An ensemble method for sea level data assimilation over continental
advertisement

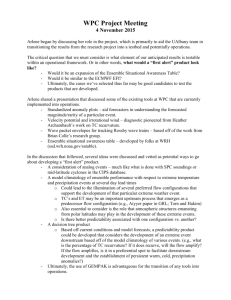
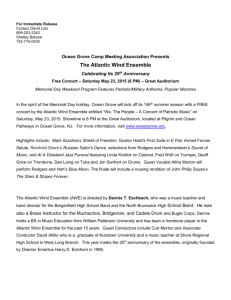
An ensemble method for sea level data assimilation over continental shelves: exploration of model errors due to uncertainties in bathymetry and application to the design of forthcoming altimeter systems. Baptiste Mourre (1), Pierre De Mey (2), Florent Lyard (2) and Christian Le Provost (1) Institut de Ciències del Mar, Passeig Marítim 37-49, 08003 Barcelona, Spain E-mail: mourre@icm.csic.es (2) LEGOS, 14, av Edouard Belin, 31400 Toulouse, France Abstract This study explores model error statistics due to uncertainties in bathymetry in a barotropic model via the use of an ensemble method. The case concerns the finite-element MOG2D model, implemented on the European continental shelf. An ensemble of synthetic perturbed bathymetric solutions is generated by randomly combining over the study domain elementary perturbations extracted from typical mismatches between different existing bathymetric databases. Associated model error covariances are shown to be non-homogeneous, non-isotropic and non-stationary over the shelf. An ensemble Kalman filter is then implemented to assimilate sea level data into the model, with the intention of assessing the capability of different sea level observing networks (including future altimeter scenarios and tide gauges) to reduce model errors. Multiple twin experiments are performed. The diagnostic used for the comparison of the performance of observing networks is based on the reduction of the ensemble spread thanks to the assimilation. 1) Introduction The case of data assimilation over continental shelves is more complex than it is in the open ocean. In particular, model error statistics that are needed for data assimilation experiments are generally unknown in coastal regions (Robinson et al. 1998, Echevin et al. 1998, Auclair et al. 2003). These are moreover likely to be strongly timedependent due to the short temporal scales of shelf dynamics. This is the reason why data assimilation has to be performed with a special care in these areas. In particular, detailed studies about model error covariances are first required to enable their appropriate specification during the assimilation. Such a detailed study using an ensemble method is presented in this paper. Ensemble methods are effectively well suited in this context since they make it possible to provide empirical information about model error statistics. Error covariances are effectively directly computed from an ensemble of “possible states” of the ocean generated by the model itself. We use the nonlinear barotropic model MOG2D (Greenberg and Lyard, personal communication; Carrère and Lyard 2003), implemented over the entire European shelf. Figure 1 illustrates the modeling domain and a sample of the finiteelement mesh used for this study. Figure 1. Right: bathymetry of the modeling area (delimited by the red line). Left: finite-element mesh used in the black box. Moreover, we concentrate on the ocean response to wind and pressure forcing. Atmospheric fields are taken from ECMWF analysis, gridded every 1.125º with a 6-hour temporal resolution. Therefore, oceanic processes under consideration are mainly high-frequency gravity waves. These waves are responsible for an energetic sea level variability (with amplitudes of many tens of centimeters) with temporal scales ranging from a few hours to a few days. The simulation period is a 25-day period from 7 to 31 December 1998. In this context of barotropic shelf dynamics, bathymetric uncertainties represent a potential source of error for the model. Our insufficient knowledge of bottom topography in most shallow regions of the world makes the introduction of such errors generally unavoidable. As an illustration, figure 2 displays the RMS dispersion of gravity wave speed estimates ( gH ) computed from five different bathymetric databases (ETOPO2, DBDB5, TERRAINBASE, SMITH&SANDWELL 6.2, SHOM) in the Bay of Biscay and the English Channel. This dispersion reaches values up to 60 % of the local gravity wave speed estimate next to the coast and along the shelf break. As trapped gravity waves essentially propagate along these two guides, one can expect a significant impact of these topographic uncertainties on the free surface model. This particular impact is investigated here in the context of data assimilation, in other words with a focus on the associated model error statistics. generated