Davis stem mapping comparison paper
advertisement

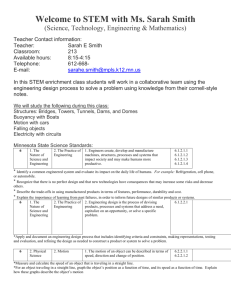
Comparison of LiDAR-derived Stem Maps to Reference Stand and Plot Data R. Davis – 11/8/12 OBJECTIVE To determine which stem mapping method produced the “best” stem map of large diameter trees at two different spatial scales. The result of this test was used to select a stem mapping method for producing a map of large tree densities as a covariate for the purpose of conducting northern spotted owl habitat modeling. STUDY AREA This test was conducted in the HJ Andrews Experimental Forest. Within the study area, three different sources of field data collected for the time period 2006-2010 were used to compare LiDAR-derived stem maps from field-recorded measurements (Fig. 1). LiDAR data was acquired during 2008. Figure 1. Locations of reference stands and plots used for this analysis in the HJ Andrews Experimental Forest. 1 METHODS Stem Mapping Six different stem maps were created using different mapping methods. All methods, except for the uniform spacing, mapped stems for all tree heights based on the LiDAR canopy height model (CHM). The uniform spacing method only mapped stems for the largest trees, which were defined using height-diameter relationship equations from Gray and Miller (2006). For this area, a height of ≥47m was used to define a “large tree”. This height was based on the average heights of the two dominant tree species within the study area, Douglas-fir and western hemlock. An average height of ≥47m correlates with a DBH of 76cm or larger (for the two species). While the uniform spacing method used only LiDAR CHM data at or above this height threshold, the other five methods used the entire LiDAR CHM data set and produced stem maps for trees of multiple heights. From these five methods, a large tree stem map was subsequently created by querying out stems that had heights of ≥47m. A brief description of the six stem mapping methods tested follows: Tree Variable Width – This stem mapping method uses an algorithm developed by Popescu et al. (2002), described fully by Popescu and Wynn (2004) and implemented in the “TreeVaW” software developed by Kinn and Popsecu (2004), which is available for free download at (http://ssl.tamu.edu/personnel/s_popescu/TreeVaW/download.htm). In general, it uses a circular window filter that varies in radius based on a relationship between tree height and crown radii from local data (Garmin et al. 1995). Trees >60m tall used an alternative relationship developed from ‘Tree Variable Width’ output. Within the analysis window, the pixel with the highest value is identified as the stem, and every other pixel within it are assumed to represent LiDAR returns of the same tree crown, and the crown diameter is determined based on an allometric relationship. A half meter CHM was used for this process. Data Resource Management Method - This “in house” tree point identification method was derived with the hopes of identifying as many trees in the canopy as possible without counting large crowns more than once. Using a small focal window will over count larger trees while using a larger window results in a loss of smaller trees. This method tried to minimize this effect by using variable sized windows depending on height. The taller the tree, the larger the window used. The height breaks were derived by trial and error and can be adjusted for different forest types. These were numbers for the Deschutes and weren’t adjusted for the Willamette. The process steps were as follows: 1. Canopy Height Model Generation in Fusion. a. A half meter CHM was generated with a 3X3 median filter applied but preserving the peaks within the filter. 2. Tree Point identification. a. A moving filter of various size identified trees with the following equation: i. If the height of a pixel is between 6 and 50 ft. and it is the highest point within a 1.75 m radius. 2 ii. If the height of a pixel is between 50 and 100 ft. and it is the highest point within a 2.25 m radius iii. If the height of a pixel is between 100 and 130 ft. and it is the highest point within a 2.75 m radius iv. If the height of a pixel greater than 130 ft. and it is the highest point within a 3.25 m radius Uniform Spacing Method – Another “in house” method, this procedure was similar to dot-grid estimation methods for canopy cover. The process was done in a raster environment in ArcGIS. The steps were as follows: 1. Convert 1m resolution CHM into a binary grid for height ≥ 47m (assigns grid value of ‘1’, otherwise ‘0’). 