grl53671-sup-0001-supplementary
advertisement

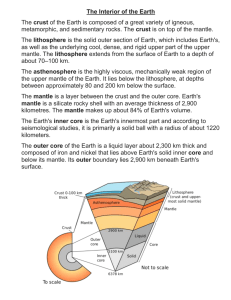
Geophysical Research Letters Supporting Information for Evidence for long-lived subduction of an ancient tectonic plate beneath the southern Indian Ocean N.A. Simmons1,*, S.C. Myers1, G. Johannesson2, E. Matzel1 & S.P. Grand3 1Geophysical Monitoring Programs, Lawrence Livermore National Laboratory and Decision Sciences, Lawrence Livermore National Laboratory 3 The Jackson School of Geosciences, the University of Texas at Austin 2Systems Contents of this file Text S1 to S6 Figures S1 to S17 Tables S1 Introduction The supporting information contains details on the construction of the LLNL-G3D-JPS global joint Vp-Vs tomographic model not included in the main text. The supplement also contains information and images regarding a variety of tests and comparisons performed to support our conclusions. Text S1. LLNL-G3D-JPS model architecture The LLNL-G3D-JPS model is a global-scale 3-D model of P and S wave velocity in the crust and mantle. It results from the simultaneous inversion of a large suite of regional and teleseismic travel time data. The goal of the overall project is to develop more complete and accurate images of the Earth for use in seismic monitoring applications, including accurate regional and teleseismic travel time prediction for events occurring anywhere in the world. This new model represents the most recent version developed by a team at Lawrence Livermore National Laboratory (LLNL) (see https://missions.llnl.gov/nonproliferation/nuclear-explosion-monitoring/global-3d-seismictomography). The model architecture is based on a set of spherical tessellation grids (Figure S1). The grids are built by successive refinement by bisecting triangles projected to the spherical surface, and each refinement establishes a new level in a hierarchy of grids. Model nodes are defined along vectors that begin at the center of the sphere and go through each of the vertices of the triangles. These nodes are placed at various radii allowing for the explicit representation of Earth’s ellipticity, mantle stretching based on 1 the expected hydrostatic shape of the Earth, and undulations of velocity discontinuities (e.g. the Moho). The hierarchical nature of the tessellation refinement process allows for computationally efficient model lookup and interpolation in a piecewise linear sense (Simmons et al. 2011). Earth’s crust, mantle and core are represented by a total of 97 surfaces and ~1.7 million model nodes (Figure S1). The crust and upper mantle are defined at a tessellation level of 7 (~1° node spacing). The lower mantle is defined at a tessellation level of 6 (~2° node spacing) and the inner/outer cores velocities are treated as 1-D. We chose to leverage existing models by incorporating them into a starting model that is later modified by tomographic imaging. This is done for two primary reasons. First, there are certain aspects of the Earth that tomographic imaging cannot resolve with available body-wave data, including the details of the crust and the undulations of velocity discontinuities such as the transition zone boundaries. Secondly, incorporating the long-wavelength velocity structure of the mantle into the starting model improves the initial estimate of the ray path, thus reducing the non-linearity of the imaging process. For the crust, we developed a starting model derived from the recent Crust1.0 model (Laske et al. 2013). We incorporate each of the layers including water, ice, 3 sediments and 3 crystalline crust layers. Each crustal surface is treated as discontinuous by defining two sets of nodes, one on the top side and one on the bottom side of each boundary giving a total of 16 model surfaces. Undulations of the upper mantle transition zone discontinuities are also included (Lawrence and Shearer 2008). For the mantle velocities, we developed a starting model derived from the LLNL-G3Dv3 model (Simmons et al. 2012) in the upper mantle, and GyPSuM (Simmons et al. 2010) in the lower mantle (publicly available at http://www.iris.edu/ds/products/emc/ and the LLNL website listed above). The LLNL-G3Dv3 model is a P-wave (only) model developed with largely the same model architecture and tools/techniques used to construct the new model. GyPSuM is a global joint inversion of seismic travel times and a suite of geodynamic observations including the global free-air gravity field, tectonic plate