and uses Ferrier microphysical scheme in the model forecast is obviously weaker than ‘CTRRAD’. Experiment ‘CTR00’ started from 0000 UTC without any data assimilation underestimated the intensity. Assimilation of radar radial winds strengthened the intensity of the storm a little bit but did not reach the intensity as the observation. The assimilation of reflectivity significantly decreases the mean sea level pressure with the average reduction of 9hPa when compared to the ‘CTR00’. The contribution of radar radial winds to the intensity is smaller with 0.5 hPa on average. And when both data assimilated, the mean sea level pressure was dropped about 12hPa on average. Based on the analyzed results in the above paragraph, the observed mean sea level pressure will be probably lower at 1200 UTC than 0600 UTC. Therefore, the forecasted intensity error at 1200 UTC should be no more than 5 hPa. The forecasted tracks and track errors together with best track data were depicted in the Fig. 6 (b). The best track was plotted every 6 hours from the 0000UTC to 1800 UTC with dashed line between 0000 UTC to 0600 UTC. All the forecasts were plotted with 3 hours interval but start from 0600 UTC. The predicted storm moving speed was slower than the observation. At 0600 UTC, four hours (six for the ‘CTR00’) forecasted track errors is 107.6km, 136.9km, 87.7km, 112.9km and 89.2611km for experiments ‘CTR00’, ‘REF’, ‘VEL’, ‘CTRRAD’ and ‘CTRFER’ respectively. The track of experiment ‘CTR00’ without any data assimilation was far too north when compared with the observation. The assimilation of radial winds drives the system closer to the observation. The track errors were reduced ~20km at 0600 UTC. The assimilation of radar reflectivity data only, however, over-drives the system to the Oklahoma south boundary. The track error of ‘REF’ was 49.2km larger than ‘VEL’. With the help of radial winds, the predicted storm center was moved upwards and the track error of ‘CTRRAD’ was corrected for about 34km. The power for dragging the system to the southeast may due to southeast location of precipitation region in the Erin. The assimilation of reflectivity not only introduced the hydrometeors fields which help to reduce the spin up time for the precipitation, but also brought plenty moisture in that area. The assimilation of radar data accelerates the storm moving speed. During 0600 UTC to 1200 UTC, the observed storm center was moved to northeast for about 99.5km while the experiments ‘CTR00’, ‘REF’, ‘VEL’, ‘CTRRAD’ and ‘CTRFER’ are 73.4km, 130.5km, 123.5km, 152.6km and 99.3km respectively. Among all the experiments, the experiment ‘CTRRAD’ was moving fastest. At 1200 UTC, the ‘CTRRAD’ predicted storm center was very closer to the observation with only about 38.3km. This was minimum track error among all the experiments during the forecast. After that, the predicted storm moved across the observation path and continued to head northeast. The 16 hours track errors for the ‘CTRRAD’ was 65.9km. b. Applied the neighborhood method to the precipitation verification Precipitation verification is helpful for identifying the impact of different kinds of observation on the short range forecast. Traditional point-to-point based verification may get lower value when the predicted system have position deflection. The neighborhood verification method which computes matched point within a range can reduce the displacement errors in a measure. The formulas of verification scores used in this study are listed below. PODY n10 n n11 n n11 11 , FAR 10 , CSI n11 n01 n.1 n11 n10 n01 n11 n10 n1. Where the counts n11, n10, n01, and n00 denotes “Hits”, “False alarms”, “Misses”, and “Correct rejections” respectively. Details of how to calculate the counts using the neighborhood method of each point can be found in (Ebert 2008) . Fig. 7 (a)-(f) show the six hour accumulated rainfall from 0600 UTC to 1200 UTC and (g)-(h) plot the corresponding verification scores. The forecasted six hours accumulated extreme value center of ‘CTR00’ is southerly to the observation. The assimilation of reflectivity data, with the help of retrieved hydrometeor fields rain, snow and hail, correct the maximum rainfall center. However, it introduces fake rain cluster surrounding the heavy rain center. This leads to higher FAR (false alarm rate, a perfect forecast would have value 0) value of ‘REF’ when compared with the ‘CTR00’. The assimilation of radial winds data, on the other hands, help the system to be well organized and further improve the structure. The outline of precipitation area is mostly similar to the observation. When lower threshold 5mm was adopted, the ‘VEL’ with improvement in the structure forecast and with clean forecast, got the highest CSI (Critical Success Index, also