133
advertisement

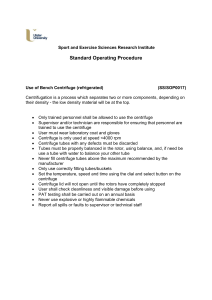
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 00 (2014) 000–000 www.elsevier.com/locate/procedia “APISAT2014”, 2014 Asia-Pacific International Symposium on Aerospace Technology, APISAT2014 Implication of Dynamic Unbalance to the Inertial Accelerometer Calibration with Vibrafuge Xue-Ming Donga, Wei Guanb,*, Xiao-Feng Mengb a Changcheng Institute of Metrology and Measurement (CIMM), Huanshan villiage, Wenquan Town, Beijing 100095, China Science and Technology on Inertial Laboratory of Beihang University (BUAA), No. 37, Xueyuan Road, Beijing 100191, China b Abstract In practical navigation and guidance applications, inertial accelerometers are always subjected to multiple accelerations at the same time. But inertial accelerometers are usually calibrated in the laboratory with either pure vibration or constant acceleration according to IEEE standards and ISO standards. In this case, there are inconsistent characteristics of sensors working in the laboratory and operational conditions because the input accelerations are different. In order to decrease the inconsistency, calibration of sensors with vibrafuge, a machine which can produce multicomponent inputs, is proposed. But there is a critical problem for the vibrafuge is the dynamic unbalance due to uneven distribution of mass. In order to build a high-performance vibrafuge for metrological purpose, we analyze the implication of dynamic unbalance of the vibrafuge to the output acceleration in this paper. The structure of the vibrafuge is introduced to explain how the dynamic unbalance affects the vibrafuge. Kinetics analysis is presented to show the implication of the dynamic unbalance. By simulation and examples, we estimate the influence of the dynamic unbalance. © 2014 The Authors. Published by Elsevier Ltd. Peer-review under responsibility of Chinese Society of Aeronautics and Astronautics (CSAA). Keywords: accelerometer; calibration; centrifuge; dynamic unbalance; vibrafuge 1. Introduction Conventional calibration methods for inertial accelerometers are based on either single constant acceleration or vibration. But sensors working in the real world are surrounded by multiple accelerations, including constant * Corresponding author. Tel.: +086 18710150124; fax: +086-010-82338221. E-mail address :guanfuzi@aspe.buaa.edu.cn 1877-7058 © 2014 The Authors. Published by Elsevier Ltd. Peer-review under responsibility of Chinese Society of Aeronautics and Astronautics (CSAA). 2 Xue-Ming Dong/ Procedia Engineering 00 (2014) 000–000 acceleration and vibration. In order to improve the application accuracy of accelerometers, we have to test them with multiple inputs since different inputs of the accelerometers will cause different performances. Hence we proposed to calibrate the accelerometer with constant and sine acceleration. A review of available equipments which can produce constant and sine accelerations is presented in [1]. They are rate table with tilted axis of rotation, double centrifuge, and vibrafuge. Among them, the vibrafuge is a special machine. It is applied to environmental testing at present [2,3]. It consists of a centrifuge and a vibration exciter, and is able to provide large constant accelerations and high-frequency sine accelerations (above 20 Hz)[4,5]. Fig. 1. Structure of a vibrafuge As shown in Fig. 1, the vibration table is mounted on the centrifuge. The centrifuge produces the constant acceleration while the vibration table produces the sine acceleration. In the calibration, we mount the sensor under calibration on the vibration table. In this case, the dynamic unbalance of the centrifuge is an inevitable problem in the investigation because the accelerometer will move along with the vibration table periodically and the distribution of the mass is unbalance [6]. Such unbalance will impose periodic force and vibration on bearings, and cause damage to the centrifuge [7]. Moreover, the dynamic unbalance will affect the output of the vibrafuge. In this paper, we investigate the dynamic unbalance of the vibrafuge, and evaluate its implications. 2. Dynamic unbalance This section analyzes the dynamic unbalance of the aforementioned vibrafuge. The unbalance mass is moving along with the vibration table, we can describe the vibration as: (1) x A sin 2 ft where A is the vibration amplitude of the vibration table; f is the vibration frequency of the vibration table, and is the initial phase of the vibration table. As illustrated in Fig. 2, Or is the intersection of the rotation plane and the spindle. Om is the effective center of mass of the unbalance mass m. In this context, we define an effective unbalance mass me by mR mR0 me R0 R R0 x m mx R 0 e (2) where R is the distance from the effective center of mass of the accelerometer to O r; R0 is the distance from the balance point of the vibration table to Or; The effective unbalance mass induces cause radial force Fr and axial force Fz. The distance between the Om and Or is R. In order to analyze the influence of the unbalance to the spindle, we will transfer the additional force and moments on the middle point of the spindle (Omz). According to kinetics analysis, we write the following expressions with respect to [6]: Fr me R0 2 Fz me g M h F R F r z (3) Xue-Ming Dong/ Procedia Engineering 00 (2014) 000–000 3 Fig. 2. Additional force and moments caused by the unbalance mass Fig. 2. Additional force and moments caused by the unbalance mass where m is the effective unbalance mass, and Or Omz h . The spindle will have a radial displacement r1 relating to the Z axis due to the additional force: r1 Fr me R0 2 , kr kr (4) where kr is the radial rigidity, and an angular displacement relating to the Z axis due to the additional moments: M me R0 2 h me gR0 , k k (5) where k is the angular rigidity. Because of this angular displacement, another radial displacement of the spindle is: r2 d h tan , (6) where d is a fixed vertical distance from the effective center of mass of the accelerometer under test to the rotation plane of the centrifuge. Then the dynamic working radius of the centrifuge is r r1 r2 m R 2 h me gR0 me R0 2 d h tan e 0 kr k (7) 3. Implication of the dynamic unbalance According to [3], output acceleration of a vibrafuge is composed of the constant acceleration produced by the centrifuge and the sine acceleration produced by the vibration table. The acceleration component of the input axis of the accelerometer under test is a0 2 R ( 2 4 2 f 2 ) A sin t (8) In this context, we analyze the implication of the dynamic unbalance to the output acceleration of the centrifuge. According to the principle of the centrifuge, that part of output acceleration is: 4 Xue-Ming Dong/ Procedia Engineering 00 (2014) 000–000 a 2R (9) In the form of relative error, we can write the ratio of acceleration error a to a as a R 2 a R (10) where is the angular velocity error. In this paper, we take it as zero. And, the radius error R r (11) Therefore, we can analyze the influence of the dynamic unbalance to the output acceleration based on (1), (7), and (10) as: m R 2 h me gR0 R me R0 2 d h tan e 0 k R kr mx 2 2 h g d h tan mx k kr R0 x (12) R0 x For typical values, 15 rad s, h 0.5 m, m 1 kg, A 12.5 mm, and k 1107 Nm/rad , we can estimate the maximum angular displacement mx 2h g k as 1.53125 107 rad . Hence the angular is small, we have 2h g 2h g tan mx mx k k (13) and R mx 2 2h g d h mx k R kr R0 x (14) k (15) For convenience, the following definitions are used: b m 2 kr , c m d h 2 h g and we have R0 R bx cx x b c b c 1 R R0 x R0 x R0 x (16) x A (17) Referring to (1), we know and b c 1 R0 R R0 b c 1 R0 A R R0 A Hence the relative radius error is bounded by (18) Xue-Ming Dong/ Procedia Engineering 00 (2014) 000–000 0 A R b c R R0 A 5 (19) To show the numerical level of the relative radius error, we presented more typical values as follows: kr 5 106 N m, d 0.1 m, R0 2 m, f 20 Hz, 0 . With respect to (1) and (16), we calculated the relative radius error by LabVIEW. As shown in Fig. 3, the maximum relative radius error is around 3.21541 107 . When we calibrate inertial accelerometers with precision as high as 1 10 8 , this relative error caused by the dynamic unbalance cannot be omitted. Fig. 3. Simulation results of the relative radius error. 4. Conclusion To reduce the inconsistency of the sensors working in field and in laboratory, we propose calibrating accelerometers with multiple accelerations. Vibrafuge, which is used to do environmental tests, is able to be applied to produce constant and sine vibrations. However, dynamic unbalance is an inevitable problem. In this paper, we analyzed the implication of dynamic unbalance to the output acceleration of the centrifuge. By simulation, the level of the relative radius error is given. Analysis and methods presented in this paper can be a reference to the future study of this topic. Acknowledgements The wok was financially supported by the National Natural Science Foundation Innovation Group of China (Grant No. 61121003), the Changjiang Scholars and Innovative Research Team in University(IRT1203). References [1] W. Guan, Xueming Dong and Xiaofeng Meng, Calibration of Accelerometer with Multicomponent Inputs, in Proceedings of 2014 IEEE International Instrumentation and Measurement Technology Conference: Instrumentation and Measurement for Sustainable Development(IEEE Catalog Number: CFP14IMT-USB, ISBN: 978-1-4673-6385-3), Montevideo, Uruguay, 12-15 May 2014, pp. 16-19 [2] R. Jepsen and E. Romero, Testing in a combined vibration and acceleration environment, Proceedings of IMAC XXIII, Orlando, F.L., USA, 2005. [3] Actidyn Systems., V67 Technical Description, http://www.actidyn.com/wp-content/uploads/2010/06/v67.pdf, (2010). [4] W. Guan, X.F.Meng, X.M.Dong,Testing Vibration Rectification Error with Vibrafuge, MAPAN-Journal of Metrology Society of India, [online avaible] DOI 10.1007/s12647-014-0101-5 [5] Dong Xue Ming, Guan Wei, Meng Xiao Feng, Combined accelerations produced by vibrafuge, Applied Mechanics and Materials 543547(2014), pp. 971-974. [6] YANG Yafei, Influence of Dynamic Unbalance on Centrifuge Accuracy, Journal of Test and Measurement Technology, 22(2)(2008) 95-98. [7] Jiang Xiaoxiong, Study on dynamic balance of precision centrifuge[D], Harbin Institute of Technology, Harbin, 2005