A-8.2.3_Two_Body_Spiral_Transfer_Brown
advertisement

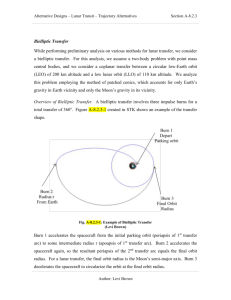
Alternative Designs – Lunar Transit – Trajectory Alternatives Section A-8.2.3 Two-Body Low Thrust Spiral Transfer After selecting electric propulsion as the translunar propulsion system, we develop a model for a low thrust spiral transfer to the moon. For this analysis, we assume a twobody problem with point mass central bodies, and we consider a coplanar transfer from a circular low-Earth orbit (LEO) of 200 km altitude. We analyze this problem employing the concept of the method of patched conics, which only accounts for the spacecraft and an attracting body. When the Earth’s gravity is the primary force on the vehicle, we only include Earth. When the Moon becomes the primary source of gravity, we only include the Moon. Force Definitions. We define the spacecraft as a point mass in the circular parking orbit described above. We describe this configuration in Fig. A-8.2.3-1 below. 𝑇̅ γ ̂ 𝜽 𝒓̂ 𝐹̅𝑔 Fig. A-8.2.3-1: Point Mass in Orbit (Levi Brown) We define 𝑟̂ as the direction from the center of the Earth to the spacecraft. 𝜃̂ is perpendicular to 𝑟̂ and tangential to the motion of the spacecraft. We assume only two Author: Levi Brown Alternative Designs – Lunar Transit – Trajectory Alternatives Section A-8.2.3 forces act on the spacecraft: thrust 𝑇̅ and gravity force 𝐹̅𝑔 . We assume the engine thrusts in the velocity direction at an angle γ from the tangential direction. We define the forces as follows. 𝐹̅𝑔 = −𝐹𝑔 𝑟̂ (A-8.2.3-1) 𝑇̅ = 𝑇 sin 𝛾 𝑟̂ + 𝑇 cos 𝛾 𝜃̂ (A-8.2.3-2) Derive Equations of Motion. We write the position of the spacecraft 𝑅̅ 𝑂𝑃 = 𝑟𝑟̂ (A-8.2.3-3) where r is the distance to the spacecraft from the central body. We take the inertial derivative to find velocity assuming the spacecraft orbits at the rate 𝜃̇. We take the derivative a second time to find spacecraft acceleration. 𝑅̅̇ = 𝑟̇ 𝑟̂ + 𝑟𝜃̇ 𝜃̂ (A-8.2.3-4) 𝑅̅̈ = (𝑟̈ − 𝑟𝜃̇ 2 )𝑟̂ + (𝑟𝜃̈ + 2𝑟̇ 𝜃̇)𝜃̂ (A-8.2.3-5) We redefine the force of gravity where μ is the gravitational parameter and m is the mass of the spacecraft. From Newton’s Second Law, we result in the following equations for the 𝑟̂ and 𝜃̂ directions respectively. 𝐹̅𝑔 = − − 𝜇𝑚 𝑟̂ 𝑟2 𝜇𝑚 + Tsin 𝛾 = 𝑚(𝑟̈ − 𝑟𝜃̇ 2 ) 𝑟2 𝑇 cos 𝛾 = 𝑚(𝑟𝜃̈ + 2𝑟̇ 𝜃̇) (A-8.2.3-6) (A-8.2.3-7) (A-8.2.3-8) By rearranging Eqs. (A-8.2.3-7) and (A-8.2.3-8), we define the equations of motion. Author: Levi Brown Alternative Designs – Lunar Transit – Trajectory Alternatives 𝑟̈ = − 𝜃̈ = 𝜇 𝑇 + sin 𝛾 + 𝑟𝜃̇ 2 𝑟2 𝑚 1 𝑇 ( cos 𝛾 − 2𝑟̇ 𝜃̇) 𝑟 𝑚 Section A-8.2.3 (A-8.2.3-9) (A-8.2.3-10) Initial Conditions. In order to integrate the equations of motion, we must establish the initial conditions for all variables in the equations. Because the spacecraft is initially orbiting in a circular parking orbit, we define ro as the orbit radius and assume the initial angle is zero. The velocity is in the 𝜃̂ direction, which we define as Eq. (A-8.2.3-11). Velocity for the particle can also be written as Eq. (A-8.2.3-12); therefore, we calculate initial 𝜃̇ by rearranging to Eq. (A-8.2.3-13). 𝜇 𝑉=√ 𝑟𝑜 (A-8.2.3-11) 𝑉 = 𝑟̇ 𝑟̂ + 𝑟𝜃̇𝜃̂ (A-8.2.3-12) 𝜃̇𝑜 = 𝑉𝑜 𝑟𝑜 (A-8.2.3-13) We define the following initial conditions. 