named as Threat Score, a perfect forecast would have value 1) score. But without the reflectivity data, the predicted heavy rain center is like the ‘CTR00’. This caused the CSI drops relatively when higher threshold was employed. The experiment ‘CTRRAD’ with both type radar data assimilated is able to depict the heavy rain center successfully. However, similar to the experiment ‘REF’, the ‘CTRRAD’ have higher FAR value and lower CSI score when compared with the experiments with reflectivity data excluded. When higher threshold 50mm was used, the PODY (Probability of Detection Yes, a perfect forecast would have value 1) drops rapidly for all the experiments except for the ‘CTRARD’. Although the false alarm rate is obviously higher than ‘VEL’, the computed CSI score is approaching the ‘VEL’. Experiment ‘CTRFER’ which uses the Ferrier option to retrieve hydrometer fields and employs the Ferrier microphysical scheme in the model forecast performs slightly better than ‘CTR00’ when higher threshold was applied. In all, when lower threshold was used, the experiments with reflectivity assimilated, got relatively lower scores. Experiment without any data assimilation, performs better than the form. Experiment with radial winds assimilated, perform best in this test. When higher threshold was employed, experiments ‘CTRRAD’ with better heavy rain center location forecast and less false alarm rates, is ranked second among all the experiments. The ‘VEL’ performs best based on the CSI scores. Erin’s asymmetric characteristic is reflected by the observed rain structure. A small eye like feature can be spot in the six hour accumulated rainfall map between 1200 UTC to 1800 UTC (see the arrow point in the Fig. 8 (a)). The precipitation region is located southeast part of Erin. Among all the experiments, although the predicted eye is wider in size and located southeast to the observation, ‘CTRRAD’ is the only one experiment simulated the eye like feature. In addition, ‘CTRRAD’ successfully predicted two extreme value centers with slightly angle errors. When lower threshold was adopted, similar to the verification results between 0600 to 1200 UTC, the ‘VEL’ which have lowest FAR value, got the highest CSI scores. Unlike the big difference between ‘CTR00’ and ‘CTRRAD’ in Fig. 7, the CSI scores are closer for these two experiments. The evidence of radial winds improve the precipitation structure forecast could also be found during this period. The ‘VEL’ successfully predicted the two heavy rain centers but with narrow band in the east-west direction which may due to the slow movement of the simulated precipitation system (see the track analyzed results above). Without the help of radial winds, the predicted system of ‘REF’ is loose and one of the extreme centers even entered the TEXAS which is southern of Oklahoma. When high threshold was employed, the ‘CTRRAD’ got the highest CSI score. The ‘VEL’ perform slightly better than ‘CTRFER’. We further look into the hourly verification scores of CSI to see the performance of different experiments and also the sensitivity of CSI score to the neighborhood width. The threshold used in the hourly verification is lower than the six hour accumulated rainfall. As expected, when lower threshold 1.25mm employed, the CSI score curve line of experiment ‘VEL’ is above all other experiments except the last two hours forecast. This may due to the rapid dissipation of the predicted system in ‘VEL’. The improvement of radial winds to the forecast is significantly when compared without any data assimilation. Experiments ‘REF’ and ‘CTRRAD’ with reflectivity data assimilated have the same behaviors in the first few hours forecast. However, with the increase of display errors and the fade of impact from reflectivity, the CSI scores of ‘REF’ decreased while the verification scores of ‘CTRRAD’ is stable and even goes up slightly. Although the experiment ‘CTR00’ almost failed to predict the structure of Erin, with relatively clean forecast, is perform better than ‘CTRRAD’ in most of the time. The increase of neighborhood width is helpful if the forecast system is mis-displaced within the range of influence radius or if the forecasted system matches the observation with extension in boundary. For the lower threshold 1.25mm, the increase of neighborhood width up to 25 grid points in this set of tests increase the CSI value for all the experiments. Between 0600UTC to 0900 UTC, the increment of experiments with reflectivity assimilated is larger than without reflectivity data. This may indicated the forecast system is larger than the observation. The extension of neighborhood width reduces the size error in some aspects. Among all the experiments, the CTRRAD is most sensitivity to the neighborhood width with the