Butterfly Movements through a Landscape Mosaic
advertisement

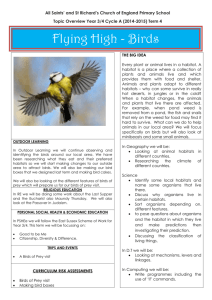
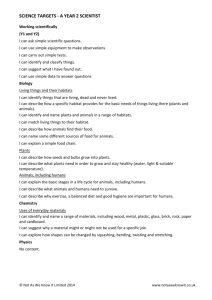
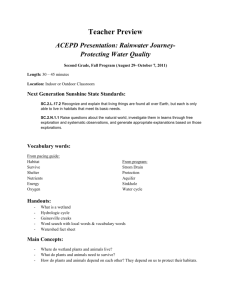
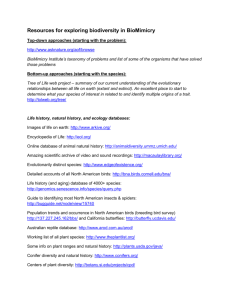
SERDP Quarterly Report July 17, 2006 BUTTERFLIES In May, 2006, we initiated several different studies to test how habitats may serve as conduits or barriers for butterfly movement. These studies will provide empirical data that will be used in future spatial modeling. Our studies fall into two groups: those that test movement choices at habitat boundaries, and those that test spatial aspects of movement paths in different habitat types. Our primary study species were small, wetland butterflies: Neonympha mitchellii francisci (St. Francis satyr, endangered), as well as surrogates for it, including Neonympha areolata (rare) and Satyroides appalachia (non-listed). These species share similar habitat requirements and all have two distinct adult flight periods per summer. For experiments that require direct handling of individuals, we only used S. appalachia. Using methods described here, we will continue to collect data throughout the summer, and we will conduct more detailed analyses of the complete data set in the fall. METHODS Testing Effects of Habitat Boundaries on Butterfly Movement Behaviors We employed two studies to investigate butterfly behaviors at habitat boundaries. In the first, we observed undisturbed butterflies in their natural habitats to determine how far butterflies move out of wetland habitats before returning to the wetland (if they return). To accomplish this, we first placed PVC poles to define boundaries between wetland habitats and forest habitats. These boundaries are arbitrary, as there is a continuous gradient of vegetative change moving from wetland to upland habitats. By determining visual boundaries that we can observe, we are able to then let butterflies show us where boundaries affect their movements, and later measure environmental characteristics that are restricting butterfly movements. An observer, standing near the boundary, visually followed a butterfly as it flew through the wetland habitat and as it approached the habitat boundary. When the butterfly turned back into the wetland, the observer noted the point where the ‘reflection’ occurred. Then, using a telescoping pole marked in 1m increments, the observer measured the distance between the reflection point and the habitat boundary defined by the PVC poles. Only one observation per individual butterfly was recorded. Because these data are relatively easy to gather, we collected them for many different species, including our focal wetland species and many others that occur in wetlands for comparative analysis. In the second experimental study, we established points at boundaries between different types of habitats across the landscape. These boundaries included all possible pairwise combinations of wetland, riparian forest, upland pine forest, open field, and developed habitats. We collected a butterfly from an area where the species was abundant, transported it to one of our pre-selected boundary points, and released it. Finally, we visually tracked the released butterfly until it was lost in one of the habitats and recorded the habitat it first flew into and the habitat in which it was lost. Each butterfly used was uniquely marked with an ultra-fine tip Sharpie pen to ensure that we did not use the same individual twice. Testing How Habitat Type Affects Butterfly Movement Behaviors We employed two studies to investigate butterfly movement through different habitats. In the first study, we tracked the movements of undisturbed butterflies in their native wetland habitats. The goal of this study is to collect spatial movement data on the species of concern without disturbing the individuals or their sensitive habitats. This method was viable for both the endangered and the surrogate wetland species. We will also be able to compare the movements of undisturbed butterflies in wetland habitats to movements of released butterflies in wetland habitats (described next) and calibrate the reliability of experimental releases. Wetland habitats are fragile and difficult to walk through. In them, we identified naturally occurring individuals, and visually followed them while recorded its position using digital compasses. Standing at fixed locations, two observers took synchronized compass bearings at 5 second intervals, sequentially triangulating the butterfly’s position as it moved through the habitat. Measurements were taken from the time they were first seen until the time they were lost. Care was taken not to track the same individual twice. Using Arc GIS, we will