# MULTI-STATE SYSTEM AND THEIR RELIABILITY INDICES
advertisement

A New Approach to Solving Problems of Multi-state System
Reliability Optimization
GREGORY LEVITIN AND ANATOLY LISNIANSKI
The Israel Electric Corporation Ltd., Planning, Development & Technology Division
P.O.Box 10, Bait Amir, Haifa 31000, Israel
Tel. +972-48649860, Fax. +972-48649780
Email: levitin@iec.co.il
1
SUMMARY
Usually engineers try to achieve the required reliability level with minimal cost. The problem
of total investment cost minimization, subject to reliability constraints, is well known as the
reliability optimization problem.
When applied to multi-state systems (MSS), the system has many performance levels and
reliability is considered as a measure of the ability of the system to meet the demand (required
performance). In this case, the outage effect will be essentially different for units with different
performance rate. Therefore, the performance of system components, as well as the demand, should
be taken into account.
In this paper, we present a technique for solving a family of MSS reliability optimization
problems, such as structure optimization, optimal expansion, maintenance optimization and optimal
multistage modernization. This technique combines a universal generating function (UGF) method
used for fast reliability estimation of MSS and a genetic algorithm (GA) used as an optimization
engine. The UGF method provides the ability to estimate relatively quickly different MSS reliability
indices for series-parallel and bridge structures. It can be applied to MSS with different physical
nature of system performance measure. The GA is a robust, universal optimization tool that uses
only estimates of solution quality to determine the direction of search.
KEY WORDS: multi-state system; genetic algorithm; universal generating function; reliability
optimization
INTRODUCTION
Modern large-scale technical systems are distinguished by their structural complexity. Many of
them can perform their task at several different levels. In such cases, the system failure can lead to
decreased ability to perform the given task, but not to complete failure.
2
In addition, each system element can also perform its task with some different levels. For
example, the generating unit in power systems has its nominal generating capacity, which is fully
available if there are no failures. Some types of failures can cause complete unit outage while other
types of failures can cause a unit to work with reduced capacity. A system that can have different
task performance levels is named multi-state system (MSS).
The physical characteristics of the performance depend on physical nature of the system
outcome. Therefore, it is important to measure performance rates of system components by their
contribution into the entire MSS output performance. In the practical cases, one should deal with
various types of MSS corresponding to the physical nature of MSS performance. For example, in
some applications the performance measure is defined as productivity or capacity. Examples of
such MSS are continuous materials or energy transmission systems, power generation systems [1,2]
etc. The main task of these systems is to provide the desired throughput or transmission capacity for
continuous energy, material or information flow. The data processing speed can also be considered
as a performance measure [3,4] and the main task of system is to complete the task within the
desired time. Some other types of MSS were considered in [5].
Much work in the field of reliability analysis was devoted to the binary-state systems, where
only the complete failures are considered. The reliability analysis of MSS is much more complex.
The MSS was introduced in the middle of the 1970’s in [6-9]. In these works, the basic
concepts of MSS reliability were formulated; the system structure function was defined for coherent
MSS; and its properties were investigated. In [10], the coherence definition was generalized and
three types of coherence were studied. The reliability importance was extended to MSS in [10,11].
Concepts of MSS importance are also discussed in [12], where a decomposition theorem for MSS
structure functions is proven.
The steady-state behavior of multi-state monotone systems was considered by applying the
theory for stationary and synchronous processes with embedded point process in [13]. In [14], the
modeling technique was suggested which allows existing binary algorithms for block diagrams and
3
fault trees to be applied to multi-state system. The concept of equivalent behavior was introduced
in [15] to provide a comprehensive description of states and state transitions in the MSS and its
components. The analysis of multiple-valued logic tree is aimed at eliciting prime implicants.
These prime implicants are the multiple-valued logic analogue of minimal cut sets encountered in
binary fault trees. The prime implicants were also successfully used in dependability analysis of
software controlled systems [16]. In [17], a method for the two-sided estimation of MSS
unavailability was proposed. The method is based on the binary model, which can be assessed with
the usual tools. An asymptotic approach to the MSS reliability evaluation was presented in [18].
Practical methods of MSS reliability assessment are based on three different approaches [19]:
the structure function approach - where Boolean models are extended for the multi-valued case, the
stochastic process (mainly Markov) approach, and Monte-Carlo simulation. Obviously, the
stochastic process method can be applied only to relatively small MSS, because the number of
system states increases drastically with the increase in number of system components. The structure
function approach is also extremely time consuming. A Monte-Carlo simulation model may be a
fairly true representation of the real world, but the main disadvantage of the simulation technique is
the time and expense involved in the development and execution of the model [19]. This is an
especially important drawback when the optimization problems are solved. In spite of these
limitations, the above mentioned methods are often used by practitioners, for example in the field of
power systems reliability analysis [1,17].
In real-world problems of MSS reliability analysis, the great number of system states that need
to be evaluated makes it difficult to use traditional techniques in various optimization problems. On
the contrary, the universal generating function (UGF) technique is fast enough to be used in these
problems. In addition, this technique allows practitioners to find the entire MSS performance
distribution based on the performance distributions of its components. An engineer can find it by
using the same procedures for MSS with different physical nature of performance. In the following
sections the application of the UGF to MSS reliability analysis and optimization is considered.
4
To solve the wide range of reliability optimization problems, one has to choose an optimization
tool that is robust and universal and that imposes minimal requirements as to the knowledge of the
structure of the solution space. A genetic algorithm (GA) has all these properties and can be applied
for optimizing vectors of binary and real values as well as for combinatorial optimization. GAs have
been proven to be effective optimization tools in reliability engineering. The main areas of GA
implementation in this field are redundancy allocation and structure optimization subject to
reliability constraints [20-24], optimal design of reliable network topology [24-28], optimization of
reliability analysis procedures [30,31], fault diagnosis [32-34], and maintenance optimization [3539].
