Vibration Response of a Stiffened Plate Using Shell and Solid Finite

RENSSELAER POLYTECHNIC INSTITUTE
Vibration Response of a Stiffened Plate
Using Shell and Solid Finite Element
Modeling Techniques
Master’s Final Project Proposal
Kirsten Benamati
6/27/2014
In completion of a Master’s of Mechanical Engineering study, this paper proposes as a final project to investigate the vibration response of a stiffened plate using shell and solid finite element modeling techniques. Finite element results from 1 to 1000 Hz for each model will be compared using wavenumber analysis. A spatial Fourier transform on the surface velocity along several points on the plate will be used to evaluate the wavenumber results. The three model results will be compared to evaluate any differences found in the three techniques.
1 Introduction/Background
Finite element analysis (FEA) is used to evaluate the vibration response of stiffened plates in a variety of applications, such as marine structures or buildings (Reference 1). A finite element model can be analyzed throughout the frequency range of interest to determine the vibration response due to the various dynamic load conditions. As the problems become more complex and as the frequency range of interest becomes higher, the models become large and computationally intensive. To simplify complex models, various assumptions are made about the type and number of elements needed to capture the dynamic vibrational response correctly.
These assumptions can reduce the number of equations in the solution, but care must be taken to evaluate that the assumptions are appropriate to ensure an accurate solution.
In general, a stiffened plate can be modeled with shell elements for the plating and beam elements for the stiffeners or entirely with shell elements using plate theory (Reference 2, p. 530-
531). At low frequencies when the wavelengths are long, the bending behavior is dominant, and plate theory is appropriate to capture the effects adequately of the plate. Modeling the stiffeners as beam elements accurately captures the bending behavior since beam elements are based on exact bending solutions (Reference 2). As the frequency increases, plate modes of vibration can be excited within stiffeners, with the first fundamental mode occurring at the frequency when a half wavelength forms along the depth of the stiffener. This effect cannot be captured using beam elements based on beam bending equations only, so stiffeners must be modeled as shell elements. At even higher frequencies, full wavelengths can form within small structural features, such as compression or shear waves through the thickness of a plate, or a bending wave along the depth of a beam flange. Solid elements based on three-dimensional elasticity theory are needed to model the vibrations in this case. Although solid elements can capture the through thickness effects at higher frequencies, solid element models will have many more degrees of freedom and be more computationally intensive to solve than plate and beam models.
2 Problem Description
This project seeks to evaluate the vibration response of a stiffened plate using several finite element modeling techniques. The purpose is to determine the appropriate model fidelity versus frequency of various finite element types for beams, shells, and solids for capturing the dynamic response as frequency increases. The results will be used to establish guidelines on the appropriate modeling technique for a stiffened plate to capture the dynamics of the structure accurately for a given frequency range. Although a case involving beam elements for stiffening will be modeled, the focus will be on modeling with shell and solid elements, since these element types are more suited for high frequency analysis. This project will not investigate in depth the particular element formulations that might cause discrepancies between shell and solid element model results, since this depends on the specific and sometimes proprietary element formulations used in the solver code.
3 Methodology/Approach
Three finite element models of a stiffened plate will be created and evaluated for this project.
The results will be compared in wavenumber space to look for possible solution differences that may not be apparent in the spatial response. This section gives further details about the approach proposed.
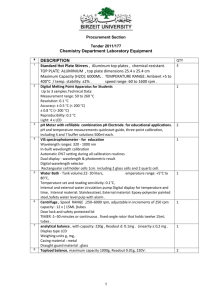
The geometry will consist of a 1in. thick steel plate, 100in. by 100in., which is reinforced with rectangular stiffeners at regular intervals across the length of the plate. A welded (fully coupled) connection of the stiffeners to the base plate is assumed. Figure 1 shows the basic setup of the geometry .
Figure 1 Plate with Rectangular Stiffeners
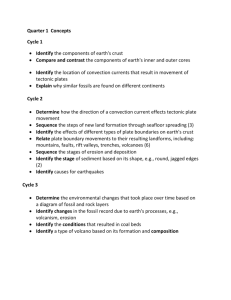
Each of the five stiffeners is 0.5in. thick and 5in. long. Figure 2 shows the spacing dimensions of the stiffeners across the plate.
Figure 2 Spacing Dimensions of Stiffeners
Three modeling cases will be created to represent this geometry. The FEA software
Abaqus/CAE will be used to create the three modeling cases listed below:
1.
Beam element stiffening on shell element plating – Stiffeners will be created using twonoded beam elements. The steel plating will be modeled with four-noded shell elements.
2.
Shell element stiffening on shell element plating – Both the plating and the stiffeners are created using shell elements.
3.
Full solid element model – Both the plating and stiffeners are modeled using solid elements. Two sub-cases will be analyzed for this model. The first sub-case will use first-order reduced integration elements. The reduced integration mitigates shear locking in the structure (Reference 3). At least four layers of elements will be modeled through the geometric thickness to capture cross-sectional deformation effects in the plate and the stiffening and to reduce hourglass effects (Reference 3). The second sub-case will use first-order full integration elements with incompatible modes. The incompatible modes formulation mitigates the shear locking effects while not introducing hourglass effects.
