Time Domain Aeroelastic Analysis of an Aerofoil
advertisement

Time Domain Aeroelastic Analysis of an Aerofoil
T. Varghese Mathew1 and Sharanappa V. Sajjan2
1Student,
Dept. of Aerospace Engg., MVJ College of Engineering, Bangalore – 560067, India
2Computational
and Theoretical Fluid Dynamics Division, CSIR-National Aerospace Laboratories,
Bangalore – 560017, India
ABSTRACT
Fully implicit time-marching scheme is used to determine the flutter boundary of the NACA64A010, typical wing section of Isogai wing. Unsteady RANS equations are solved to predict the
flow parameters required for the flutter estimation of the wing section. The implicit RANS
solver is coupled with the governing structural equations motion. Dual time stepping approach
is used to achieve the complete convergence of the flow in each time step. The response of the
wing section to the flow fluctuations are used to determine the critical flutter index at each
Mach number. Further the coupled tool has been used in prediction of flutter boundary of the
aerofoil. The results are obtained in the form of stable, unstable and neutral oscillations and
transonic dip for the aerofoil. The comparison of the computed results with the available data is
good.
Key words : Aero-elasticity, RANS solver, Transonic Flutter, Transonic dip
NOMENCLATURE
b Airfoil semi chord
c
Airfoil chord
Cl Coefficient of lift
Cm Coefficient of moment about elastic
axis
h
Plunging displacement of the elastic
axis ,positive down
m Airfoil mass per unit span
Mae Total moment about the elastic axis ,
positive nose up
M∞ Free stream mach no.
t
Real time
t* Pseudo time
Uf Flutter speed
α
Angle of attack (degrees)
Δα Pitching motion forcing amplitude
Δt
Implicit real time step
μ
Airfoil mass ratio, μ = m/πρb2
ρ
Air density
ωf
Frequency of forced oscillation
ωh,ωα Uncoupled natural frequency of
section in plunge and pitch.
τ
Non-dimensional structural time ,
(τ= ωα*t)
{F} Force matrix
[K] Stiffness matrix
[M] Mass matrix
[C] Damping matrix
{q} Displacement vector
𝑢
⃗∩
Grid velocity
𝑣
Velocity vector
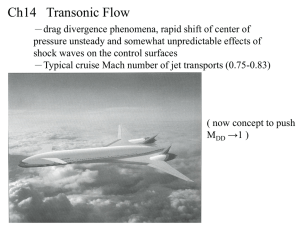
Introduction
With the requirement for higher speed and maneuverability of aircraft, many high speed
operating aircraft configuration were designed and brought to service. In-order to reduce the
weight and drag in transonic regimes and to operate above the sonic speed the aircraft wing
section thickness were reduced as it was found out that wave drag produced in the structure
were directly proportional to the square of the thickness resulting in thin airfoils section. Due to
this, the effect of inertia force at this flight regimes were of greater significance and its
interaction with the elastic properties of the airfoil section resulted in emergence of the study
of dynamic aero-elasticity especially flutter estimation. Transonic regime poses a challenge in
predicting the flutter speed due to the flow non-linearity's occurring in this regime due to large
non linear forces and moments being setup with small change in the aerodynamic
configuration. The interaction of the moving shock and the boundary layer further complicates
the problem for applying a linear approach.
Isogai [1] showed the existence of a sharp decrease in the flutter speed of a swept wing in
transonic flight (M∞ ≈ 0.7 − 0.9). This “transonic dip” phenomenon can only be predicted by
including the flow equation with non-linearity in the model.
Frane et al. [2] in his report stated that the in-capabilities of linear code in predicting the
accurate flutter boundary. The report further stated that the use of Euler code predicted
significantly lower flutter code compared to experimental result due to not including the
viscous effect. His work states that in order to accurately predict the flutter index, viscous
effects should be considered such as the boundary layer and the shock-boundary layer
interaction. The computational work carried by Frane using the RANS model showed good
agreement with the experimental results.