MSS RELIABILITY MEASURES
Consider a system consisting of n units. We suppose that any system unit i can have k i states:
from complete failure up to perfect functioning. The entire system has K different states as
determined by the states of its units. Denote a MSS state at instance t as Y(t) {1,2,..., K} , where
Y(t)=1 corresponds to the worst state and Y(t)=K corresponds to the best state. The performance
level Gj is associated with each state j {1,2,..., K} and Gi Gj if i>j. The MSS behavior is
characterized by its evolution in the space of states. To characterize numerically this evolution
process, one has to determine the MSS reliability indices. These indices can be considered as
extensions of the corresponding reliability indices for a binary-state system.
The MSS reliability measures were systematically studied in [19] and [40]. In this paper, we
consider three measures which are most commonly used by engineers, namely MSS availability,
MSS expected performance, and MSS expected unsupplied demand (lost throughput).
MSS availability A(t) is the probability that the MSS will be in the states with performance
level greater than or equal to W at a specified moment t>0, where the MSS initial state at the
instance t=0 is the best state K or some other predetermined state m (Gm>W). For large t the initial
5
state has practically no influence on the availability. Therefore, the index A is usually used for the
steady state case and is called the stationary availability coefficient, or simply, the MSS availability.
MSS availability is the function of required demand W. It may be defined as
A(W)
pk ,
Gk W
(1)
where pk is the steady state probability of MSS state k. The resulting sum is taken only for the states
where MSS performance is greater than or equal to the specified demand W.
In practice, the system operation period T is often partitioned into M intervals, Tm (1mM)
and each Tm has its own demand level Wm. The following generalization of the availability index
[3] is used in these cases:
EA
M
A(Wm ) q m ,.
(2)
m 1
where
M
q m Tm / Tm
(3)
m 1
is the steady state probability of demand level m.
For example, in power system reliability analysis, the index (1-EA) is often used and treated as
loss of load probability [1]. The MSS performance in this case is interpreted as power system
generating capacity.
The value of MSS expected performance could be determined as
K
EG= p k G k .
(4)
k 1
One can note that expected MSS performance does not depend on demand W. EG defines the
average productivity (capacity) or processing speed of the system.
When penalty expenses are proportional to the unsupplied demand, the expected unsupplied
demand EU may be used as a measure of system output performance. This index may be presented
by the following expression:
6
EU
M
K
p k q m max{W m G k ,0} ,
(5)
m 1 k 1
Examples of the EU measure are the unsupplied power in power distribution systems and
expected output tardiness in information processing systems.
In this case EU may be interpreted as expected electric power unsupplied to consumers. The
absolute value of this unsupplied demand is 5 MW.
In the following section we consider MSS reliability assessment based on MSS reliability
indices introduced above. The presented reliability assessment methods are based on the UGF
technique.
MSS RELIABILITY INDICES EVALUATION BASED ON THE UGF
The UGF was introduced in [41] and principles of its application were formulated in [42,43].
The most systematical description of mathematical aspects of the method can be found in [5,44],
where the method is referred to as generalized generating sequences approach. A brief overview of
the method with respect to its applications for MSS reliability assessment is presented in [3]. The
method was first applied to the real power system reliability assessment and optimization in [45,46].
For MSS which has a finite number of states, there can be K different levels of output
performance at each time t: G(t)G={Gk, 1kK} and the system output performance distribution
(OPD) can be defined by two finite vectors G and p={pk(t)}=Pr{G(t)=Gk} (1kK).
In our case, the UGF, represented by polynomial U(z) can define MSS OPD, i.e. it represents
all the possible states of the system (or element) by relating the probabilities of each state p k to
performance Gk of the MSS in that state in the following form:
K
U MSS (t , z)= p k ( t )z G k .
k=1
7
(6)
Having MSS OPD in the form (6), one can obtain the system availability for the arbitrary t and
W using the following operator A:
K
A( t , W ) A ( U MSS ( t , z), W ) A ( p k ( t )z
Gk
K
, W ) p k ( t )(G k W ),
k=1
(7)
k=1
where
1, x 0,
( x )
0, x 0.
(8)
A multi-state stationary (steady state) availability was introduced as Pr{G(t)W} after enough
time has passed for this probability to became constant. In the steady state, the distribution of state
probabilities is:
p k lim Pr{G (t) G k }, G(t) {G1, … , GK} .
t
The MSS stationary availability may be defined according to (1) when the demand is constant
or according to (2) in the case of variable demand. Thus, for the given MSS OPD represented by
polynomial UMSS(z), the MSS availability can be calculated as
EA
M
q m A (U MSS (z), Wm ) .
(9)
m1
The expected system output performance value during the operating time (Fig. 1) defined by
(3) can be obtained for given UMSS(z) using the following G operator:
K
E G G ( U MSS (z)) G ( p k z G k )
k 1
K
pkG k .
(10)
k 1
In order to obtain the expected unsupplied demand EU for the given UMSS(z) and constant
demand W according to (4), the following U operator should be used:
E U ( W)
M
q m U (U MSS (z), Wm ) ,
m1
where
8
(11)
K
E U ( Wm ) U ( U MSS (z), Wm ) U ( p k z G k , Wm )
k 1
K
p k max( Wm G k ,0).