calculate the bearing and distance between triangulated points to construct a movement path. In the second study, we established experimental release points in different types of contiguous habitat across the landscape. The different habitat types included wetland, riparian forest, upland pine forest, and open field. We collected a butterfly from an area where the species was abundant, uniquely marked it, transported it to one of our pre-selected habitat points, and released it. Finally, we tracked the movements of the released butterfly as it flew through the habitat and collected data on spatial aspects of its movement. Whenever possible, we would recatch the butterfly after the experiment and return it to the area where it was originally caught. We collected spatial data on butterfly movement using two different techniques, depending on the type of habitat the butterfly was released in. In bottomland forests and wetlands, where the habitat was thicker or sensitive to disturbance, we could not physically follow a butterfly. In these habitats, we used the triangulation method described above. In upland pine forests and open fields, we were able to physically follow the butterfly while maintaining a suitable distance so as to not influence its movements. In these habitats, we physically followed a butterfly while dropping markers along its flight path at 10 second intervals. After the butterfly had completed its path, we measured the bearing and distance between sequential markers to construct a movement path. PRELIMINARY RESULTS Behaviors at Boundaries Between May 25-June 19, 2006, we recorded 54 observations of undisturbed butterflies as they moved toward or through wetland boundaries. Most of the S. appalachia observed turned back into the wetland precisely at the habitat boundary and all ‘reflections’ occurred within 3m of the boundary (Fig 1). Most of the N. m. francisci observed turned back before reaching the habitat boundary and all ‘reflections’ occurred within 5m of the boundary (Fig 1). For comparative purposes, we recorded data on other species that move through wetland habitats. For example, Papilio palamedes (a large, upland species) was equally likely to turn back into wetlands at any point along the gradient we measured, and many never turned back into the wetland (Fig 1), indicating that P. palamedes is not affected by wetland boundaries. In addition, between June 8-June 19, we released 9 S. appalachia butterflies at habitat boundaries. These data are not reported here, as we will complete analyses in the fall. Effects of Habitat Type on Movement Behavior Between June 8 –June 22 we released 20 S. appalachia butterflies in contiguous habitats. Here we report data from the movement paths of butterflies released in open and upland forest habitats. Although we have not completed rigorous statistical analyses, we present data here to show the types of information we plan to analyze in the fall. Currently, we are developing the GIS techniques for constructing movement paths from triangulated points of butterflies in other habitat types and will include those data in subsequent reports. For movement paths through open and upland forest habitats we have analyzed two aspects of movement behavior, vector length and turning angles between vectors. Vector length is the measured distance between two sequential markers. Turning angles are measured as the interior angle (<180 deg) between two sequential vectors. In both habitats, most vectors were less than 25m in length with a trend toward longer vectors in open fields (Fig 2). In both habitats, most turning angles were less than 45 degrees with a slight trend toward smaller turning angles in open fields (Fig 3). In addition, we recorded the movement paths of 5 undisturbed N. areolata butterflies and 1 S. appalachia butterfly in their native wetland habitat. Results from analyses of these data will be included in later reports. Figure 1. For each species, the bars represent the frequency with which butterflies that moved through wetland habitat would ‘reflect’ back into the wetland when encountering a habitat boundary. Distance, along the x-axis, shows the point of reflection from 5m within the wetland boundary up to 5m beyond the wetland boundary, into the forest. Distance of Reflection back into Wetland 0.5 S.appalachia, n=11 0.4 Frequency N.m.francisci, n=18 P. palamedes, n=5 0.3 0.2 0.1 0 5m 4m 3m 2m 1m Edge 1m 2m Wetland (within edge) 3m 4m 5m Forest (beyond edge) Figure 2. For each habitat, the bars represent the frequency with which S. appalachia movement vectors were comprised of categorical lengths. Vectors are incremental components (n) of entire movement paths (N). Movement Vector Lengths 0.5 Frequency 