2. Conduct a block statistic for ‘mean’ using 5 pixel radius circle. 3. Convert mean statistic grid into a binary grid for pixels with ≥10% of area with large tree (if ≥10% then’1’, otherwise ‘0’). 4. Resample this binary grid from 1m to 11m (this resolution is based on estimated average large tree crown diameters, based on local knowledge and review of NAIP). 5. Convert resampled pixels that meet these criteria into points (centroid of each cell). Watershed Segmentation (filtered) – A 3X3 neighborhood analysis for mean values was run on the CHM to smooth the surface in an effort to limit identifying false tree stems where odd branch clumping may occur. This process is more likely to affect identification of hardwood trees more so than conifers which typically have a well-defined apex. The rest of the unfiltered segmentation process was followed based on the “smoothed” CHM. Watershed Segmentation (unfiltered) – The CHM was inverted and multiplied by 100 to exaggerate the depressions of “upside down” trees. The hydrology toolset of the Spatial Analyst extension in ArcGIS 10 was used to calculate flow direction and identify the depressions or sinks of the inverted trees. Tree stem points were created for every sink identified. A 3X3 pixel neighborhood analysis was run on the CHM to identify local maximum tree heights. Heights values were then determined for tree stem points with the maximum height raster data set. CanopyMaxima – This FUSION (McGaughey 2012) method used the CHM to identify local maxima using a variable size evaluation window based on the canopy height. According to McGaughey (2012), this method can only identify the dominant and codominant trees in the upper canopy. The algorithm is similar to that reported in Popescu et al. (2002) and Popescu and Wynn (2004) and implemented in the TreeVaW software (Kini and Popescu 2004). Local data on tree height and crown radii were used, and the window size multiplier was set to 0.4 based on visual review of preliminary results using the default setting of 1.0. Plot correlations The products of each of the six stem mapping methods were tested against field data of large (≥76cm DBH) tree stem maps (field located) from reference stands, high elevation plots, and watershed plots. The tally of large trees counted within each stand or plot were correlated to 3 stems, as mapped by the above methods that occurred within the stand or plot at two spatial scales. These spatial scales were as follows: 1. Stand scale – represents a stand of trees ranging from 1 to 2.4 hectares. These data were provided by reference stands that met this area requirement (n= 15). 2. Subplot scale – represents a 0.1ha area. These data consisted of individual subplots from the high elevation plots, and a subset of the watershed plots and reference stands that met this area requirement (n = 111). A Pearson correlation and p-value were calculated for each method at each spatial scale Tree Density Mapping Once the best stem mapping method was determined, a density map of large trees per hectare was created using the ArcGIS Spatial Analyst kernel density procedure and a 90m search radius with an output cell size of 30m. At this spatial output scale (units per hectare) this search radius produced the most accurate density map, when tested against randomly generated 1-ha plots (n=893) with known point (stem) densities (see Fig. 3, pg. 6). Difference in LiDAR total tree estimate from field data RESULTS All stem mapping methods produced reasonable maps with Pearson correlations between 0.703 to 0.709 at the stand-scale and 0.798 to 0.900 at the 1-ha plot scale (see Fig. 4 and 5, pgs. 7 and 8, respectively). I selected the CanopyMaxima method for producing a stem map and large tree density map for habitat modeling purposes. My rationale for this was primarily based on its correlations with field data, which were highest at the reference stand scale (0.748, p<0.002), and second highest at the plot scale (0.857, p<0.001). The CanopyMaxima method also produced overall estimates of total tree numbers across all stands (908 trees) and plots (477 trees) that were close to what was actually mapped on the ground (Fig. 2). 