average increment 0.0672 in CSI value. The rest are 0.0274, 0.0434, 0.0499 and 0.0622 for ‘CTR00’, ‘REF’, ‘VEL’ and ‘CTRFER’ respectively. The ‘CTR00’ with largest displacement error, are not sensitivity to the neighborhood width. When higher threshold 15mm was employed, the CSI value drops rapidly. On the contrary, the increase of neighborhood width decreases the CSI value in most of the time. In the test, we take ‘conv_thresh=0.5’, which means the computational of ‘Yes’ of each point requires at least half of 25x25 surrounding grid points larger than 15mm. With higher threshold, the isolated object is small in size. When the system have no more than half of 25x25 grid points in space, there are no ‘Hits’ point. The CSI would have the value of 0. And this explain why when the neighborhood width extended, the CSI value are 0 after 1500 UTC for all the cases. Therefore, in order to get reasonable scores using the neighborhood verification method, the neighborhood width needs to be specified properly. Not only the distances, but also the area of the forecast and observed system for a given threshold should be considered. c. Applied the Objected-based method to the precipitation verification The neighborhood verification method is meaningful when the forecasts are similar to each other but with deviation in intensity or position. However, it cannot distinguish the shape difference between different forecasts. The CSI scores calculated from the neighborhood method shows the ‘CTR00’ is better than ‘CTRRAD’ in most of the time even when larger threshold was applied. The main reason for that is higher false alarm rate for the ‘CTRRAD’. Clearly, the ‘CTRRAD’ have better structure forecast through a side-to-side comparison between the observed and forecasted reflectivity (see Fig. 5). Well predicted eye like features are essential for a successful forecast in this tropical storm Erin case. To better describe the outline of the forecasts and distinguish the structure difference among the experiments, the object-based verification approach was introduced. The total interest calculated from varies resolved and matched object properties were used to illustrate the similarity between forecast and observation. The approach for resolving the rain system objects are described more detail in (Davis et al. 2006a; Davis et al. 2006b). Simple introduction are presented here. There are general two steps: convolution and thresholding. The raw data were first convoluted using a simple filter function followed by the thresholding process. After the objects were identified, the original rainfall values were restored to the isolated objects. Fig. 10 shows an example of the MODE resolved objects of experiment ‘CTRRAD’ and Stage IV precipitation valid at 1100 UTC. There are total 9 isolated objects for the forecast and 1 for the observation. Blue color in the forecast column means the object does not match any objects in the observation column. And the red color is the matched objects. Two objects in the forecast column were merged together and the convex hull enclose the objects was plotted. The forecast have similar outline as the observation with a slight position deflection (see the column of the forecast with observation outline and observation with forecast outline). But the forecast yields more fake rain region than the observation. Fig. 11 plots some properties of MODE resolved objects. The raw data threshold is taken as 10mm and the convolution threshold is 15mm. Therefore, the light rain area is not considered in this paragraph. The curvature adopted here is the radius of curvature of the object defined in terms of third order moments. The observation has larger value of curvature than the forecast. Since the observed system have bending rain band, the closer indicates the better of curved structure forecast. Among all the experiments, the computed curvature of ‘CTRRAD’ is closest to the observation which illustrate the ‘CTRRAD’ have best rain band structure forecast. During 0600 UTC to 1500 UTC, as seen from the Fig. 5, almost all the experiments except ‘CTRFER’ have overestimated the precipitation area. These features are enlarged especially when the reflectivity data are assimilated. After 1500 UTC, the ‘VEL’ due to the dissipation of the forecast system, the resolved objects is smaller than the observation. The 90th percentiles intensity is defined as 9% of the object values are above that while 90% are below. This could represent the intensity of the extreme rainfall center in this case. The ‘CTR00’ and ‘VEL’ have larger 90th percentiles value than the observation while the curves of ‘REF’ and ‘CTRRAD’ lie slightly below. The ‘CTRFER’ underestimates the intensity of the storm. This could also help to explain the extreme