Appendix S3. Simulation landscapes and O-ring statistic The O
advertisement

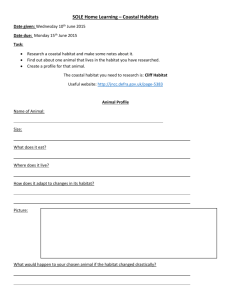
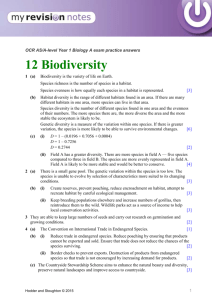
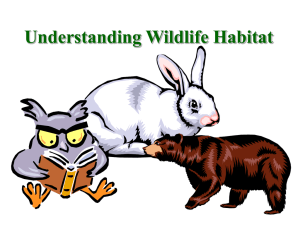
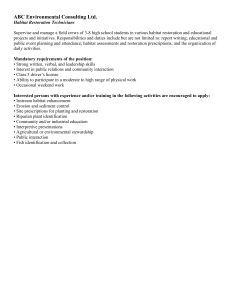
Appendix S3. Simulation landscapes and O-ring statistic The O-ring statistic, O11(r), represents the probability of finding a habitat cell (which has a value of 1) at distance r from another habitat cell (Wiegand et al. 1999). For all the landscape maps used in our simulations (see below), we calculated O11(r) by dividing the mean number of habitat cells within rings of radius r, centred at the n habitat cells in the landscape, by the mean number of cells in these rings, as follows: 1 n1 Po int sh Ri (r ) n1 i 1 O11 ( r ) 1 n1 Area h Ri (r ) n1 i 1 (1) where Ri(r) is a ring with radius r and width 1 centred in the ith habitat cell, the operator Pointsh[X] counts the number of habitat cells in a region X, and the operator Areah[X] determines the number of cells of the region X (Wiegand and Moloney 2004). The O-ring statistic O11(r) satisfies 0 < O11(r) < 1, and if habitat is randomly distributed O11(r) = p, where p is the proportion of habitat in the landscape. Habitat is clustered at scale r if O11(r) > p and repulsed if O11(r) < p. For computational issues the O-ring metric was calculated on a random sample of 10 % of the habitat. Calculation of the O-ring statistic showed that the degree of habitat clustering of the simulation landscape, as measured by the O11(r), decreased as the distance r increased (Figures S3.6, S3.12 and S3.18). However, this relationship depended on the landscape generator parameters. As the distance r increased, the O11(r) was lower when the amount of habitat was low than when it was high. Also, the effect of the amount of habitat on the O11(r) depended on the resolution at which habitat clustering occurred. For a ‘Blocky’ process, the effect of the amount of habitat on the O11(r) was stronger when habitat clustering occurred at 1 the coarse resolution (Figure S3.6C) than when it occurred at the fine resolution (Figure S3.6B). On the other hand, for a ‘Perforation’ process, the effect of the amount of habitat on the O11(r) was stronger when habitat clustering occurred at the fine resolution (Figure S3.18B) than when it occurred at the coarse resolution (Figure S3.18C). As the distance r increased, the O11(r) was lower when the degree of habitat clustering at the coarse and fine resolution was low than when it was high. Moreover, the effect of the degree of habitat clustering at one resolution on the O11(r) depended on the degree of habitat clustering at another resolution. For a ‘Mixed’ process, the effect of clustering at the fine resolution on the O11(r) was stronger when clustering at the coarse resolution was low (Figure S3.12A) than when clustering at the coarse resolution was high (Figure S3.12C). However, this interaction was stronger when the amount of habitat was low than it was high. The analysis of the simulation landscapes using the O-ring also revealed that the landscape generator parameters (p, a, D1 and D2) did not influenced the scale of habitat clustering, i.e. the distance at which the probability to find two habitat cells away from each other was larger than the probability for a random map. The point where the line representing the value of the O11(r) crossed the line for a random landscape, which is the value representing the scale at which clustering occurs (for different amount of habitat), is approximately the same in all the maps (Figures S3.6, S3.12 and S3.18). 2 Figure S3.1 Simulation maps showing landscapes subjected to a 'Blocky' process of habitat removal (a = 0.1), with different degrees of coarse- (D1) and fine-resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.05). 3 Figure S3.2. Simulation maps showing landscapes subjected to a 'Blocky' process of habitat removal (a = 0.1), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.1). 4 Figure S3.3. Simulation maps showing landscapes subjected to a 'Blocky' process of habitat removal (a = 0.1), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.2). 5 Figure S3.4. Simulation maps showing landscapes subjected to a 'Blocky' process of habitat removal (a = 0.1), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.3). 