Supporting Information_revised
advertisement

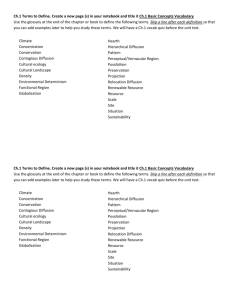
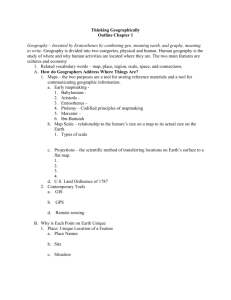
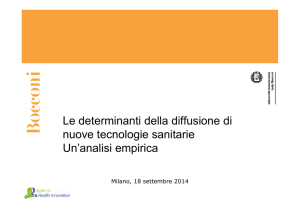
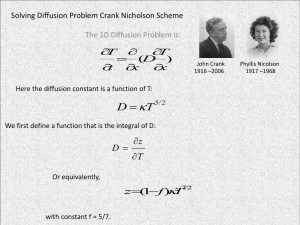
Hydrophobic Catalytic Janus Motors: Slip Boundary Condition and Enhanced Catalytic Reaction Rate Manoj Manjare*, 1 Yuan Ting Wu,2 Bo Yang, 2 and Y.-P. Zhao 1 1 Nanoscale Science and Engineering Center Department of Physics and Astronomy The University of Georgia, Athens, Georgia 30602, USA 2 Department of Mechanical and Aerospace Engineering University of Texas, Arlington, Texas 76019, USA Supporting Information Preparation of Hydrophobic and Hydrophilic Janus Micromotors Silica microbead suspensions of 2.01 μm and 5.20 μm (Catalog No. SS04N, SS06N, Bangs Laboratories) were first diluted to a 1:3 volume ratio in methanol, and a 2 μl droplet was spread onto a 2 × 2 cm2 cleaned silicon surface. The substrates were then transferred to the chemical evaporation chamber for (HeptadecaFluoro - 1, 1,2, 2 - tetra-hydrodecyl) TrichloroSilane (HFTS) surface modification 1. The HFTS (catalog No., SIH5841, Gelest, INC.) deposition is a self-limiting process and usually results in a monolayer coating. Then the HFTS treated beads and bare silica beads were loaded into an electron beam evaporation system with a base pressure of about ~ 10-6 Torr. An adhesion layer of 10 nm of Ti was deposited on the beads at a deposition rate of 0.05 nm/s (measured by a quartz crystal microbalance), followed by 25 nm of Pt deposition at 0.05 nm/s. After the deposition, Janus motors with hydrophobic/catalytic surfaces and hydrophilic/catalytic surfaces were realized simultaneously. The as-deposited micromotors were suspended in 18 MΩcm de-ionized water by ultra-sonication. A droplet of 3 μl micromotor suspension was dispensed on a clean silicon surface. A droplet of the same 1 volume of H2O2 solution of desired concentration was added. The motion of different motors at different H2O2 concentration was observed and movies were recorded using a Phantom 9.1v Charge Coupled Device (CCD) camera mounted on a metallurgical microscope (Mitutoyo FS110) under 50× magnification at 30 frames per second. Videos were analyzed to obtain motion parameters using a software provided by the camera manufacturer. Numerical Solution of Diffusion and Diffusion-induced Hydrodynamics around a Selfpropelled Catalytic Janus Motor The problem of self-propelled catalytic Janus motor involves two processes: the mass transport and diffusion-induced hydrodynamics. Generally these two processes are coupled. In the present case, they can be decoupled and solved sequentially: to solve the diffusion (mass transport) problem first and then the hydrodynamics. The sequential solution may be justified by comparing the relatively large diffusion length of over 45 m for 1 s (estimated by DO t with 2 O2 diffusion coefficient DO = 2 × 10-9 m2/s in water) to motor travel distance of several m in 1 2 s. Also, it is assumed that only O2 in the solution serves as an active propellant to move the catalytic Janus motor. Their formulations (i.e., the governing equations and boundary conditions) are described in the main text. Below we briefly describe the boundary element technique used to numerically solve these problems along with some additional numerical results. Diffusion Alternatively to the differential equation-based formulation, the diffusion problem can be expressed in a boundary integral equation, which is given by 2 1 C O2 r * r, r ' J O2 r ' dS r ' * r, r ' CO2 r ' dS r ' , s 2 s 2 (S1) where S is the motor surface, r and r ' are position vectors of points on S, and * and * are the fundamental solutions to the potential problem in an infinite space given by 2, * r, r ' 1 , 4 | r ' r | 4r | rr rn|' * r ,r' (S2) ' ' 3 , (S3) where n¢ is the outward normal vector at r ' on surface S. A numerical boundary element method can be developed on basis of Eq. (S1) to solve the diffusion problem. The standard procedure is briefed below. First, the particle surface is discretized into a number of elements (e.g., see Fig. S1). Each element is assigned with a node at the middle point. Within the element the concentration C O2 and the flux J O2 are approximated as uniform. Substituting the approximated piecewise-constant fields of C O2 and J O2 in Eq. (S1), one may obtain 1 (n) C O2 * r ( n) , r ' dS r ' J O( m2 ) * r ( n) , r ' dS r ' CO( m2 ) , 2 m s( m) m s( m) (S4) where superscripts n and m indicate a certain node/element, and the surface integrals over each element can be numerically calculated. Along with the boundary conditions given in the main text, this system of algebraic equations can be solved for the nodal concentrations. For more details of the numerical technique, one may consult with textbook 2. 