The mesh refinement will be set based on the wavelength of vibration in the structures being modeled, so that sufficient elements exist to capture the dynamic response throughout the frequency range. The wavelength calculation, based on the shortest wavelengths being analyzed
(those at the maximum analysis frequency) are based on an infinite unstiffened plate. This is a conservative assumption that ensures a fine mesh resolution, because wavelengths increase in a plate as stiffening is added. The maximum frequency evaluated in this project will be 1000 Hz.
The beam elements in case 1 will have the same maximum element length as the shell elements in cases 1 and 2. The maximum shell element length is calculated using the following equations for the flexural wavelength (Reference 4).
Equation 1
𝐷 =
𝐸ℎ 3
12(1 − 𝜐 2 )
Equation 2 𝑘 𝑓
= ( 𝜌 𝑠 ℎ𝜔 2
𝐷
)
1
4
Equation 3 𝜆 =
2𝜋 𝑘 𝑓
Equation 1 is the bending stiffness using the steel modulus of elasticity ( E ) and Poisson’s ratio
(
ν
) as well as the thickness of the plate or stiffener ( h ). The flexural wavenumber is calculated using Equation 2, the mass density (
ρ s
), and the radial frequency (
ω = 2πf
). Finally, Equation 3 calculates the flexural wavelength. The maximum shell element length is computed using 12 elements per flexural wavelength, which is assumed sufficient to capture wave dynamics. There does not seem to be an industry standard for mesh resolution, but many of the papers looked at accept 8 to 12 elements per wavelength. The Abaqus 6.13 User Reference Manual (Reference 5) uses 12 elements per wavelength in their figures as an example of an acceptably refined mesh.
The maximum solid element length must meet both the flexural wavelength and the compressional wavelength requirements. The compressional wavelength is calculated using the following equations (Reference 4).
Equation 4 𝑐 𝑝
𝐸
= (
(1 − 𝜐 2 )𝜌 𝑠
1
)
2
Equation 5 𝑘 𝑝
= 𝜔 𝑐 𝑝
Equation 6 𝜆 =
2𝜋 𝑘 𝑝
Equation 4 is the compressional wave velocity. Equation 5 calculates the compressional wavenumber which is used in Equation 6 to calculate the compressional wavelength. The maximum compression length for elements is computed assuming 12 elements per wavelength.
Each model will be analyzed from 0 to 1000 Hz for a dynamic forced vibrational excitation
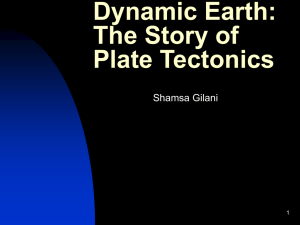
(drive) located on the steel plate. The complex displacement along the plate will be saved for two lines of response locations as shown in Figure 2. The plate will be analyzed with boundary conditions for a simply-supported plate.
Figure 3 Response Lines along Example Plate
The first step in the comparison of the results will plot the displacement response along the plate versus the frequency to gain an overview of any differences due to the modeling techniques.
Next, a spatial Fourier transform will convert the surface velocity on the plate to wavenumber space (Reference 4). The wavenumber response versus frequency will be plotted and compared between the three modeling cases. Using wavenumbers should reveal the underlying response features in the steel plate, thus helping to highlight the differences that might occur due to the modeling techniques and to perhaps give some indication of the reason behind those differences.
Finally, if any differences are identified, one instance of such a difference will be explored by comparing assumptions made by shell elements to what can be captured using brick elements.
4 Resources Required
The finite element software Abaqus/CAE will be used to create the models. A version capable of supporting the nodal load (greater than 1000 nodes) will be required. In addition, the
MathWorks developed computing environment, MATLAB, will be used to for comparisons as well as the spatial Fourier transform analysis codes used in converting the structural response to wavenumber space.
5 Expected Outcomes
Comparison between the three modeled cases is expected to show whether or not there are solution differences between modeling methods for stiffened plates at different frequencies, particularly between shell and solid elements. Reasons for any differences found may be given if readily observable; otherwise, an in-depth analysis of differences goes beyond the scope of this project as it would require detailed analysis of the element formulations used by the solver code.
The results should help provide a potential frequency limit for each modeling technique.
6 Milestone/Deadline List
The expected milestones and reports are outlined in Table 1.
Milestone
Draft Proposal
Final Proposal
First Progress Report
Second Progress Report
Draft of Project Report
Final Project Report
Table 1: Milestones and Deadlines
Projected Completion Date Description
An outline of the project and its scope should be completed.
Current
The general idea of the project should be apparent.
Week of July 21
The project scope should be fully outlined and the project specifications should be decided on.
Week of August 18
Week of September 8
Week of September 29
Week of October 20
It is expected that the three model cases will have been built and run through the FE software analysis.
All analysis and comparison codes should have been written. Preliminary comparisons are expected.
Final comparisons and preliminary discussion of results should be completed.
Completion of project and final project report.
7 References
1.
Xu, Hongan, Jingtao, Du, and Li, W.L. (2010, August 30). Vibrations of rectangular plates reinforced by any number of beams of arbitrary lengths and placement angles.
2.
Cook, R., Malkus, D. Plesha, M., and Witt, J. 2002. Concepts and Applications of Finite
Element Analysis. 4th Ed. John Wiley & Sons, Inc.
3.
Sun, Eric Qiuli. Shear Locking and Hourglassing in MSC Nastran, ABAQUS, and
ANSYS.
4.
Junger, Miguel C., Feit, David. 1993. Sound, Structures, and Their Interaction.
Acoustical Society of America
5.
Abaqus 6.13 User Reference Manual; SIMULIA