(12)
k 1
Consider, for example, two power system generators with nominal capacity 100 MW as two
separate MSS [1]. In the first generator some types of failures require the capacity to be reduced to
60 MW and some types lead to the complete generator outage. In the second one some types of
failures require the capacity to be reduced to 80 MW, some types lead to capacity reduction to 40
MW and some types lead to the complete generator outage. So, there are three possible relative
capacity levels that characterize the performance of the first generator:
G11 =0.0, G12 =
60
100
=0.6, G13 =
= 1.0
100
100
and four relative capacity levels that characterize the performance of the second one:
G12 =0.0, G 22 =
40
80
100
=0.4, G 32 =
=0.8, G 24 =
= 1.0.
100
100
100
The corresponding steady state probabilities are the following:
p11 0.1, p12 0.6, p13 0.3
for the first generator and
p12 0.05, p 22 0.25, p 32 0.3, p 24 0.4
for the second one.
Now we can find the reliability indices for both MSS for W=0.5 (the required capacity level is
50 MW).
1.
The system u-functions according to (6) is as follows:
1
1
1
U1MSS (z) p11z G1 p12 z G 2 p13z G 3 0.1 0.6z 0.6 0.3z1.0 ,
2
2
2
2
U 2MSS (z) p12 z G1 p 22 z G 2 p 32 z G 3 p 24 z G 4 0.05 0.25z 0.4 0.3z 0.8 0.4z1.0 .
2.
The MSS stationary availability (7) is
A1MSS ( W) A1
MSS
(0.5)
pk
G1k W
9
= 0.6+0.3 = 0.9 ,
A 2MSS ( W) A 2
MSS
3.
(0.5)
pk
= 0.3+0.4 = 0.7 .
G 2k W
The expected MSS performance (10) is
E1G
3
p1k G1k
0.1* 0 0.6 * 0.6 0.3 *1.0 0.66 ,
k 1
which means 66% of the nominal generating capacity for the first generator and
2
EG
4
p 2k G 2k
0.05 * 0 0.25 * 0.4 0.3 * 0.8 0.4 *1.0 0.74,
k 1
which means 74% of the nominal generating capacity for the second one.
4.
The expected unsupplied demand (12) is
E1 (W)
U
E 2 ( W)
U
p k (W G k ) 0.1* (0.5 0.0) 0.05
W G k
p k (W G k ) 0.05 * (0.5 0.0) 0.25 * (0.5 0.4) 0.05.
WG k
In this case, EU may be interpreted as expected electric power unsupplied to consumers. The
absolute value of this unsupplied demand is 5 MW for both generators. Multiplying this index by
the considered system operating time, one can obtain the expected unsupplied energy.
Note that since the obtained reliability indices have different nature, they cannot be used
interchangeably. In the presented example, for instance, the first generator performs better than the
second one when availability is considered ( A1MSS (0.5) A 2MSS (0.5) ), the second generator
2
E1G ) and both
performs better than the first one when expected productivity is considered ( E G
generators have the same unsupplied demand ( E1U (0.5) E 2U (0.5) ).
DETERMINATION OF U-FUNCTION OF COMPLEX MSS USING COMPOSITION
OPERATORS
10
Real world MSS are often very complex and consist of a large number of elements connected
in different ways. To obtain the MSS OPD and the corresponding u-function, we must develop
some rules to determine the system u-function based on the individual u-function of its elements.
In order to obtain the u-function of a subsystem (component) containing a number of elements,
composition operators are introduced. These operators determine the subsystem u-function
expressed as polynomial U(z) for a group of elements using simple algebraic operations over
individual u-functions of elements. All the composition operators for two different elements take
the form
I
(u1 (z), u 2 (z)) [ p1i z
i 1
g1i
J
, p 2 jz
g2j
j1
I
J
] p1i p 2 jz
(g1i , g 2 j )
,
(13)
i 1 j1
where u1(z), u2(z) are individual U-function of elements and (.) is a function that is defined
according to the physical nature of the MSS performance and the interactions between MSS
elements. The function (.) in composition operators expresses the entire performance of a
subsystem consisting of different elements in terms of the individual performance of the elements.
The definition of the function (.) strictly depends on the type of connection between the elements
in the reliability diagram sense, i.e. on the topology of the subsystem structure. It also depends on
the physical nature of system performance measure.
For example in MSS, where performance measure is defined as capacity or productivity
(MSSc), the total capacity of a pair of elements connected in parallel is equal to the sum of the
capacities of elements. Therefore, the function (.) in composition operator takes the form:
(g1,g2)=g1+g2.
(14)
For a pair of elements connected in series the element with the least capacity becomes the
bottleneck of the system. In this case, the function (.) takes the form:
(g1,g2)=min(g1,g2).
(15)
In MSS where the performances of elements are characterized by their processing speed
(MSSs) and parallel elements cannot share their work, the task is assumed to be completed by the
11
group of parallel elements when it is completed by at least one of elements. The entire group
processing speed is defined by the maximum element processing speed:
(g1,g2)=max(g1,g2).
(16)
If a system contains two elements connected in series, the total processing time is equal to the
sum of processing times t1 and t2 of individual elements: T=t1+t2=g-11+g-12. Therefore,
the
total
processing speed of the system can be obtained as T-1=g1g2/(g1+g2) and the (.) function for a pair
of elements is defined as follows:
(g1,g2)=g1g2/(g1+g2).
(17)
operators were determined in [3,4] for several important types of series-parallel systems MSS.
Some additional composition operators were also derived for bridge structures [4,47].
Applying the operators in sequence, one can obtain the u-function representing the system
performance distribution for an arbitrary number of elements connected in series, in parallel, or
forming bridge structure.
