smarsly2013b - Engineering Informatics Group
advertisement

A migration-based approach towards resource-efficient wireless
structural health monitoring
Kay Smarsly*, Kincho H. Law
Department of Civil and Environmental Engineering
Stanford University
Stanford, CA, USA
Abstract
Wireless sensor networks have emerged as a complementary technology to conventional,
cable-based systems for structural health monitoring. However, the wireless transmission of
sensor data and the on-board execution of engineering analyses directly on the sensor nodes
can consume a significant amount of the inherently restricted node resources. This paper
presents an agent migration approach towards resource-efficient wireless sensor networks.
Autonomous software agents, referred to as “on-board agents”, are embedded into the
wireless sensor nodes employed for structural health monitoring performing simple
resource-efficient routines to continuously analyze, aggregate, and communicate the sensor
data to a central server. Once potential anomalies are detected in the observed structural
system, the on-board agents autonomously request for specialized software programs
*
Corresponding author; Department of Civil and Environmental Engineering; Yang &
Yamazaki Environment & Energy Building (Y2E2); 473 Via Ortega, Room 279;
Stanford University; Stanford, CA 94305-4020; USA; phone: +1-650-283-5586;
email: smarsly@stanford.edu
1/46
(“migrating agents”) that physically migrate to the sensor nodes to analyze the suspected
anomaly on demand. In addition to the localized data analyses, a central information pool
available on the central server is accessible by the software agents (and by human users),
facilitating a distributed-cooperative assessment of the global condition of the monitored
structure. As a result of this study, a 95% reduction of memory utilization and a 96%
reduction of power consumption of the wireless sensor nodes have been achieved as
compared with traditional approaches.
Keywords
Structural Health Monitoring, Wireless Sensor Networks, Smart Structures, Distributed
Artificial Intelligence, Mobile Multi-Agent Systems, Dynamic Wireless Code Migration
1 Introduction
According to the American Society of Civil Engineers (ASCE), deficient and deteriorating
surface transportation infrastructure in the United States is expected to cost $912.0 billion
by 2020 and more than $2.9 trillion by 2040 [1]. As the Urban Land Institute (ULI) reveals
in its “Infrastructure 2012” report [2], the situation in other regions is similar, for example
in China and India – countries that are rapidly urbanizing – or in Europe, where
investments for infrastructure improvements of more than $2.6 trillion (€2.0 trillion) are
needed. Other infrastructure systems, such as dams, buildings or wind turbines, face similar
problems as they are subjected to ageing and other environmental factors. Therefore, future
2/46
generations of civil engineering structures, termed “smart structures”, are expected to be
instrumented with structural health monitoring (SHM) systems so that the structures are
capable of continuously monitoring and assessing their own structural conditions [3-5].
Structural health monitoring systems, consisting of sensors, data acquisition units,
computer systems and connecting cables, are designed to detect structural changes before
they reach critical states. By analyzing the sensor data recorded from the structures, SHM
systems provide the opportunities to enhance the safety and reliability of engineering
structures and to reduce the costs for management, maintenance and repair throughout the
structures’ life cycles [6]. However, in conventional SHM systems the installation of cables
can be expensive, time-consuming and labor-intensive, entailing high maintenance costs for
the SHM systems. Eliminating the need for connecting cables, wireless sensor networks
have emerged as a cost-effective and reliable alternative to conventional, cable-based SHM
systems [7-11]. Composed of numerous wirelessly connected sensor nodes, wireless sensor
networks are installed in the structure to automatically collect, analyze, aggregate and
communicate vast amounts of sensor data. The sensor nodes, integrating advanced
embedded systems technologies, are capable of self-interrogating collected sensor data for
signs of structural changes [12, 13]. In essence, the sensor data is first analyzed and
aggregated on the nodes, from high-bandwidth raw sensor data to low-bandwidth streams
of processed results. The analysis results are then transferred to centralized computer
systems, or to adjacent sensor nodes, for further processing.
3/46
By first analyzing the data sets locally and then communicating the results to the connected
computer systems, transmissions of large records of raw sensor data can be avoided. As a
result, the energy consumption for wireless data transmission is substantially reduced.
However, considerable computational power is needed for the local execution of complex
engineering analyses. Therefore, there have been active research efforts in the past several
years towards reducing the power consumption of wireless sensor nodes by optimizing the
sensor node hardware as well as the software embedded into the nodes. For example, new
software approaches, such as energy-efficient source coding and resource-efficient network
protocols, and new concepts on hardware circuitry and transmitter modules for improving
energy-consuming node components have been proposed [14-16].
Besides the resource consumption, a second major issue when deploying wireless sensor
networks for structural health monitoring is the isolated, limited view of a wireless sensor
node on a small area of the total structure. It is well known that changes in the global
structural response and behavior (such as altered stiffnesses and structural stability) should
also be considered in addition to the detection of local damages and deteriorations (e.g.
corrosion, cracks, etc.). Since the sensor data is usually collected at critical locations,
individual sensor information does not provide a global picture of the structural condition.
In summary, besides making the hardware and software more resource-efficient, holistic
(local/global) strategies are needed to assess local and global structural changes.
The goals of the research presented herein are twofold. First, the resource consumption of
the sensor nodes is to be reduced with respect to memory utilization and power
4/46
consumption. Second, a SHM system prototype, capable of holistically monitoring local as
well as global structural phenomena, is to be implemented. To achieve these goals, this
study integrates mobile multi-agent systems and dynamic wireless code migration into a
wireless sensor network. The paper begins with a background on mobile multi-agent
systems. Then, the migration-based monitoring concept is described in detail, and the
architecture and prototype implementation of the agent-based SHM system are shown.
Next, laboratory tests are presented validating the feasibility of the newly proposed concept
as well as the performance of the prototype system. The paper concludes with a discussion
of the test results and a comparison of the proposed migration-based concept with
conventional approaches currently used in structural health monitoring.
2 Background on mobile multi-agent systems
Multi-agent technology, originating from distributed artificial intelligence research, is a
rapidly developing research area that is of practical relevance since many years [17]. The
broad range of application domains of multi-agent systems includes, e.g., process control,
air traffic control, business process management, health care, water resource management,
traffic and transportation engineering, building control, power engineering applications, and
structural design [18-25]. More recently, multi-agent systems have also been applied in
different branches of structural health monitoring, such as monitoring of bridges, dams, and
wind turbines [26-29].