6 Figure S3.5. Simulation maps showing landscapes subjected to a 'Blocky' process of habitat removal (a = 0.1), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.4). 7 A B D2 = 2.1 0.8 0.0 0.2 0.4 0.6 0.8 0.6 0.4 0.2 0.0 0 O 11(r) D1 = 2.9 1.0 D2 = 2.9 1.0 D1 = 2.9 20 C 40 60 100 120 140 0 20 D 40 60 D1 = 2.1 80 100 120 140 120 140 D2 = 2.1 0.8 0.6 0.4 0.2 0.0 0.0 0.2 0.4 0.6 0.8 1.0 D2 = 2.9 1.0 D1 = 2.1 80 0 20 40 60 80 100 120 140 0 20 40 60 80 100 Spatial scale r (cells) Figure S3.6. Probability, O11(r), to find a habitat cell at distance r from another habitat cell for landscapes subjected to a 'Blocky' process of habitat removal (a = 0.1), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering and different amounts of habitat (p) (curves from top to bottom). The horizontal lines gives the corresponding reference value (O11 = p) for a random landscape. 8 Figure S3.7. Simulation maps showing landscapes subjected to a 'Mixed' process of habitat removal (a = 1), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.05). 9 Figure S3.8. Simulation maps showing landscapes subjected to a 'Mixed' process of habitat removal (a = 0.1), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.1). 10 Figure S3.9. Simulation maps showing landscapes subjected to a 'Mixed' process of habitat removal (a = 0.1), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.2). 11 Figure S3.10. Simulation maps showing landscapes subjected to a 'Mixed' process of habitat removal (a = 0.1), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.3). 12 Figure S3.11. Simulation maps showing landscapes subjected to a 'Mixed' process of habitat removal (a = 0.1), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.4). 13 A B D2 = 2.1 0.8 0.0 0.2 0.4 0.6 0.8 0.6 0.4 0.2 0.0 0 O 11(r) D1 = 2.9 1.0 D2 = 2.9 1.0 D1 = 2.9 20 C 40 60 100 120 140 0 20 D 40 60 D1 = 2.1 80 100 120 140 120 140 D2 = 2.1 0.8 0.6 0.4 0.2 0.0 0.0 0.2 0.4 0.6 0.8 1.0 D2 = 2.9 1.0 D1 = 2.1 80 0 20 40 60 80 100 120 140 0 20 40 60 80 100 Spatial scale r (cells) Figure S3.12. Probability, O11(r), to find a habitat cell at distance r from another habitat cell for landscapes subjected to a 'Mixed' process of habitat removal (a = 1), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering and different amounts of habitat (p) (curves from top to bottom). The horizontal lines gives the corresponding reference value (O11 = p) for a random landscape. 14 Figure S3.13. Simulation maps showing landscapes subjected to a 'Perforation' process of habitat removal (a = 20), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.05). 15 Figure S3.14. Simulation maps showing landscapes subjected to a 'Perforation' process of habitat removal (a = 20), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.1). 16 Figure S3.15. Simulation maps showing landscapes subjected to a 'Perforation' process of habitat removal (a = 20), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.2). 17 Figure S3.16. Simulation maps showing landscapes subjected to a 'Perforation' process of habitat removal (a = 20), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.3). 18 Figure S3.17. Simulation maps showing landscapes subjected to a 'Perforation' process of habitat removal (a = 20), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering, and a constant amount of habitat (p = 0.4). 19 A B D2 = 2.1 0.8 0.0 0.2 0.4 0.6 0.8 0.6 0.4 0.2 0.0 0 O 11(r) D1 = 2.9 1.0 D2 = 2.9 1.0 D1 = 2.9 20 C 40 60 100 120 140 0 20 D 40 60 D1 = 2.1 80 100 120 140 120 140 D2 = 2.1 0.8 0.6 0.4 0.2 0.0 0.0 0.2 0.4 0.6 0.8 1.0 D2 = 2.9 1.0 D1 = 2.1 80 0 20 40 60 80 100 120 140 0 20 40 60 80 100 Spatial scale r (cells) Figure S3.18. Probability, O11(r), to find a habitat cell at distance r from another habitat cell for landscapes subjected to a 'Perforation' process of habitat removal (a = 20), with different degrees of coarse- (D1) and fine- resolution (D2) habitat clustering and different amounts of habitat (p) (curves from top to bottom). The horizontal lines gives the corresponding reference value (O11 = p) for a random landscape. 20 References Wiegand T, Moloney KA (2004) Rings, circles, and null-models for point pattern analysis in ecology. Oikos 104:209-229 Wiegand T, Moloney KA, Naves J, Knauer F (1999) Finding the missing link between landscape structure and population dynamics: A spatially explicit perspective. Am Nat 154:605-627 21