by perturbing a reference bathymetric solution (the one from the SHOM1 in our case) with a random combination of elementary perturbations over the study domain. These elementary perturbations are extracted from typical mismatches between the 5 above-mentioned existing bathymetric databases. They are divided into 6 types: littoral and shelf perturbations, shelf break perturbations, deep ocean perturbations, perturbations in straits, horizontal offsets and vertical offsets. In concrete terms, each global perturbation is a linear combination with random coefficients of a random number of random shapes of each type, applied at random locations in their geographic domain of validity (e.g. a shelf perturbation shape is always applied on a shelf). The random numbers used at each step of this procedure are taken from Gaussian distributions, whose spreads are determined in such a way that the final bathymetric ensemble dispersion approaches the empirical one computed from the sample of the 5 existing bathymetric solutions. Then the model run over these perturbed solutions leads to an ensemble of simulations providing empirical information about model error statistics and their evolution relative to this particular source of error. Mean sea level ensemble variances over the simulation period obtained by this approach are illustrated in figure 3. 1 2 (%) Figure 2. RMS dispersion of gravity wave speed estimates ( gH ) computed from 5 different bathymetric solutions (SHOM, SMITH&SANDWELL6.2, DBDB5, ETOPO2, TERRAINBASE) After the description of the shape and evolution of these statistics in section 2, the experiments aiming at comparing different observing networks considering in particular forthcoming altimeter systems are presented in section 3. 2) Model error due to uncertainties in bathymetry An ensemble of 100 bathymetric solutions is Figure 3. Mean sea level ensemble variances over the study period (cm2). The dark dashed line is the 200meter isobath. These are not homogeneous over the shelf. The signature of bathymetric errors on model sea level is for instance very weak in the Bay of Biscay, where the sea level response is very close to the inverse barometer (i.e. static response to pressure variations), which is not dependent on depth. On the contrary, significant values of sea level 1 Service Hydrographique et Océanographique de la Marine ensemble variances are reached in areas where the specific shelf dynamics prevails, characterized in particular by the propagation of energetic gravity waves which are sensitive to bathymetry. This is the case in the Channel or along Southern North Sea coast. Figure 4 illustrates the time evolution of these sea level ensemble variances at two locations on the North Sea shelf. They evolve very quickly, revealing that the signature of bathymetric errors on model sea level is not stationary at all. It is also worth noticing that this evolution is dependent on the location under consideration, since it strongly depends on the oceanic processes at work in its vicinity. These processes, transient by nature, differ as we move over the shelf. Point 1 Point 2 Figure 5. Domains of influence (relative to sea level forecast) of a sea level observation at the Aberdeen tide gauge (2.1ºW, 57.1ºN) on Dec. 17 0am (a) and Dec. 21 0am (b). On the left panel, the size of this domain of influence relative to the sea level correction is around 100 km, giving an idea about the extent of the expected correction by a single sea level observation in such a model. The right panel illustrates how this shape varies with the evolution of the model state. The existence of a coastal wave at the observation time allows for instance a correction that is stretched alongshore. Assimilation schemes used in these areas also have to consider these evolving characteristics of error covariances. 3) Design of forthcoming altimeter systems Figure 4. Sea level ensemble variance time series at locations 1 and 2 represented in figure 3. Anyway, these properties of non-homogeneity and non-stationarity of sea level model error have to be considered in assimilation experiments that are performed in such regions. Common simplifications are no more valid here, and ad hoc exploration and modeling of error statistics are required. We illustrate in figure 5 the domain of influence of a single sea level observation on the North Sea shelf, and its evolution. The domain of influence is the area of significant correlations with the observed variable, in other words here the area in which the given sea