5/46
Although the term “agent” has often been misused as well as overused [30], one definition
has been widely accepted in the artificial intelligence community; the “weak notion of
agency”, proposed by Wooldridge and Jennings [31], defines an agent as a computer
program possessing four essential properties. An agent
operates without the direct intervention of humans and, unlike a common
software object, has control over its actions and internal states (“autonomy”),
interacts with other agents through agent communication languages (“social
ability”),
perceives its environment, e.g. the physical world or a software environment,
and responds in a timely fashion to environmental changes (“reactivity”) and
exhibits goal-directed behavior by taking initiatives (“pro-activeness”).
Multiple interacting software agents in association with the agent environment form a
multi-agent system. Due to the above mentioned agent properties, multi-agent systems are
characterized by a high degree of scalability, modularity, flexibility and extensibility, which
makes multi-agent technology a suitable basis for solving distributed engineering problems
as in structural health monitoring.
6/46
In the last decade, considerable success has been reported in porting multi-agent technology
on mobile devices such as cell phones, smart phones, or wireless sensor nodes (“mobile
multi-agent systems”) [32-34]. The distinctive strengths of multi-agent systems –
scalability, modularity, flexibility and extensibility – are utilized in mobile applications
facilitating distributed-cooperative problem solving in highly dynamic environments. To
adequately deal with the constraints associated with developing applications on small
devices, the majority of mobile devices supports some form of the Java programming
language [35]. Accordingly, most approaches towards mobile multi-agent systems are
based on Java, typically using the Connected Limited Device Configuration (CLDC) [36].
CLDC, a fundamental part of the “Java Platform, Micro Edition” (Java ME), defines the
most basic libraries and virtual machine features for resource-constrained devices. It is
worth mentioning that CLDC, although offering all major advantages provided by the Java
language such as object orientation, portability, robustness and security, in its current
version 1.1 requires only 160 kB of non-volatile memory to be allocated for the CLDC
libraries and for the Java virtual machine, and needs only 32 kB of volatile memory for the
virtual machine runtime [36]. As can be seen from Table 1, the total memory budget
needed by the CLDC specification, compared with the “Java Platform, Standard Edition”
(Java SE) for desktop and server environments, is as little as 0.07 % [37]
Table 1. Minimum system requirements of Java SE and Java ME.
Java Platform, Standard Edition
Java Platform, Mirco Edition
(Java SE 7)
(Java ME, CLDC 1.1)
Processor
266 MHz
16 MHz
Disk space
126 MB
32 kB
Memory
128
MB1
160 kB
7/46
1Windows
64-bit operating systems.
Several Java-based agent platforms for mobile devices, supporting the development of
mobile multi-agent systems, are currently available. Examples include DARPA
CougaarME [32], AFME [38], SPRINGS [39], 3APL-M [40], JADE-LEAP [41, 42], and
MAPS [43]. Agent platforms for mobile devices essentially provide lightweight subsets of
Java classes supporting basic agent services for communication, for multitasking, or – if
embedded into wireless sensor nodes – for accessing the node resources (e.g. sensors or
memory). Detailed reviews as well as comparisons of architectures, programming models
and performances of agent platforms for mobile devices can be found in [34, 44, 45].
It has been recognized in recent years that the performance and the dynamic behavior of
mobile multi-agent systems can further be enhanced by wireless code migration [46].
Having demonstrated high effectiveness in conventional wired decentralized systems, code
migration represents an emerging and powerful paradigm, which is already supported by
some state-of-the-art Java-based agent platforms [38, 43, 47]. Wireless code migration, i.e.
agents physically migrating from one mobile device to another including dynamic agent
behavior, actual state and specific knowledge, enables mobile multi-agent systems to
dynamically adapt to changes and altered conditions of their environment, resulting in a
substantial reduction of network load, latency, and resource consumption. While agent
migration in mobile multi-agent systems has already been developed and prototypically
implemented in related research areas [48], agent migration in wireless sensor networks
deployed for structural health monitoring has received little attention.
8/46
3 An agent-based structural health monitoring system
This section describes the basic concept, the architecture, and the prototype implementation
of an agent-based wireless SHM system. When developing the SHM system, two main
goals are pursued,
(i)
to reduce the resource consumption of the sensor nodes with respect to onboard memory utilization and wireless data communication, and
(ii)
to enhance the reliability of the SHM system enabling automated assessment
of both local and global conditions of the observed structural system.
These goals are to be achieved by integrating a mobile multi-agent system, allowing for
dynamic agent migration, into the wireless sensor nodes. In addition, a central information
pool is installed on the local computer. The information pool, facilitating a collaborative
assessment of the global structural condition, provides information on modal properties of
the structural system, information on sensor nodes installed, and a catalog of data analysis
algorithms. Last but not least, a monitoring database is deployed to persistently store the
sensor data that is continuously recorded from the structural system.
3.1 Architecture of the structural health monitoring system
9/46
As depicted in Fig. 1, the agent-based SHM system is composed of three basic components,
wireless sensor nodes, a base station, and the local computer. Each sensor node hosts a set
of mobile agents and forms a cluster together with other sensor nodes. A cluster is managed
by a head node, which performs administrative tasks, such as management of hardware and
network features, but does not collect or analyze sensor data. The base station, serving as an
interface between the wireless sensor nodes and the local computer, forwards sensor data
and information, assembled by the agents, from the wireless sensor nodes to the local
computer for persistent storage and further processing. Vice versa, commands sent from the
local computer are communicated via the base station to the wireless sensor nodes.
Furthermore, the local computer provides user interfaces, and external resources can be
connected to the wireless sensor network.
Fig. 1. Architecture of the agent-based wireless SHM system.
10/46
To reduce the quantities of communicated sensor data and to economically utilize the
restricted computing resources, two types of mobile agents, “on-board agents” and
“migrating agents”, are embedded into the nodes. Fig. 2 illustrates the dynamic interaction
of the agents involved and the proposed operational workflow. The on-board agents,
autonomously executing relatively simple yet resource-efficient algorithms at relatively low
sampling rates, are installed on the wireless sensor nodes to continuously collect, analyze,
aggregate and communicate the sensor data. If having detected (potential) anomalies on a
sensor node, the on-board agents proactively adapt their behavior to the new situation, e.g.
by modifying the sensor sampling rates. Thereupon, specific algorithms and further
knowledge, required for more comprehensive analyses of the sensor data, are requested by
the on-board agents from the head nodes of the SHM system; instead of heaving extensive
collections of engineering algorithms installed on every wireless sensor node a priori,
specialized migrating agents are requested on demand to physically migrate to the
respective sensor node. Automatically composed during runtime, the migrating agents are
assembled with the required algorithms and specific expert knowledge, which enables the
agents making appropriate decisions directly on a wireless sensor node.
11/46
Fig. 2. Proposed operational workflow in the agent-based SHM system.
