UNIVERSITY OF PITTSBURGH
Pressurizer (PPZ) Design
Basis Document
SIMULINKTM Thermal Hydraulic Model
Thomas L Meikle V
3/28/2011
0
PPZ Model
Table of Contents
X.1
Model PPZ ........................................................................................................................................ 2
X.1.1
System Scope of Simulation ..................................................................................................... 2
X.1.1.1
Simulation Description ......................................................................................................... 2
X.1.1.2
Equipment and Functions Not Simulated ............................................................................. 2
X.1.2
Software Communication and Hierarchy Diagram ................................................................... 2
X.1.3
Mathematical Description ......................................................................................................... 2
X.1.3.1
Model Description................................................................................................................. 3
X.1.3.2
Assumptions and Approximations ........................................................................................ 3
X.1.3.3
Description of Equations ....................................................................................................... 3
X.1.3.4
Definition of Variables.......................................................................................................... 4
X.1.3.5
Malfunctions ......................................................................................................................... 4
X.1.4
Constants Derivation ................................................................................................................. 4
X.1.5
GUI Interfaces ........................................................................................................................... 4
X.1.5.1
Screen Displays ..................................................................................................................... 5
X.1.5.2
Screen Controls ..................................................................................................................... 6
X.1.6
Program Description and SIMULINKTM model ....................................................................... 6
X.1.6.1
SIMULINKTM Model ............................................................................................................ 6
X.1.6.2
MATLABTM Functions ......................................................................................................... 6
X.1.7
References ................................................................................................................................. 8
Appendix A………………………………………………………………………………………………9
Appendix B……………………………………………………………..………………………………10
Appendix C………………………………………………………………………..……………………11
1
PPZ Model
X.1
Model PPZ