Francisco Palacios et al. [3] Describes the various capabilities of su2 .It describes the various
numerical (space and time integration schemes) methods available for solving physical problem
in the domain of CFD in SU2 RANS model.
Udbhav Sharma [4] His work mainly dealt with altering the flutter index graph by using the
variation provided in the baseline geometry and structural parameters to redesign the airfoil to
fit the required flutter index graph envelope. He too stated that linear models are incapable of
predicting the flutter boundaries as the flow is highly unsteady in the transonic regime.
Jameson [5] described in his report the use of multi-grid in solving fully implicit time stepping
approach for wing and airfoil pitching. Edward et al. [6] used Hytran 2 code to study the
accuracy and stability of various numerical techniques which may be used to transient time
marching equations. His computational work stated out that the nonlinear curve of flutter is the
direct effect of inclusion of angle of attack for NACA64A010 airfoil.
The above works states that Euler and linear model are incapable in capturing the exact flow
phenomenon occurring during Transonic flight regimes and the use of RANS model provides a
accurate tool for predicting the flutter index which is utilized by using the RANS solver provided
in su2 [3]. This paper describes the use of su2 code to predict the flutter boundary in the
transonic flight regime using fully coupled RANS model with the structural modal equation for
NACA64A010 section for Isogai swept wing.
AEROELASTIC SOLVER
Typical wing section module of su2 is the two dimensional analogy of the three-dimensional
wing. It consists of a point mass-spring system with two degree of freedom analysis, pitch and
plunge.
AERODYNAMIC SOLVER
Reynolds -Average Navier-stroke equations (Time marching implicit viscous flow) is implemented to
determine the flow parameters in the computation domain.
RANS equations :
𝑑𝑢
+ ∇𝐹𝐴𝐿𝐸 𝐶 − ∇. 𝐹 𝑣 − 𝑄 = 0 ..............................(for t(time ) > 0))
𝑑𝑡
where ,
𝑢
𝐹𝐴𝐿𝐸
𝐹𝑣
𝑄
=
𝐶
{𝜌, 𝜌𝑣 , 𝜌𝐸 }
...............................................................[Conservative variables]
𝜌(𝑣 − 𝑢
⃗∩)
= { 𝜌 𝑣 (𝑣 − 𝑢
⃗ ∩) + 𝐼 ̿ 𝑝 }
𝜌 𝐸 (𝑣 − 𝑢
⃗∩)+𝑝𝑣
.
𝜏̿
= {
}
𝜏.
̿ 𝑣 + 𝜇 ∗ 𝑡𝑜𝑡 𝑐𝑝 ∇𝑇
=
........................................[ Convective Flux]
..............................................[Viscous Flux]
𝑞𝜌
{ 𝑞𝜌𝑣⃗ }.....................................................................................[Source Terms]
𝑞𝜌𝐸
For a given problem the RANS model is used with no turbulence kind model resulting in the use
of laminar Navier-strokes equation.
Following steps are performed by the solver to set the flow for internal calculations for viscous
flow conditions
The solver uses the free stream temperature and the gas constant to determine the
speed of sound
Velocity vectors are determined from the above computed speed of sound and the free
stream Mach number and angle of attack (Deg.) provided by the user .
computes the free stream viscosity from the viscosity model specified or it takes the
default values hardcoded in the solver
free stream density is computed using the definition of Reynolds number and the other
parameters computed from above steps
The free stream pressure is determined using the perfect gas law.
Spatial integration is performed using the finite volume method while the time integration in
unsteady flow is done using the several implicit and explicit schemes. In this particular analysis
gradients of the flow variables are calculated using the weighted least square method at all grid
nodes and then averaged and used to represent the gradient value at the cell faces. An Euler
implicit scheme is implemented for time integration and the linear solver used to solve the
equation of time integration is Bi-conjugate Gradient stabilized method.