3.2 Hardware of the wireless sensor network
For the prototype implementation of the wireless sensor network, Java-based Oracle
SunSPOT sensing units are deployed [49, 50]. The sensing units have already proven their
practicability and performance in a multitude of scientific projects [51-57]. As a distinct
advantage, unlike common embedded applications for wireless sensor networks that are
usually written in low-level native languages such as C/C++ and assembly language, the
sensing units comprise of a fully capable J2ME CLDC 1.1 Java virtual machine.
12/46
The computational core of the sensing units is an Atmel AT91RM9200 system on a chip
(SoC) incorporating a 32-bit ARM920T ARM processor with 16 kB instruction and 16 kB
data cache executing at 180 MHz maximum internal clock speed [58]. The SoC includes
several peripheral interface units such as USB host port, USB device port, Ethernet MAC,
programmable I/O controller, serial peripheral interface controller, I2C bus, etc. Memory of
the sensing units is a Spansion S71PL032J40 with 4 MB flash memory and 512 kB RAM.
For wireless communication, an integrated radio transceiver, the IEEE 802.15.4-compliant
Texas Instruments (Chipcon) CC2420 single-chip transceiver, is deployed, operating on the
2.4 GHz unregulated industrial, scientific and medical (ISM) band. Power supply is
provided by an internal, rechargeable lithium-ion battery (3.7 V, 720 mAh).
For acceleration measurements, a low-power three-axis linear accelerometer, type
LIS3L02AQ manufactured by STMicroelectronics, is integrated into the sensing units [59].
Consisting of a micro-electro-mechanical system (MEMS) sensor element, the
accelerometer measures a bandwidth of 4.0 kHz in x- and y-axis and 2.5 kHz in z-axis over
a scale of ± 6 g. It has a noise density of 50 μg/Hz1/2 enabling a resolution of 0.5 mg over
100 Hz. In addition to the three-axis accelerometer, the sensing units comprise of an
integrated temperature sensor operating from −40°C to 125°C, two momentary switches for
user interaction, 5 general purpose I/O pins, 4 high current output pins, and 6 analog inputs.
On the software side, a Squawk virtual machine, running without an underlying operating
system, ensures a lightweight execution of multiple embedded applications on the sensing
units [60]. Operating system functionalities are provided by the Squawk virtual machine,
13/46
which executes directly out of the flash memory. The Squawk virtual machine offers
features relevant to resource-efficient, agent-based SHM, such as garbage collector, thread
scheduler, and interrupt handler. By running without an underlying operating system,
memory of the sensing units is saved that would otherwise be consumed by the operating
system. As Squawk is mostly written in Java, additional memory savings arise because Java
byte code is a more efficient representation than its equivalent in machine code.
Furthermore, whereas most Java virtual machines run a single application, the Squawk
virtual machine can run multiple applications, each being represented as a Java object and
completely isolated from all other applications [61]. In total, a high degree of portability,
flexibility, extendibility and maintainability as well as an ease of debugging is achieved,
which makes Squawk a powerful basis for prototyping mobile multi-agent systems for
wireless structural health monitoring.
3.3 Prototype implementation of the structural health monitoring system
The mobile multi-agent system is implemented and embedded into the wireless sensor
nodes following the multi-agent architecture proposed by Smarsly et al. [62]. The
architecture, based on the MAPS platform [43], is characterized by components that
interact through events. As shown in Fig. 3, the main components include (i) the mobile
agents, (ii) the mobile agent execution engine for executing mobile agents and fulfilling
service requests issued by the agents, (iii) the resource manager for accessing sensor node
resources (e.g. sensors, actuators, battery, or flash memory), (iv) the timer manager for
timing agent actions, (v) the mobile agent naming for consistent naming of agents and
14/46
dynamic management of sensor nodes, (vi) the mobile agent communication channel for
inter-agent communication, and (vii) the mobile agent migration manager for executing the
migration of agents.
Fig. 3. Main components of the MAPS-based multi-agent architecture.
While the mobile agents, both on-board agents and migrating agents, are implemented as
components, the dynamic agent behaviors are modeled through multi-plane state machines
that consist of several functions, variables, and planes [64, 65]. One plane represents one
behavior of a mobile agent corresponding to the agent’s role in the mobile multi-agent
system. A fundamental part of a plane is an automaton that controls the dynamic agent
behavior using Event-Condition-Action (ECA) rules. ECA rules within the mobile multiagent system are represented by the triplet rMMAS = (E, C, A), where E is the event set, C is
the condition set and A are the atomic actions to be taken. An action of an ECA rule,
transferring the automaton in the next state, is triggered when the event is detected and the
condition is satisfied. In the implemented mobile multi-agent system, the events of an
15/46
agent, triggering actions of other agents, are delivered by the mobile agent execution engine
and communicated asynchronously between the agents using unicast or broadcast interagent communication.
Fig. 4 shows an abridged diagram of the main classes of the mobile multi-agent system,
illustrated using the Unified Modeling Language (UML). The class diagram will be used in
the following subsections to describe the prototype implementation of the on-board and the
migrating agents in more detail.
Fig. 4. Abridged UML class diagram of the mobile multi-agent system.
On-board agents
16/46
As shown in Fig. 4, two categories of on-board agents, the AdministratorAgent and the
TemperatureAnalysisAgent, are prototypically implemented into the wireless nodes. The
AdministratorAgent, running on every head and sensor node, is responsible for the
administration of a node; it manages, for example, hardware and network features and
provides information about memory usage, battery status, and radio configurations. The
TemperatureAnalysisAgent, prototypically embedded into the sensor nodes, is designed to
continuously collect and analyze temperature data from the observed structural system. Its
purpose is to detect anomalies, i.e. abnormal temperature changes, based on resourceefficient
embedded
algorithms.
For
continuous
temperature
interrogations,
the
TemperatureAnalysisAgent periodically senses temperature data by accessing the sensor
node’s temperature sensors and compares the recorded measurements with threshold
values. Threshold values as well as sensor sampling rates can be modified by the agent
itself or, through the local computer, by human individuals. In case of detected anomalies,
the TemperatureAnalysisAgent communicates the observed symptoms from the sensor
node to a head node and requests specialized migrating agents to investigate the observed
anomaly in detail. Simultaneously, the TemperatureAnalysisAgent increases the
temperature sampling rate. The dynamic agent behavior described is modularly
implemented in the TemperatureAnalysisCompositeBehavior class (Fig. 4) in terms of a
state machine, as illustrated in Fig. 5.
17/46
Fig. 5. Dynamic agent behavior implemented as ECA automaton.
Migrating agents
As described earlier, the migrating agents are capable of physically migrating on request of
the on-board agents from one node to another, including their dynamic behavior, actual
state, and specific knowledge. Upon arrival on a sensor node, the migrating agents apply
their inherent analysis capabilities to achieve new information about the structural
condition and send the analysis results to the connected local computer. On the local
computer, the information, together with further information received from other sensor
nodes, is assembled to provide a holistic picture about the current global condition of the
monitored structural system.