This section documents the development of a SIMULINKTM based thermal hydraulic model for
Pressurized Water Reactor (PWR) Pressurizer (PPZ).
X.1.1 System Scope of Simulation
The scope of the PPZ simulation includes the development of the physics involved in the simulation of
pressurizer behavior to due to transient loading conditions.
X.1.1.1 Simulation Description
The PPZ model provides transient responses to changes in surge line mass flow rate and energy, spray
line mass flow rate and enthalpy, pressurizer relief valve operation, as well as PPZ heater input. PPZ
pressure and level are the corresponding outputs.
X.1.1.2 Equipment and Functions Not Simulated
The boundary conditions for the PPZ model are the inlets and outlets to the PPZ lower and upper heads.
Therefore, the surge line, spray line, and safety relief piping are not included in this model. That also
implies that spray line and relief line valve operations are not modeled as well. The inputs to the model
are physical quantities like flow and enthalpy, the values of these inputs which include consideration of
the appropriate valve statuses are calculated in other parts of the PANTHER simulation model.
X.1.2 Software Communication and Hierarchy Diagram
X.1.3 Mathematical Description
The three governing equations for the PPZ model simulation include conservation of mass (1),
conservation of energy (2), and the conservation of total volume (3). These equations are represented by
the following mathematical expressions:
𝑑
(𝑚
) = 𝑚̇𝑠𝑢𝑟𝑔𝑒 + 𝑚̇𝑠𝑝𝑟𝑎𝑦 − 𝑚̇𝑟𝑒𝑙𝑖𝑒𝑓
𝑑𝑡 𝑡𝑜𝑡𝑎𝑙
(1)
𝑑
𝑑
(𝑄𝑡𝑜𝑡𝑎𝑙 ) = 𝑚̇𝑠𝑢𝑟𝑔𝑒 ℎ𝑠𝑢𝑟𝑔𝑒 + 𝑚̇𝑠𝑝𝑟𝑎𝑦 ℎ𝑠𝑝𝑟𝑎𝑦 + 𝑄̇ℎ + 𝑝 (𝑉𝑡𝑜𝑡𝑎𝑙 )
𝑑𝑡
𝑑𝑡
𝑑
𝑑
(𝑉𝑡𝑜𝑡𝑎𝑙 ) = (𝑉𝑣 + 𝑉𝑙 ) = 0
𝑑𝑡
𝑑𝑡
(2)
(3)
Where,
𝑚𝑡𝑜𝑡𝑎𝑙 = 𝑡𝑜𝑡𝑎𝑙 𝑃𝑃𝑍 𝑚𝑎𝑠𝑠
𝑚̇𝑠𝑢𝑟𝑔𝑒 = 𝑠𝑢𝑟𝑔𝑒 𝑙𝑖𝑛𝑒 𝑚𝑎𝑠𝑠 𝑓𝑙𝑜𝑤 𝑟𝑎𝑡𝑒
𝑚̇𝑠𝑝𝑟𝑎𝑦 = 𝑠𝑝𝑟𝑎𝑦 𝑙𝑖𝑛𝑒 𝑚𝑎𝑠𝑠 𝑓𝑙𝑜𝑤 𝑟𝑎𝑡𝑒
𝑚̇𝑟𝑒𝑙𝑖𝑒𝑓 = 𝑟𝑒𝑙𝑖𝑒𝑓 𝑙𝑖𝑛𝑒 𝑚𝑎𝑠𝑠 𝑓𝑙𝑜𝑤 𝑟𝑎𝑡𝑒
𝑄𝑡𝑜𝑡𝑎𝑙 = 𝑡𝑜𝑡𝑎𝑙 𝑃𝑃𝑍 𝑒𝑛𝑒𝑟𝑔𝑦
ℎ𝑠𝑢𝑟𝑔𝑒 = 𝑠𝑢𝑟𝑔𝑒 𝑙𝑖𝑛𝑒 𝑒𝑛𝑡ℎ𝑎𝑙𝑝𝑦
ℎ𝑠𝑝𝑟𝑎𝑦 = 𝑠𝑝𝑟𝑎𝑦 𝑙𝑖𝑛𝑒 𝑒𝑛𝑡ℎ𝑎𝑙𝑝𝑦
𝑄̇ℎ = 𝑃𝑃𝑍 ℎ𝑒𝑎𝑡𝑒𝑟 𝑖𝑛𝑝𝑢𝑡
𝑝 = 𝑃𝑃𝑍 𝑝𝑟𝑒𝑠𝑠𝑢𝑟𝑒
𝑉𝑡𝑜𝑡𝑎𝑙 = 𝑡𝑜𝑡𝑎𝑙 𝑃𝑃𝑍 𝑣𝑜𝑙𝑢𝑚𝑒
𝑉𝑙 = 𝑃𝑃𝑍 𝑙𝑖𝑞𝑢𝑖𝑑 𝑣𝑜𝑙𝑢𝑚𝑒
𝑉𝑣 = 𝑃𝑃𝑍 𝑣𝑎𝑝𝑜𝑟 𝑣𝑜𝑙𝑢𝑚𝑒
2
PPZ Model
X.1.3.1 Model Description
The PPZ model uses a combination of MatLab functions, thermodynamic property lookup, and
SIMULINKTM modeling to perform the required calculations to provide the PPZ transient response to
various inputs.
X.1.3.2 Assumptions and Approximations
The PPZ model developed herein is single region equilibrium model. That implies that the PPZ
conditions are always at saturation.
X.1.3.3 Description of Equations
The equations described in Section X.1.3 are the governing equations for the behavior of the PPZ model.
In order to programmatically sole these equations, further simplification and analysis is required.
Equation (3) can be written so that the change in PPZ liquid volume is equal and opposite to the PPZ
vapor volume. This is shown below:
𝑑
𝑑
(𝑉𝑡𝑜𝑡𝑎𝑙 ) = (𝑉𝑣 + 𝑉𝑙 ) = 0
𝑑𝑡
𝑑𝑡
(3)
𝑉̇𝑙 = −𝑉𝑣̇ (4)
Equation (1) can be written in terms of density and volume as shown below, it is assumed that PPZ relief
mass flow rate is assumed to be zero.