𝑟𝑜 = 6578.1 𝑘𝑚 (A-8.2.3-14) 𝜃𝑜 = 0 (A-8.2.3-15) 𝑟̇𝑜 = 0 (A-8.2.3-16) 𝜃̇ = 1.2 𝑥 10−3 𝑟𝑎𝑑/𝑠 (A-8.2.3-17) Author: Levi Brown Alternative Designs – Lunar Transit – Trajectory Alternatives Section A-8.2.3 Spiral Out. In order to predict the spiral trajectory of the spacecraft, we numerically integrate the equations of motion with the Matlab codes Spiral_EOM_Script.m, Spiral_Out.m, and Spiral_In.m. Running Spiral_Out.m, which only includes Earth’s gravity, we integrate Eqs. (A-8.2.3-9) and (A-8.2.3-10) for a specified flight time. This integration results in a time history for the four variables r, θ, 𝑟̇ , and 𝜃̇. With the radius and angle, we can create a plot of the resultant spiral trajectory similar to as shown in Fig. A-8.2.3-2. 5 x 10 Lunar Orbit Spiral Trajectory 3 Y Distance (km) 2 1 0 -1 Position at end -2 of integration -3 -4 -3 -2 -1 0 1 X Distance (km) 2 3 4 5 x 10 Fig. A-8.2.3-2: Spiral Trajectory from Earth (Levi Brown) The final position of the spacecraft depends on the initial spacecraft mass, thrust level, and the time of flight specified. We vary these parameters as required until the spacecraft reaches the Moon’s sphere of influence, which is defined as a distance of approximately 66300 km from the Moon’s center. (Bate) Author: Levi Brown Alternative Designs – Lunar Transit – Trajectory Alternatives Section A-8.2.3 Switching Gravity Models. After reaching the Moon’s sphere of influence, we switch gravity models to include only the Moon. At this point, we thrust in the anti-velocity direction to slow the spacecraft down and capture in lunar orbit. We must determine this velocity relative to the Moon in order to model the spiral in trajectory. Because we assume the Moon’s orbit is circular, the Moon’s velocity can be calculated as follows: 𝑉̅𝑀 = 𝑉𝑀 𝜃̂ (A-8.2.3-18) 𝜇𝐸 𝑟𝑀 (A-8.2.3-19) where Vm is defined as 𝑉𝑀 = √ and rm is the semi-major axis of the Moon of 384400 km. Taking the results of Spiral_Out.m and inserting them into Eq. (A-8.2.3-12) yields the velocity of the spacecraft relative to the Earth (𝑉̅𝑠𝑎𝑡 ). By rearranging Eq. (A-8.2.3-20), we find the velocity of the spacecraft relative to the Moon 𝑉̅𝑟𝑒𝑙 . 𝑉̅𝑀 + 𝑉̅𝑟𝑒𝑙 = 𝑉̅𝑠𝑎𝑡 (A-8.2.3-20) 𝑉̅𝑟𝑒𝑙 = 𝑉̅𝑠𝑎𝑡 − 𝑉̅𝑀 (A-8.2.3-21) Eq. (A-8.2.3-21) results in the velocity relative to the Moon in 𝑟̂ -𝜃̂ coordinates; however, these coordinates remain fixed in the Earth frame. In order to model the spiral in, we must display the integration variables in a Moon-fixed frame; therefore, we establish a new coordinate system: 𝑟̂𝑀 -𝜃̂𝑀 . This means the velocities in Eq. (A-8.2.3-21) must be written in a coordinate system constant in both frames as shown in Fig. A-8.2.3-3. Author: Levi Brown Alternative Designs – Lunar Transit – Trajectory Alternatives Section A-8.2.3 𝑝̂ 𝜃̂ 𝑟̂ θ θ 𝑒̂ Fig. A-8.2.3-3: Coordinate Frame Relationship ̂ ̂ -𝒉 ̂-𝒛̂ and 𝒓̂-𝜽 Between 𝒆̂-𝒑 (Levi Brown) Applying the following transformation matrix, we write 𝑉̅𝑠𝑎𝑡 and 𝑉̅𝑀 in 𝑒̂ -𝑝̂ coordinates and calculate 𝑉̅𝑟𝑒𝑙 . 