To implement the agent migration, the characteristics of the Squawk Java virtual machine
are advantageously utilized. Squawk employs an application isolation mechanism that
represents each application as an object being completely isolated from other objects.
Consequently, objects running on a wireless sensor node, such as migrating agents, can be
18/46
paused, serialized and – together with agent behaviors, agent states and required algorithms
– physically transferred to Squawk instances running on other nodes.
Assuming agent migration from a head node H (source node) to a regular sensor node S
(destination node), the destination node is contacted by the source node through a message.
Next, a socket is opened based on the radiostream protocol. The radiostream protocol,
which is a peer-to-peer protocol implemented on top of the MAC layer of the standard
IEEE 802.15.4, ensures a reliable, buffered and stream-based communication between S
and H. After having received the message from the source node H, the destination node S
sends an acknowledgement back to the node H, whereupon H establishes a radiostream
connection with node S. The migrating agent assembled on node H is paused, hibernated,
serialized into a byte array and sent in a message to the destination node S (including all
relevant data and execution state). After having received the message, the destination node
S deserializes, dehibernates and activates the migrating agent. Now operating on node S, the
migrating agent starts analyzing the local sensor data.
For the prototype implementation of the agent-based SHM system, the so called FFTAgent
is implemented; the FFTAgent is a migrating agent capable of analyzing modal properties
of structural systems based on fast Fourier transforms (FFT) that allow converting sensor
measurements from the time domain into the frequency domain [66]. Specifically, for
calculating the frequency response functions from time history data, the FFTAgent uses the
computationally efficient Cooley-Tukey FFT algorithm [67] upon migrating to sensor node
S. Thus, the FFTAgent is capable to compute the frequency response functions of the
19/46
structure as well as the primary modal frequencies at the given location, and it can compare
the actual frequencies to those of the healthy (i.e. undamaged) structure at the location of
sensor node S.
As shown in Fig. 4, the corresponding agent behavior is encoded in the class
FFTAgentBehavior, which aggregates the CooleyTukey class and is associated with the
FrequencyResponse class that handles the calculated frequency response functions. Upon
completion of the on-board analyses, the diagnostic results obtained by the FFTAgent are
sent to the local computer for further processing.
Monitoring database and information pool
Both the monitoring database and the information pool of the agent-based SHM system are
implemented using a relational MySQL database management system. The database
management system, installed on the local computer, is accessible by human users and by
the mobile agents. To enable human users online accessing the database management
system, the “phpMyAdmin” online tool, which allows remotely performing administrative
tasks such as creating, modifying or deleting data, is integrated into the SHM system.
Furthermore, to enable the mobile agents autonomously accessing the database
management system, the Java-based data access technology “JDBC” (Java Database
Connectivity) is utilized.
20/46
Technically, the monitoring database and the information pool in the current prototype are
implemented in one single database (Fig. 6). The sensor data recorded and pre-processed by
the mobile agents is handled and stored on the wireless sensor nodes in the form of Java
objects. The Java objects, after being transmitted from a wireless sensor node to the base
station, are converted into database tables, i.e. into relations, in which one single object,
such as a measurement, is represented as a tuple (a1, ..., an) being stored in a row of a
database table. The elements ai of a tuple represent the attributes of the object defining its
properties, such as time and value of a measurement. The basic structure of the monitoring
database and the information pool is illustrated in Fig. 6. Exemplarily, one database table of
the monitoring database (“t_a1”) and one database table of the information pool
(“topology”) are shown. While the first table contains sensor data recorded by a sensor
labeled “t_a1”, the second table specifies the system topology defining, for example, sensor
IDs, their locations within the monitored structural system, and the natural frequencies of
the undamaged structural system observed.
Fig. 6. Monitoring database and information pool.
21/46
As can be seen from Fig. 6, for every sensor of the SHM system one table is designated.
The reason for using one table for each sensor, as opposed to using one single table for
several sensors, is the autonomy of the wireless sensor network: Unlike conventional SHM
systems, in which centralized data acquisition units are deployed to collect sensor data from
different sensors in a synchronized fashion, the mobile agents of the wireless sensor
network collect and analyze the sensor data independently from each other (and, for
example, change the sensor sampling rates if required). Consequently, the measurements
are usually collected asynchronously at different timestamps, which makes the utilization of
different, independent database tables the most efficient alternative.
As an example, the following listing shows the modular implementation enabling the base
station to insert various measurements, received as Java objects from the mobile agents,
into the monitoring database.
1
public void insertMeasurement(String id, long timestamp, double value){
2
...
3
try{
4
Statement statement = connection.createStatement();
5
statement.executeUpdate("INSERT INTO `"+DATABASE+"`.`"+
id+"` (`"+TIMESTAMP+"`, `"+VALUE+"`)
VALUES ('"+timestamp+"', '"+value+"');");
6
}catch (SQLException sqlException){
7
...
8
11
}
}
22/46
In the example, the attributes “timestamp” and “value” of a received measurement are
stored as a tuple in a row of the database table, which is specified by the attribute “id”. Vice
versa, data stored in the monitoring database or in the information pool, if requested by the
mobile agents, is selected from the database in the same way, converted into Java objects,
and sent to the agents.
4 Laboratory tests
Laboratory tests are conducted serving as a proof of concept of the agent-based SHM
system. Corresponding to the main goals of this research, two major objectives are pursued
when conducting the laboratory tests. First, system performance data is collected for
evaluating the resource efficiency achieved by the SHM system. Second, the reliability of
the mobile multi-agent system embedded into the wireless sensor nodes is examined with
respect to detecting changes in the monitored structural system in a decentralizedcooperative fashion. A test set-up is devised as follows: An aluminum plate serving as a test
structure is exposed to heat that is to be detected by the on-board agents in real time. Heat
is induced, because the natural frequencies vary more with temperature than with other
damage. Furthermore, the temperature increases slowly by time, which can be
advantageously used to verify the capabilities of the mobile agents. The structural condition
of the test structure that may be changed due to the induced heat is to be assessed by
migrating agents, which are automatically assembled during runtime, based on acceleration
response data taken from the test structure.
23/46
4.1 Laboratory test setup
The test structure, a 900 mm × 540 mm aluminum plate (t = 0.635 mm) with one edge
being clamped, is instrumented with an array of 9 precision temperature sensors and 3
accelerometers. For the experimental test, the agent-based SHM system is composed of one
head node and three sensor nodes forming a cluster as well as a base station for connecting
the wireless sensor nodes to the local computer. As illustrated in Fig. 7, the test structure is
subdivided into three monitoring sections A, B, and C. The sensor nodes, labeled SA, SB and
SC, are installed on the fixed end, in the middle, and on the free end of the structure. Each
of the three sensor nodes is responsible for monitoring that section, in which it is installed.