150 100 50 0 -50 -100 -150 -200 -250 TreeVaW DRM Uniform Spacing Wshed (FLT) Wshed (UNFLT) CanopyMaxima Ref Stands -210 -152 -193 -195 -45 28 Plots -61 -27 -69 -63 58 95 Figure 2. Differences in total tree estimates between stem maps and field data. The unfiltered watershed segmentation method was a close second, but did not provide data on crown radii in the outputted stem map. Two methods, TreeVaW and CanopyMaxima, do 4 produce estimates of and outputs for crown radii or widths, a potentially useful addition to the basic location of stems. CanopyMaxima also produces an estimate of height to crown for each stem. An example of a stem map with crown radii buffers is shown in Figure 7 (pg. 10). One outlier reference stand (#20) was field visited during this test, as all six stem maps estimated from 3 to 7 large trees, whereas the field-data showed 35 trees with DBH ≥76cm. All trees were located on the ground and were measured for diameter at breast height, and also total tree height using a laser instrument. Based upon this field review, both stem maps and field data were accurate. The cause for the difference between the stem maps and field data was due to shorter tree heights (<47m) resulting from poor site conditions, and also broken tops in 44% of the large trees. This will be an inherent source of error when producing maps based on height-diameter relationships, which in themselves are estimates (R²=0.963 and 0.968; Table 2 in Gray and Miller 2006). In another reference stand (#26), all stem mapping methods, with the exception of the uniform spacing method, overestimated the number of large trees (26-49 extra stems) from the 81 tallied in the field. This stand has not yet been reviewed in the field. It contains a mix of Douglas-fir and western hemlock. A visual review of 1-m color aerial imagery indicated a very tight and even crown. I suspect this may help explain the error. This stand also occurs on a gentle bench, and another possibility is that the site is very productive with several trees exceeded the height threshold of 47m, but having diameters and breast height that are less than 76cm. The final products, density maps of large trees, were similar in many respects. Not surprisingly, the uniform spacing method produced a more “uniform” density map, whereas the other methods captured pockets of high tree densities better (see Fig. 6, pg. 9). Literature Cited Garman, S.L.; Acker, S.A.; Ohmann, J.L.; Spies, T.A. 1995, Asymptotic height-diameter equations for twenty-four tree species in western Oregon. Forest Research Laboratory, Oregon State University, Corvallis. Research Contribution 10. 22 p. Gray, A.; Miller, C. 2006. Vegetation change in the Blue River landscape study: 1998-2005. Unpublished report on file at USDA Forest Service, 3200 SW Jefferson Way, Corvallis, OR, 97331. Kini, A.U.; Popescu, S.C. 2004. TreeVaw: A versatile tool for analyzing forest canopy Lidar data – a preview with an eye towards future. Kansas City, MO: SPRS Images to Decision: Remote Sensing Foundation for GIS Applications. McGaughey, R.J. 2012. FUSION (v3.21)/LDV: software for LIDAR data analysis and visualization. Unpublished report on file at USDA, Forest Service, Pacific Northwest Research Station, University of Washington, Box 352100, Seattle, WA 98195-2100. Popescu, S.C.; Wynne, R.H.; Nelson, R.F. 2002. Estimating plot-level tree heights with lidar: local filtering with a canopy-height based variable window size, Computers and Electronics in Agriculture, 37(1-3):71-95 Popescu, S.C.; Wynne, R.H. 2004. Seeing the trees in the forest: Using lidar and multispectral data fusion with local filtering and variable window size for estimating tree height. Photogramm. Eng. Remote Sensing, 70:589604. 5 Figure 3. Results of testing various search radii for kernel density mapping at the 1-ha scale. Each cell was 30x30m. The most accurate density map was produced using a 90m search radius (3 cells). 6 Figure 4. Results of the reference stand correlations, showing Pearson correlations (R) and p-values below each plot. Reference stands ranged in area for 1 to 2.4 hectares (n = 15). 7 Figure 5. Results of the 0.1 ha plot correlations (n = 111) showing Pearson correlations (R) and p-values below each plot. 8 Figure 6. Large tree density maps generated from each of the six stem maps. Large trees were defined as ≥47m in height, as measured by LiDAR. Maximum large tree densities mapped are shown below each map. 9 Figure 7. Stem map of large trees (≥47m height) and crown radii buffers as generated by Tree Variable Width. LiDAR data overlay (top); NAIP 2011 overlay (bottom). 10