epis_pilot___status_report_2
advertisement

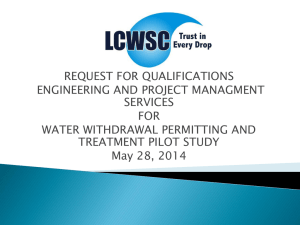
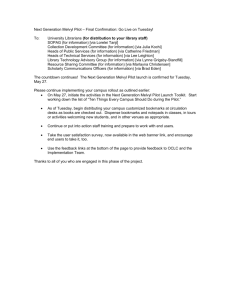
EPIS Pilot – Status Paper 2 (03 June 2011) EPIS Pilot Status Report: 2 Background In December 2010 the PLATINA project produced a draft Functional Specification for an EPIS Pilot in which a number of specific (potential) applications of EPIS were considered. This specification would form the basis for the realisation of the Pilot itself, in close cooperation with the IRIS Europe II project, and serve to illustrate potential functionality within a dissemination and evaluation program. Following discussions between the PLATINA and the IRIS Europe II projects it was agreed in May 2011 that the scope of the EPIS Pilot be reduced, in part due to the fact that the user requirements, and perceived need for such a service, were still tentative and that the full potential of EPIS was still subject to many issues relating to legal and organisational barriers and not so much the technical capabilities of the involved EU Member States. The revised EPIS pilot would therefore focus on providing a working demonstrator to confirm the technical capability whilst forming output that could be used in a dissemination program for discussions with potential users through, amongst others, the Logistic Task Force. Whilst the original specification considered the distribution of position, cargo and voyage data, the revised scope only considers position data. This appeases a number of current legal and organisational barriers whilst it is envisaged that the resulting Pilot will not disproportionally compromise the ability to use the Pilot for discussions with potential users for the further expansion of such services to include cargo and voyage data. Purpose of the EPIS Pilot The European Position Information Service (EPIS) is a concept under development as a potential augmentation to River Information Services (RIS). An eventual EPIS is intended to support authorities and logistic service providers in providing data on the actual position, voyage and cargo of a vessel and is provided on a pan-European basis whereby a user based in one Member State can retrieve information on the progress of a vessel in another Member State in order to support the relevant (and authorised) operations. For the purposes of the EPIS pilot only position data will be considered; an evaluation for the need for cargo and/or voyage data will form part of the dissemination and evaluation activities within the Pilot. The tracking or tracing of a vessel is dependent on specific conditions and access to vessel-related data is always only available to authenticated and authorised users. It is not intended that EPIS will replace RIS information exchange services on a national basis for processes such as traffic management or the required cross border information exchange. It is foreseen that the position information for the EPIS pilot is derived from AIS broadcasts from participating vessels on the inland waterway network of Austria, Slovakia, Hungary, Belgium and the Netherlands. Initial consideration for the need for additional data through existing electronic (voyage) information processing systems, ERINOT messages and the European Hull Database pilot has been revised for the EPIS pilot and will not be required at this stage. The structure and content of the messages for exchange of information defined in the IRIS Europe project, including access rights principles, have been accounted for as much as possible. To this end 03 June 2011 Page 1 EPIS Pilot – Status Paper 2 (03 June 2011) it is the intention that EPIS is in line with the RIS standards as defined in the context of the RIS directive, in particular standards related to Vessel Tracking and Tracing, Electronic Reporting (ERI) and the project standard for international RIS Data Exchange (R2D2). Status The following Milestones have been determined for the realisation of the EPIS Pilot and the subsequent dissemination and evaluation activities: Milestone 1 2 3 4 5 6 7 Description Revised Technical Specifications (according scope of limited EPIS pilot to facilitate development by participating national RIS centres) EPIS pilot internal test EPIS pilot tested and delivered for connection to third parties / final specifications Third parties (participating national RIS