Every sensor node hosts the previously introduced (and relatively simple) on-board agents,
namely the TemperatureAnalysisAgent and the AdministratorAgent. The head node hosts,
besides an AdministratorAgent, the prototypically implemented (and relatively complex)
migrating FFTAgent, such that the mobile multi-agent system, in total, is composed of the
agents that are situated on the sensor nodes and on the head node.
24/46
Fig. 7. Overview of the prototype SHM system
For the acceleration measurements, the integrated three-axis accelerometers of the sensor
nodes, labeled as aA, aB and aC in Fig. 7, are utilized. For the temperature measurements,
three external temperature sensors (tA,1, ..., tC,3) are attached to every sensor node through
the analog inputs. For that purpose, LM335A precision temperature sensors, manufactured
by National Semiconductor, are selected, which operate from −40°C to 100°C [68]. The
LM335A sensors have a linear output and produce an output voltage of about 3 V, which
makes the LM335A a perfect match for the sensor nodes, whose analog inputs are designed
to measure a voltage range between 0 V and 3 V. Fig. 8 shows the assembly of the wireless
sensor nodes and the external temperature sensor as well as the fully instrumented test
structure.
(a) Wireless sensor node and external
(b) SHM system mounted on the test structure.
temperature sensor.
Fig. 8. Installation of the agent-based SHM system for validation tests.
25/46
4.2 Autonomous monitoring based on agent migration
In the laboratory tests, the on-board agents operating on the sensor nodes are continuously
sensing temperature measurements using the externally attached temperature sensors. The
collected temperature measurements are locally analyzed based on simple threshold
computations, forwarded to the local computer, and stored in the monitoring database. As
depicted in Fig. 7, heat is introduced underneath the aluminum plate in monitoring section
B below temperature sensor tB,1. For the laboratory tests, a critical plate temperature
Tcrit = 60°C is pre-defined, indicating that an anomaly may occur and that further action
may be required by the SHM system. The value Tcrit, that is pre-defined based on the
physical limitations of the nodes, is given to the on-board agents. Fig. 9 shows the
temperature distribution at the time t = t(Tcrit) as calculated from the temperature
measurements collected by the on-board agents.
Fig. 9. Temperature distribution (°C) on the upper side of the test structure.
26/46
The monitoring procedure carried out in response to the detection of the abnormal increase
in temperature is shown in Fig. 10. As Tcrit is first exceeded in monitoring section B (Fig.
9), the on-board agents of sensor node SB notify the head node about the observed abnormal
situation. As soon as having received this information, on the head node a migrating agent
is individually composed and instantiated in order to analyze the current condition of the
test structure in more detail. First, the information pool installed on the local computer is
queried for appropriate actions to be undertaken. In this example, the Cooley-Tukey FFT
algorithm [67], and consequently the FFTAgent, is selected to analyze the structural
condition by determining the actual modal parameters of the test structure. Based on the
information provided by the information pool, modal properties of the undamaged test
structure, such as first modal frequencies, are passed to the FFTAgent on the head node.
Furthermore, details on the migration are specified; in this case, sensor node SC, instead of
sensor node SB where the anomaly has first been detected, is defined as the target node for
the agent migration. The reason is that sensor node SC along with its internal accelerometer
is installed at the free end of the aluminum test structure and can most likely generate more
sensitive results than SB when acquiring acceleration measurements for analyzing the modal
properties of the structure.
27/46
Fig. 10. Monitoring procedure automatically executed in consequence of the detected anomaly.
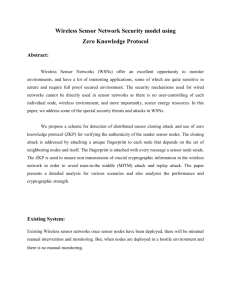
After having migrated to sensor node SC, the FFTAgent accesses the sensor node’s internal
accelerometer, senses acceleration measurements and computes the frequency response
function at location SC from the acceleration time history data. Using the calculated
frequency response function, the agent identifies the first modal frequency as 1.6 Hz, which
does not significantly differ from the first modal frequency of the undamaged structure. The
diagrams in Fig. 11 show the frequency response functions of the test structure before and
after exposing it to heat. It should be mentioned that the corresponding data sets used for
visualizing the diagrams have been transmitted solely for documentation purposes within
this study. The results of the on-board analyses are sent by the FFTAgent from sensor node
SC via the base station to the local computer, where they are stored in the form of a safety
report that is accessible by any responsible individuals (Fig. 12).
28/46
Fig. 11. Frequency response function for sensor location SC before (left) and after exposing the test structure to heat
(right).
Fig. 12. Example safety report generated on behalf of the migrating agent.
4.3 Experimental results
In the laboratory tests, performance data collected from the agent-based SHM system has
been compared to current approaches commonly implemented in wireless SHM systems. In
particular, the size of the transmitted data sets and the utilized internal node memory have
been recorded. As a result of the performance analyses, a total of 71 kB on-board memory
29/46
was needed for the migration-based monitoring procedure conducted in the laboratory tests,
including agent migration and on-board FFT analysis. More specifically, the objects
representing the acceleration measurements on the nodes, which are required for data
analysis, had a size of 0.02 kB (17 B) each, resulting in a total of 67.8 kB needed for the
on-board FFT analysis. 3.2 kB (3,276 B) were needed for all other objects that were
automatically created on a wireless sensor node within the migration-based monitoring
procedure (including migrating agent, agent behavior, and further agent attributes). As a
result, a reduction of wirelessly transmitted data of more than 95% was achieved as
compared with conventional approaches that send the collected sensor data, here 67.8 kB,
to a remote computer for centralized data analyses.
While the performance data on the memory consumption and on the data transmission
recorded in the laboratory tests is very accurate, the laboratory tests – even if conducted
several times – do not provide performance data on the power consumption reliable enough
to be representative; due to the limited quantities of performance data that can be collected
in the laboratory tests, the measurable power consumptions are too small to be captured
accurately. Therefore, performance tests on the power consumption were conducted in
addition to the laboratory tests simulating the migration-based data processing. The
performance tests on the power consumption included 100 migration procedures in order to
obtain sufficient performance data. In total, 3 tests were conducted, resulting in 300
migration procedures. Essentially, the performance tests were composed of a simulated
migration-based procedure (Fig. 10) and, for comparison, a conventional monitoring
procedure, in which all raw data was sent to a central server. As a result, the battery
30/46
capacity consumed in one migration-based procedure was on the average 0.14 mAh, as
opposed to 3.70 mAh consumed in the conventional case, which is a 96% reduction of
power consumption.
