Additional file 2: Methodology QTL-MLE
advertisement

1
Additional file 2 - Methodology QTL-MLE
Model for body weights
The piecewise-linear model for sheep weights was specified as follows:
4
8
j 1
j 8
yit b0 mSex i bij x jt bijSex i x jt it
where
yit = weight of animal i at age t (kg);
Sexi = if 1 if animal i is male, 0 if female;
xj1 = Age of animal (weeks);
Age c j
x jt
0
if Age c j 0
otherwise.
The breakpoints (knots) were set at c1 = 0, c2 = 43, c3 = 56, and c4 = 83(weeks #0). The
regression coefficients bi0, bi1, …, bi8 were modeled as random effects, bij = j + Bij; j = 0,
1, …, 8, and where the j were the overall fixed effects. The random effect deviations
were modeled as a multivariate normal distribution, Bi ~ N (0, Σ B ) . To make allowance
for any possible serial correlation resulting from the repeated measures data, an
exponential correlation structure was fitted to the random errors from within each animal,
i.e.,
cor(it1 , it2 ) exp( | t1 t2 |)
This is an extension of an autoregressive AR(1) error structure, which takes into account
unequally spaced recording times.
2
All data were included in this analysis, including those only weighed once. The Model
fitting was conducted using ASReml.
QTL
Animal
M1
M2
M3
M4
M5
M6
M7
1
1
2
12
12
1
2
12
2
12
12
12
1
12
1
1
3
12
1
1
1
12
1
2
…
d
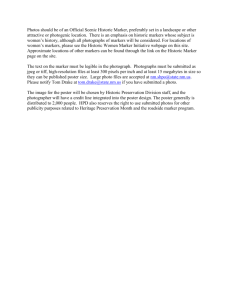
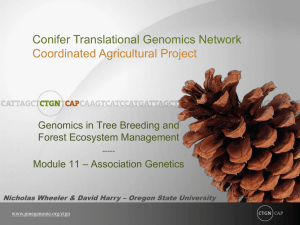
Figure: Illustration of the range of different sets of markers that can provide linkage
information for a QTL, for three hypothetical backcross animals each genotyped for the
paternal allele at seven marker loci M1, . . . , M7. The putative QTL is drawn as the
vertical line at position d. Genotypes, recorded as ‘1’, ‘2’ or ‘12’, are shown for each
marker locus. For each animal, the range of markers that provide information is shown
as the horizontal line
Calculation of QTL transmission probabilities
To calculate the transmission probabilities, we determine all the possible “pathways”
between unambiguous markers (starting at maker j = 0 ending at marker j = k + 1). (So
for example for the sequence ‘2–12–12–1’, consider all the possible F1 sire and Merino
3
dam gametes that could have produced this.)
It can be shown that the resultant
transmission probability is
k sij 1 sij k 1tij tij
p j1 p j 2
rj, j 1nj , j 1
p (m, q 1) i{i: ti ,k 1 gk 1 } j 0
j 1
p (q 1| m)
k
k
p (m)
sij
1 sij
1tij tij
rj , j 1n j , j 1 p j1 p j 2
i{i: ti ,k 1 g k 1 } j 0
j 1
where rj , j 1 is the probability of a recombination between markers j and j + 1
( n j , j 1 1 rj , j 1 ) in the sire gamete; rj, j 1 rj , j 1 if the putative QTL is not flanked by
markers j and j + 1, otherwise it is the probability of recombination between the markers
and of transmitting QTL allele Q (i.e. q = 1). To cater for the different pathways, the
following indicator variables have been introduced,
1 if marker j has genotype '1'
gj
0 otherwise (genotype '2')
j = 0, k + 1;
1 if recombination between marker j and j 1 for pathway i
sij
0 otherwise;
and
1 if ram transmits allele '1' at locus j, for pathway i
tij
0 otherwise,
which may be calculated recursively as tij ti , j 1 (1 si , j 1 ) (1 ti , j 1 ) si , j 1 , setting ti0 = g0
as required, depending on the genotype of the first informative marker of the genotype
sequence. The terms pj1 and pj2 are the frequencies of alleles ‘1’ and ‘2’ at locus j in the
Merino population, and maximum likelihood estimates for these can be obtained as
follows. Dropping the subscript j, let the allele frequency of 1, 2, and all other alleles be
p1, p2, and p3, with p3 = 1 – p1 – p2. Also, assume that the observed marker frequencies
4
are f1, f2, and f3 for genotypes 1x, 2x, and 12 respectively. Then the likelihood (ignoring a
constant) for these data is L (1 p2 ) f1 (1 p1 ) f2 (1 p3 ) f3 , for which the maximum
likelihood estimates are
pˆ1 0
pˆ 2
f3
f1 f3
pˆ 3
f1
f1 f3
if f1 f3 f 2
pˆ 3
f2
f 2 f3
if f 2 f3 f1
pˆ1
f3
f 2 f3
pˆ 2 0
pˆ1
f1
f1 f 2
pˆ 2
f2
f1 f 2
pˆ 3 0
pˆ1
f1 f 2 f3
f1 f 2 f3
pˆ 2
f 2 f1 f3
f1 f 2 f3
pˆ 3
f1 f 2 f3
f1 f 2 f3
if f1 f 2 f3
otherwise.