0.4 Open (N=4, n=38) 0.3 Upland (N=8,n=57) 0.2 0.1 0 0-6 m 7-1 2m 13 -18 m 19 -24 m -30 25 Length m 31 -36 m 37 -50 m Figure 3. For each habitat, the bars represent the frequency with which categorical angles occurred between S. appalachia movement vectors. Angles are incremental components (n) of entire movement paths (N). Turning Angles Between Vectors 0.6 Frequency Open N=4, n=34 Upland N=8, n=50 0.4 0.2 0 0-45 46-90 91-135 Amount of Turn (deg) 135-80 RED COCKADED WOODPECKERS Historic Movement Records Investigation We are using records from a study population of woodpeckers in the North Carolina Sandhills region to evaluate the influence of vegetative cover on historic woodpecker dispersal movements. More than 25,600 observations of bird locations have been collected on Ft. Bragg, Camp McCall, and surround areas since 1981. Among these records, we identified 3,453 between-territory movements. To facilitate results that are timely and pertinent to Department of Defense lands, we restricted data to observations of among-year movements that occurred on Ft. Bragg and Camp McCall, and those recorded since 1990. Six hundred and eighteen dispersal records meet these criteria. Red-cockaded woodpeckers occur in groups, where individuals are characterized by different social roles that can be broadly classified into breeders, non-breeding helpers, or fledglings. Individuals from outside groups may also occur as floaters, or birds may reside as solitary individuals. Motivations for dispersal, the movements made by individuals, and the factors affecting dispersal paths may differ among these groupings. Further, when birds move from one territory to another, they also often transition among social classes, and these transitions may affect dispersal movements. For example, a juvenile may disperse to a territory where it becomes a breeder, while another juvenile may disperse and become a helper. Because the two birds employ differential dispersal strategies, they may also use a different set of landscape cues when selecting movement paths and destination territories. To incorporate the potential for differential dispersal strategies into our analyses, we associated each geographic movement with one of the 18 social class transition types outlined in figure 1. A geographic information system (GIS) database was structured to relate the historic dispersal movements of red-cockaded woodpeckers on Ft. Bragg and Camp McCall to landscape features. We obtained geographic data about nest-trees and forest stand characteristics from the Ft. Bragg Endangered Species Branch. We then used Arc View 3.3 (ESRI, Redlands, CA) and the associated X-Tools (Oregon Department of Forestry, Salem OR) and Animal Movement (Hooge and Eichenlaub; USGS, Anchorage, AK) extensions to derive GIS representations of nest tree locations and movement paths between territories. Polygons buffering breeding territory centers by 200 M, and dispersal paths by 0.5 M, 100 M, and 200 M were derived with ArcToobox (ESRI, Redlands, CA) to represent use and travel areas. Figure 1. Frequency and type of social status changes associated with geographic movements of Redcockaded woodpeckers in Ft. Bragg and Camp McCall study population after 1990. Social Class Changes Fledge C A G Floater J K F Q D B E H R L S Helper Breeder N P M O Solitary A I Transition A B C D F G H I J K L M O Q R S Female 28 16 183 9 11 4 0 126 1 6 0 0 0 0 0 3 Male 17 25 35 75 9 0 7 36 2 1 4 3 2 1 9 5 Landscape vegetation characterizing red-cockaded woodpecker territories and dispersal paths, were evaluated with the GIS. Breeding territory and travel corridor polygons were intersected with the tree stand data to derive vegetation characteristics. Twenty vegetation-associated variables were assessed within polygons surrounding territory centers, and 33 variables were evaluated within the dispersal paths. Variables referenced the number, density, and basal areas of pine and hardwood trees within three different diameter classes. Additionally, the amount of open area, nest trees, and woodpecker territories intersected by the polygons were recorded. To provide insight into the differences in landscape characteristics of travel corridors selected by birds, and those that were not selected, we then repeated analyses for all of the dispersal destination territories and travel corridors that were available to dispersing woodpeckers, but were not used. In total, vegetation information was evaluated for 519 territories, 618 dispersal paths used by woodpeckers, and 10,850 unused dispersal paths. In the months to come, we will analyze the movement and vegetation data described above. First, the number of vegetation-associated variables will be reduced from the current 