Consider, for example, a system consisting of two elements with total failures connected in
parallel. The elements have nominal performance g1 and g2 (g1<g2) and constant availability p1 and
p2, respectively. The u-functions of the individual elements are
(1 p1 )z 0 p1z g1 and
(1 p 2 )z 0 p 2 z g 2 , respectively. The u-function for the entire MSS is
U MSS (z) (u1 (z), u 2 (z)] [(1 p1 )z 0 p1z g1 , (1 p 2 )z 0 p 2 z g 2 ] ,
which for MSSc takes the form
U(z) (1 - p1 )(1 - p 2 )z 0 p1 (1 - p 2 )z g1 p 2 (1 - p1 )z g 2 p1p 2 z g1 g 2
and for MSSs takes the form
U(z) (1 - p1 )(1 - p 2 )z 0 p1 (1 - p 2 )z g1 p 2 (1 - p1 )z g 2 p1p 2 z max(g 1 , g 2 )
(1 - p1 )(1 - p 2 )z 0 p1 (1 - p 2 )z g1 p 2 z g 2 .
The measures of the system output performance obtained according to (7), (10) and (12) for both
types of MSS are presented in Table 1.
12
MSS RELIABILITY OPTIMIZATION PROBLEMS
The UGF technique allows system performance distribution and, thereby, its reliability index to
be evaluated based on a fast procedure. The system reliability can be obtained as a function of its
structure (topology and number of elements), performance rates, and reliability values of its
elements. Therefore, numerous optimization problems can be formulated in which the optimal
composition of all or part of the factors influencing the entire MSS reliability has to be found
subject to different constraints (e.g. system cost). The following is a brief description of these
problems.
In order to provide a required level of system reliability, redundant elements are included.
Usually engineers try to achieve this level with minimal cost. The problem of total investment cost
minimization, subject to reliability constraints, is well known as the redundancy optimization
problem. The redundancy optimization problem for a MSS, which may consist of elements with
different performance rates and reliability, is a problem of system structure optimization.
In order to solve practical problems in which a variety of products exist on the market and
analytical dependencies are unavailable for the cost of system components, the reliability engineer
should have an optimization methodology in which each product (version of a system element) is
characterized by its productivity, reliability, and price. To find the optimal system structure, one
should choose the appropriate versions from a list of available products for each type of equipment,
as well as the number of parallel elements of these versions. The objective is to minimize the total
cost of the system subject to the requirement of meeting the demand with the desired level of
reliability. In this case, a solution quality index should comprise both reliability and cost
estimations [3,4,46,47].
In the simplest MSS structure optimization problem (homogenous structure optimization) each
subsystem can contain only identical elements. This optimization problem is relevant to cases in
13
which contracting or maintenance considerations prevent purchasing or using different elements of
the same type. In some cases, such a limitation can be undesirable or even unacceptable for two
reasons:
- By allowing different versions of the elements to be allocated in the same system component,
one can obtain a solution that provides the desired reliability level with a lower cost than in the
solution with identical parallel elements.
- In practice, the designer often has to include additional elements in the existing system. It may
be necessary, for example, to modernize a system according to new demand levels or according to
new reliability requirements. Some system components can contain elements of versions
unavailable for the time being. In this case, some elements with the same functionality but with
different parameters should compose the components. Therefore, in the general case the MSS
structure optimization problem should be solved without limitation on the diversity of versions of
elements [48].
The above-mentioned problem of optimal single stage MSS expansion to enhance its reliability
and/or performance is an important extension of the structure optimization problem. In this case,
one has to decide which elements should be added to the existing system and to which component
they should be added.
During the MSS lifetime, the demand and reliability requirements can change. To provide a
desired level of MSS performance, management should develop the multistage expansion plan. For
the problem of optimal multistage MSS expansion [49], it is important to answer not only the
question of what must be included into the system, but also the question of when.
By optimizing the maintenance policy, one can achieve the desired level of system reliability
(availability) requiring the minimal cost. The technique of UGF allows the entire MSS reliability to
be obtained as a function of the reliabilities of its elements. Therefore, by having estimations of the
influence of different maintenance actions on the elements’ reliability, one can evaluate their
influence on the entire complex MSS containing elements with different performance rates and
14
reliabilities. An optimal policy of maintenance can be developed which would answer the following
questions: 'which elements should be the focus of maintenance activity?' and 'what should the
intensity of this activity be?' [50,51].
Since the maintenance activity serves the same role in MSS reliability enhancement as does
incorporation of redundancy, the question arises as to what is more effective. In other words, should
the designer prefer a structure with more redundant elements and less investment in maintenance or
vise versa? The optimal compromise should minimize the MSS cost while providing its desired
reliability. The joint maintenance and redundancy optimization problem [52] is to find this optimal
compromise taking into account differences in reliability and performance rates of elements
composing the MSS.
Finally, the most general optimization problem is optimal multistage modernization of MSS
subject to reliability and performance requirements [53]. In order to solve this problem, one should
develop a minimal-cost modernization plan that includes maintenance, modernization of elements,
and system expansion actions. The objective is to provide the desired reliability level while meeting
the increasing demand during the whole lifetime of the MSS.
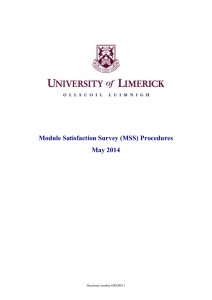
One can see that some of the formulated problems are extensions of other problems and inherit
their basic properties. The hierarchy of the problems is presented in Fig. 2. The basis for solving
these problems is the evaluation of the reliability for MSS with the given structure, given
performance rate, and reliability of different elements. The procedure based on the UGF method
described above is fast enough to be used in optimization algorithms that are based on numerous
estimations of different configurations of MSS.
OPTIMIZATION TECHNIQUE
To solve all the complex combinatorial optimization problems, one can use the genetic
algorithm (GA)- a robust, universal search procedure.
