92341_0_art_file_696241_n4dqt1 141030
advertisement

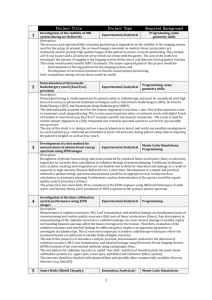
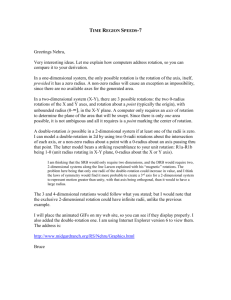
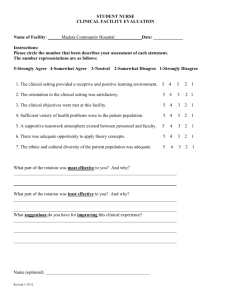
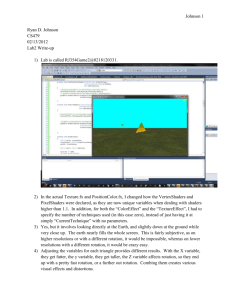
Appendix A1: Definition and Properties of the Radiation Isocentre A1.1. Introduction The definition of the radiation isocentre presented here is based on pure geometrical considerations. It 5 is assumed that the focus is fixed relative to the gantry head. A1.2. Material and Methods: The definition of the radiation isocentre follows in principle that of Keynes10 and Skworcow et al28: The radiation isocentre sphere includes all lines connecting the isocentre path points with the corresponding beam focus positions. The radiation isocentre is the centre of the radiation isocentre sphere. 10 This definition does not depend on a potentially error-prone calibration of the field shaping collimators. The properties of the radiation isocentre following the definition above are investigated on the basis of the measurement series described in 2.4.2. A1.3. Results: 15 The migration of the mechanical isocentre on its path implicates that the isocentre lines which connect the isocentre path points with their corresponding beam focus positions - exhibit no mutual intersection. This can be shown in figure A1. 1 2 H. Schiefer et al Figure A1. Interpolated Isocentre path points and isocentre lines for machine 1, 3rd measurement as an 20 example. The isocentre lines connect the focus positions (placed outside the image frame) with the corresponding isocentre path points. Due to the limited manufacturing accuracy and gravity effects, the assumed beam focus position deviates from its theoretical value. But the deviation is small compared to the focus to isocentre distance. In the region of the isocentre, the error in the construction of the isocentre lines is therefore negligibly 25 small with respect to the path dimensions. The parameters calculated for the radiation isocentre sphere are listed as in Skworcow et al. 28 x and y describe the position of the radiation isocentre. r is the radius of the isocentre sphere. 10 machine 1 paths cw mean standard dev. paths ccw mean standard dev. all paths mean standard dev. machine 2 x [mm] y [mm] r [mm] x [mm] y [mm] r [mm] -0.017 -0.050 0.683 0.015 0.023 0.806 0.017 0.024 0.018 0.028 0.012 0.009 -0.021 -0.047 0.679 0.026 0.010 0.807 0.008 0.024 0.023 0.023 0.019 0.015 -0.019 -0.049 0.681 0.020 0.017 0.806 0.014 0.024 0.021 0.026 0.017 0.012 Table A1. x and y coordinates of the radiation isocentre and radii r of the radiation isocentre spheres. 30 The coordinates are stated relative to the mechanical isocentre. Independent of the machine and direction of rotation, there is no relevant difference between the coordinates of the mechanical and radiation isocentre. The mean radii of the radiation isocentre spheres are 0.681 mm ± 0.021 mm for machine 1 and 0.806 mm ± 0.012 mm for machine 2, respectively. These values are slightly larger than the radii of the circles approximating the isocentre paths, which are 35 0.634 mm ± 0.005 mm for machine 1 and 0.725 mm ± 0.008 mm for machine 2. A1.4. Discussion: Isocentre Characteristics of the Gantry Rotation Axis A1 suggests that the isocentre lines focus in three points outside the isocentre path. A graphical representation in figure A2 of a theoretical double loop with 128 path points confirms the conjecture. The isocentre lines do not intersect at the geometric isocentre, but at three points outside the isocentre path. 40 510 Figure A2: Course of the isocentre lines for 128 path points. The isocentre lies in the coordinate origin. The radius of the isocentre path is assumed to be one arbitrary unit. 45 515 When the isocentre path forms a double loop, a “1-2-3 rule” seems to be valid: When the gantry is turned once, the isocentre path rotates twice in the inverse direction of rotation, and the isocentre lines intersect at three points which form a regular triangle. The isocentre is always in the centre of the considered geometrical structures. In practice, the splitting of the radiation isocentre is only relevant when very small fields are applied. It has to be noted that the isocentre lines of opposing field coincide: 50 When the gantry performs a semi rotation, the isocentre performs a full rotation. The definition of the radiation isocentre is purely derived from geometrical considerations, ignoring a 520 potential migration of the beam focus with respect to the gantry head which is assumed to be rigid. This allows strongly segregating the mechanical properties from the gantry rotation for characteristics of the beam generating system. 