divergences, dynamic topography of Earth’s surface, and the excess ellipticity of the core-mantle boundary. The properties involved in the inversion (P-wave velocity, Swave velocity, density) are coupled via mineral physics constraints in the form of relative heterogeneity ratios. GyPSuM provides a good estimate of the long-wavelength lower mantle velocity structure. Starting with these previous velocity models greatly reduces the non-linearity of the current problem and allows for fewer ray tracing/inversion iterations that are computationally intensive. Text S2. Travel time prediction, imaging, and event location techniques We employ several techniques/applications that we have developed for travel time based imaging and location purposes. These processes are detailed in a number of recent papers (Simmons et al. 2011, 2012; Myers et al. 2007, 2009, 2011) and we briefly describe them here. The reason for constructing a complex model that includes the full crust, undulating discontinuities, and Earth’s asphericity directly built-in is to compute self-consistent and accurate travel times at regional and teleseismic distances using a single model. Ray paths computed with a 1-D velocity model are inaccurate for a global 3-D model, particularly for predicting regional travel times and constructing models of the upper mantle velocity structure (Simmons et al. 2012). Therefore 3-D ray tracing through a model with all of the built-in model complexities is necessary. The 3-D ray tracing approach we have developed is based on the ‘Zhao’ method (Zhao et al. 1992) which 2 uses iterative pseudobending in the continuous domain of the media (Um and Thurber 1987) while also satisfying Snell’s law at each velocity discontinuity. We modified the approach to approximate the absolute minimum-time path, which may be significantly different than the path through a 1-D model (Figure S1). We also consider multiple paths that might arrive at approximately the same time as the predicted minimum time path to mitigate the non-linearity related to the interdependence of velocity and 3-D ray path (Simmons et al. 2011, 2012). Data coverage in tomographic problems is notoriously variable due to the global seismicity patterns and locations of seismic instruments. Some regions are well-covered while others have very limited information, thus controlling the resolving power. We have developed an imaging technique that accounts for the variable data density and leverages the hierarchical structure of the spherical tessellation grids. The multi-scale imaging approach called Progressive Multilevel Tessellation Inversion (PMTI) is conceptually similar to multi-grid and wavelet-based approaches. The PMTI process is relatively straightforward and we have demonstrated how the technique produces only long-wavelength, regional velocity trends where data are sparse and finer details where ray-path sampling is dense, without developing irregular meshes or special smoothing operators (Simmons et al. 2011). The PMTI process was used to generate two previous global models (Simmons et al. 2011, 2012) and was also employed to construct the new joint tomographic model LLNL-G3D-JPS by solving for velocity structure defined at tessellation Level 1 through Level 7, which is approximately 1-degree resolution (Figure S1). Bayesloc (Myers et al. 2007, 2009, 2011) is a method and software package developed at LLNL for seismic event location (https://missions.llnl.gov/nonproliferation/nuclear-explosion-monitoring/bayesloc). Bayesloc formulates the joint probability over event locations, travel times corrections, measurement precisions, and phase labels for a set of geographically clustered events. Bayesloc is a hierarchical statistical model that utilizes the Markov-Chain Monte Carlo (MCMC) sampling strategy. Recently the Bayesloc procedure was expanded for global data sets (rather than single clusters) using an adaptive regional clustering technique. It has been demonstrated that the global Bayesloc multiple-event relocation process produces high-quality data ideal for global seismic tomography (Simmons et al. 2012). Specifically, the output locations and other information provided by Bayesloc yields seismic images that are less complex while also improving fit to the tomographic data set, relative to tomographic methods based on traditional single-event location techniques. Our tests suggest that iterative tomography/relocation is unnecessary if Bayesloc