3rd Ankara International Aerospace Conference
advertisement

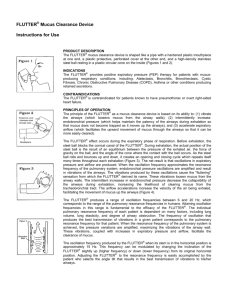
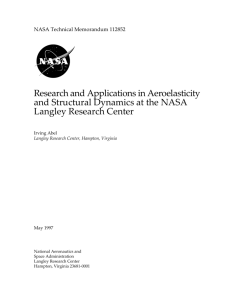
4. ANKARA INTERNATIONAL AEROSPACE CONFERENCE 27-29 September, 2007 - METU, Ankara AIAC-2007-109 AEROELASTIC ANALYSIS OF A TAPERED AIRCRAFT WING S. Durmaz1, O. Ozdemir Ozgumus 2, M. O. Kaya3 Istanbul Technical University, Faculty of Aeronautics and Astronautics, 34469, Maslak, Istanbul, Turkey ABSTRACT In this study, aeroelastic flutter analysis of a tapered aircraft wing that is modeled as an Euler-Bernoulli beam is carried out. Applying the Hamilton’s principle to the kinetic and the potential energy expressions, the governing differential equations of motion and the boundary conditions are obtained. The desired results are obtained by applying both one-term and two-term Galerkin Method. However, only the two-term Galerkin Method is introduced here since it already covers the one-term method. Additionally, an example that studies the Goland wing is taken from open literature in order to validate the calculated results and a very good agreement between the results is observed. WING MODEL In this study, a tapered aircraft wing that is given in Fig.1 is considered. Here, the x -axis coincides with the elastic axis, which is assumed to be straight, and the distance between the elastic axis and inertia axis at any point x is denoted by y x . The speed of the air flow relative to the wing denoted by U is assumed to be constant. U Elastic Axis x y Inertia Axis x y Figure 1. Elastic axis and inertia axis for a tapered cantilever aircraft wing in steady air flow The wing deformation can be measured by a bending deflection w in the z -direction and a rotation about the elastic axis. The angle is referred to the local angle of attack. The bending deflection, w , is positive downward while the rotation, , is positive if the leading edge is up. The chordwise distortion will be neglected. The combined bending and rotational vibration of the cantilever wing in steady air flow is shown in Figs.2 (a) and 2 (b). Here the chord length is given by c x 2b x . 1 Graduated Student in Aeronautics Department, E-mail: durmazseher@yahoo.com Research Assistant in Aeronautics Department, E-mail: ozdemirozg@itu.edu.tr 3 Associate Professor in Aeronautics Department, E-mail: kayam@itu.edu.tr 2 AIAC-2007-000 Durmaz, Ozdemir Ozgumus, Kaya U x w y x c z w y z (a) (b) Figure 2. (a) Bending deflection of the elastic axis (b) Rotation of the wing cross section FORMULATION Equations of Motion and the Boundary Conditions The kinetic and the potential energy expressions of an Euler-Bernoulli Beam that experience bendingtorsion coupling are taken from Ref.[4]. Applying the Hamilton’s principle to these energy expressions, the governing differential equations of motion and the boundary conditions are obtained as follows Equations of Motion: 2 x 2 2w 2w 2 EI m my L 0 x 2 t 2 t 2 (1a) 2w 2 I M 0 GJ my x x t 2 t 2 (1b) where the lift force, L and the aerodynamic moment, M are defined as follows 1 U ba L' 2UbCk w U b a b 2 w 2 (2a) 1 1 U ba M ' b a 2UbC k w U b a b 2 w 2 2 (2b) 1 1 a U b b w 8 2 2 3 GJ is the torsional stiffness, m mass