STRUCTURAL DYNAMICS SOLVER
Two set of equations are as stated below
𝑚 ℎ̈ + 𝑆𝛼 𝛼̈ + 𝐾ℎ ℎ = −𝐿
𝑆𝛼 ℎ̈ + 𝐼𝛼 𝛼̈ + 𝐾𝛼 𝛼 = 𝑀𝑎𝑒
Where L and Mae are the lift and the moment about elastic axis, Kh and Kα are the bending and
the torsion stiffness. The time is non-dimensionalized by multiplying it by the pitching
frequency which can be used to rewrite the equation in the standard governing form as
[𝑀]{𝑞̈ } + (𝐾){𝑞} = {𝐹}
Where,
1
[𝑀] = [
𝑥𝛼
𝜔
𝑥𝛼
[𝜔 ℎ ]
[𝐾]
]
,
=
[
𝛼
𝑟𝛼 2
0
2
0
𝑟𝛼
]
2
are the non-dimensional mass and stiffness matrices and,
ℎ
−𝐶𝑙
{𝐹} =
[
] , {𝑞} = { 𝛼𝑏 }
𝜋
𝐶𝑚
are the load and displacement vectors.
𝑉𝑓 2
The problem is solved in su2 tool as follows,
For time step n, the flow parameter in the computational domain is solved using the
implicit RANS solver module to obtain the value of Cl and Cm.
The corresponding values of the flow coefficient contributes to the load vectors in the
standard governing equation on the R.H.S
The structural modal equation is solved to obtain the values of pitch and plunge
The values of pitch and plunge are used by the grid movement code to move the grid to
a new position and the above procedure is repeated again for non-dimensional time
n+1.
As the solver exit at Time = total time interval provided by the user the response of the
system can be observed in the post processing tool for neutral oscillation which
indicates the flutter speed at the corresponding Mach number.
GEOMETRY AND COMPUTIONAL DOMAIN
NACA64010 airfoil is used as the geometry for typical wing section simulation with chord length
c=1m. C-grid is generated around the airfoil using the point-wise software. The domain is
extended to 15*c from the trailing of the airfoil in the downstream direction and 15*c in the
direction normal to the axis of the airfoil. The grid generated consists of 354928 structured
Quadrilaterals. The spacing of 0.0001 is provided towards the airfoil from the top and bottom
of the domain whereas a spacing of 0.001 is provided towards the trailing edge from the
downstream domain edge. The computational domain along with the generated grid is given
below figures 1-2.
Fig. 1: Computational grid
Fig. 2: Near airfoil grid
BOUNDARY CONDITIONS
The computational grid as shown in figures 1-2, totally, two types of boundary conditions
applied in su2 for flow initialization in flow domain in time marching scheme. The outermost
region was given the far field boundary condition with the values of free stream pressure of
101325 N/m2 and free stream Mach number for different transonic flow regimes and the
surface of the airfoil being provided the condition of wall (no slip).
RESULTS AND DISCUSSION
The flutter boundary of the Naca64A010 airfoil is predicted using the "Typical Wing Section"
module of the su2 software using time marching Euler implicit scheme with RANS model
coupled to the structural modal equation with following structural parameters hard coded in
the modal equations. xα = 1.8, r2α= 3.48, a = −2.0, ωh = 100rad/sec, ωα = 100 rad/sec, μ = 60.
Dual time step of 2nd order is used for unsteady simulation with total physical time of 1.4 sec
with number of internal iteration set to 20. As the pivot point lies ahead of the elastic axis, the x
coordinate for the moment origin is provided as -0.5m. The flow is maintained at Reynolds no
of 12.56e06 and the grid movement kind chosen for grid deformation is "AEROELASTIC", which
means it uses the spring analogy to deform the grids as per the body moves. The simulation is
run at various speeds keeping the Mach number constant in order to determine the response
of the airfoil with respect to the forces acting upon it.
Fig. 3: Pitch v/s Time plot at Mach no-0.75
At low speeds index (Vf), the disturbances caused due to interaction between the aerodynamic
and elastic forces setup on and in the body tends to dampen out quickly which leads to the
conclusion that the elastic forces are high enough to dampen the effect of disturbances
resulting in damped oscillation.