𝑟̂ 𝜃̂ ℎ̂ 𝑒̂ cosθ -sinθ 0 𝑝̂ sinθ cosθ 0 𝑧̂ 0 0 1 Fig. A-8.2.3-4: Transformation Matrix ̂ ̂ -𝒉 ̂-𝒛̂ and 𝒓̂-𝜽 Between 𝒆̂-𝒑 (Levi Brown) Spiraling out, the spacecraft orbits in a counterclockwise direction resulting in the angular momentum vector pointing out of the page. Spiraling in, the angular momentum vector points into the page. We then relate 𝑟̂𝑀 -𝜃̂𝑀 -ℎ̂𝑀 to 𝑒̂ -𝑝̂ -𝑧̂ as follows. Author: Levi Brown Alternative Designs – Lunar Transit – Trajectory Alternatives Section A-8.2.3 𝑝̂ 𝑒̂ θ2 𝜃̂𝑀 𝑟̂𝑀 Fig. A-8.2.3-5: Coordinate Frame Relationship ̂𝑴 ̂ 𝑴 -𝒉 ̂-𝒛̂ and 𝒓̂𝑴 -𝜽 Between 𝒆̂-𝒑 (Levi Brown) 𝑟̂𝑀 𝜃̂𝑀 𝑒̂ cosθ2 -sinθ2 0 𝑝̂ -sinθ2 -cosθ2 0 𝑧̂ 0 -1 0 ℎ̂𝑀 Fig. A-8.2.3-6: Transformation Matrix ̂𝑴 ̂ 𝑴 -𝒉 ̂-𝒛̂ and 𝒓̂𝑴 -𝜽 Between 𝒆̂-𝒑 (Levi Brown) After reaching the Moon’s sphere of influence, we assume that the Moon is at the same angle θ in its orbit as the spacecraft. For this reason, θ2 is offset from θ by 180 deg. as shown in Fig A-8.2.3-7. 𝜃2 = 𝜋 − 𝜃 Author: Levi Brown (A-8.2.3-22) Alternative Designs – Lunar Transit – Trajectory Alternatives Section A-8.2.3 𝑝̂ M 𝑒̂ 𝑝̂ θ2 θ E 𝑒̂ Fig. A-8.2.3-7: Angles When Switching Models (Levi Brown) We write 𝑉̅𝑟𝑒𝑙 in 𝑟̂𝑀 -𝜃̂𝑀 coordinates using the transformation matrix Fig. A-8.2.3-6. Spiral In. We establish initial conditions in the 𝑟̂𝑀 -𝜃̂𝑀 frame to model the spiral in trajectory. We find the radius from the moon as the difference between the Moon’s radius and the current radius relative to Earth (r). 𝑟̇2𝑜 is the 𝑟̂𝑀 component of 𝑉̅𝑟𝑒𝑙 . Initial θ2o is the same value found per Eq. (A-8.2.3-22). We calculate 𝜃̇2𝑜 with Eq. (A-8.2.3-13) where V is the 𝜃̂𝑀 component of 𝑉̅𝑟𝑒𝑙 and r is the same as found as follows. 𝑟2𝑜 = 𝑟𝑀 − 𝑟 (A-8.2.3-23) Because we thrust in the anti-velocity direction, the equations of motion modify to as follows. 𝜇 𝑇 + sin 𝛾 + 𝑟𝜃̇ 2 2 𝑟 𝑚 (A-8.2.3-24) 1 𝑇 𝜃̈ = (− cos 𝛾 − 2𝑟̇ 𝜃̇) 𝑟 𝑚 (A-8.2.3-25) 𝑟̈ = − Author: Levi Brown Alternative Designs – Lunar Transit – Trajectory Alternatives Section A-8.2.3 Eqs. (A-8.2.3-24) and (A-8.2.3-25) are integrated by running Spiral_In.m. Taking the results from this integration, we develop plots similar to Fig. A-8.2.3-8 for the spiral in toward the Moon. 4 x 10 Moon Spiral In 5 4.5 4 Y Distance (km) 3.5 3 2.5 2 1.5 1 0.5 0 -1 0 1 2 X Distance (km) 3 Fig. A-8.2.3-8: Spiral In Trajectory to Moon (Levi Brown) Putting the entire trajectory together results in Fig. A-8.2.3-9. Author: Levi Brown 4 5 4 x 10 Alternative Designs – Lunar Transit – Trajectory Alternatives Section A-8.2.3 Lunar Orbit Spiral Out Moon Position Spiral In 5 x 10 3 Y Distance (km) 2 1 0 -1 -2 -3 -4 -3 -2 -1 0 1 X Distance (km) 2 3 4 5 x 10 Fig. A-8.2.3-9: Spiral Trajectory from Earth to Moon (Levi Brown) Results. This analysis applies the physics of a particle in orbit to determine the spacecraft trajectory independently of engine properties. By running this analysis, we determine whether a spacecraft of a given mass can accomplish the mission for a given thrust in a given amount of time; however, it does not indicate whether the engine realistically has those performance levels. We perform this analysis iteratively with the propulsion sizing analysis described in section 5.3.3. Once we determine a mass, thrust, and time combination that reaches lunar orbit with the trajectory analysis, we then determine the required spacecraft mass for that time and thrust with the propulsion analysis. When the mass from the propulsion analysis matches the mass from the trajectory analysis, we know we have a realistic system capable of achieving the mission requirements. Author: Levi Brown