is used at the outset of creating a seismic image (see Simmons et al. (2012) for extensive comparisons of multiple-event and single-event location approaches). Text S3. Data and joint inversion In this study, we used over 3 million high quality arrivals for a variety of crustal, regional and teleseismic P and S waves (Table S1). The original arrival time ‘pick’ data were collected from many sources including the International Seismological Centre (ISC, http://www.isc.ac.uk), the National Earthquake Information Center, (NEIC, http://earthquake.usgs.gov/regional/neic) and a variety of regional bulletins. Other data are from seismic deployments for Peaceful Nuclear Explosions (PNEs), refraction surveys, the USARRAY and PASSCAL deployments (http://www.iris.edu). Many arrivals were measured at LLNL as well. In addition to the pick data, teleseismic S waves, multiples, and core phases were measured via waveform correlation techniques. These 3 high-quality waveform correlation picks have been the primary seismic data used in the development of the ‘TX’ seismic and joint seismic-geodynamic models (e.g. Grand et al. 2002; Simmons et al. 2007). We performed 2 Bayesloc global multiple-event relocation processes: one for the pick data and one for the waveform correlation data. These pick and waveform correlation data were not merged into one multiple-event relocation step. The reasoning for this is that we expect that travel times computed from hypocenters (i.e. point of earthquake initiation) is most suitable for the high-frequency arrival time picks (P waves and Sn) whereas the travel times for the low-frequency waveform correlation data are best measured from a location close to the earthquake centroid (i.e. location of maximum energy release). There should also be a distinct difference in origin time and centroid time (Kagan 2003). We developed a model of P- and S-wave velocity structure via joint (simultaneous) inversion of the full suite of travel time data listed in Table S1. A single step in the inversion process is to solve the linear system of equations for S-wave slowness perturbations, ∆𝑢𝑆 : 𝜀𝑃 𝑟𝑃 𝜀 𝐿 (𝑅 , 𝑉 /𝑉 ) [ 𝑃 𝑃 𝑃/𝑆 𝑆 𝑃 ] ∆𝑢𝑆 = [ 𝜀 𝑟 ] 𝑆 𝑆 𝜀𝑆 𝐿𝑆 (1) In Equation 1, 𝜀𝑃 and 𝜀𝑆 are P- and S-wave system weights respectively. These weights are chosen by calculating the ratio of the norms of the P and S wave data vectors, 𝑟𝑃 and 𝑟𝑆 respectively to provide a balance of influence in the inversion (Simmons et al. 2010). 𝐿𝑃 and 𝐿𝑆 are the sensitivity (Fréchet) kernels for the P and S wave datasets. The dimensions of the 𝐿𝑃 and 𝐿𝑆 matrices change with each step of the PMTI process where low resolution models are created prior to moving on to higher resolution models that perturb the previous solution. Thus the sensitivity kernel matrices become larger with each step of the PMTI process. For example, the combined storage size of the sensitivity kernels is ~550 Mbytes for the tessellation Level 1 system and increases to ~14 Gbytes for the Level 7 system in the final stage of the inversion. Although not shown in Equation 1, each datum is individually weighted based on the travel time standard deviation determined by the Bayesloc multiple event location process. The relative heterogeneity ratios (𝑅𝑃/𝑆 ) are used to scale S-wave velocity perturbations to P-wave velocity perturbations: 𝑅𝑃/𝑆 = 𝛿𝑙𝑛𝑉𝑃 𝛿𝑙𝑛𝑉𝑆 = ∆𝑉𝑃 /𝑉𝑃 ∆𝑉𝑆 /𝑉𝑆 (2) Using the approximation ∆𝑉/𝑉0 ≈ −𝑉0 ∆𝑢, we can relate small changes of velocity (V) to slowness variations (∆𝑢), 𝑉0 is a reference velocity. Therefore, we can transform a relative velocity heterogeneity ratio to a slowness heterogeneity ratio and relate P- to S-wave slownesses by multiplying the ratio by 𝑉𝑆 /𝑉𝑃 . We chose to use the depth-dependent relative heterogeneity ratios that were determined as part of the development of the joint seismic-geodynamic GyPSuM model (Figure S2). This scaling profile was determined through an extensive optimization process that took into account mineral physics constraints for thermal variations in the mantle. Tomographic inversion with 3-D ray paths is a non-linear process since the paths depend on the velocity structure and vice versa. Therefore, the tomographic inversion 4 and determination of the ray paths is iterated a number of times (see the flowchart in Figure S2). In the case of LLNL-G3D-JPS, only 3 iterations were needed for the ray paths and velocity model to converge because the starting model incorporated a good estimate of 