centres) connected to EPIS pilot Presentations conducted / EPIS pilot system end of operational phase / pilot technical support complete Evaluation performed Final report issued Completion Date 31/05/2011 15/06/2011 15/07/2011 31/07/2011 30/10/2011 30/11/2011 31/12/2011 The Pilot is currently being realised and will be ready for internal tests by 15 th June. Connection to other RIS centres will be available by 15th July latest and it is the intention to complete connections by 31st July. Proof of Concept The EPIS Pilot is to be realised as a Proof of Concept under the following assumptions and principles: To realize the minimal functionality EPIS, is described as: Only position information (but also ENI number and time-stamping) will be recorded and shared (no other ship-related information, such as voyage, cargo, hull will be stored or distributed); Historical (position) data will be logged, but will not otherwise be visible or published (no historical tracks). The last reported position should be known; Only position information can be accessed by authorized parties (no other related information); RIS centres will periodically (automatically every 15 minutes) send their position information to the EPIS and EPIS will publish the last received positions (EPIS will not have the functionality to request RIS centres for additional updates or for ensuring that position information is actual); The interfaces are based on web services and existing R2D2 messages (see Figure 1); The current IRIS-layer does not (yet) have SSL functionality. This functionality will be realized subject to applicable RIS standards. If necessary this will require coordination with other EU partners and their RIS specialists; The EPIS will use its own (simple) user accounts for authentication (no single sign on); 03 June 2011 Page 2 EPIS Pilot – Status Paper 2 (03 June 2011) Role Based Access will not be implemented (EPIS user accounts will be used for authorization); Interfacing with other databases (EU Hull DB, ERINOT server etc.) will not be realized at this stage; The functioning of the EPIS Pilot in its ability to respond to position requests is highly dependent on the input to EPIS by the participating RIS centres. Figure 1: EPIS system 03 June 2011 Page 3 EPIS Pilot – Status Paper 2 (03 June 2011) Process The following process(es) are to be supported by the (revised) EPIS Pilot: See Note 1 See Note 2 Figure 2: EPIS process Note 1: The initial process with regard to the “Access Rights Matrix” will not form part of the Pilot and will be completed on an individual basis with respect to ensuring access merely for illustrative purposes. In the event of a valid user request for ‘connection’ to the Pilot then the necessary authentication and authorisation checks will be conducted manually before granting access. This is to reduce any burden on the partners with respect to data provision. 03 June 2011 Page 4 EPIS Pilot – Status Paper 2 (03 June 2011) Note 2: The national RIS centres that have agreed to provide regular updates on position data are: Austria; Slovakia; Hungary; Belgium; The Netherlands. In the case of Austria, Slovakia and Hungary it has been agreed that position updates are to be provided at intervals of 15 minutes. For Belgium and The Netherlands it has been agreed that, whilst the ambition is to provide the updates every 15 minutes, the update interval may be re-evaluated during pilot testing and connection to participating countries in order to allow for the expected high volume in data traffic. Position data is to be provided by the participating RIS Centre III (RIS Centre Vessel Current) by means of the message “Not_data.xml”. On request of the participating RIS Centres the “receipt_data.xml” message will not be used. The “Not_data.xml” message will include the relevant data from the Header, IMO message 1 and IMO message 5. See appendix. The revised EPIS Pilot only deals with position data and as such fields such as Destination, TypeShipand Cargo and ETA are not required even if known. For the limited purpose it is envisaged that key data fields include: Header: o TestID; o SentAt; o From. IMO_Msg 1: o MMSI (vessel id); o NavigationalStatus; o Position (Lat/Long); o TimeStamp. IMO_Msg 5: o Name; o PositioningDevice. As previously stated (Note 1) the authentication and authorisation process will be conducted “manually” whereby verified users will be able to access pertinent data on the basis of individual requests to the administrator of the EPIS pilot. It is envisaged that this may be conducted on an adhoc basis in order for potential users to evaluate and provide feedback on the potential of EPIS during the dissemination phase of the EPIS pilot. “Req_data.xml” is to be used by ‘authorised’ users to request the latest position of a particular vessel. EPIS will respond with the “resp_data.xml” message. 