heavy rain center in Fig. 7 and Fig. 8. The ‘CTR00’ and ‘VEL’ have wider dark red area than the observation while the colors for the rest experiments are lighter. The intensity and track prediction plays an important role in the tropical storm forecast. The location of the precipitation area is another key aspect for a successful forecast especially for the inland flooding case. The connection among centroids of the resolved and matched objects by the MODE tools could be served as the storm moving path for this particular purpose. The total interest T ( ) depicted in the Fig. 12 are calculated from the formula below, more details see the MET’s manual (DTC 2009). w C ( ) I ( ) T ( ) w C ( ) i i i i i i i i Where is the vector of vary object attributes (1 , 2 , 3 ,..., n ) . Ci is the confidence map range from 0~1 and is a function of the entire attribute vector (1 , 2 , 3 ,..., n ) . wi is the weight assigned to each attribute. At 0600 UTC, the center of precipitation area for each experiment was located southeast to the observation (see Fig. 12 (a)). It differs with the track in Fig. 6 (b). When the predicted central of Erin is northeast to the observation for the ‘VEL’ and ‘CTR00’, the precipitation region for these two experiments are located in the southwest-south part of the system. These lead to the forecasted precipitation centers south to observation. For the lower threshold, ‘CTRRAD’ starts with larger displacements error 85.7km and ends with 66.7km. And it reaches the minimum displacement errors 35.3km at 1500 UTC when the predicted move across the observed path. This error was only 5km bigger than the lowest position error which is also obtained at that time. The ‘VEL’ with relative clean forecast, have the lowest distance error 48.9km on average. As the analyzed results of neighborhood, the total interest curve for ‘VEL’ lies over all other experiments for most of the time (see Fig. 12 (b)). The performance of ‘CTRRAD’ and ‘REF’ is similar to each other at the first beginning. As the impact from the reflectivity faded, the ‘CTRRAD’ performs better than ‘REF’. The ‘REF’ due to the largest displacement error, has lowest interest value on average. Heavy rain location is extremely important for the inland flooding prediction. To satisfy that purpose, we upgraded the raw data threshold from 0mmm to 10mm. The upgrade of threshold significantly reduced the distance error for the ‘CTRRAD’ which indicates the accurate prediction of heavy rain center. The average displacement error is no more than 50km with lowest distance error measured 22.7km at 1500 UTC. It can be seen from the Fig. 12 (c) that the curve line of ‘CTRRAD’ is below all of other experiments. For the ‘VEL’ and ‘CTR00’, however, the increase of threshold enlarges the displacement error. The change for the centriod ‘REF’ is obvious with distance errors from matched observation reduced over 10km on average. Fig. 12 (d) depicts the total interest of all the experiments against NCEP stage IV. The ‘CTRRAD’ gets the highest interest value which indicates the forecast system has best similarity as the observation. Before 1500 UTC, experiment ‘VEL’ is slightly below the ‘CTRRAD’. The rapid growth of displacement error between 1500 UTC to 1800 UTC causes the total interest value declined rapidly. The ‘CTRFER’ is ranked third on average. For most of the time, ‘REF’ lies above ‘CTR00’. 5. Summary In this paper, the inland reintensification tropical storm Erin was chosen to examine the performance of multiple-Doppler radar in the GSI data assimilation system. Data from four Doppler radar located within the Oklahoma state were first qualified and then superobed to the model resolution. All the experiments with radar data assimilation were initialized from 0000 UTC Aug 19 2007 using NAM as background. The assimilation cycle were lasted of two hours long with intermittent assimilation interval of 10 minutes. Two key parameters: the horizontal de-correlation scale factor for radial wind and the option for retrieving the hydrometeor field of mixing ratio of rain, snow and hail from the reflectivity data were tested and analyzed. The analyzed result for the radial winds suggest influence radius with approximate 3~4 grids are much better than with more than 20 grids or larger. Instead of yielding large increment near the observation point, the larger horizontal de-correlation scale factor spreads the innovations to wider area and over-smoothes the small scale information. The smaller horizontal de-correlation scale factor, however, helps to reserve the storm scale information. This conclusion was further proved by the forecast results. With 3~4 grids influence radius, the experiment ‘CTRRAD’ was able to depict the eye like features while the experiment ‘CTRRAD10’ with 10 times than the smaller configuration failed to predicted this key characteristic. The comparison between different retrieve method demonstrate the Thompson have largest amount of retrieved fields of rain, snow and hail. The KRY option retrieved rain and hail are larger than the Ferrier method. The retrieved snow from Ferrier is higher than KRY only when the observed reflectivity is over 40dbz. The Thompson and Ferrier option were further examined through intermittent data assimilation. The Thompson approach performs much better than Ferrier in this tropical storm case. We also examine the impact of different part of radar data for the short range precipitation forecast. With local wind circulation information included by the multiple radars, the assimilation of radar radial wind enhances the convergence and divergence in the storm developing area and further improves the model storm scale circulation to a certain extent. This feature could be reflected by the side-to-side comparison of forecasted 3km height reflectivity between the experiments with and without radar radial winds assimilation. With the radar radial winds assimilated, the experiment ‘VEL’ was able to delineate the bending structure much better than the ‘CTR00’. On the other hand, the assimilation of reflectivity, since it introduced the rain, snow and hail field to the model environment, reduces the spin up time for the precipitation formation process and further improves the heavy rain center forecast. The six hour accumulated rainfall from 0600 UTC to 1200 UTC (4 to 10 hours forecast) suggests that the assimilation of reflectivity data corrects the heavy rain center to the north. The assimilation of both radar radial wind and reflectivity has best performance. Not only does it have the lowest track errors on average, but also does it successfully predict the eye like features. In addition, the six hour accumulated rainfall from 0600 UTC to 1200 UTC demonstrates the ‘CTRRAD’ have the best location of heavy rain region. Ignoring the phase error, the predicted outline of six hour accumulated rainfall of ‘CTRRAD’ is most similar among all the experiments when compared with the observation during the 1200 UTC to 1800 UTC. The ‘CTRRAD’ is the only experiment that delineates the eye like feature during that time period. The NCEP Stage IV data was used as the observation. And the neighborhood verification method together with the object-oriented approach within the MET was used to verify the impact of different part of radar data in the short range quantitative precipitation forecast. The verification score of CSI computed from the neighborhood method shows the assimilation of radar radial wind (VEL) significantly improves the forecast skill. The assimilation of reflectivity data, however, performs worse than the ‘CTR00’. That result could be acceptable to a certain degree since the assimilation of reflectivity data only introduced too much fake rain outside the main precipitation body. Although the assimilation of both type of radar data (CTRRAD) shows the best structure and lowest track errors and so on, the CSI score for the lower threshold shows the ‘CTRRAD’ perform slightly better than the ‘REF’ but worse than the ‘CTR00’. During 0600 UTC to 1200 UTC, when higher threshold were adopted, the CSI scores of six hour accumulated rainfall for the ‘CTRRAD’ are higher than the ‘CTR00’ as expected but lower than ‘VEL’. The CSI scores for the same threshold suggest the ‘CTRRAD’ are slightly better than ‘VEL’ between 1200 UTC to 1800 UTC. The hourly verification CSI scores suggest the ‘CTR00’ have better forecast skills than the ‘CTRRAD’ even when the higher threshold was applied. The neighborhood verification method which verifying each point within a range can reduce the impact of displacement error to the verification scores a bit. Since it does not consider the shape difference between two verifying objects, it shows the experiment with clean system but with worse structure are better than the experiment with better structure forecast. To better understanding the verification method and describing good or bad forecast among experiments with obvious structure difference, the object-based verification approach was employed in this study. Several object properties including the curvature, area and 90th percentiles intensity were calculated from the resolved objects. The curvature suggests the ‘CTRRAD’ were successful in the rain band bending structure forecast. The intensity helps to explain the extreme heavy rain center of experiments ‘VEL’ and ‘CTR00’. The storm moving path depicted from the centriod of the resolved objects could be used as the track for the storm precipitation area. This could be useful especially for the identification of