3-D velocity structure in the upper mantle. Lateral variation in the ratio of Pwave and S-wave velocity heterogeneity is not accounted for in the 1-D scaling described above. Therefore, at the final stage of the iterative process, we performed 2 separate joint inversions. In one of the final inversions, we weighted the P-wave data more heavily than the S-wave data so that P-wave data could influence the result more. For the second inversion, we weighted the S-wave data more heavily. This overall process allows for a robust, joint inversion based on a depth-dependent, thermal expectation of Vp/Vs scaling, but also allows some freedom for the heterogeneity to deviate from the thermal constraint so that travel time prediction for each type of data is improved (Figure S2). Text S4. Resolution tests We performed a large number of resolution tests by creating synthetic models that represent the important features beneath the Indian Ocean that are imaged in the LLNL-G3D-JPS model. The inversion process (PMTI) used to construct the real and synthetic models are made to be as similar as possible. One difference is that we began with a 3-D starting model to construct LLNL-G3D-JPS, whereas the model updates for the resolution tests are relative to a 1-D model. In this way, we are able to test the ability of our data set to recover the important features without relying upon outside information. One set of these tests involve synthesizing the slab anomalies shown in cross section 1 in Figure 2A of the main text and performing an inversion to test recovery (Figure S3). The best model (in Figure S3A) represents the minimum amount of material needed to fully mimic the actual model. The amplitude of the input anomalies are equivalent to +1% shear wave perturbations in the lower mantle, +2.5% in the transition zone, and -8% in the shallow upper mantle. Note how the synthetic model is recovered very well in the lower mantle, including the fast blob on the left hand side of the sections at ~1800 depth. The input slab in the transition zone is only 150 km thick; however it appears to fill the entire width of the transition zone in the recovery. The synthetic low-velocity anomalies are confined to be above 80 km depth, but tend to smear downward into the upper mantle. The amplitude recovery tends to be 30-50% in the upper mantle and >70% in the lower mantle. The addition of uniformly distributed random noise, with a noise level of 100% of the root-mean-squared travel time residuals (1:1 signal-to-noise ratio), shows that the main features are still recoverable with very high noise conditions (Figure S3B). Other tests (Figure S3C-F) demonstrate the effects of leaving out portions of the slab or low-velocity anomaly near the surface. Figure S4 illustrates resolution tests performed to test the resolvability of the transition zone remnants observed beneath the Indian Ocean. We extend the tests to the northwestern edge of the Indian Ocean to see if the subduction zone (or an additional one) possibly extended further along the margin of Gondwana. In each of the tests (S4A-D), we constructed synthetic models with small blobs in the bottom 150 km of the transition zone with +2.5% shear wave perturbation. The only difference between the tests is the lateral size (area) of each of the remnants, and the level of noise (0 or 100% rms). 5 Text S5. Model comparisons Figures S5-S8 compare global tomographic models side-by-side. We note that a number of models detect portions of the transition zone anomalies we image, included some that detect the full 7000-km long segment tracking the Southeast Indian Ridge (SEIR) (Figure S5). Models are highly variable beneath the southern Indian Ocean, but many “see” portions of the anomalies we have detected as much more coherent features (Figures S6-S8). The methods we have developed are well-suited to generate coherent images in these data sparse regions. Text S6. The effects of data sets and processing procedures Figures S9-S15 demonstrate the individual effects of each our modeling procedures including: the effects of combining P- and S- wave data in a constrained inversion, multiple-event location (Bayesloc), 3-D ray tracing, and multi-resolution inversion (PMTI). The tests are conducted by leaving one of the model elements or datasets out of the process and constructing the same cross section images shown in the main text across the southern Indian Ocean. References Auer, L, Boschi, L., Becker, T. W., Nissen-Meyer, T. & Giardini, D. Savani: A variable resolution whole-mantle model of anisotripic shear velocity variations based on multiple data sets. J. Geophys. Res. 119, 3006-3034 (2014). Becker, T. W. & Boschi, L. A comparison of tomographic and geodynamic mantle models. Geochem. Geophys. Geosys. 