Simulated Annealing and the Boltzmann Machine
Simulated annealing
Annealing is a process used in metallurgy for tempering certain alloys of metals by
heating them to a high temperature. The molten metal is then cooled gradually to bring
the temperature down to room temperature.
Simulated annealing refers to the annealing process done on a computer by simulation.
In this model, a parameter T, equivalent to temperature in annealing, is reduced slowly.
In the context of ANN learning, it is a technique used for reducing the possibility of the
net falling into a local minimum during the training of a neural network and assist the
finding of the global minimum.
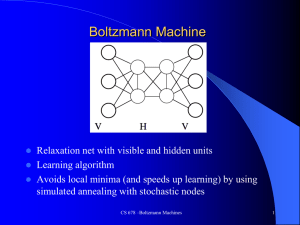
The particular ANN paradigm, for which simulated annealing is used for finding the
weights, is known as a Boltzmann neural network, also known as the Boltzmann
machine (BM). The BM, proposed by (Ackley et al., 1985), is a variant of the Hopfield
net with a probabilistic, rather than deterministic, weight update rule.
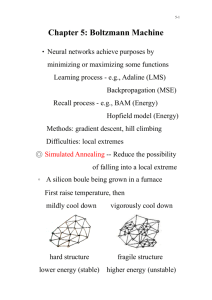
Imagine a marble rolling around in a landscape, which represents the weight or energy
space. The avoidance of a local minimum A and finding the global minimum B (say)
may be accomplished by at first vigorously shaking the landscape to enable the marble
to climb out of a local minimum across an energy barrier. To help the marble escape
local minima, and at the same time increase its chances of remaining in the global
minimum, the shaking is done less and less vigorously, which is analogous to starting
with a high value of T and reducing it gradually. Here T represents the “vigour” of
shaking.
The Boltzmann model
In terms of architecture, the BM consists of input, output, and intermediate or hidden
nodes. All weights are symmetric weights where
wij
=
wji, for ij.
Outputs
Inputs
Thus Boltzmann networks are highly recurrent, and this recurrence eliminates any basic
difference between input and output nodes, which may be considered as either inputs or
outputs as convenient.
Node outputs in a BM take on discrete {1,0} values. Outputs are computed
probabilistically, and depend upon the temperature variable T. Activation, Si, of node i is
given by
n
Si
=
w u
j 0
ij
j
The new value of the node’s output ui is given by
ui
=
1 with probabilit y pi
0 with probabilit y 1 pi
(1)
where,
1
(2)
1 e Si / T
The new value of ui will be either 1 or 0 with equal probability 0.5 if either Si = 0 or T is
very large. On the other hand, if T is very small, the new activation is computed
deterministically, and the node behaves like a familiar discrete {1,0} cell.
pi
=
Input and output nodes can be either clamped or free-running. If they are clamped, then
their outputs, ui, are fixed and do not change. If they are free-running, then their outputs
change according to the equation for ui above. Intermediate nodes are always freerunning.
The BM begins with a high temperature T and follows a simulated annealing schedule
where T is gradually reduced as iterations proceed. At each iteration, we select a node ui
at random and, if it is not clamped, compute ui’s new output. When T becomes
sufficiently small, the net becomes deterministic like a Hopfield net and reaches
equilibrium. At this stage, no further output changes occur, and the node outputs are
read off.
The energy of the BM is computed using the same formula used in Hopfield nets:
E(t)
=
- ui (t )u j (t ) wij
i j
With T = 0 or close to 0, in Eq.(2) above, the net behaves as a Hopfield net, and its
energy either decreases (for a change in ui from 1 to 0), or remains unchanged (for a
change in ui from 0 to 1). Hence the system must stabilise by moving into a minimum
energy state if T = 0. To ensure that a global minimum will be reached with a high
probability, simulated annealing can be performed by lowering T gradually.
The network can settle into one of a large number of energy states, the distribution of
which is given by the Boltzmann distribution function
p = ke-E/T
Where p is the probability of the net finding itself in a state with energy E.
If P is the probability of a state with energy E , then
P /P = ( e-E/T)/( e-E/T)
= e-(E-E)/T
If E is a lower energy state than E then
therefore
e-(E-E)/T > 1
P /P
> 1,
so P > P
which means as the network approaches thermal equilibrium, lower energy states are
more probable, dependent only upon their relative energy.
Higher temperatures allow local minima states to be escaped via higher energy states,
but also allow transitions from lower to higher minima with almost equal probability. As
the temperature is lowered, however, the probability of escaping from a higher minima
to a lower one falls, but the probability of travelling in the opposite direction falls even
faster, and so more low energy states are reached. Eventually, the system settles down at
low temperature in thermal equilibrium.
Learning in Boltzmann Machines
The network is arbitrarily divided into input, output and hidden units.
Learning occurs in two phases.
Phase 1:
Input and output units are clamped to their correct values, and the
temperature set to some arbitrary high value. The net is then allowed to cycle through its
states with the temperature being gradually lowered until the hidden units reach thermal
equilibrium. Weights between pairs of "on" units are incremented.
wij
=
wij
+
if ui = 1 and uj = 1
= k(pij – p’ij)
where pij is the average probability of the two neurons i and j being on when the
network is clamped, and p’ij is the probability of them being on when the
network is not clamped, and k is a scaling factor (Ackley et al., 1985).
Phase 2:
Only the input units are clamped to their correct values, with hidden and
output units left free. The net is run until thermal equilibrium is reached. Weights
between on units are decremented.
wij
=
wij
if ui = 1 and uj = 1
The first phase reinforces connections that lead from input to the output, while the
second "unlearns" poor associations.
Limitations of the Boltzmann machine
There are a number of problems associated with Boltzmann machines. Decisions about
how much to adjust the weights, how long you have to collect the statistics to calculate
the probabilities, how many weights you change at a time, how you adjust the
temperature during simulated annealing, and how to decide when the network has
reached thermal equilibrium. The main drawback however is that Boltzmann learning is
significantly slower than backpropagation.
References:
Beale & Jackson, Neural Computing, Adam Hilger 1990.
Ackley, D.H., Hinton, G.E. and Sejnowski, T.J. (1985) A learning algorithm for
Boltzmann machines, Cognitive Science, 9, 147-69.
 0
0