15
GA maintains a population of individual solutions, each one represented by a finite string of
symbols encoding a possible solution in a given problem space. This space comprises all possible
solutions to the problem at hand.
GA exploits the idea of the “survival-of-the-fittest” and an interbreeding population to create a
novel and innovative search strategy. It iteratively creates new solutions from the old ones by
ranking the strings and interbreeding the fittest to create new strings, which are (hopefully) closer to
the optimum solution to the problem at hand. So in each generation, the GA creates a set of strings
from the bits and pieces of the previous strings, occasionally adding random new data to keep the
population from stagnating. The end result is a search strategy that is tailored for vast, complex,
multi-modal search spaces.
The detailed information on GA can be found in Goldberg’s comprehensive book [54], and
recent developments in GA theory and practice can be found in books [23,55]. It is recognized that
GAs have the theoretical property of global convergence [55]. Despite the fact that their
convergence reliability and convergence velocity are contradictory, for most practical, moderatesized combinatorial problems, the proper choice of GA parameters allows optimal solutions to be
obtained in a short time.
There are three basic steps in applying the GA to a specific problem:
First, one has to define the solution representation (encoding in a form of string of symbols)
and to determine the decoding procedure that evaluates the fitness of the solution represented by an
arbitrary string.
Second, one has to adapt the basic GA procedures to the given representation in order to
provide feasibility of new solutions produced by these procedures as well as by the inheritance of
basic properties of interbreeding solutions by their offspring.
Finally, one has to choose the basic GA parameters such as population size, probability of
random modifications of solutions etc. and formulate the algorithm termination condition in order to
provide the greatest possible GA efficiency (convergence speed).
16
The details of GA implementations for specific optimization problems can be found in [3,4,4653,56,57].
EXAMPLE OF STRUCTURE OPTIMIZATION FOR A SERIES-PARALLEL SYSTEM WITH
CAPACITY BASED PERFORMANCE MEASURE
Problem formulation
Consider a system consisting of N components connected in series. Each component of type f
contains a number of different elements with total failures connected in parallel.
For each component f there are Hf element versions available in the market. A vector of
parameters gfh, afh, cfh can be specified for each version h of element of type f. This vector contains
the nominal capacity, availability and cost of the element, respectively. The chosen structure of
system component f can be defined by the numbers of parallel elements of each version r(f,h) for
1fHf. The vectors rf={r(f,h)}, (1fN,1hHf), define the entire system structure. For given set of
vectors ={r1,r2,...,rN} the total cost of the system can be calculated as
C() =
N
Hf
r(f, h)c fh .
f =1 h =1
The problem of series-parallel system structure optimization is as follows: find the minimal
cost system configuration * that provides the required availability level EA* for the given demand
distribution W, T:
* arg{C( ) min | E A ( W, T, ) E A *} .
Solution representation and decoding procedure
To provide a possibility of choosing a combination of elements of different versions, the GA
deals with L length integer strings, where L is the total number of versions available:
L
N
Hf .
f 1
17
Each solution is represented by string S={s1,s2,...,sL}, where for each
j
f 1
H i h.
i 1
sj denotes the number of parallel elements of type f and version h: r(f,h)=sj.
For example, for a problem with N=3, H1=3, H2=2 and H3=3, L is equal to 8 and string {0 2 1 0
3 4 0 0} represents a solution in which the first component contains 2 elements of version 2 and 1
element of version 3, the second component contains 3 elements of version 2, and the third
component contains 4 elements of version 1.
Applying the UGF technique the following procedure for EA index evaluation is used. The ufunction of the individual element with total failure is
u(z)=azg+(1-a)z0=azg+1-a,
where a is availability of the element and g is its nominal capacity. Since the capacity gfh and
availability afh are given for each element of type f and version h and number of such elements is
determined by the j-th element of string S, one can represent the u-function of the subsystem
containing r(f,h) parallel identical elements as
u fh (z) = (a fh z g fh (1 - a fh )) r(f, h) .
This equation is obtained by using operator (13) with function (14) corresponding to parallel
elements with capacity based performance.
To obtain the u-function for the entire component f represented by elements of string S with
f 1
position numbers from
Hi 1
i 1
f
to
Hi ,
one can use the same operator over u-functions
i 1
ufh(z) for 1hHf :
Hf
U f (z) (u f1 (z),..., u fH f (z)) u fh (z)
h 1
Vf
k z k ,
k 1
where Vf is a total number of different states of the component f, k is the output performance rate
of the component in state k and k is the probability of the state k.
18
In the case of capacity based MSS, in any combination of states of components connected in
series in which at least one component has performance rate lower than the demand, the output
performance of the entire system is also lower than the demand. In this case there is no need to
obtain the u-function of the entire system from u-functions of its components connected in series.
Indeed, if considering only the part of polynomial Uf(z) that provides capacity exceeding given
demand level Wm, one has to take into account only elements for which kWm. Therefore, the
following sum should be calculated:
A (U f (z) , Wm )
k .
k Wm
One can calculate the probability of providing capacity, which exceeds the level W m for the
entire system containing N components connected in series as
N
A( Wm ) A ( U f (z), Wm )
f =1
and obtain the total EA index for the variable demand using Eq. (9).
In order to let the genetic algorithm look for the solution with minimal total cost and with E A
which is not less than the required value EA*, the solution quality (fitness) is evaluated as follows:
N Hf
= - (E A * E A )
r(f, j)
c ij ,
f =1 j=1
where
x, x 0,
(x) =
0 , x < 0,
and and are sufficiently large real numbers.