3 (2002). Grand, S. P. Mantle shear-wave tomography and the fate of subducted slabs. Phil. Trans. Royal Soc. London 360, 2475-2491 (2002). Houser, C., Masters, G, Shearer, P. & Laske G. Shear and compressional velocity models of the mantle from cluster analysis of long-period waveforms. Geophys. J. Int. 174, 195-212 (2008). Kagan, Y. Y. Accuracy of modern global earthquake catalogs. Phys. Earth Planet. Int. 135, 173-208 (2003). Kustowski, B., Ekström, G. & Dziewoński, A. M. Anisotropic shear-wave velocity structure of the Earth’s mantle: A global model. J. Geophys. Res. 113(B06306) doi: 10.1029/2007JB005169 (2008). Laske, G., Masters., G., Ma, Z. & Pasyanos, M. Update on CRUST1.0 - A 1-degree Global Model of Earth's Crust, Geophys. Res. Abstracts 15, Abstract EGU2013-2658 (2013). Lawrence, J. & Shearer, P. Imaging mantle transition zone thickness with SdS-SS finitefrequency sensitivity kernels. Geophy. J. Int.l 174, 143-158, doi:10.1111/j.1365246X.2007.03673.x (2008). Lekić, V. & Romanowicz, B. Inferring upper-mantle structure by full waveform tomography with the spectral element method. Geophys. J. Int. 185, 799-831 (2011). Li, C., van der Hilst, R., Engdahl, E., Burdick, S. A new global model for P wave speed variations in Earth's mantle. Geochem Geophys. Geosys. 9, Q05018 (2008). Mégnin, C. & Romanowicz, B. The three-dimensional shear velocity structure of the mantle from the inversion of body, surface and higher-mode waveforms, Geophys. J. Int. 143, 709-728. 6 Myers, S., Johannesson, G. & Hanley, W. A Bayesian hierarchical method for multipleevent seismic location. Geophys. J. Int. 171, 1049-1063, doi:10.1111/j.1365246X.2007.03555.x (2007). Myers, S., Johannesson, G. & Hanley, W. Incorporation of probabilistic seismic phase labels into a Bayesian multiple-event seismic locator. Geophys. J. Int. 177, 193-204, doi:10.1111/j.1365-246X.2008.04070.x (2009). Myers, S., Johannesson, G. & Simmons, N. Global-scale P wave tomography optimized for prediction of teleseismic and regional travel times for Middle East events: 1. Data set development. J. Geophys. Res. 116, doi:10.1029/2010JB007967 (2011). Panning, M. P., Lekić, V. & Romanowicz, B. A. The importance of crustal corrections in the development of a new global model of radial anisotropy. J. Geophys. Res. 115 (2010). Ritsema, J., van Heijst, H.J. & Woodhouse, J.H. Complex shear velocity structure imaged beneath Africa and Iceland, Science 286, 1925–1928 (1999). Ritsema, J., Deuss, A., van Heijst, H. J. & Woodhouse, J. H. S40RTS: a degree-40 shear-velocity model for the mantle from new Rayleigh wave dispersion, teleseismic traveltime and normal-mode splitting function measurements. Geophys. J. Int. 184, 1223-1236 (2011). Simmons, N. A., Forte, A. M. & Grand, S. P. Thermochemical structure and dynamics of the African superplume. Geophys. Res. Lett. 34, doi: 10.1029/2006gl028009 (2007). Simmons, N., Forte, A., Boschi, L. & Grand, S. GyPSuM: A joint tomographic model of mantle density and seismic wave speeds. J. Geophys. Res. 115, doi:10.1029/2010JB007631 (2010). Simmons, N., Myers, S. & Johannesson, G. Global-scale P wave tomography optimized for prediction of teleseismic and regional travel times for Middle East events: 2. Tomographic inversion. J. Geophys. Res. 116, doi:10.1029/2010JB007969 (2011). Simmons, N., Myers, S., Johannesson, G. & Matzel, E. LLNL-G3Dv3: Global P wave tomography model for improved regional and teleseismic travel time prediction. J. Geophys. Res. 117, doi:10.1029/2012JB009525 (2012). Um, J. & Thurber, C. A fast algorithm for 2-point seismic ray tracing. Bull. Seis. Soc. America 77, 972-986 (1987). Zhao, D., Hasegawa, A. & Horiuchi, S. Tomographic imaging of P-wave and S-wave velocity structure beneath northeastern Japan. J. of Geophy. Res. 97, 19909-19928, doi:10.1029/92JB00603 (1992). Zhao, D., Yamamoto, Y. & Yanada, T. Global mantle heterogeneity and its influence on teleseismic regional tomography. Gondwana Res. 23, 595-616 (2013). 