55 3 4 H. Schiefer et al A2: The Isocentre Movement in Parallel to the Gantry Rotation Axis A.2.1. Introduction The measurement method presented in the main article is not suitable to detect an isocentre displacement parallel to the gantry rotation axis. But, when the distance between the marker platelet and the 60 smartphone is changed, the relative distance of two markers in the image is changed, too. This allows calculating the relative displacement of the isocentre in parallel to the gantry rotation axis. A2.1 Material and Methods: Let d1 and d2 be two different distances between the marker platelet and the smartphone. The corresponding distances between two markers in the image are B1 and B2, respectively. The displacement 65 can then be expressed with formula (A1): 𝐵 ∆= 𝑑2 − 𝑑1 = 𝑑1 ∙ ( 𝐵2 − 1) 1 (A1) In order to investigate the isocentre movement in parallel to the gantry rotation axis, the measurement series presented in 2.4.1. has been used. It was checked whether the image quality is sufficient to calculate the displacement parallel to the 70 gantry rotation axis as a function of gantry angle. In order to increase the measurement accuracy, the sum of all twelve marker pair distances was used as a measure for d1 or d2 and described depending on the gantry angle. The isocentre movement in parallel to the gantry rotation axis is investigated on the basis of the measurement series described in 2.4.1. 75 A2.2. Results: Figure A3 shows the isocentre displacement along the gantry rotation axis relative to its mean displacement. Two measurements for ds,m = 400 mm and ds,m = 150 mm are presented for machine 1 as two examples. Obviously, the displacement follows a single oscillation when the gantry completes one 5 Isocentre Characteristics of the Gantry Rotation Axis full rotation. When the gantry angle is 0° or ±180°, the isocentre displacement exhibits its maximum 80 deviation from the mean position. Figure A3. Isocentre displacement in parallel to the gantry rotation axis when the smartphone to marker platelet distance is 400 mm and 150 mm. As a consequence of formula A1, the difference between measurement and fit becomes smaller when ds,m becomes smaller. 85 A cosine function was fitted to the measurement points. The amplitude, the phase shift and the period were used as fitting parameters. The amplitude is a measure for the isocentre stability along the gantry rotation axis. As shown in table A2, the mean amplitude is 0.505 mm ± 0.018 mm for machine 1, and 0.404 mm ± 0.022 mm for machine 2. ds,m machine 1 machine 2 distance [mm] [mm] [mm] 400 0.490 0.426 350 0.485 0.356 300 0.489 0.406 250 0.529 0.409 200 0.510 0.412 150 0.527 0.416 mean 0.505 0.404 standard deviation 0.018 0.022 Table A2. Amplitude of the isocentre oscillation in parallel to the gantry rotation axis. 90 6 H. Schiefer et al A2.3 Discussion: The quality of the smartphone images allows registering the isocentre oscillation along the gantry rotation axis. Its amplitude is about 1 mm and therefore comparable to the diameter of the isocentre path which is 1.2 mm and 1.4 mm for the considered machines. 95 A3: Further Application based on the Presented Measurement Principle It is obvious that the measurement method is applicable to the collimator rotation axis relative to the lateral lasers, when the gantry angle is 90° or 270°. The absolute position of the mechanical isocentre and its path relative to the lasers are then defined in three dimensions. Measurements have shown 100 that the isocentre path of the collimator rotation is not reproducible. But, due to its small extent in the range of less than 0.2 mm, this property is not relevant in practice. Additionally, when the marker platelet is fixed according to the optical field graticule, its location may be measured with respect to the isocentre of the collimator rotation axis. Due to lack of space, these issues are not treated in this article. 105 The non-contact nature of the measurement would allow its use for further application areas, such as: Definition of the isocentre path and isocentre of the collimator and table rotation of a linear accel- 575 erator. The marker plate consists of radio opaque markers. The EPID serves as imaging system. Definition of the head orientation and mechanical isocentre of gamma cameras Precession measurement of the Earth's axis by means of photographs of the night-sky in the pre- 110 sumed vicinity of the extension of the earth’s axis. The imaging system is then fixed rigidly with the earth. 