119 to a more reasonable number. Values for vegetation characteristics will be associated with both actual woodpecker dispersal paths and unused paths, which will allow a comparison of used and unused landscape features. Statistical models representing hypotheses about the influence of vegetation characteristics on dispersal will then be fitted to the data using logistic regression (PROC Logistic; SAS, Cary, NC). Each model will be comprised of biologically relevant combinations of variables that represent the potential influences of pine, hardwood, open area, and nest tree vegetation structures on the movement of woodpeckers. The statistical models will then be ranked using a model selection technique (e.g., AIC, BIC, or CP statistic). The resulting top-ranked model, or set of top-ranked models, will provide insight into the relative influence of vegetation characteristics and nest trees on the dispersal movements of red-cockaded woodpeckers, which can be directly applied to the development of the spatially explicit decision support system. Telemetry Investigation Here we report preliminary analyses from the first year of our study on dispersal behavior of juvenile female red-cockaded woodpeckers (Picoides borealis) at Ft. Bragg, North Carolina. The birds were captured in their natal territories during the late winter and early spring of 2006 and fitted with 1.2 g radio transmitters, which were glued to the base of their two central tail feathers. We attempted to locate all radio-tagged birds at least once a day, but certain territories were sometimes inaccessible because of military training. Eighteen radio-tagged birds were tracked over periods of 16 to 79 days (mean = 53 days, SD = 17) between late February and mid-May, for a total of 949 bird-days. Signal distance was highly variable depending on topography, habitat use, and season. The signals were dampened when a bird was located in hilly terrain or near dense vegetation along drainages. Signal dampening also seemed to increase in late March and April as hardwoods leafed out. On average, the maximum distance at which radio signals could be detected was 1-2 km. Occasionally, foraying birds could not be pinpointed because of the above factors and/or constant movement. We stopped monitoring birds if they dropped their transmitters and could not be recaptured (n = 4), if they disappeared (n = 4), or if their transmitter expired (n = 3). The disappearances may have been due to dispersal far from the study area. Also, two of the four birds that disappeared had repeatedly forayed into the outer margin of the McPherson Impact Area. Our inability to search farther into the Impact Area may explain their apparent disappearance. We assumed that the four disappearances were not due to mortality because it is likely that the transmitters would have still functioned, enabling us to find the bird’s remains (unless of course the bird perished during a long distance foray). Moreover, the birds that disappeared no longer affiliated with their natal groups, suggesting that transmitter failure was not the cause and that the birds had left their natal territories. In mid-May, we stopped monitoring the seven remaining birds as six of the them had dispersed to known locations and the 7th had consistently affiliated with her natal group. The transmitters had no observable negative effects on any of the 18 subjects. Surprisingly, no mortality was documented during the study. We located the 18 birds a total of 584 times before they departed from their natal clusters, dropped their transmitters, or disappeared. Additional locations and movements occurred after birds had departed from their natal territories. In this report, however, we focus on the above 584 locations. We also summarize the fate (if known) of the 18 subjects. Ongoing collection and analysis of group composition data for the Sandhills population for the 2006 breeding season will hopefully reveal the fate of additional birds, including those that had dropped their transmitters or disappeared. Additional analyses of bird movement and dispersal behavior will be presented in subsequent reports. Foray Behavior – We define a foray as an extraterritorial prospecting movement that terminated with the bird returning to its natal territory prior to roost time. Forays were observed during 149 (25.5%) of the 584 pre-departure locations. Foray distances averaged 2.47 km (range = 0.4 to 9.2, SD = 1.61; Figure 2) from natal clusters. Foraying birds were usually found in the vicinity of cavity-tree clusters interacting with the resident group, but they were sometimes found foraging alone away from any group or cluster. The birds often forayed to several different clusters, but returned