per unit length, I is the mass moment of inertia per unit length, is the air density, C L is the local lift coefficient and t is the time. Here, EI is the bending stiffness, Boundary Conditions: w 0 x At x0 w At xL w w 2 w 2 w 0 EI 2 EI 2 GJ x x x x x (3a) 2 Ankara International Aerospace Conference (3b) AIAC-2007-000 Durmaz, Ozdemir Ozgumus, Kaya Exponential Solution Function: A sinusoidal variation of w( x, t ) and ( x, t ) with a circular natural frequency functions are approximated as exponential solutions. is assumed and the wx, t wx e it (4a) x, t x e it (4b) where wx A1 f1 x eit A2 f 2 x eit (5a) x B11 x eit B2 2 x eit (5b) In this study, both one-term and two term Galerkin Methods are applied. However, only the two-term Glerkin Method is introduced here since it already covers the one-term method. Substituting Eqs. (4a)-(5b) into Eqs. (1a) and (1b) gives d 2 d 2 f1 b2 A1 Z 2 EI mf 2 C k if 1 b 2 f1 1 2 k dx dx d 2 d 2 f2 b2 A2 Z 2 EI mf 2 C k if 2 b 2 f 2 2 2 k dx dx b3 b3 b3 1 B1 my 1 2 2 C k 1 2 C k a i 1 i 1 b 3 a 1 k k k 2 b3 b3 b3 1 B2 my 2 2 2 C k 2 2 C k a i 2 i 2 b 3 a 2 0 k k k 2 1 1 A1 2 my f 1 2Ub 2 C k a if 1 2 b 3 a f 1 2 b 3 f 1 2 2 2 1 1 A2 2 my f 2 2Ub 2 C k a if 2 2 b 3 a f 2 2 b 3 f 2 2 2 2 d d 1 1 1 1 B1 GJ 2 I 1 2U 2 b 2 C k a 1 2Ub 3 C k a a i 1 dx 2 2 2 dx 1 1 1 a b 3U a i 1 2 b 4 a a 1 b 3Ui 1 2 b 4 1 2 2 8 2 d d 2 1 1 1 B 2 GJ 2 I 2 2U 2 b 2 C k a 2 2Ub 3 C k a a i 2 dx 2 2 2 dx 1 1 1 a b 3U a i 2 2 b 4 a a 2 b 3Ui 2 2 b 4 2 0 2 2 8 2 where k b U and Z 1 2 1 ig . 3 Ankara International Aerospace Conference (6a) (6b) AIAC-2007-000 Durmaz, Ozdemir Ozgumus, Kaya Tapered Beam Formulas: In this study, a beam model that tapers in one plane, xy plane, is considered. Therefore, the general bx , the cross-sectional area, Ax , the distance between the elastic axis and inertia axis, y x , the elastic axis location (positive rearward), ax , the moment of inertia, I y x , the polar moment J x and the mass moment of inertia per unit length I of a beam, are given by equations for the half of the veter length, [2, 3]. x x x x bx b0 1 cb , a x a 0 1 cb , y x y 0 1 cb , A x A0 1 cb L L L L x x x I y x I y 0 1 c b , J x J 0 1 c b , I x I 0 1 c b L L L Here, the subscript 0 denotes the values at the root section of the tapered beam and (7) cb represents the breadth taper ratio which can be expressed as follows cb 1 b b0 (8) These tapered beam formulas are used in the related parts of the expressions given by Eqs. (6a) and (6b). APPLICATION OF THE GALERKIN METHOD In this section, application procedure of the two-term Galerkin Method is described. Following the procedure, Eq. (6a) is multiplied by f1 and the resultant expression is integrated from 0 to L which gives the following equation L L L L d 2 d 2 f1 b2 2 2 2 2 A1 Z 2 EI f dx mf dx 2 C k if dx b f dx 1 1 1 1 0 0 0 dx 2 k 0 dx L L L L 2 2 2 d d f2 b 2 A2 Z 2 EI f dx mf f dx 2 C k if f dx b f f dx 1 1 2 1 2 1 2 0 0 0 dx 2 k 0 dx L L L b3 b3 1 B1 my 1 f1dx 2 2 C k 1 f1dx 2 C k a i1 f1dx k k 2 0 0 0 L L L L b3 b3 3 i1 f1dx b a1 f1dx B2 my 2 f1dx 2 2 C k 2 f1dx k k 0 0 0 0 L L L b3 b3 1 2 C k a i 2 f1dx i 2 f1dx b 3 a 2 f1dx 0 k k 2 0 0 0 (9) Writing the terms of Eq.