The reasons for the achieved resource efficiency are twofold: First, sensing and on-board
storage of unnecessary measurements as well as wireless transmissions of these data sets
are largely avoided. Second, on-board calculations are only executed by specialized
migrating agents if anomalies are suspected. As described earlier, both the collected
measurements and the migrating agents are technically realized as Java objects. These
objects are not a priori initialized on a wireless sensor node. Rather, the initialization of
individual objects is performed on the head nodes – only if necessary – using the central
information pool. As a result, no on-board memory is allocated for the objects unless a
migrating agent has been sent from a head node to the respective sensor node. Furthermore,
all objects related to the migration-based monitoring procedure, if no longer needed, are
automatically marked and swept by the garbage collector of the embedded virtual
machines.
Last but not least, the central information pool installed on the local computer incorporates
global information on the observed structure and a catalog of engineering algorithms
suitable for efficiently analyzing suspected anomalies. As has been demonstrated in the
laboratory tests, it was possible to achieve a holistic picture during runtime, which would
not be possible without dynamic agent migration using static objects and algorithms that
are stored on each wireless sensor node a priori.
31/46
5 Summary and conclusions
In this paper, the design and implementation of an agent-based wireless structural health
monitoring system, comprising of a wireless sensor network and software programs
running on a connected computer, have been presented. To achieve resource efficiency and
reliability of the agent-based SHM system, a mobile multi-agent system composed of
several autonomous software entities, referred to as “mobile agents”, has been embedded
into the wireless sensor network. Whereas some mobile agents (“on-board agents”)
permanently reside on the wireless sensor nodes for continuous, autonomous monitoring,
other mobile agents (“migrating agents”) physically migrate from one sensor node to
another on demand. Instead of having extensive collections of engineering algorithms
installed on every sensor node a priori, the specialized migrating agents are requested in
real time if anomalies of the monitored structural system are suspected. Without the need
for transmitting large amounts of sensor data, the migrating agents – assembled during
runtime and provided with specific expert knowledge – execute individual engineering
algorithms directly on the sensor nodes analyzing the local sensor data according to the
suspected anomaly.
For the proof of concept of the proposed approach, laboratory tests have been conducted (i)
to collect system performance data for evaluating the resource efficiency achieved by the
prototype SHM system and (ii) to examine the reliability of the mobile multi-agent system
embedded into the wireless sensor nodes. In the laboratory tests, the agent-based SHM
32/46
system has been installed on an aluminum plate serving as a test structure. Because natural
frequencies vary more with temperature than with damage, heat has been induced into the
test structure to evaluate the dynamic, cooperative behavior of the mobile agents. As a
result, the changes in temperature, slowly increasing over time, have been detected by the
mobile agents. Furthermore, the condition of the test structure has autonomously been
assessed by migrating agents based on modal analyses of acceleration response data
recorded from the structure on demand.
In summary, the resource consumption of the wireless sensor nodes, compared with
traditional approaches commonly implemented in wireless SHM systems, could
significantly be reduced. The wirelessly transmitted data and the power consumption have
been reduced by 95% and by 96%, respectively, as compared with transmitting all raw
sensor data to a remote computer for central data analysis. At the same time, as compared
with conventional approaches hosting data analysis algorithms directly on board, the
accuracy and the reliability of monitoring could be increased, because the agent-based
condition assessment is performed in a distributed-cooperative fashion incorporating global
properties of the observed structural system taken from the information pool. Therefore,
with respect to scaling up from the laboratory tests to relatively complex real-world SHM
problems, the efficiency of the proposed approach could likely increase with increasing
complexity of the SHM system, the observed structure, and the collection of data analysis
and structural monitoring algorithms.
Acknowledgments
33/46
This research is partially funded by the German Research Foundation (DFG) under grant
SM 281/1-1 and under grant SM 281/2-1, awarded to Dr. Kay Smarsly. The research is also
partially supported by the U.S. National Science Foundation under grant CMMI-0824977,
awarded to Professor Kincho H. Law. Any opinions expressed in this paper are those of the
authors and do not necessarily reflect the opinions of the German Research Foundation and
the National Science Foundation.
References
1
American Society of Civil Engineers. Failure to Act: The Economic Impact of
Current Investment Trends in Surface Transportation Infrastructure. Report. Reston,
VA, USA: American Society of Civil Engineers; 2011.
2
Urban Land Institute and Ernst & Young. Infrastructure 2012: Spotlight on
Leadership. Report. Washington, DC, USA: Urban Land Institute; 2012.
3
Ni YQ, Li B, Lam KH, Zhu DP, Wang Y, Lynch JP, et al. In-construction vibration
monitoring of a supertall structure using a long-range wireless sensing system.
Smart Struct Syst 2011; 7:83-19.
4
Chong KP, Carino NJ, Washer G. Health monitoring of civil infrastructures, Smart
Mater Struct 2003; 12:483-11.
34/46
5
Farrar CR, Sohn H, Hemez FM, Anderson MC, Bement MT, Cornwell PJ, et al.
Damage Prognosis: Current Status and Future Needs. Report. Los Alamos, NM,
USA: Los Alamos National Laboratory; 2003.
6
Smarsly K, Law KH, Hartmann D. Towards Life-Cycle Management of Wind
Turbines based on Structural Health Monitoring. In: Proceedings of the First
International Conference on Performance-Based Life-Cycle Structural Engineering.
Hong Kong, China; 2012. pp. 1066-9.
7
Lynch JP, Law KH., Kiremidjian AS, Carryer E, Farrar CR, Sohn H, et al. Design
and performance validation of a wireless sensing unit for structural monitoring
applications, Struct Eng Mech 2004; 17:393-16.
8
Spencer BF, Ruiz-Sandoval ME, Kurata N. Smart sensing technology: opportunities
and challenges, Struct Control Hlth 2004; 11:349-20.
9
Zimmerman AT, Shiraishi M, Swartz RA, Lynch JP. Automated modal parameter
estimation by parallel processing within wireless monitoring systems. J Infrastruct
Syst 2008; 14:102-12.
35/46
10
Rice JA, Mechitov K, Sim SH, Nagayama T, Jang S, Kim R, et al. Flexible smart
sensor framework for autonomous structural health monitoring. Smart Struct Syst
2010; 6:423-16.
11
Kim J, Swartz RA, Lynch JP, Lee JJ, Lee CG. Rapid-to-deploy reconfigurable
wireless structural monitoring systems using extended-range wireless sensors.
Smart Struct Syst 2010; 6:505-20.