heavy rain center of the inland flooding case. The storm moving path indicates the ‘CTRRAD’ have the best precipitation location forecast for the heavy rain area. The average distance error is no more than 50km and the lowest value is 22.7km. The total interest computed from the different attributes of the resolved and matched objects can represent the similarity between the forecast and observation. The total interest calculated in this case suggests that the ‘CTRRAD’ is obviously better than ‘VEL’ and ‘CTR00’. The ‘CTRRAD’ have the best structure forecast based on this investigation. Acknowledgments. This work was primarily supported by DOT-FAA grant NA17RJ1227 through NOAA. M. Xue was also supported by NSF grants….. Reference Arndt, D. S., J. B. Basara, R. A. McPherson, B. G. Illston, G. D. McManus, and D. B. Demko, 2009: Observations of the Overland Reintensification of Tropical Storm Erin (2007). Bulletin of the American Meteorological Society, 90, 1079-1093. Brown, B. G., J. H. Gotway, R. Bullock, E. Gilleland, and D. Ahijevych, 2009: The Model Evaluation Tools (MET): Community tools for forecast evaluation. 25th Conf. Int. Interactive Information and Processing Systems (IIPS) for Meteorology, Oceanography, and Hydrology, Paper 9A.6. Davis, C., B. Brown, and R. Bullock, 2006a: Object-based verification of precipitation forecasts. Part I: Methodology and application to mesoscale rain areas. Mon. Wea. Rev., 134, 1772-1784. Davis, C., B. Brown, and R. Bullock, 2006b: Object-Based Verification of Precipitation Forecasts. Part II: Application to Convective Rain Systems. Monthly Weather Review, 134, 1785-1795. DTC, 2009: Model Evaluation Tools Version 2.0 (METv2.0) User's Guide. Ebert, E. E., 2008: Fuzzy verification of high-resolution gridded forecasts: A review and proposed framework. Meteorological Applications, 15, 51-64. Eilts, M. D. and S. D. Smith, 1990: Efficient Dealiasing of Doppler Velocities Using Local Environment Constraints. Journal of Atmospheric and Oceanic Technology, 7, 118-128. Ferrier, B. S., 1994: A double-moment multiple-phase four-class bulk ice scheme. Part I: Description. J. Atmos. Sci., 51, 249-280. Ferrier, B. S., W.-K. Tao, and J. Simpson, 1995: A double-moment multiple-phase fourclass bulk ice scheme. Part II: Simulations of convective storms in different large-scale environments and comparisons with other bulk parameterizations. J. Atmos. Sci., 52, 1001-1033. Hu, M. and M. Xue, 2007: Implementation and evaluation of cloud analysis with WSR88D reflectivity data for GSI and WRF-ARW. Geophysical Research Letters, 34, L07808, doi:10.1029/2006GL028847. Hu, M., M. Xue, and K. Brewster, 2006a: 3DVAR and cloud analysis with WSR-88D level-II data for the prediction of Fort Worth tornadic thunderstorms. Part I: Cloud analysis and its impact. Mon. Wea. Rev., 134, 675-698. Hu, M., M. Xue, J. Gao, and K. Brewster, 2006b: 3DVAR and cloud analysis with WSR88D level-II data for the prediction of Fort Worth tornadic thunderstorms. Part II: Impact of radial velocity analysis via 3DVAR. Mon. Wea. Rev., 134, 699-721. Kessler, E. I., 1969: On the distribution and continuity of water substance in atmospheric circulations. Meteor. Monogr. No. 32, Amer. Meteor. Soc., 84 pp. Rogers, R. R. and M. K. Yau, 1989: A Short Course in Cloud Physics. 3rd ed. Pergamon Press, 293 pp. Thompson, G., R. M. Rasmussen, and K. Manning, 2004: Explicit forecasts of winter precipitation using an improved bulk microphysics scheme. Part I: Description and sensitivity analysis. Monthly Weather Review, 132, 519-542. Xue, M., K. K. Droegemeier, and V. Wong, 2000: The Advanced Regional Prediction System (ARPS) - A multiscale nonhydrostatic atmospheric simulation and prediction tool. Part I: Model dynamics and verification. Meteor. Atmos. Physics, 75, 161-193. Xue, M., D.-H. Wang, J.-D. Gao, K. Brewster, and K. K. Droegemeier, 2003: The Advanced Regional Prediction System (ARPS), storm-scale numerical weather prediction and data assimilation. Meteor. Atmos. Physics, 82, 139-170. Xue, M., K. K. Droegemeier, V. Wong, A. Shapiro, K. Brewster, F. Carr, D. Weber, Y. Liu, and D.