𝑑
(𝑚
) = 𝑚̇𝑠𝑢𝑟𝑔𝑒 + 𝑚̇𝑠𝑝𝑟𝑎𝑦 − 𝑚̇𝑟𝑒𝑙𝑖𝑒𝑓
𝑑𝑡 𝑡𝑜𝑡𝑎𝑙
(1)
𝑚𝑡𝑜𝑡𝑎𝑙 = 𝜌𝑙 𝑉𝑙 + 𝜌𝑣 𝑉𝑣
𝑑
𝑑
𝑑
(𝑚𝑡𝑜𝑡𝑎𝑙 ) = 𝜌𝑙 𝑉𝑙 + 𝜌𝑙 𝑉̇𝑙 + 𝜌𝑣 𝑉𝑣 + 𝜌𝑣 𝑉𝑣̇
𝑑𝑡
𝑑𝑡
𝑑𝑡
(5)
The next step is to linearize the liquid and vapor density with respect to pressure. This allows the
reduction of the unknown variables to the change in pressure and the change in PPZ liquid and vapor
volume with respect to time. Also using equation (4), equation (5) can further be reduced to only
functions of the change pressure and the change in PPZ liquid volume with respect to time. The
linearization is shown below:
𝑑𝜌𝑙
𝑑𝑡
=
𝑑𝜌𝑙 𝑑𝑝
𝑑𝑡 𝑑𝑡
= 𝜌𝑙́ 𝑝̇ &
𝑑𝜌𝑣
𝑑𝑡
=
𝑑𝜌𝑣 𝑑𝑝
𝑑𝑡 𝑑𝑡
= 𝜌𝑣́ 𝑝̇
Where,
𝜌́ 𝑙 = 𝛥𝜌𝑙 /𝛥𝑡
𝜌́ 𝑣 = 𝛥𝜌𝑣 /𝛥𝑡
𝑝̇ = 𝛥𝑝/𝛥𝑡
3
PPZ Model
Using the above equations and equation (4), the following conservation of mass equation can be derived.
𝑑
(𝑚
) = (𝜌́ 𝑙 𝑉𝑙 + 𝜌́ 𝑣 𝑉𝑣 )𝑝̇ + (𝜌𝑙 − 𝜌𝑣 )𝑉̇𝑙
𝑑𝑡 𝑡𝑜𝑡𝑎𝑙
(6)
A similar derivation is repeated for the conservation of energy equation. The derivation is shown below:
𝑑
𝑑
(𝑄𝑡𝑜𝑡𝑎𝑙 ) = 𝑚̇𝑠𝑢𝑟𝑔𝑒 ℎ𝑠𝑢𝑟𝑔𝑒 + 𝑚̇𝑠𝑝𝑟𝑎𝑦 ℎ𝑠𝑝𝑟𝑎𝑦 + 𝑄̇ℎ + 𝑝 (𝑉𝑡𝑜𝑡𝑎𝑙 )
𝑑𝑡
𝑑𝑡
(2)
𝑚𝑡𝑜𝑡𝑎𝑙 = 𝜌𝑙 𝑉𝑙 ℎ𝑙 + 𝜌𝑣 𝑉𝑣 ℎ𝑣
𝑑
(𝑄
) = (𝜌́ 𝑙 𝑉𝑙 ℎ𝑙 + 𝜌́ 𝑣 𝑉𝑣 ℎ𝑣 + 𝜌𝑙 𝑉𝑙 ℎ́𝑙 + 𝜌𝑣 𝑉𝑣 ℎ́𝑣 )𝑝̇ + (𝜌𝑙 ℎ𝑙 − 𝜌𝑣 ℎ𝑣 )𝑉̇𝑙
𝑑𝑡 𝑡𝑜𝑡𝑎𝑙
(7)
Where,
ℎ́𝑙 = 𝛥ℎ𝑙 /𝛥𝑡
ℎ́𝑣 = 𝛥ℎ𝑣 /𝛥𝑡
Equations (6) and (7) now are functions of the two unknowns 𝑝̇ and 𝑉̇𝑙 which can be solved
simultaneously.
X.1.3.4 Definition of Variables
There are five input variables that are needed, these include:
ṁsurge = surge line mass flow rate
ṁspray = spray line mass flow rate
hsurge = surge line enthalpy
hspray = spray line enthalpy
Q̇ h = PPZ heater input
The output variables include 𝑝̇ and 𝑉̇𝑙
X.1.3.5 Malfunctions
No known malfunctions exist.
X.1.4 Constants Derivation
The constants…
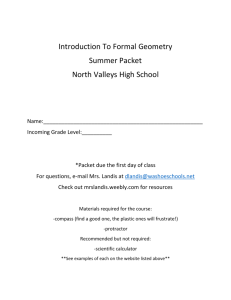
X.1.5 GUI Interfaces
The PPZ GUI is shown in the following figure.