03 June 2011 Page 5 EPIS Pilot – Status Paper 2 (03 June 2011) It is envisaged that the EPIS pilot will remain in an operational phase until end October 2011, whereby participating RIS centres should provide the “Not_data.xml” messages until this time. Following this the operational phase of the Pilot will be suspended. Actions The following actions are foreseen in the coming period (June 2011): 1. (Re-) Confirmation partners with respect planned milestones (3,4,5): Partners requested to (re-)commit to the planning dates. In the case of Austria, Slovakia, Hungary and Belgium this refers to the ability to complete connection to the EPIS pilot by 31 July 2011. 2. Further definition relevant data fields for “not_data.xml”: Whilst an indication of (some) relevant data fields has been provided above it is necessary for each partner to indicate which data fields can be sent as part of each update. 3. Test scheme (timing): Following confirmation by each partner a test scheme can be set up indicating when connection can be made to the EPIS. 4. Request_data protocol for Pilot purposes: Discussions will commence on which users can/should be able to access which data from the EPIS. A pre-condition is the respect of privacy and confidentiality issues. 03 June 2011 Page 6 EPIS Pilot – Status Paper 2 (03 June 2011) Appendix The following table for the “Not_data.xml” has been extracted from Section 3.1.1.1. of the RIS Data Exchange XML Messaging Reference Guide (v1.3.1). All citations to “chapters” etc. refer to the original document: Item Header Occ 1 Version Type Length 1 Text 3 0-1 0-1 Text Text 8 38 1 DT 19 0-1 Int From 1 Text 7 To 1 Text 7 StatusCode 0-1 Enum StatusMessage 0-1 Text Role 0-n ENUM User_ID 0-1 Text 255 Password 0-1 Text 32 User_Location 0-n Text 20 User_permitted_re quest_area 0-n Text 40 TestId MSRefId SentAt TimeoutValue 03 June 2011 0-255 Description The Version field is an attribute of the Header element. The format of the version is n.m. The current version of the header is 0.1. If a new XSD is released, the version has to be increased. All RIS centres are not allowed to accept older XML messages. Test Case identification. Only useful for testing. Unique Identifier for each sent Message. This Id has to be inserted by the client in the Response Message. If a message has to be retransmitted a new MSRefId has to be used, and the old one is not valid any more. Notification creation date and time (ISO 8601 UTC format) Timeout value (in seconds) indicating when the request should be considered as expired and must not be processed. Used for the international exchange of any defined xml message whereas the field “From” contains always the Codification of the RIS Centre that has sent the xml message. The name of the receiver of the message (Codification of the RIS Centre in case of international data exchange) Global status code. Details are to be defined. Mandatory only for Messages answering a request or confirming a Notification. See 3.6 of the Technical System Concept for more details. Global status message string. Mandatory only for Messages answering a request or confirming a Notification Roles of requesting user (TCA,…) used for Req_Data Messages only. This field is only important for RIS Centre- RIS Centre communication. ; Not needed within this message Not needed within this message; Identifies the requesting user in the international data exchange by the unique UserID as defined within the Process Description (chapter 11: Annex 7: Unique UserID) Element: Password of the user; Not needed within this message Location Code(s) of the User; Not needed within this message 2 Location Codes; the user is permitted to request data of vessels currently navigating between those two locations; Not needed within this message Page 7 EPIS Pilot – Status Paper 2 (03 June 2011) Body Item Occ 1 Notify_AIS 