7 Figure S1. (a) Spherical tessellation grids for 4 different recursion (resolution) levels and the surfaces defined in the LLNL-G3D-JPS model. Level 7 is the highest resolution level used and corresponds to lateral node spacing of ~1 arc degree. (b) The model consists of 97 surfaces from the surface to the center of the Earth, none of which are spherical. (c) The difference between 1-D and 3-D ray paths for an event along the Japan subduction zone. The figure and velocity structure in the background is from the LLNLG3Dv3 model (Simmons et al. 2012). Note that the event and station locations are hypothetical. 8 Figure S2. Flowchart of the joint inversion process and scaling relationship between Vp and Vs heterogeneity (𝑅𝑃/𝑆 ). Three-dimensional ray tracing and joint PMTI inversion is performed multiple times with equal influence by the P- and S-wave data while enforcing the scaling relationship which is consistent with mineral physics estimates of thermal effects. Each of the data types are weighted more heavily in two separate joint inversions at the last stage, effectively relaxing the thermal scaling constraint to account for potential compositional variations. 9 Figure S3. Resolution tests of the cross section from Kerguelen to Indonesia. For each test, the actual model is shown in the center column, the synthetic input is in the middle column, and the recovery is shown in the right column. (a) A noiseless test with the minimum amount of material needed to recreate the actual image. (b) The same test as in (A), but with 100% root-mean-squared noise added (1:1 signal-to-noise ratio). (c) A test without the low-velocity anomaly near the surface. (d) A test without the highvelocity transition zone anomaly. (e) A test without a 400-km thick shallow mantle segment. (f) A test without a deep-mantle segment. 10 Figure S4. Resolution test of transition zone remnants. For each test, the actual model is shown in the center column, the synthetic input is in the middle column, and the recovery is shown in the right column. The dashed magenta circles indicate anomalies that are possibly detectable and the solid magenta circles indicate anomalies that would likely be recoverable by the data. (a) The synthetic remnants are small blobs similar to circular disks with ~2 degree radius and occupy the bottom 150 km of the transition zone. (b) The same test as in (a), but with 100% root-mean-squared noise added (1:1 signal-to-noise ratio). (c) The synthetic remnants are small blobs similar to circular disks with ~4 degree radius and occupy the bottom 150 km of the transition zone. (d) The same test as in (c), but with 100% root-mean-squared noise added. 11 Figure S5. Areal extent of fast anomalies in the transition zone for the LLNL-G3D-JPS model (this study), the Savani model (Auer et al. 2014), and the SAW24B16 model (Mégnin and Romanowicz 2000). Each of these models shows similar fast trends in the transition zone along the Southeast Indian Ridge (SEIR). The extent of slab material in the transition zone was determined by mapping all shear wave perturbations of >0.25% for each model layer between 410 and 660 km depth. The color saturation indicates the amount of material at each point (0% means there is no fast material at that location; 100% means the entire depth range is fast). 12 Figure S6. Direct comparison of several global tomography models along cross section 1, in Figure 2A in the main text. The green outlines identify the position of the SEIS anomaly in LLNL-G3D-JPS model (developed in this study). The models are SAW642ANB (Panning et al. 2010), Smean (Becker and Boschi 2002), Grand2002 (a revision to Grand 2002), SEMum (Lekić and Romanowicz 2011), S362WMANI (Kustowki et al. 2008), GyPSuM (Simmons et al. 2010), HMSL (Houser et al. 2008), SAW24B16 (Mégnin and Romanowicz 2000), Savani (Auer et al. 2014), S20RTS (Ritsema et al. 1999), S40RTS (Ritsema et al. 2011), Zhao2013 (Zhao et al. 2013), MITP08 (Li et al. 2008). 13 Figure S7. Direct comparison of several global tomography models along cross section 2, in Figure 2A in the main text. The green outlines identify the position of the SEIS anomaly in LLNL-G3D-JPS model (developed in this study). Model references are listed in Figure S6. 14 Figure S8. Direct comparison of several global tomography models along cross section 3, in Figure 2A in the main text. The green outlines identify the position of the SEIS anomaly in LLNL-G3D-JPS model (developed in this study). Model references are listed in Figure S6. 