4
X.1.5.1 Screen Displays
The PPZ GUI is shown in the following figure.
Figure X.1.5.1-1: PPZ GUI Screen
5
X.1.5.2 Screen Controls
X.1.6 Program Description and SIMULINKTM model
The PPZ model uses a combination of MatLab functions, thermodynamic property lookup, and
SIMULINKTM modeling to perform the required calculations to provide the PPZ transient response to
various inputs. The different aspects of the model are described in the following subsections
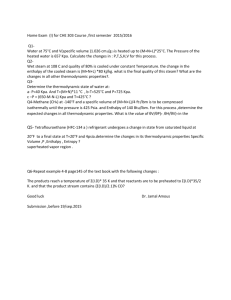
X.1.6.1 SIMULINKTM Model
The SIMULINKTM portion of the PPZ model includes the handling of the time dependent calculations and
input/output variables. From Figure X.1.6.1-1, the inputs and outputs for the PPZ model can be seen.
Figure X.1.6.1-1: SIMULINKTM PPZ Model Schematic
The model receives the inputs on the left from the RCS and PPZ control models. These inputs are then
multiplied by the pressurizer_gain transfer function. The resulting Δp/Δt and ΔV/Δt values are then
integrated in Simulink to provide the desired current pressure and liquid volume.
X.1.6.2 MATLABTM Functions
The first function defined in MATLAB is called “pressurizer_gain”. This function is the primary driver
for the PPZ simulation model. This function recalls the thermodynamic properties from the Xsteam file,
calculates there derivatives for a specific pressure, defines the matrix to be solved, and calculates the
transfer function for the system.
The first section of coding calls the thermodynamic properties from Xsteam. This is done using a function
handle command in MATLAB. The next series of commands calculates the derivative of each required
thermodynamic property as a function of pressure. This is done using the “derive” function defined later
in the file (explained below).
function [B,Z] = pressurizer_gain(p,V1,Vtot,Ti,Ts)
% define the functions for saturated steam
XrhoL_p = @(p)XSteam('rhoL_p',p);
XrhoV_p = @(p)XSteam('rhoV_p',p);
XhL_p = @(p)XSteam('hL_p',p);
6
PPZ Model
XhV_p = @(p)XSteam('hV_p',p);
% note: a 1 indicates liquid and 2 indicates vapor
% compute density, enthalpy, and steam derivatives
dp = 5;
[r1,r1p] = deriv(XrhoL_p,p,dp);
[h1,h1p] = deriv(XhL_p,p,dp);
[r2,r2p] = deriv(XrhoV_p,p,dp);
[h2,h2p] = deriv(XhV_p,p,dp);
hi = XSteam('h_pT',p,Ti);
hs = XSteam('h_pT',p,Ts);
Here PPZ vapor volume (V1) is calculated by subtracting the PPZ liquid volume (V2) from the total PPZ
volume (Vtot).
% compute mass and vapor volume
V2 = Vtot - V1;
Next the governing equation matrix (M) and the constant input matrix (N) are defined.
% setup the matrices
M = [ (r1p*V1+r2p*V2), r1-r2;...
(r1p*V1*h1+r2p*V2*h2+r1*V1*h1p+r2*V2*h2p), (r1*h1-r2*h2) ];
N = [ 1 1 -1 0 ;...
hi, hs, -h2 1 ];
The transfer function for the system (B) is then defined.
B = M\N;
return
end
The other function that is defined is the derivative function (derive) for computing the thermodynamic
properties. The function calls the specific material property value at five psi before and after the specified
pressure in time. The slope from these two points is then computed.
function [y,y_] = deriv(func,x,h)
y = func(x);
y2 = func(x+h);
y1 = func(x-h);
y_ = (y2-y1)/2/h;
return
end
7
PPZ Model
X.1.7 References
1. Matlab
2. Dan Cole
3. Nuclear Systems 1: Thermal Hydraulic Fundamentals
8
PPZ Model
Appendix A
9
PPZ Model
Appendix B
10
PPZ Model
Appendix C
11
 0
0