Numerical example
A power station coal transportation system which supplies the boiler consists of five basic
components:
1. Primary feeder which loads the coal from the bin to the primary conveyor;
2. Primary conveyor which transports the coal to the stacker-reclaimer;
19
3. Stacker-reclaimer which lifts the coal up to the burner level;
4. Secondary feeder which loads the secondary conveyor;
5. Secondary conveyor which supplies the burner feeding system of the boiler.
Each element of the system is considered as a unit with total failures. The characteristics of
products available in the market for each type of equipment are presented in Table 2. This table
shows availability a, nominal capacity g (given as a percentage of the nominal boiler capacity) and
unit cost c. Table 3 contains the data of the piecewice cumulative boiler demand curve.
The minimal cost system structures obtained for different desired values of index EA* are
presented in Table 4. Optimal solutions for a system in which each component can contain only
identical parallel elements are given for comparison. System structure is represented by the ordered
sequence of strings. Each string has format f: r1*h1,… ri*hi,…,rk*hk, where f is a number denoting
system component, ri is a number of elements of version hi belonging to the corresponding
component.
One can see that the algorithm allocating different elements within component allows for much
more effective solutions to be obtained. For example, the cost of the system configuration with
different parallel elements obtained for E*=0.975 is 21% less than cost of the optimal configuration
with identical parallel elements.
The detailed description of the optimization method applied to MSS with capacity and
processing speed-based performance measures can be found in [3,4,48,56]. Structure optimization
for MSS with bridge topology is described in [4,47,57].
CONCLUSIONS
The universal generating function (UGF) technique allows reliability engineers to find the
entire MSS performance distribution based on the performance distributions of its components.
Applying the UGF one can find variety of MSS reliability indices for series-parallel systems and
20
systems with bridge topology by using the same procedures for MSS with different physical nature
of performance. The UGF technique can be applied for real-world problems of MSS reliability
analysis where great number of system states need to be evaluated, which makes it difficult to use
traditional techniques. Combination of fast UGF-based procedure for reliability evaluation with
genetic algorithm, a universal optimization method based on principle of evolution, provides a tool
for solving wide range of MSS optimization problems including redundancy and maintenance
optimization and multistage modernization planning.
REFERENCES
1.
Billinton R, Allan R. Reliability Evaluation of Power Systems, Plenum Press, 1996.
2.
Aven T. Availability evaluation of flow networks with varying throughput-demand and deferred repairs. IEEE
Transactions on Reliability 1990; 38: 499-505.
3.
Levitin G, Lisnianski A, Ben-Haim H, Elmakis D. Redundancy optimization for series-parallel multi-state
systems. IEEE Transactions on Reliability 1998; 47:(2):165-172.
4.
Lisnianski A, Levitin G, Ben-Haim H. Structure optimization of multi-state system with time redundancy.
Reliability Engineering and System Safety 2000; 67: 103-112.
5.
Gnedenko
B,
Ushakov
I.
Probabilistic
Reliability
Engineering.
John
Wiley
&
Sons,
Inc,
NY/Chichester/Brisbane, 1995.
6.
Murchland J. Fundamental concepts and relations for reliability analysis of Multistate systems, Reliability and
Fault Tree Analysis, in Theoretical and Applied Aspects of System Reliability 1975; SIAM: 581-618.
7.
El-Neveihi E, Proschan F, Setharaman J. Multistate coherent systems, J. Applied Probability 1978; 15: 675688.
8.
Barlow R, Wu A. Coherent systems with multistate components. Math. Operation Research 1978; 3: 275-281.
9.
Ross S. Multivalued state component systems. Annals of Probability 1979; 7: 379-383.
10.
Griffith W. Multistate reliability models. J. Applied Probability 1980; 17: 735-744.
11.
Butler D. A complete importance ranking for components of binary coherent systems with extensions to
multistate systems. Naval Research Logistics Quarterly 1979; 26: 556-578.
12.
Block H, Savits T. Decomposition of Multistate monotone system. J. Applied Probability 1982; 19: 391-402.
21
13.
Natvig B, Streller A. The steady-state behavior of multistate monotone systems. J. Applied Probability 1984;
21: 826-835.
14.
Wood A. Multistate Block Diagrams and Fault Trees. IEEE Transactions on Reliability 1985, 34: 236-240.
15.
Garriba S, Mussio P, Naldi F. Multivalued logic in the representation of engineering systems, in Synthesis and
analysis methods for safety and reliability studies, Apostolakis G, Garriba S, Volta G. eds., Plenum Press, 1980;
183-197.
16.
Yau M, Apostolakis G, Guarro S. The use of prime imlicants in dependability analysis of software controlled
systems. Reliability Engineering and System Safety 1998; 62: 23-32.
17.
Pouret O, Collet J, Bon J-L. Evaluation of the unavailability of a multistate-component system using a binary
Model. Reliability Engineering & System Safety 1999; 66: 13-17.
18.
Kolowrocki K., An asymptotic approach to multistate systems reliability evaluation, in Recent advances in
reliability theory, methodology, practice and inference, Limnios N, Nikulin M, eds., Birkhauser, 2000: 163-180.
19.
Aven T. On performance measures for multistate monotone systems, Reliability Engineering and System
Safety 1993: 41: 259-266.
20.
Painton L, Campbell J. Genetic algorithm in optimization of system reliability, IEEE Trans. Reliability 1995:
44: 172-178.
21.
Coit D, Smith A. Reliability optimization of series-parallel systems using genetic algorithm, IEEE Trans.
Reliability 1996; 45: 254-266.
22.
Yang J, Hwang M, Sung T, Jin Y. Application of genetic algorithm for reliability allocation in nuclear power
plant, Reliability Engineering & System Safety 1999; 65: 229-238.