580 Measurement of the rotational axis of very rapidly rotating bodies using high-speed stroboscopic photography. Isocentre Characteristics of the Gantry Rotation Axis 115 A4: Comparison with a Frontpointer Equivalent Measurement Method A.4.1. Introduction An established method for accessing the mechanical isocentre characteristics without influence of the radiation beam properties had to be used for comparison. The conventional front pointer method gives information about the isocentre position. But, due to the large extent of the front pointer tip compared 120 to the dimensions of interest, the conventional front pointer method is not suitable to define the isocentre path. It has therefore been adapted. A.4.2. Material and Methods The gantry angle was set to -180°. At the position of the laser intersection, a platelet with a small sheet of scale paper has been fixed on the front pointer rod: Instead of the front pointer pin, the intersection 125 of two main scale lines has been aligned to the laser cross (figure A4). The scale paper allows describing each point in the neighbourhood of the assumed isocentre position with sufficient accuracy. Figure A4 : A small sheet of graph paper is aligned with the lasers. The laser intersection coincides with two main scale lines. In order to emphasize the identity of the “scale paper” method with the tra130 ditional front pointer method, the in house front pointer is overlaid in the image. A digital camera (Canon G12, Canon Inc., Tokyo, Japan) was fixed on the treatment table with its optical axis in parallel to the expected gantry isocentre line. The distance of the camera to the graph 7 8 H. Schiefer et al paper was as small as possible. Images were taken for a full gantry rotation at constant 20° angle intervals. They have been evaluated with the software “Photoshop Elements”, version 10 (Adobe Sys135 tems Incorporated, San Jose, California, USA). For this purpose, the image coordinate (arbitrary units) of three points have been defined in all images (main scale line intersection, and two points, 1 mm right and above this point, respectively). The accuracy was better than 0.02 mm. Similar to the mathematical formalism presented in the main text of this article; each arbitrary point in the graph paper can be described with two vectors derived from these points (and physically plotted on the graph pa- 140 per), and therefore tracked in the images. Again, the isocentre path is determined by the point on the graph paper that exhibits the smallest path. The manual positioning of the platelets has the largest influence on the accuracy when the mechanical isocentre position has to be defined relative to the laser cross. In order to access the error of the front pointer method, the platelets were manually positioned alternately with respect to the laser cross for 145 eight times. Three measurements were conducted with the marker as well as the graph paper platelet method for machine 1. The platelets were repositioned manually before each measurement. A.4.3. Results When the marker and the scale paper platelet are manually positioned relative to the lasers, the stand- 150 ard deviation of the coordinates x and y is 0.3 mm. This has to be beard in mind when table A3 is interpreted. It shows the main parameters of the measured isocentre positions (x and y) and the path diameters. mmt 1 mmt 2 mmt 3 "front pointer" method path diam. x [mm] y [mm] [mm] -0.03 0.37 1.27 0.04 0.16 1.28 -0.04 0.27 1.28 "isoPath" method path diam. x [mm] y [mm] [mm] -0.02 0.04 1.21 0.11 0.11 1.19 -0.04 -0.09 1.22 Table A3. Isocentre path parameter defined with the “front pointer” and the “isoPath” measurement method Isocentre Characteristics of the Gantry Rotation Axis 155 The differences of the isocentre coordinates are in the range of the manual positioning of the marker platelets. Figure A5 shows the mean isocentre path which was defined with both measurement methods. Figure A5. Isocentre path parameter defined with the “front pointer” and the “isoPath” measurement 160 method. The mean difference for the y coordinates of the corresponding isocentres is 0.21 mm. The shape and diameter of the paths are comparable. It serves as prove that the presented method is equivalent to the traditional front pointer method. Defining the isocentre and its path in a quantitative, accurate and time saving way is now possible. A.4.4. Discussion 165 It has been shown that the presented method is equivalent to the traditional front pointer method, but, in contrast to it, allows defining the isocentre and its path in a quantitative, accurate and time saving way. The measurement accuracy can be increased when the laser position is defined optically with respect to the centre marker. It is therefore intended to include this option in the isoPath application and there- 170 fore accelerating the setup procedure before the measurement is started. We expect that the definition of the laser cross will be better than 0.1 mm. At the same time, the acquisition time will further be reduced. 9