0-n Type Length Response element node(s). More than 1 element node might be given (batch process) IMO_Msg1 0-1 MessageID RepeatIndicator 1 1 Int Int MMSI NavigationalStatus 1 1 Int Int ROT 1 Int SOG 1 Int PositionAccuracy 1 Int Longitude 1 Int Latitude 1 Int COG 1 Int TrueHeading 1 Int TimeStamp 1 DT UN_CountryCode 1 Text 2 UN_Location_Cod e FairwaySectionCod e FairwayHectometre 1 Text 3 1 Text 1 Text Blue sign 1 Int RegionalBits 1 Int Spare 1 Int 03 June 2011 Description Identifier for this message 1, always 1 Used by the repeater to indicate how many times a message has been repeated. Default = 0; 3 = do not repeat any more User ID (MMSI number) 0 = under way using engine;… see Inland AIS Standards for details ±127 (–128 (80 hex) indicates not available, which should be the default). Coded by ROTAIS=4.733 SQRT(ROTINDICATED) degrees/min ROTINDICATED is the Rate of Turn (720 degrees per minute), as indicated by an external sensor. +127 = turning right at 720 deg Speed over ground in 1/10 knot steps (0-102.2 knots) 1023 = not available; 1022 = 102.2 knots or higher *1 1 = high (< 10 m; Differential Mode of e.g. DGNSS receiver) 0 = low (> 10 m; Autonomous Mode of e.g. GNSS receiver or of other Electronic Position Fixing Device) ; default = 0 Longitude in 1/10 000 min (±180 degrees, East = positive, West = negative. 181 degrees (6791AC0 hex) = not available = default) Latitude in 1/10 000 min (±90 degrees, North = positive,South = negative, 91 degrees (3412140 hex) = not available = default) Course over ground in 1/10° (0-3599). 3600 (E10 hex) = not available = default; 3 601 – 4 095 should not be used. Degrees (0-359) (511 indicates not available = default). Timestamp (data and time) of tactical traffic information (UTC Format YYYY-MM-DD-HHMMSS+z) UN Country Code calculated from vessel´s position UN Location Code calculated from vessel´s position Fairway Section Code calculated from vessel´s position Fairway Hectrometer calculated from vessel´s position Indication if blue sign is set 0 = not available = default, 1 = no 2 = yes, 3 = not used *2 Reserved for definition by a competent regional authority. Should be set to zero, if not used for any regional application. Regional applications should not use zero. Not used. Should be set to zero. Reserved for future use Page 8 EPIS Pilot – Status Paper 2 (03 June 2011) Item Occ Type RAIM_Flag 1 Int CommunicationSta te 1 Int Length IMO_Msg5 0-1 MessageID RepeatIndicator 1 1 Int Int MMSI AISVersion 1 1 Int Int IMO_Number CallSign 1 1 Int Text 7 Name 1 Text 20 TypeShipAndCarg o 1 Int DimensionsShipCo nvoy 1 Int PositioningDevice 1 Int ETA 1 DT MaximumPresentS taticDraught Destination 1 Int 1 Text DTE 1 Int Spare 1 Int 03 June 2011 Description RAIM (Receiver Autonomous Integrity Monitoring) flag of Electronic Position Fixing Device; 0 = RAIM not in use = default; 1 = RAIM in use) See chapter 7 (Annex 2 – Reference to ITU-R M. 1371-1: table 15B) 20 Identifier for this message 5 Used by the repeater to indicate how many times a message has been repeated. User ID (MMSI number) AIS Version Indicator: 0 = Station compliant with AIS Edition 0; 1 - 3 = Station compliant with future AIS Editions 1, 2, and 3. 1 – 999999999 ; 0 = not available = default *1 7 × 8 bit ASCII characters, "@@@@@@@" = not available = default. *2 Maximum 20 characters 8 bit ASCII, @@@@@@@@@@@@@@@@@@@@ = not available = default. Type of Ship and Cargo, 0 = not available or no ship = default; 1 - 99 = as defined in § 3.3.8.2.3.2; 100 - 199 = preserved, for regional use; 200 - 255 = preserved, for future use. *3 Reference point for reported position; Also indicates the dimension of ship in metres (see Fig. 18 and § 3.3.8.2.3.3) *4,5,6 Type of Electronic Positioning Fixing device: 0 = Undefined (default); 1 = GPS, 2 = GLONASS, 3 = Combined GPS/GLONASS, 4 = Loran-C, 5 = Chayka, 6 = Integrated Navigation System, 7 = surveyed, 8 = manual entry, 9 - 15 = not used. Timestamp (data and time) of ETA (UTC Format YYYY-MM-DD-HH-MM-SS+z) in 1/10 m, 255 = draught 25.5 m or greater, 0 = not available = default; *5 Destination of vessel (Codification UN Country Code/UN Location Code/Terminal Code) Maximum 20 characters using 8-bit ASCII; @@@@@@@@@@@@@@@@@@@@ = not available Data terminal ready (0 = available, 1 = not available = default) Spare. Not used. Should be set to zero. Reserved for future use. Page 9