12
Lynch JP, Loh K. A Summary Review of Wireless Sensors and Sensor Networks
for Structural Health Monitoring. Shock Vib 2006; 38:91-38.
13
Wang Y, Swartz RA, Lynch JP, Law KH, Lu KC, Loh CH. Decentralized civil
structural control using real-time wireless sensing and embedded computing. Smart
Struct Syst 2007; 3:321-20.
14
Tang Q, Yang L, Giannakis GB, Qin, T. Battery Power Efficiency of PPM and FSK
in Wireless Sensor Networks. IEEE T Wirel Commun 2007; 6:1308-11.
15
Prakash Y, Gupta SKS. Energy Efficient Source Coding and Modulation for
Wireless Applications. In: Proceedings of the Wireless Communications and
Networking Conference. New Orleans, LA, USA; 2003. pp. 212-6.
36/46
16
Laneman JN, Tse DNC, Wornell GW. Cooperative Diversity in Wireless Networks:
Efficient Protocols and Outage Behavior. IEEE T Inform Theory 2004; 50:3062-19.
17
Nwana HS, Ndumu DT. A brief introduction to software agent technology. In:
Jennings NR, Wooldridge MJ, editors. Agent Technology – Foundations,
Applications, and Markets, Berlin, Germany: Springer; 1998, p. 29-19.
18
Jennings NR, Wooldridge MJ. Applications of Intelligent Agents. In: Jennings NR,
Wooldridge MJ, editors. Agent Technology – Foundations, Applications, and
Markets, Berlin, Germany: Springer; 1998, p. 3-26
19
Fuhrmann T, Neuhofer B. Multi-agent systems for environmental control and
intelligent buildings. Report. Salzburg, Austria: Department of Computer Science,
University of Salzburg; 2006.
20
Gunkel A. The application of multi-agent systems for water resources research –
Possibilities and limits. Diploma Thesis. Freiburg, Germany: Institut für Hydrologie
der Albert-Ludwigs-Universität Freiburg i. Br.; 2005.
21
Klügl F, Bazzan ALC. Multi-Agent Systems for Traffic and Transportation
Engineering. 1st ed. Hershey, PA, USA: Information Science Reference; 2009.
37/46
22
Qiao B, Liu K, Guy C. A multi-agent system for building control. In: Proceedings
of the IEEE/WIC/ACM International Conference on Intelligent Agent Technology.
Hong Kong, China; 2006. pp. 653-7.
23
McArthur SDJ, Davidson EM, Catterson VM, Dimeas AL, Hatziargyriou ND,
Ponci F, et al. Multi-Agent Systems for Power Engineering Applications—Part I:
Concepts, Approaches, and Technical Challenges. IEEE T Power Syst 2007;
22:1743-10.
24
McArthur SDJ, Davidson EM, Catterson VM, Dimeas AL, Hatziargyriou ND,
Ponci F, et al. Multi-Agent Systems for Power Engineering Applications—Part II:
Technologies, Standards, and Tools for Building Multi-agent Systems, IEEE T
Power Syst 2007; 22:1753-7.
25
Bilek J, Mittrup I, Smarsly K, Hartmann D. Agent-based Concepts for the Holistic
Modeling of Concurrent Processes in Structural Engineering. In: Proceedings of the
10th ISPE International Conference on Concurrent Engineering. Madeira, Portugal;
2003. pp. 47-7.
26
Smarsly K, Lehner K, Hartmann D. Structural Health Monitoring based on
Artificial Intelligence Techniques. In: Proceedings of the International Workshop on
Computing in Civil Engineering. Pittsburgh, PA, USA; 2007. pp. 111-8.
38/46
27
Mittrup I, Smarsly K, Hartmann D, Bettzieche V. An Agent-based Approach to
Dam Monitoring. In: Proceedingy of the 20th CIB W78 Conference on Information
Technology in Construction. Auckland, New Zealand; 2003. pp. 239-8.
28
Smarsly K, Law KH, Hartmann D. Multiagent-Based Collaborative Framework for
a Self-Managing Structural Health Monitoring System. J Comput Civil Eng 2012;
26:76-15.
29
Smarsly K, Law KH, Hartmann D. Implementing a Multiagent-Based SelfManaging Structural Health Monitoring System on a Wind Turbine. In: Proceedings
of the 2011 NSF Engineering Research and Innovation Conference. Atlanta, GA,
USA; 2011. Digital proceedings.
30
Nwana HS. Software agents: An overview. Knowl Eng Rev 1996; 11:1-41.
31
Wooldridge MJ, Jennings NR. Intelligent agents: Theory and practice. Knowl Eng
Rev 1995; 10:115-38.
32
Wright W, Moore D. Design considerations for multiagent systems on very small
platforms. In: Proceedings of the Second International Joint Conference on
Autonomous Agents and Multi-Agent Systems. Melbourne, Australia; 2003. pp.
1160-2.
39/46
33
Cao J, Tse DCK, Chan ATS. PDAgent: A Platform for Developing and Deploying
Mobile Agent-enabled Applications for Wireless Devices. In: Proceedings of the
2004 International Conference on Parallel Processing. Montreal, Canada; 2004. pp.
510-8.
34
Shepherdson J, Lee H, Mihailescu P. Multi-agent Systems as a Middleware to
Automate Mobile Business Processes: State of the Art. In: Proceedings of the 5th
International Conference on Applied Informatics and Communications. Malta;
2007. pp. 187-5.
35
O’Hare GMP, O’Grady MJ, Muldoon C, Bradley JF. Embedded Agents: A
Paradigm for Mobile Services. Int J Web and Grid Services 2006; 2:379-27.
36
Sun Microsystems, Inc. JSR-000139 Connected Limited Device Configuration,
Specification Version 1.1.1, Java Platform, Micro Edition (Java ME). Specification.
Santa Clara, CA, USA: Sun Microsystems, Inc.; 2007.
37
Oracle Corporation. Java SE Documentation - Windows System Requirements for
JDK and JRE. [online] Redwood Shores, CA, USA: Oracle Corporation; 2013.
Available
at:
<http://docs.oracle.com/javase/7/docs/webnotes/install/windows/-
windows-system-requirements.html> [Accessed January 1, 2013].
40/46
38
Muldoon C, O’Hare GMP, Collier RW, O’Grady MJ. Agent Factory Micro Edition:
A Framework for Ambient Applications. In: Proceedings of The Intelligent Agents
in Computing Systems Workshop. Reading, UK; 2006. pp. 727-8.
39
Illari S, Trillo R, Mena E. SPRINGS: A Scalable Platform for Highly Mobile
Agents in Distributed Computing Environments. In: Proceedings of the 2006
International Symposium on a World of Wireless, Mobile and Multimedia
Networks. Buffalo, NY, USA; 2006. pp. 633-5.