level observation is likely to make it possible to correct model sea level. Here we arbitrarily define this domain of influence as the area of correlations higher than 0.6. In order to take into account the non-homogeneity, non-stationarity and non-isotropy of model error covariances, an ensemble Kalman filter (Evensen 2003) is implemented to assimilate sea level data in the model. Note that we now concentrate on the North Sea for these experiments. Multiple twin experiments are performed to evaluate the performance of a given observing system to reduce model error. In concrete terms, an ensemble of observations is simulated from a reference run, with random perturbations corresponding to the observational noise. These observations are then used to update the ensemble of model states. Observations are treated as random variables to avoid an underestimation of analysis ensemble variances (Burgers et al. 1998). The comparison of the ensemble spread without assimilation to the one with assimilation of data coming from a given observing scenario finally gives insights into the reduction of model error by the assimilation. Figure 6 illustrates this approach in the case of a single Jason satellite (10-day repititivity period), at location 1. Each vertical dotted line corresponds to an analysis, in other words to an altimeter track crossing the North Sea shelf. Only analysis associated with tracks coming in the vicinity (in the sense of the domain of influence of the observations) of the location under consideration are efficient for the local correction (see for instance analysis on Dec. 18 and 28). Figure 6. Time series at point 1 of ensemble sea level without assimilation (top), ensemble sea level with assimilation of Jason data (middle), and ensemble sea level variances in both cases (bottom). We limit the presentation of the results here to the global space-time reduction of ensemble variances over the whole domain and time period. The interested reader can find some illustrations of the local reduction at a given location all over the period of sea level ensemble variances, as well as illustrations of the spatial distribution of the correction at a given time in Mourre et al. (2006b). Nevertheless, these two illustrations are shown to be very dependent on either the location or the time under consideration, due to the spatial nonhomogeneity and non-stationarity of ensemble variances. By computing the space-time mean, we get rid of such dependencies and obtain a more robust diagnostic, leading to a single space-time global performance score for each observing scenario. 6,6 Jason 36,4 14,0 3 Jason 45,2 16,9 4 Jason 50,8 18,8 5 Jason 53,6 19,0 6 Jason 54,3 13,3 AltiKa3 (temp. offset) 43,9 15,4 WSOA (10-day orbit) 36,3 18,4 20 tide gauges - 6h 63,2 12,6 20 tide gauges - 12h 49,9 24,8 AltiKa3 + 20 tg - 6h 70,0 26,8 WSOA + 20 tg - 6h 0 5 Performances of constellations of Jason type satellites interleaved in time are considered in this histogram. It shows that the impact of additional satellites is in our case less and less significant as the number of satellites flying increases. Then AltiKa3 (Verron et al. 2001, Vincent and Thouvenot 2001), a constellation of 3 satellites flying in the Envisat 35-day orbit and interleaved in time, leads to similar performances as a constellation of 3 Jason type satellites. WSOA (Fu 2003), which is an interferometric instrument likely to provide data not only at the nadir of the satellite but along a 200-km swath centered on this nadir (it uses the 10-day Jason orbit here), leads to similar performances as two nadir satellites in terms of sea level correction, but is better than 3 in terms of velocity correction. The correction of velocities indeed profits from the high spatial resolution of such instruments. Note however that the system is not fully controllable here, whatever observing system is considered, since bathymetry is not corrected in these experiments. In particular, as the bathymetric solutions are very influent on the calculation of model velocities, the potential correction of barotropic velocities is by construction naturally limited in this study. Finally, a 20 tide gauge network distributed along North Sea coast leads to very good global statistical performances. The reason is that they provide a very high temporal resolution, which is essential in our context of high-frequency barotropic dynamics. Concerning this network, two assimilation frequencies are considered (6 and 12 hours), as well as the combination with some future high-resolution altimeter systems. Such combinations lead to the best performances in our study. More details about these configurations and their performances are provided in Mourre et al. (2006b). 