to the same clusters repeatedly. Foray frequency varied among individuals. The proportion of locations during which individual birds were on forays ranged from zero to 60% (mean = 24.8%). Also, Spearman’s rank correlation analysis of the six birds with ≥ 9 documented forays indicated that foray distance increased over time (all six correlations were positive, and four were statistically significant at P ≤ 0.05). The latter analysis indicates that the birds increased the range of their forays over time. Three birds dispersed to new home ranges from which they continued to foray to a new set of territories. In two of these cases, the birds roosted within a particular cluster and affiliated with the group associated with that cluster, but also forayed out to nearby territories. In the third case, the bird did not roost in a particular cluster or affiliate with a particular group, but instead roosted outside at several locations within 600 m of each other and forayed to nearby clusters. Note that these instances of secondary foray behavior were not included in the 149 instances of foraying discussed above. Departure dates – Departure dates were calculated as the date after which birds no longer affiliated with their natal territories. These data include (1) birds whose subsequent location(s) were known, (2) birds that disappeared but were known to no longer affiliate with their natal group, and (3) birds that dropped their transmitters and no longer affiliated with their natal groups. Departure dates could be determined for 12 birds. All of these dispersals occurred between March 31 and April 26 (Figure 3). Interestingly, half of these occurred over a five-day period in mid April. It should be noted, however, that two of the latter six birds were ones that had disappeared during that five-day period, but we assumed that they had departed rather than perished (see above). Fates of the Monitored Birds as of the 2006 Breeding Season – The fate of 12 of the radiotagged birds (not necessarily the same 12 as above) is known at this time. These include birds whose location was discovered weeks or months after their transmitters expired or were dropped. Three of the birds remained in their natal territories into the 2006 breeding season (mid-May); at least one of these birds was observed helping. Three of the birds dispersed to new territories and paired with males; at least one of these nested. Five birds dispersed to specific clusters occupied by intact breeding groups (i.e., with a breeding male and female), thus becoming “affiliated floaters”. One bird was a floater. Finally, the fate of six birds is unknown at this time. Number observed 30 20 10 0 .50 1.50 1.00 2.50 2.00 3.50 3.00 4.50 4.00 5.50 5.00 6.50 6.00 7.50 7.00 8.50 8.00 9.00 Foray distance Figure 2. Maximum distance from natal clusters during 149 forays by 17 juvenile female redcockaded woodpeckers. 7 6 Number 5 4 3 2 1 M ar 28-Ap r 4 Ap r 5-Ap r 12 Ap r 13-Apr 20 Ap r 21- Ap r 28 WEEK Figure 3. Dates of departure from natal clusters by juvenile female red-cockaded woodpeckers. LIDAR DATA An airborne LiDAR (light detection and range) instrument was flown over Ft. Bragg on the 1st, 2nd, and 3rd of July 2006 in a single-engine Cessna 207. The LiDAR instrument is an Optech ALTM 2050 LiDAR System collecting 50,000 simultaneous first and last returns per second. Flown at 4500 feet, this instrument produces a spot spacing of about 1 m, horizontal accuracy of 1 ft, and vertical accuracy of 95% at 0.6 ft. Geographic positioning on the aircraft was calibrated before and after each flight period by overflying two fixed GPS base-stations. After mounting the instrument at the beginning of each flight day attitude control, and the positioning and stability of the LiDAR instrument itself (Optech ALTM 2050 LiDAR System) collecting 50,000, which is mounted in the belly of the plane, were calibrated over known fixed points at nearby airport runways. About 50 E-W lines were flown, with 50% overlap and 500m line spacing. The area covered was approximately 140,000 acres One N-S line was flown perpendicular to the EW axis for geodetic control. Flight speed was approximately 120 knots. These data are now being preprocessed for us by the company Airborne 1 in El Segundo, California, and we should receive delivery of the data in about 2 weeks. I. ANIMAL MOVEMENT DATA 1. Butterflies. In May, 2006, we initiated several different studies to measure how habitats serve as conduits or barriers for butterfly movement. Our studies fall into two groups: those that test butterfly movement choices at habitat boundaries, and those that test spatial aspects of movement paths in different habitat types. These studies will provide empirical data that