3 Figure S1. A sample mesh used in the boundary element solution. The color code indicates the concentration field plotted upon the surface. Accuracy of the numerical solution depends on the mesh used to approximate the particle surface. For the reported diffusion field in Fig. 3a, 90 divisions along angle and 50 divisions along the hoop direction were used. The mesh density was adapted with a grading ratio of 0.95 towards the equator. Solutions with coarser and finer meshes were checked and the comparison indicated the reported diffusion field is accurate. It may be worth noting that the concentration gradient along the particle surface exhibits a logarithmic singularity due to the boundary condition of a stepwise flux, at the equator. Our mesh was dense enough to handle this type of weak singularity for converged hydrodynamic prediction below. Since the diffusion field are ) proportional to O2 flux J O( Pt , which is assumed to be uniform on the Pt surface, the diffusion 2 fields are scaled with it. The particle radius a and diffusion coefficient DO2 are involved in the nondimensionalization. 4 Diffusion-induced Hydrodynamics Similarly to the previous diffusion problem, the Stokes flow problem can be alternatively expressed in a boundary integral equation as 1 ur u * r, r ' t r ' dS r ' t * r, r ' u r ' dS r ' , s 2 s (S5) where u* and t* are the fundamental solutions of velocity and traction for Stokes flow in an infinite space, given by 2, 1 I r' r r' r ' 8 | r r | | r ' r |3 3 r' r r' r r' r n' . 4 | r' r |5 u* r, r ' t* r, r' , (S6) (S7) Using the same procedure as described above, a boundary element method can be developed based on Eq. (S5) to numerically solve the hydrodynamic problem 2. For the sake of brevity, the numerical procedure is not repeated here. Below, some numerical results are presented that hopefully can help understand the main text. The example of a Janus motor with a non-slippery Pt half surface ( ls( Pt ) = 0) and a partially slippery non-Pt half surface (with varying l s( non Pt ) ) is solved by using the boundary element method. The interfacial parameter, O2 , is taken to be uniform over the entire motor surface. The second term in Eq. (2) is evaluated with O2 concentration field shown in Fig. 3a. The variations of normalized tangential velocity jump u' DO2 / k BTO2 J O( Pt2 ) and normalized tangential traction DO a / k BTO J O( Pt ) versus angle in three cases of l s( non Pt ) / a = 0.001, 0.1, 10 are shown in 2 2 2 5 ) Figs. S2 and S3, respectively. Since k BTO2 and J O( Pt are prescribed as loading source to the 2 hydrodynamic problem, they are used to scale the results. The materials constants DO2 , and particle radius a are involved in the nondimensionalization. Comparing Figs. S2 and S3 to Fig. 3a, it can be seen that the profiles of tangential velocity jump and tangential traction are similarly focused at the edge of Pt surface. They exhibit the same logarithmic singularity at the equator as the O2 gradient field. The used mesh has captured well the weak singularity resulting in converged particle speed shown in Fig. 3b. On the Pt surface (0° < θ < 90°), the fields are mostly unaltered by varying slip length on the non-Pt surface. In contrast, on the non-Pt surface (0° < θ < 90°), it is interesting to note that the (normalized) tangential velocity jump across the interface is only slightly altered meanwhile the (normalized) tangential traction decreases continuously when l s( non Pt ) / a increases. Figure S2: Variation of normalized tangential velocity jump u' DO2 / k BTO2 J O( Pt2 ) with angle along the motor surface for three cases l s( non Pt ) / a = 0.001, 0.1, and 10. 6 Figure S3: Variation of normalized tangential traction DO2 a / k BTO2 J O( Pt2 ) with angle along the motor surface for three cases l s( non Pt ) / a = 0.001, 0.1, and 10. Reference: 1 2 H. Tada, H. Nagayama, Langmuir 10, 1472 (1994). C. A. Brebbia, J. C. F. Telles, and L. C. Wrobel, Boundary Element Techniques: Theory and Applications in Engineering; Springer London, Limited, 2012. 7