40
Koch F. 3APLM Platform for Deliberative Agents in Mobile Devices. In:
Proceedings of the International Joint Conference on Autonomous Agents and
Multiagent Systems. Utrecht, The Netherlands; 2005. pp. 153-2.
41
Caire G., Pieri, F. LEAP User Guide. LEAP 4.1.1. Torino, Italy: Telecom Italia
S.p.A.; 2011.
42
Bellifemine F, Caire G, Trucco T, Rimassa G. JADE Programmer’s Guide. Torino,
Italy: Telecom Italia S.p.A.; 2010.
43
Aiello F, Fortino G, Gravina R, Guerrieri A. A Java-Based Agent Platform for
Programming Wireless Sensor Networks. Comput J 2011; 54:439-16.
41/46
44
Urra O, Ilarri S, Trillo R, Mena E. Mobile Agents and Mobile Devices: Friendship
or Difficult Relationship? J Phys Agents 2009; 3:27-11.
45
Aiello F, Carbone A, Fortino G, Galzarano S. Java-based Mobile Agent Platforms
for Wireless Sensor Networks. In: Proceedings of the International Multiconference
on Computer Science and Information Technology. Wisla, Poland; 2010. pp. 165-8.
46
Cucurull J, Overeinder BJ, Oey MA, Borrell J, Brazier FMT. Abstract software
migration architecture towards agent middleware interoperability. In: Proceedings
of the International Multiconference on Computer Science and Information
Technology. Wisla, Poland; 2007. pp. 27-11.
47
Warnier M, Oey MA, Timmer RJ, Overeinder BJ, Brazier FMT. Enforcing Integrity
of Agent Migration Paths by Distribution of Trust. Int J of Intelligent Information
and Database Systems 2009; 3:382-15.
48
Herbert J, O’Donoghue J, Ling G, Fei K, Fok CL. Mobile Agent Architecture
Integration for a Wireless Sensor Medical Application. In: Proceedings of the 2006
IEEE/WIC/ACM International Conference on Web Intelligence and Intelligent
Agent Technology. Hong Kong, China; 2006. pp. 235-4.
49
Sun Microsystems, Inc. Sun Small Programmable Object Technology (Sun SPOT).
Developer’s Guide. Santa Clara, CA, USA: Sun Microsystems, Inc.; 2009.
42/46
50
Sun Microsystems, Inc. Sun SPOT Owner’s Manual. Owner’s Manual. Santa Clara,
CA, USA: Sun Microsystems, Inc.; 2009.
51
Gupta V. Experiments with a Solar-powered Sun SPOT. Technical Report. Menlo
Park, CA, USA: Sun Microsystems Laboratories; 2009.
52
Bortenschlager M, Haid, E, Wagner A. Rapid Prototyping of Sensor-Based
Applications with SunSPOTs. ERCIM News 2009; 76:36-2.
53
Smarsly K, Law KH, König M. Resource-Efficient Wireless Monitoring based on
Mobile Agent Migration. In: Proceedings of the SPIE (Vol. 7984): Health
Monitoring of Structural and Biological Systems. San Diego, CA, USA; 2011. pp.
26-12.
54
Mahadeokar J. Java Sun SPOTS in the Rain Forests of India. [online] Cary, NC,
USA: DZone, Inc. Available at: <http://www.dzone.com/links/java_sun_spots_in_the_rain_forests_of_india.html> [Accessed January 3, 2013].
55
Smarsly K., Georgieva K., König M, Law KH. Monitoring of Slope Movements
coupling Autonomous Wireless Sensor Networks and Web Services. In:
Proceedings of the First International Conference on Performance-Based Life-Cycle
Structural Engineering. Hong Kong, China; 2012. pp. 1096-7.
43/46
56
Georgieva K, Smarsly K, König M, Law KH. An Autonomous Landslide
Monitoring System based on Wireless Sensor Networks. In: Proceedings of the
2012 ASCE International Conference on Computing in Civil Engineering.
Clearwater Beach, FL, USA; 2012. pp. 145-8.
57
Alarcon-Ramirez A, Martinez-Pabon M, Kim C. Design and Prototype of a
Wireless Tailgate Detection System Using Sun Spot Platform. Int J Embedded
Systems and Applications 2011; 1:1-14.
58
Sun Microsystems, Inc. SunSPOT Theory of Operation. Specification. Santa Clara,
CA, USA: Sun Microsystems, Inc.; 2009.
59
STMicroelectronics.
LIS3L02AQ.
Datasheet.
Geneva,
Switzerland:
STMicroelectronics N.V.; 2004.
60
Simon D, Cifuentes C, Cleal D, Daniels J, White D. Java on the bare metal of
wireless sensor devices: the Squawk Java virtual machine. In: Proceedings of the
2nd international conference on Virtual execution environments. Ottawa, Canada;
2006. pp. 78-11.
44/46
61
Simon D, Cifuentes C. The Squawk virtual machine: Java on the bare metal. In:
Proceedings of the 20th Conference on Object-Oriented Programming, Systems,
Languages, and Applications. San Diego, CA, USA; 2005. pp. 150-2.
62
Smarsly K, Law KH, König M. Autonomous Structural Condition Monitoring based
on Dynamic Code Migration and Cooperative Information Processing in Wireless
Sensor Networks. In: Proceedings of the 8th International Workshop on Structural
Health Monitoring. Stanford, CA, USA; 2011. pp. 1996-8.
63
Aiello F, Carbone A, Fortino G, Galzarano S. Java-based Mobile Agent Platforms
for Wireless Sensor Networks. In: Proceedings of the International Multiconference
on Computer Science and Information Technology. Wisla, Poland; 2010. pp. 165-8.
64
Bölöni L, Marinescu DC. A Multi-Plane State Machine Agent Model. Technical
Report. West Lafayette, IN, USA: Purdue University; 1999.
65
Bölöni L, Marinescu DC. A Multi-Plane State Machine Agent Model. In:
Proceedings of Fourth International Conference on Autonomous Agents. Barcelona,
Spain; 2000. pp. 80-1.
66
Press, WH, Teukolsky, SA, Vetterling, WT. Numerical Recipes in C: The Art of
Scientific Computing. Second edition. Cambridge, UK: Cambridge University
Press, 2002.
45/46
67
Cooley JW, Tukey JW. An Algorithm for the Machine Calculation of Complex
Fourier Series. Math Comput 1965; 19:297-5.
68
National Semiconductor Corporation. LM135/LM235/LM335, LM135A/LM235A/LM335A Precision Temperature Sensors. Datasheet. Santa Clara, CA, USA:
National Semiconductor Corporation; 1999.
46/46