Fig. 4: Pitch v/s Time plot at Mach no-0.8
Fig. 5: Pitch v/s Time plot at Mach no-0.85
As the Vf reaches a particular value it exhibits a self sustaining neutral oscillation where the
inertial force, aerodynamic force and the elastic force are in exact equilibrium and denotes the
threshold value of flutter speed index denoted by critical flutter index. Above this critical flutter
index the elastic forces are not sufficient to dampen the oscillation caused and the time history
plot obtained is a diverging. The different responses are shown in figure 3, figure 4 and figure 5
respectively for particular operating Mach number.
Fig. 6: Pitch v/s plunge plot at Mach no=0.85
(neutral response)
Fig. 7: Pitch v/s plunge plot at Mach no=0.85
(Diverging and converging response)
The pitch v/s plunge plots for three response case at Mach number 0.85 are provided in figures
6 and 7. The figure 7 shows that the area under the hysteresis curve increases as the response
of the system increases from converging to diverging. The diverging hysteresis loop encloses
the converging case as the pitch and plunge variation increases along the response.
The present work on flutter simulation predict the transonic dip occurring at Mach number
0.85 at the flutter index value of Vf = 0.5388. The result is compared with the available flutter
index v/s Mach number curves as in figure 8. Alonso and Jameson's Euler code closely
resembles the flutter graph predicted by su2, but deviations in the critical flutter speed are
observed at Mach number 0.8 and 0.85 due to effect of viscosity. The critical flutter speed
predicted by su2 is above the values of those predicted by Alonso and Jameson code due to
consideration of viscous effects in the present calculations at Mach number 0.8 and 0.85
respectively. The su2 code also simulates the effect of angle of attack on flutter index up to
Mach no 0.9 when plotted against the Edward [6] simulated data. In general the su2 typical
wing simulation takes into account the effect of varying angle of attack and viscous effect on
flutter boundary estimation of NACA64A010 airfoil. The multiple flutter index obtained through
non viscous calculation disappears by considering RANS viscous model providing distinct critical
flutter index values at each Mach number as in figure 8.
Fig. 8: Flutter index v/s Mach no. plot (transonic dip curve)
CONCLUSION
Su2 solver predicts the transonic dip at Mach number 0.85 with the critical flutter index at
0.5388. The flow is accompanied by the presence of moving shock at the top and bottom
surface which interacts with the boundary layer and greatly alters the pressure distribution on
airfoil surface, causing changes in the local values of pressure coefficient resulting in changing
lift and moment about z-axis which in turn results in varying and time dependent highly non
linear aerodynamic forces acting on the airfoil contour and affects the structural dynamics
solutions. The data obtained from su2 seems to be in good agreement with the earlier
simulated reference data. The simulation confirms the role of moving shock in making the
flutter phenomenon highly non- linear.
REFERENCES
[1] Isogai, K., “On the Transonic-Dip Mechanism of Flutter of a Sweptback Wing,” AIAA Journal,
Vol. 17, No. 7, pp. 793-795, July 1979.
[2] Frane Majić, Ralph Voss2, Zdravko Virag, “boundary layer method for unsteady transonic
flow", Journal of Mechanical Engineering 58(2012)7-8, 470-481, 2012-04-03.
[3] Stanford University Unstructured (Su2): Open-Source Analysis And Design Technology For
Turbulent Flows, AiAA SciTech, AIAA 2014 -0243.
[4] Udbhav Sharma, "Effects of Airfoil Geometry and Mechanical Characteristics on the Onset of
Flutter", School of Aerospace Engineering Georgia Institute of Technology December 10, 2004.
[5] Jameson, A., “Time Dependent Calculations Using Multigrid, with Applications to Unsteady
Flows Past Airfoils and Wings,” AIAA Paper 91-1596, June 1991.
[6] Edwards, J. W., et al., “Time-Marching Transonic Flutter Solutions Including Angle of Attack
Effects,” Journal of Aircraft, Vol. 20, No. 11, November 1983, pp. 899-906.
[7] Kousen, K. A., “Non-Linear Phenomena in Computational Transonic Aeroelasticity,” Ph.D.
Dissertation, Dept. of Mechanical and Aerospace Engineering, Princeton University, January
1989.