15 Figure S9. The effects of P- and S-wave data. We performed global inversions with individual P- and S-wave datasets to evaluate the effects of jointly inverting the data with scaling relationships coupling the data. Some elements of the slab anomalies are visible when either dataset is excluded in the inversion, but when combined, the result is a more focused set of slab-like features. Note that the P-wave only model is converted to S-wave anomalies with the ascribed scaling relationship. The cross sections are in the same location as those shown in the main text (cross sections 1, 2 and 3 in the southern Indian Ocean). 16 Figure S10. The effects of the Bayesloc multiple-event relocation process. We performed more “traditional” relocation of seismic events without the benefit of multipleevent constraints. We refer to these locations as “single-event” locations since they are located individually. The slab anomalies are still clearly visible when both P and S datasets are used jointly, however the multiple event location process sharpens the image to make the features look even more slab-like (compare to 3 cross sections in the main text). 17 Figure S11. The effects of 3-D ray tracing. We performed the imaging process assuming ray paths based on a 1-D model rather than the full 3-D ray tracing as was used to construct the LLNL-G3D-JPS model. The 3-D ray tracing focuses the slab anomalies, but the features are not dramatically impacted overall. The cross sections are in the same location as those shown in the main text (cross sections 1, 2 and 3 in the southern Indian Ocean). 18 Figure S12. The effects of the PMTI multi-resolution imaging process. The PMTI approach allows for broad anomalies to be constructed where data are limited and more refined and detailed images when there is sufficient data available. The PMTI process only requires a single damping term, but does not require any other form of regularization such as smoothing since it is naturally regularizing. For comparison, we performed a more traditional inversion using a 2nd order smoothing operator. PMTI constructs sharper slab-like anomalies while the smoothing tends to smear out the structures. The cross sections are in the same location as those shown in the main text (cross sections 1, 2 and 3 in the southern Indian Ocean). 19 Figure S13. Data coverage (hitcount) along the cross from Kerguelen to Indonesia (cross section 1 in the main text). While there are several other phases used to construct the model, P, S, and SS are the most significant. There are numerous events along the SEIR that sample the slab anomaly and are recorded in East and Southeast Asia. In addition, a large number of rays arrive at the Kerguelen island station from events in Asia (near the 3rd black circle from the left). 20 Figure S14. Data coverage (hitcount) along the cross from the southern Indian Ocean through western Australia (cross section 2 in the main text). Similarly to cross section 1, many events from the SEIR sample the slab structure. 21 Figure S15. Data coverage (hitcount) along the cross from the southern Indian Ocean through eastern Australia (cross section 3 in the main text). Similarly to cross section 1, many events from the SEIR sample the slab structure. 22 Figure S16. SS ray paths projected to the surface. The paths are shown as thin black lines, events are shown as blue circles and stations are green triangles. The SS paths crisscross throughout the southeast Indian Ocean region providing relatively even mantle coverage compared to direct P and S phases. 23 Figure S17. The effects of choice of 𝑅𝑃/𝑆 scaling relationship. We evaluated the effect of scaling by performing several inversions with constant scaling throughout the whole mantle. Although there is expected to be a depth dependence (similar to the scaling shown in Figure S2), constant scaling factors yield very similar images. In this semiconstrained inversion, the image does not rely heavily on the imposed scaling as long as mineral-physically reasonable values are assumed. 24 Phase Number of Arrivals P 2,553,180 Pn 266,882 PcP 34,031 pP 53,872 pwP 35,496 Pg 10,774 Pb 5,754 S* 20,728 Sn 76,183 SS* 17,835 ScS* 2,699 SKS* 5,642 SKKS* 2,605 sS* 1,463 *Waveform correlation picks Data Fit with AK135 (standard deviation, s) 1.10 1.85 1.71 2.22 1.93 1.28 1.87 2.97 5.15 4.81 3.78 2.62 3.47 3.38 Data Fit with LLNL-G3D-JPS (standard deviation, s) 0.75 1.22 1.01 1.40 1.49 1.11 1.18 1.87 3.54 2.91 2.09 1.51 1.66 2.72 Table S1. Arrival time data used in this study and data fits. 25