-H. Wang, 2001: The Advanced Regional Prediction System (ARPS) - A multiscale nonhydrostatic atmospheric simulation and prediction tool. Part II: Model physics and applications. Meteor. Atmos. Phy., 76, 143-165. Zhang, J., 1999: Moisture and Diabatic Initialization Based on Radar and Satellite Observation, School of Meteorology, University of Oklahoma, 194. Zhao, K. and M. Xue, 2009: Assimilation of coastal Doppler radar data with the ARPS 3DVAR and cloud analysis for the prediction of Hurricane Ike (2008). Geophy. Res. Lett., doi:10.1029/2009GL038658. List of figures Fig. 1 (a) Best track of Erin when moving across the Oklahoma state, Oklahoma mesonet sites distribution and four Doppler Radars location in Oklahoma. (b) The minimum sea level pressure and (c) the average sea level pressure of all the mesonet sites. Fig. 2 (a) single-point experiment with the observation of x-component increment of 5 m/s introduced at 700 hPa. (horizontal de-correlation scale) hzscl=0.006,0.012,0.024. (c) and (e) the same as (a) but with hzscl=0.06,0.12,0.24 and hzscl= 0.373,0.746,1.5 respectively. Real time four Doppler Radars data analysis at 06 UTC 19 Aug, 2007 (b), (d) and (f) using the same hzscl as (a), (c), (e) respectively. Fig. 3 (a) Observed radar velocity at elevation 0.38o (b) NAM background emulated to the radar coordinate (c) the analyzed wind fields using the configuration of Fig.2 (a) and emulated to the radar coordinate as (b). (d) and (e) the same as (c) but using the configuration of Fig. 2 (c) and (e) respectively. Fig. 4 different reflectivity factor equations based on Thompson (red), Ferrier (blue) and KRY (green) microphysical schemes for retrieving mixing ratio of (a) rain (g/kg), (b) hail (g/kg)and (c) dry snow (g/kg) (d) wet snow (g/kg). Note: the temperature used for the equation of dry snow in this plot is -5 oC. Fig. 5 3km-height NSSL radar mosaic reflectivity (first row) from 0600 UTC to 1800 UTC with 3 hours interval (the same below), forecasted reflectivity without data assimilation (second row), with radar radial winds assimilated (third row), with radar reflectivity assimilated (fourth row), with both radar radial and reflectivity data assimilated (fifth row), with both types data assimilated but using the horizontal decorrelation of Fig. 2 (c) (sixth row), with both types data assimilated but using the Ferrier option to retrieve the hydrometeor fields (last row). Fig. 6 (a) National Hurricane Center (NHC) observed and model predicted minimum mean sea level pressure of Erin. Notice the mean sea level observation at 1200 UTC are doubted, details will be explained in the paper. (b) NHC best track data and predicted tracks of Erin. The inner small box in the up-right corner of (b) plots the track errors (km). The best track was plotted at 6 hours interval with the starting point at 0000 UTC and the predicted track was plotted every 3 hours started from 0600 UTC. Both were ended at 1800 UTC Aug 2007. Fig. 7 six hour accumulated rainfall between 0600 UTC to 1200 UTC for (a) NCEP Stage IV 4km grid precipitation data (b)CTR00 (c) REF (d) VEL (e) CTRARD (f) CTRFER. (g) FAR, PODY, CSI scores against NCEP Stage IV precipitation data with threshold 5mm (h) with 50mm Fig. 8 The same as Fig.7 except (h) uses threshold 25mm. And the time period is from 1200 UTC to 1800 UTC. Fig. 9 Hourly CSI scores against the NCEP Stage IV precipitation. (a) Threshold >= 1.25mm and with 5x5 grid points surrounding each point; (c) Threshold >= 1.25mm and 25x25 grid points; (e) (c) minus (a); (b) Threshold >= 15mm and 5x5 grid points; (d) Threshold >= 15mm and 25x25 grid points. The convolution threshold is 0.5 for the neighborhood method. Fig. 9 Hourly CSI scores against the NCEP Stage IV precipitation. (a) Threshold >= 1.25mm and with 5x5 grid points surrounding each point; (c) Threshold >= 1.25mm and 25x25 grid points; (e) (c) minus (a); (b) Threshold >= 15mm and 5x5 grid points; (d) Threshold >= 15mm and 25x25 grid points. The convolution threshold is 0.5 for the neighborhood method. Fig. 11 MODE resolved objects prosperities (a) curvature (b) rain area and (c) 90 percentiles intensity of forecast and observation. Raw threshold is taken as 0mm and the convolution threshold is 5mm. Fig. 12 (a) The storm moving path based on the resolved objects and the small box in the upright corner is the distance between two matched objects. (b) The interest between the combined objects of forecast and observation. Raw threshold is taken as 0mm and the convolution threshold is 5mm. (c) and (d) as (a) and (b) but use 10mm and 15mm respectively. List of tables Tabel. 1 lists of all the experiments Tabel. 2 statistic results of emulated radial wind verse observed radial wind Tabel. 3 lists of reflectivity factor equations based on the different microphysical schemes. a b c Fig. 1 (a) Best track of Erin when moving across the Oklahoma state, Oklahoma mesonet sites distribution and four Doppler Radars location in Oklahoma. (b) The minimum sea level pressure and (c) the average sea level pressure of all the mesonet sites. a b c d e f Fig. 2 (a) single-point experiment with the observation of x-component increment of 5 m/s introduced at 700 hPa. (horizontal de-correlation scale) hzscl=0.006,0.012,0.024. (c) and (e) the same as (a) but with hzscl=0.06,0.12,0.24 and hzscl= 0.373,0.746,1.5 respectively. Real time four Doppler Radars data analysis at 06 UTC 19 Aug, 2007 (b), (d) and (f) using the same