will be used in future spatial modeling. a. Between May 25-June 19, 2006, we recorded the movement behavior and geographical pathways of 54 undisturbed butterflies as they moved toward or through wetland boundaries. For comparative purposes, we also recorded data on other species that move through wetland habitats. b. Between June 8-June 19, we experimentally released 9 S. appalachia butterflies at habitat boundaries and tracked and recorded their movement behavior and pathsways. c. Between June 8 ?June 22 we experimentally released 20 S. appalachia butterflies in contiguous habitats and recorded their movement behavior and geographical pathways. d. Finally, we recorded the movement paths of 5 undisturbed N. areolata butterflies and 1 S. appalachia butterfly in their native wetland habitat. 2. Radio Telemetry of Red Cockaded Woodpeckers We have completed the first year of data collection using radio telemetry for our study on dispersal behavior of juvenile female red-cockaded woodpeckers (Picoides borealis) at Ft. Bragg, North Carolina. Eighteen birds were captured in their natal territories during the late winter and early spring of 2006 and fitted with 1.2 g radio transmitters, which were glued to the base of their two central tail feathers. We attempted to locate all radio-tagged birds at least once a day, but certain territories were sometimes inaccessible because of military training. The radio-tagged birds were tracked over periods of 16 to 79 days (mean = 53 days, SD = 17) between late February and mid-May, for a total of 949 bird-days. Signal distance was highly variable depending on topography, habitat use, and season. The signals were dampened when a bird was located in hilly terrain or near dense vegetation along drainages. Signal dampening also seemed to increase in late March and April as hardwoods leafed out. On average, the maximum distance at which radio signals could be detected was 1-2 km. Occasionally, foraying birds could not be pinpointed because of the above factors and/or constant movement. We stopped monitoring birds if they dropped their transmitters and could not be recaptured (n = 4), if they disappeared (n = 4), or if their transmitter expired (n = 3). Two of the four birds that disappeared had repeatedly forayed into the outer margin of the McPherson Impact Area. Our inability to search farther into the Impact Area may explain their apparent disappearance. We located the 18 birds a total of 584 times before they departed from their natal clusters, dropped their transmitters, or disappeared. The transmitters had no observable negative effects on any of the 18 subjects, and no mortality was documented during the study. II. SPATIAL DATA DEVELOPMENT 1. LiDAR Data Collection An airborne LiDAR (light detection and range) instrument was flown over Ft. Bragg on the 1st, 2nd, and 3rd of July 2006 in a single-engine Cessna 207. The LiDAR instrument is an Optech ALTM 2050 LiDAR System collecting 50,000 simultaneous first and last returns per second. Flown at 4500 feet, this instrument produces a spot spacing of about 1 m, horizontal accuracy of 1 ft, and vertical accuracy of 95% at 0.6 ft. Geographic positioning on the aircraft was calibrated before and after each flight period by overflying two fixed GPS base-stations. After mounting the instrument at the beginning of each flight day attitude control, and the positioning and stability of the LiDAR instrument itself (Optech ALTM 2050 LiDAR System) collecting 50,000, which is mounted in the belly of the plane, were calibrated over known fixed points at nearby airport runways. About 50 E-W lines were flown, with 50% overlap and 500m line spacing. The area covered was approximately 140,000 acres One N-S line was flown perpendicular to the E-W axis for geodetic control. Flight speed was approximately 120 knots. These data are now being preprocessed for us by the company Airborne 1 in El Segundo, California, and we should receive delivery of the data in about 2 weeks. Concerns 2006JUL My major concern about the project at this point has to do with funding. The radio-telemetry work described in the Accomplishments section took place in February, March, and April 2006. However our grant did not start until May 12 2006. Jeff Walters at Virginia Tech had to cover these costs with money from other projects, and he has not been able to get these costs reimbursed off of his subcontract for this project. In addition, we will run into exactly the same problem in Feb-Apr 2007, Since, presumably, our second year of funding won't begin until May 2007. I would very much like to avoid this. Finally, our actual spending is behind schedule because we have not yet been able to charge the work done in FebApr to this grant.