(9) as matrix coefficients gives i i 1 A1 Za111 a112 C k a113 a114 A2 Za121 a122 C k a123 a124 B1 b111 C k 2 b112 k k k (10) i 1 i C k b113 b114 b115 B2 b121 C k 2 b122 C k b123 b124 b125 0 k k k 4 Ankara International Aerospace Conference AIAC-2007-000 Durmaz, Ozdemir Ozgumus, Kaya where d 2 d 2 f1 EI 2 f1dx dx 2 dx 0 L L a111 0 0 d 2 d 2 f2 f dx a121 2 EI 2 1 dx dx 0 L L a114 b f dx 2 L a113 2b 2 f12 dx a112 mf12 dx 2 1 0 L L a123 2b 2 f1 f 2 dx a124 b 2 f1 f 2 dx 0 0 1 b113 2b a 1 f1dx 2 0 L L b112 2b 1 f1dx 3 3 0 L L b115 b3a1 f1dx b121 my 2 f1dx 0 0 1 b123 2b a 2 f1dx 2 0 L 3 L b124 b 2 f1dx 3 0 As described above, Eq. (6a) is multiplied by which gives the following equation L a122 mf1 f 2 dx 0 L b111 my 1 f1dx 0 L b114 b31 f1dx 0 L b122 2b3 2 f1dx 0 L b125 b3a 2 f1dx 0 f 2 and the resultant expression is integrated from 0 to L i i 1 A1 Za 211 a 212 C k a 213 a114 A2 Za 221 a 222 C k a 223 a 224 B1 b211 C k 2 b212 k k k (11) i 1 i C k b213 b214 b215 B2 b221 C k 2 b222 C k b223 b224 b225 0 k k k Eq. (6b) is multiplied by following equation 1 and the resultant expression is integrated from 0 to L which gives the i i A1 a 311 C k a 312 a 313 a 314 A1 a 322 C k a 322 a 323 a 324 B1 b311 b312 k k 1 i i i 1 C k 2 b313 C k b314 b315 b316 b317 b318 B 2 b321 b322 C k 2 b323 k k k k k (12) i i i C k b324 b325 b326 b327 b328 0 k k k Eq. (6b) is multiplied by following equation 2 and the resultant expression is integrated from 0 to L which gives the 5 Ankara International Aerospace Conference AIAC-2007-000 Durmaz, Ozdemir Ozgumus, Kaya i i A1 a 411 C k a 412 a 413 a 414 A2 a 422 C k a 422 a 423 a 424 B1 b411 b412 k k 1 i i i 1 C k 2 b413 C k b414 b415 b416 b417 b418 B 2 b421 b422 C k 2 b423 k k k k k (13) i i i C k b424 b425 b426 b427 b428 0 k k k Eqs. (10)-(13) can be written in a 4 4 matrix form as follows : i Za111 a112 C k k a113 a114 Za a C k i a a 213 114 211 212 k a311 C k i a312 a313 a314 k i a411 C k a412 a413 a414 k i Za121 a122 C k a123 a124 k i Za221 a222 C k a223 a224 k i a322 C k a322 a323 a324 k i a422 C k a422 a423 a424 k b111 C k 1 i b C k b113 b114 b115 2 112 k k 1 i b211 C k 2 b212 C k b213 b214 b215 k k 1 i i i b311 b312 C k 2 b313 C k b314 b315 b316 b317 b318 k k k k 1 i i i b411 b412 C k 2 b413 C k b414 b415 b416 b417 b418 k k k k b121 C k 1 i b C k b123 b124 b125 2 122 k k 1 i b221 C k 2 b222 C k b223 b224 b225 k k 1 i i i b321 b322 C k 2 b323 C k b324 b325 b326 b327 b328 k k k k 1 i i i b421 b422 C k 2 b423 C k b424 b425 b426 b427 b428 k k k k A 0 1 A2 0 B 0 1 B2 0 (14) SOLUTION PROCEDURE Determinant of Eq.(14) is taken and made equal to zero. Solving this characteristic equation for a certain k value, four roots which are Z 1 , Z 2 , Z 3 , Z 4 , are found. If the imaginary part of any root is positive, the wing experience flutter. Assuming that the imaginary part of the second root, Z 2 , is positive and knowing that Z 1 2 1 ig , it can be written that Z 2 i 1 2 1 ig (15) 6 Ankara International Aerospace Conference AIAC-2007-000 Durmaz, Ozdemir Ozgumus, Kaya Considering Eq.