23.
Gen M, Kim J. GA-based reliability design: state-of-the-art survey, Computers ind. Engng 1999; 37: 151-155.
24.
Gen M, Cheng R. Genetic Algorithms and engineering design, John Wiley & Sons, New York, 1997.
25.
Kumar A, Pathak R, Gupta Y, Genetic algorithm-based reliability optimization for computer network
expansion, IEEE Trans. Reliability 1995; 44: 63-72.
26.
Levitin G, Mazal-Tov Sh, Elmakis D. Genetic algorithm for optimal sectionalizing in radial distribution
systems with alternative supply, Electric Power Systems Research 1995; 35:149-155,.
27.
Dengiz B, Altiparmak F, Smith A. Efficient optimization of all-terminal reliable networks, using an
evolutionary approach, IEEE Trans. Reliability 1997; 46: 18-26.
28.
Deeter ., Smith A, Economic design of reliable networks, IIE Transactions 1998; 30: 1161-1174.
29.
Cheng S. Topological optimization of a reliable communication network, IEEE Trans. Reliability 1998; 47:
23-31.
22
30.
Bartlett L, Andrews J. Efficient basic event ordering schemes for fault tree analysis, Quality and reliability
engineering International 1999; 15: 95-101.
31.
Shao S, Murotsu Y. Approach to failure mode analysis of large structures, Probabilistic engineering Mechanics
1999;14: 169-177.
32.
Yangping Z, Bingquan Z, DongXin W. Application of genetic algorithms to fault diagnosis in nuclear power
plants, Reliability Engineering & System Safety 2000; 67: 2: 153-160.
33.
Wen. F, Chang. C. A new approach to fault diagnosis in electrical distribution networks using a genetic
algorithm, Artificial Intelligence in Engineering 1998; 12: 69-80.
34.
Wen. F, Han Zh, Fault section estimation in power systems using a genetic algorithm. Electric Power Systems
Research 1995; 34: 165-172.
35.
Martorell S., Carlos S., Sanchez A., Serradell V., Constrained optimization of test intervals using a steady-state
genetic algorithm. Reliability Engineering & System Safety 2000; 67: 215-232.
36.
Marseguerra M, Zio E. Optimizing maintenance and repair policies via a combination of genetic algorithms
and Monte Carlo simulation. Reliability Engineering & System Safety 2000; 68: 69-83.
37.
Rocco C, Miller A, Moreno J, Carrasquero N, Medina M. Sensitivity and uncertainty analysis in optimization
programs using an evolutionary approach: a maintenance application, Reliability Engineering & System Safety
2000; 67: 249-256.
38.
Monga A, Zuo M. Optimal system design considering maintenance and warranty. Computers and Ops. Res.
1998; 25: 9: 691-705.
39.
Munoz A, Martorell S, Serdarell V. Genetic algorithms in optimizing surveillance and maintenance of
components, Reliability Engineering & System Safety 1997; 57: 2: 107-120.
40.
Brunelle R, Kapur K. Review and classification of reliability measures for multistate and continuum models.
IIE Transactions 1999; 31: 1171-1180.
41.
Ushakov I. A universal generating function. Soviet J. Comput. Systems Sci. 1986; 24: 37-49.
42.
Ushakov I. Optimal standby problem and a universal generating function. Soviet J. Comput. Systems Sci. 1987;
25: 61-73.
43.
Ushakov I. Reliability analysis of multi-state systems by means of a modified generating function. J. Inform.
Process. Cybernet. 1988; 34: 24-29.
44.
Ushakov I. The method of generalized generating sequences, European Journal of Operating Research 2000;
125: 2: 316-323.
45.
Lisnianski A, Ben Haim H, Elmakis D. Redundancy optimization for power station, Proceedings 10th
International Confer. Of Israel Society for Quality, Jerusalem, Israel, 1994: 313-318
23
46.
Lisnianski A, Levitin G, Ben-Haim H, Elmakis D. Power system structure optimization subject to reliability
constraints. Electric Power Systems Research 1996; 39: 145-152.
47.
Levitin G, Lisnianski A. Structure Optimization of Power System with Bridge Topology. Electric Power
Systems Research 1998; 45: 201-208.
48.
Levitin G, Lisnianski A, Elmakis D. Structure optimization of power system with different redundant
elements, Electric Power Systems Research 1997; 43: 19-27.
49.
Levitin G. Multistate Series-Parallel System Expansion Scheduling Subject to Availability Constraints. to
appear in IEEE Transactions on Reliability 2000.
50.
Levitin G, Lisnianski A. Optimization of imperfect preventive maintenance for multi-state systems, Reliability
Engineering & System Safety 2000; 67: 193-203.
51.
Levitin G, Lisnianski A. Optimal replacement scheduling in multi-state series-parallel systems (short
communication). Quality and Reliability Engineering 2000; 16: 157-162.
52.
Levitin G, Lisnianski A. Joint redundancy and maintenance optimization for multistate series-parallel systems,
Reliability Engineering & System Safety 1998; 64: 33-42.
53.
Levitin G, Lisnianski A. Optimal multistage modernization of power system subject to reliability and capacity
requirements 1999, Electric Power Systems Research; 50: 183-190.
54.
Goldberg D. Genetic Algorithms in Search, Optimization and Machine Learning. Addison Wesley, Reading,
MA. 1989.
55.
Back T. Evolutionary Algorithms in Theory and Practice. Evolution Strategies. Evolutionary Programming.
Genetic Algorithms. Oxford University Press 1996.
56.
Levitin G, Lisnianski A. Structure optimozation of multi-state system with two failure modes. To appear in
Reliability Engineering & System Safety 2001.