4) Conclusions 21,2 9,6 2 Jason scenarios. Blue bars concern sea level ensemble variance reduction, orange bars are relative to zonal velocity correction (the scores concerning meridional velocities are similar). 10 15 20 25 30 69,9 35 40 45 50 55 60 65 70 75 Figure 7. Mean space-time reductions (in %) of ensemble variances for different sea level observing Using an ensemble method, model error covariances due to uncertainties in bathymetry in a barotropic model submitted to meteorological forcing are demonstrated to be non-homogeneous, non-isotropic and non-stationary on the European shelf. These characteristics have to be carefully taken into account when dealing with data assimilation experiments over continental shelves. Moreover, this study shows that the spread of an ensemble with assimilation provides a robust diagnostic for the comparison of observational sampling strategies. The space-time mean reduction of ensemble variances leads to a global performance score for each observing system. The importance of the temporal resolution of sea level observing systems has in particular been highlighted in the context of our study. One recommendation would be to operate a combination of high-resolution altimeter systems with tide gauges to enable the best control of the model. Let´s finally notice that these results are relative to the high-frequency response of the ocean to meteorological forcing in the presence of bathymetric uncertainties on the North Sea shelf. The way they could be extended, or not, to other cases (other model, other region, other error source) is discussed in Mourre et al (2006b). Acknowledgements This work has been jointly supported by CNRS (Centre National de la Recherche Scientifique) and CNES (Centre National d'Etudes Spatiales). In memory of Christian Le Provost. References Auclair F., P. Marsaleix, and P. De Mey, 2003, Spacetime structure and dynamics of the forecast error in a coastal circulation model of the Gulf of Lions, Dyn. of Atm. and Oceans, 36, 309-346. Burgers G., P. J. Van Leeuwen, and G. Evensen, 1998, Analysis scheme in the ensemble Kalman Filter. Mon. Wea. Rev., 126, 1719-1724. Carrère L. and F. Lyard, 2003, Modeling the barotropic response of the global ocean to atmospheric wind and pressure forcing - comparisons with observations. Geophys. Res. Lett., 30(6):1275, doi:10.1029/2002GL016473. Chelton, D. B., editor, 2001, Report of the HighResolution Ocean Topography Science Working Group Meeting. Ref. 2001-4, Oregon State Univ., Corvallis, OR. Echevin V., P. De Mey and G. Evensen, 2000, Horizontal and vertical structure of the representer functions for sea surface measurements in a coastal circulation model. J.Phys.Oceanogr., 30:2627-2635. Evensen, G., 2003, The Ensemble Kalman Filter: Theoretical formulation and practical implementation, Ocean Dyn., 53, 343-367 Fu, L. L., editor, 2003, Wide-Swath Altimetric Measurement of Ocean Surface Topography, JPL Publication 03-002. Mourre B., P. De Mey, F. Lyard, and C. Le Provost, 2004, Assimilation of sea level data over continental shelves: an ensemble method for the exploration of model errors due to uncertainties in bathymetry, Dyn. of Atm. and Oceans, 38,93-121. Mourre B., L. Crosnier, and C. Le Provost, 2006a, Real-time sea level observations and operational oceanography, Accepted for publication in Phil. Trans. Roy. Soc. A Mourre B., P. De Mey, Y. Ménard, F. Lyard, and C. Le Provost, 2006b, Relative performances of future altimeter systems and tide gauges in controlling a model of North Sea high frequency barotropic dynamics, submitted to Ocean Dynamics. Robinson A. R., P. F. J. Lermusiaux and N. Quincy Sloan III, 1998, Data assimilation. In The Sea, Volume 10, The Global Coastal Ocean: Processes and Methods, K.H. Brink and A.R. Robinson, eds. Wiley, New York, Chap 20. Smith W.H.F. and D.T. Sandwell, 1997, Global seafloor topography from satellite altimetry and ship depth soundings. Science 277, 1957-1962. Verron J., P. Bahurel, and P. Vincent, 2001, AltiKa : étude de la circulation mésoéchelle par altimétrie en bande Ka sur micro-satellite. Research Proposal to Cnes. Vincent P., and E. Thouvenot, 2001, Status of Ka-band altimetry studies. In Report of the High-Resolution Ocean Topography Science Working Group Meeting., editor D.Chelton, Ref. 2001-4, pp 179-189, Oregon State Univ., Corvallis, OR