1
Auxiliary Material
2
Determination of smoothing parameter for line source CMT and finite source model
3
To determine the line location and azimuth and the critical smoothing parameter λ in (1) we
4
invert for multiple combinations of line geometries by varying the center of the line source, its
5
azimuth and depth. The line source geometry that minimizes misfit in the L1 sense is the best
6
solution. Because this inversion is computationally simple we can perform thousands of such
7
inversions without a large computational overhead and without any assumptions required about
8
the geometry of the source. A single line inversion takes ~0.4s on a single 2.5 GHz processor so
9
the number of line sources computed in this process must be determined a priori based on
10
computational resources available for a particular monitoring network. The smoothing parameter
11
λ determines the roughness of the model [Hansen, 2010] and thus controls the complexity of the
12
inversion results. It is critical to have an objective way of determining λ so that no user
13
interaction is required during an event. For this purpose we compute the tradeoff curves of data
14
misfit ||WGm-Wd|| versus model semi-norm ||Lm|| (L-curves) for all values of λ (Figure fs1a) and
15
their optimal corners from their point of maximum curvature [Hansen et al., 2007; Hansen,
16
2010] for all possible source geometries. We then compute the non-parametric kernel smoothing
17
density estimate of the probability density function (pdf) [Bowman and Azzalini, 1997] for all
18
values (Figure fs1a). We select the mode of the resulting pdf as the preferred smoothing
19
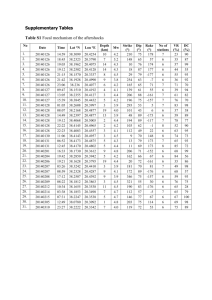
parameter λ*. Then, we compare the misfit of all inversions at the λ* optimum smoothing level
20
and, as in the point source fastCMT method, select the one with the smallest misfit.
21
For the finite slip inversion we use Laplacian smoothness as L in Equation (1). An optimal
22
smoothing parameter λ* is determined from the maximum curvature of the L-curve (Figure fs2),
23
as in the line source CMT solution.
24
Finite slip inversion of only GPS data
25
Figure fs3, referred to in the main manuscript, shows the line-source fastCMT approach and
26
slip inversion just using the GPS data for the same stations to investigate any improvements with
27
seismogeodetic data.
28
References
29
Bowman, A. W., and A. Azzalini (1997), Applied Smoothing Techniques for Data Analysis. pp.
30
31
25-45, Oxford University Press, New York., NY.
Hansen, P.C., T.K. Jensen and G. Rodriguez (2007), An adaptive pruning algorithm for the
32
discrete
33
10.1016/j.cam.2005.09.026
34
35
L-curve
criterion,
J.
Comput.
Appl.
Math,
198,
483-492
doi:
Hansen, P.C., (2010), Discrete Inverse Problems: Insights and Algorithms, pp. 85-105, SIAM,
Philadelphia, PA.
36
Figure Captions
37
Figure fs1. (a) 3800 L-curves for line source fastCMT inversions performed at different
38
locations and with different orientations. Orange crosses depict the corners of each curve
39
computed from the maximum curvature. (b) Probability density functions of the smoothing
40
parameter that corresponds to the L-curve corners. The optimum smoothing parameter λ* is
41
selected from the mode of the pdf.
42
Figure fs2. (a) L-curve for the seismogeodetic slip inversion plotting the model seminorm
43
||Lm||2 versus model misfit ||WGm-Wd||2 with solutions at selected values of the smoothing
44
parameter λ plotted as red stars. Also plotted is the curvature κ of the L-curve, the optimum
45
smoothing parameter λ* is selected as the value that corresponds to the maximum curvature
46
(blue star). (b) L-curve and its curvature for the GPS-only slip inversion.
47
Figure fs3. fastCMT and slip inversion results for the GPS-only displacements. Green circles are
48
the point sources superimposed to compute the line source, the final averaged solution shown as
49
fastCMT, and the Global CMT solution shown for comparison. The inset shows the moment
50
release from the line source of CMTs as a function of distance along fault. Shown along the fault
51
interface with 10 km depth contours from the Slab 1.0 model (Hayes et al., 2012) is the result of
52
the slip inversion, the blue lines represent the direction of slip. The triangles indicate the
53
locations of all the GPS stations used for computing the CMT solution and slip inversion. The
54
two large triangles represent the fixed GPS station (0848) and the GPS/accelerometer pair
55
(0914/MYG003).
 0
0