57.
Levitin G, Lisnianski A. Survivability maximization for vulnerable multi-state systems with bridge topology.
Reliability Engineering & System Safety 2000; 70: 125-140
24
Table 1. Measures of system performance obtained for MSS.
Type
of MSS
MSSc
MSSs
A(W)
EU(W)
EG
0
p1p2
p2
p1+p2-p1p2
0
p2
p1+p2-p1p2
W-p1g1-p2g2
g1p1(p2-1)+g2p2(p1-1)+W(1-p1p2)
(1-p2)(W-g1p1)
(1-p1)(1-p2)W
W-p1g1-p2g2+p1p2g1
(1-p2)(W-g1p1)
(1-p1)(1-p2)W
W
p1g1+p2g2
p1(1-p2)g1+p2g2
W>g1+g2
g2<Wg1+g2
g1<W g2
0<Wg1
W>g2
g1<W g2
0<Wg1
Table 2. Characteristics of the system elements available in the market.
Component
No
Description
1
PRIMARY
FEEDER
2
PRIMARY
CONVEYOR
3
STACKERRECLAIMER
4
SECONDARY
FEEDER
5
SECONDARY
CONVEYOR
Version
number
g
%
a
c
mln $
1
2
3
4
5
6
7
1
2
3
4
5
1
2
3
4
1
2
3
4
5
6
7
8
9
1
2
3
4
120
100
85
85
48
31
26
100
92
53
28
21
100
60
40
20
115
100
91
72
72
72
55
25
25
128
100
60
51
0.980
0.977
0.982
0.978
0.983
0.920
0.984
0.995
0.996
0.997
0.997
0.998
0.971
0.973
0.971
0.976
0.977
0.978
0.978
0.983
0.981
0.971
0.983
0.982
0.977
0.984
0.983
0.987
0.981
0.590
0.535
0.470
0.420
0.400
0.180
0.220
0.205
0.189
0.091
0.056
0.042
7.525
4.720
3.590
2.420
0.180
0.160
0.150
0.121
0.102
0.096
0.071
0.049
0.044
0.986
0.825
0.490
0. 475
25
Table 3. Parameters of the cumulative demand curve.
Wm (%)
Tm (h)
100
4203
80
788
50
1228
20
2536
Table 4. Parameters of the optimal solutions.
E*A
Identical Elements
EA
C
Structure
0.975
0.977
16.450
0.980
0.981
16.520
0.990
0.994
17.050
1: 2*2
2: 2*3
3: 3*2
4: 3*7
5: 1*2
1: 2*2
2: 6*5
3: 3*2
4: 3*7
5: 1*2
1: 2*2
2: 2*3
3: 3*2
4: 3*7
5: 3*4
26
Different Elements
EA
C
Structure
0.976
12.855
0.980
14.770
0.992
15.870
1: 2*4,1*6
2: 6*5
3: 1*1, 1*4
4: 3*7
5: 3*4
1: 2*4,1*6
2: 2*3
3: 1*2,2*3
4: 3*7
5: 2*3,1*4
1: 2*4,1*6
2: 2*3
3: 2*2,1*3
4: 3*7
5: 3*4
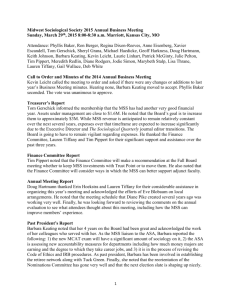
Figure Captions
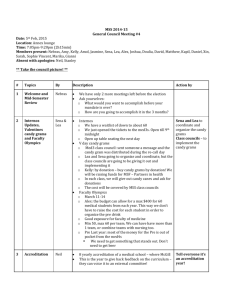
Figure 1: MSS reliability indices.
Figure 2: Hierarchy of MSS reliability optimization problems.
27
Authors' biographies:
Gregory Levitin received the BS and MS degrees in Electrical Engineering from Kharkov
Politechnical Institute (Ukraine) in 1982, the BS degree in Mathematics from Kharkov State
University in 1986 and PhD degree in Industrial Automation from Moscow Research Institute of
Metalworking Machines in 1989. From 1982 to 1990 he worked as software engineer and research
associate in the field of industrial automation. From 1991 to 1993 he worked at the Technion-Israel
Institute of Technology as a postdoctoral fellow at the faculty of Industrial Engineering and
Management. Dr. Levitin is presently an engineer-expert at the Reliability Department of the I.E.C.
and adjunct lecturer at the Technion. His current interests are in operations research and artificial
intelligence applications in reliability and power engineering. He is senior member of IEEE.
Anatoly Lisnianski is an engineer-expert at the Reliability Department of I.E.C. He received his
BS and MS degrees in Electrical Engineering from Leningrad Institute of the Precision Mechanics
and Optics in 1975 and PhD degrees in Reliability in 1984 from Central Research Institute for
Naval Electrical Engineering in Leningrad (Russia) where he worked from 1975 to 1989 as senior
researcher. He joined the I.E.C. in 1991. His research interests include reliability, applied
probability and operations research. He is senior member of IEEE.
28
Fig. 1
P(GMSS x)
Unsupplied
Demand
EU
W
A(W)
x
EG
29
Fig. 2
Optimal multi-stage modernization including planning
of maintenance and expansion subject to changing
reliability and performance requirements
Multi-stage expansion of the existing system to
provide desired MSS reliability during its life time
Joint maintenance and redundancy optimization to
provide desired system reliability
Expansion of the existing system to
provide desired MSS reliability
Maintenance schedule optimization to
provide desired system reliability
System structure optimization (choosing elements from
a list of available products to include into the system)
System topology
Performance of elements
System reliability evaluation
30
Reliability of elements