hzscl as (a), (c), (e) respectively. a b c d e Fig. 3 (a) Observed radar velocity at elevation 0.38o (b) NAM background emulated to the radar coordinate (c) the analyzed wind fields using the configuration of Fig.2 (a) and emulated to the radar coordinate as (b). (d) and (e) the same as (c) but using the configuration of Fig. 2 (c) and (e) respectively. a c b d Fig. 4 different reflectivity factor equations based on Thompson (red), Ferrier (blue) and KRY (green) microphysical schemes for retrieving mixing ratio of (a) rain (g/kg), (b) hail (g/kg)and (c) dry snow (g/kg) (d) wet snow (g/kg). Note: the temperature used for the equation of dry snow in this plot is -5 oC. Fig. 5 3km-height NSSL radar mosaic reflectivity (first row) from 0600 UTC to 1800 UTC with 3 hours interval (the same below), forecasted reflectivity without data assimilation (second row), with radar radial winds assimilated (third row), with radar reflectivity assimilated (fourth row), with both radar radial and reflectivity data assimilated (fifth row), with both types data assimilated but using the horizontal decorrelation of Fig. 2 (c) (sixth row), with both types data assimilated but using the Ferrier option to retrieve the hydrometeor fields (last row). a ? b Fig. 6 (a) National Hurricane Center (NHC) observed and model predicted minimum mean sea level pressure of Erin. Notice the mean sea level observation at 1200 UTC are doubted, details will be explained in the paper. (b) NHC best track data and predicted tracks of Erin. The inner small box in the up-right corner of (b) plots the track errors (km). The best track was plotted at 6 hours interval with the starting point at 0000 UTC and the predicted track was plotted every 3 hours started from 0600 UTC. Both were ended at 1800 UTC Aug 2007. a b c d e f g h Fig. 7 six hour accumulated rainfall between 0600 UTC to 1200 UTC for (a) NCEP Stage IV 4km grid precipitation data (b)CTR00 (c) REF (d) VEL (e) CTRARD (f) CTRFER. (g) FAR, PODY, CSI scores against NCEP Stage IV precipitation data with threshold 5mm (h) with 50mm a b c d e f g h Fig. 8 The same as Fig.7 except (h) uses threshold 25mm. And the time period is from 1200 UTC to 1800 UTC. a b c d e Fig. 9 Hourly CSI scores against the NCEP Stage IV precipitation. (a) Threshold >= 1.25mm and with 5x5 grid points surrounding each point; (c) Threshold >= 1.25mm and 25x25 grid points; (e) (c) minus (a); (b) Threshold >= 15mm and 5x5 grid points; (d) Threshold >= 15mm and 25x25 grid points. The convolution threshold is 0.5 for the neighborhood method. Fig. 10 Example of MODE isolated objects of CTRRAD and Stage IV within the MET software valid at 1100 UTC Aug 2007. a b c Fig. 11 MODE resolved objects prosperities (a) curvature (b) rain area and (c) 90 percentiles intensity of forecast and observation. Raw threshold is taken as 0mm and the convolution threshold is 5mm. a b c d Fig. 12 (a) The storm moving path based on the resolved objects and the small box in the upright corner is the distance between two matched objects. (b) The interest between the combined objects of forecast and observation. Raw threshold is taken as 0mm and the convolution threshold is 5mm. (c) and (d) as (a) and (b) but use 10mm and 15mm respectively. Tabel. 1 lists of all the experiments name Observation CTR00 CTRRAD CTRRAD10 CTRFER VEL REF No VEL+REF VEL+REF VEL+REF VEL REF Microphysical scheme Thompson Thompson Thompson Ferrier Thompson Thompson Horizontal decorrelation scale 0.006,0.012,0.024 0.06,0.12,0.24 0.006,0.012,0.024 0.006,0.012,0.024 Tabel. 2 statistic results of emulated radial wind verse observed radial wind background nam namgsi namgsi10 namgsi60 hzscl rmse 3.9589 0.006,0.012,0.024 3.6388 0.06,0.12,0.24 3.7411 0.373,0.746,0.15 5.4021 rmsenam 0.0 1.7403 2.2987 2.8445 Absolute bias 2.9374 2.7596 2.8590 4.0147 R 0.9759 0.9786 0.9752 0.9491 Tabel. 3 lists of reflectivity factor equations based on the different microphysical schemes. Thompson scheme Zr Zs Zh Ferrier scheme 1018 720 ( qr )1.75 1.75 NOr 0.75 r1.75 1018 720 0.224 s 0.25 ( qs )1.75 1.75 NOs 0.75 r 2 2.4423 1018 720 0.224 ( qh ) 2.4423 1.57 0.75/ 0.52 r 2 h 0.4423 Zr KRY scheme Z r a( 1000 qr )b 1018 720 1.75 qr 1.75 0.75 1.75 NOr r 1018 720 K 2 s 0.25 1.75 ice qs ,tc 0 oC 2 1.75 K water NOs 0.75 i 2 Zs 1018 720 1.75 qs ,0 oC tc 5 oC 1.75 0.75 1.75 NOs s 1018 720 Z h 1.75 0.75 1.75 NOh h 0.95 qh 1.6625 Z s c( 1000 qs ) d Z h c( 1000 qh )d where where 0.0002 qr 1 9 1 (10 2 107 ) tanh( ) (109 2 107 ) 2 0.0001 2 o min 2.0E8, 2.0E6 exp 0.12 t c , t c 0 C NOs o 2.0E6, t c 0 C NOr 8.0E+06,NOs 3.0E+06,NOh 4.0E+04 a 17300.0; b 1.75 K ice 0.176, K c 38000.0; d 2.2 NOr 2 Where 2 water 0.93 r 1000, s 100, i 917, h 913 r 1000, s 100, h 400 Note: the units of mixing ratio of rain qr , snow qs and hail qh is kg/kg