(15), the frequency value at which flutter occurs is calculated as follows 1 2 flutter 1 rad. / sec. (16) Using the calculated flutter frequency and knowing that k k b U U flutter flutterb k b U , the flutter speed is found as follows ft / sec. (17) RESULTS The computer package Mathematica is used to write a computer program for the expressions obtained in the previous sections. Calculation of the flutter speed is made both for a uniform and for a tapered wing model. The effects of several parameters are examined and in order to validate the calculated results, datas of the Goland’s wing whose parametric values are given below are used. GJ 0 2.39 10 6 lb ft2 EI 0 23.6 10 6 lb ft2 I 0 1.943 slug ft a0 1 / 3 b0 3 ft y 0 0.19973 ft L 20 ft m 0.746 slug/ft Firstly, the flutter frequency and the flutter speed of a uniform Goland wing are found as k 0.47 and U flutter 446.462 ft/sec. which are very close to the ones found by Ref.[5]. In order to validate the calculated results, a comparison is made in Table 1. Table 1. Flutter Speed, Flutter Frequency and Reduced Frequency of a Uniform Goland Wing Flutter Speed Flutter Frequency f rad / sec Reduced Frequency (k ) 447 69 0.47 One-Term Galerkin 443.610 69.883 0.4727 Two-Term Galerkin 446.462 70.035 0.4706 U f ft / sec Analytical Study (Ref. [4]) Present Study In Fig. 3, variation of both the bending and the torsion frequencies of a uniform wing with respect to the free stream velocity, U is introduced. Here it is noticed that as the free stream velocity increases, the frequencies get closer to each other which increases the possibility of flutter. In Fig. 4, variation of the flutter speed, U f with respect to the location of the elastic axis, a , is introduced. Here it is noticed that as the elastic axis gets closer to the leading edge (forward), it gets more possible for the wing to get into flutter because the flutter speed gets lower. In Fig. 5, variation of the flutter speed, U f with respect to the taper ratio, cb is introduced. Here it is noticed that as the taper ratio increases, the flutter speed increases which makes it less possible for the wing to experience fluttr. 7 Ankara International Aerospace Conference AIAC-2007-000 Durmaz, Ozdemir Ozgumus, Kaya 100 80 Bending Frequency 60 Torsional Frequency 40 20 U 200 400 Figure 3. Uf 600 800 U plot 800 700 600 500 400 300 -0.4 -0.2 0 Figure 4. Elastic Axis Location, a , and Flutter Speed, U f , Relation 8 Ankara International Aerospace Conference 0.2 a AIAC-2007-000 1200 Durmaz, Ozdemir Ozgumus, Kaya Uf 1000 800 600 400 cb 0.0 0.2 0.4 0.6 0.8 REFERENCES [1] Ozdemir Ozgumus, O. and Kaya, M.O., Energy expressions and free vibration analysis of a rotating double tapered Timoshenko beam featuring bending–torsion coupling, International Journal of Engineering Science, 45, 562-586, 2007. [2] Özdemir Ö. ve Kaya M.O., Flapwise bending vibration analysis of a rotating tapered cantilevered Bernoulli-Euler beam by differential transform method, Journal of Sound and Vibration, 289, 413–420, 2006. [3] Hodges, D.H. ve Pierce, G.A., Introduction to Structural Dynamics and Aeroelasticity, Cambridge Aerospace Press, 2002. [4] Lin, J. And Lliff, K.W., Aerodynamic Lift and Moment Calculations Using A closed Form Solution of The Possio Equation, NASA, 2000 9 Ankara International Aerospace Conference