A-8.2.1 – Trajectory Alternatives
advertisement

Alternative Designs
Section A-8, Page 1
A-8.0 – Alternative Designs
Author: Solomon Westerman
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 2
A-8.1 – Launch Vehicle Alternative Designs
A-8.2.1 – Launch Vehicles Alternatives
A-8.2 - Lunar Transfer Alternative Designs
A-8.2.1 – Trajectory Alternatives
Hohmann Transfer with Lunar Capture
The first trajectory that we consider for the tranlunar phase is the well-known Hohmann
transfer. A Hohmann transfer consists of two impulsive engine burns, typically carried
out by chemical propulsion systems. The first burn is performed while in a circular orbit
around the Earth, placing the OTV into an elliptical orbit about the Earth. The point at
which the first burn is performed becomes the perigee of this new elliptical orbit. The
second burn of a Hohmann transfer is performed at apogee of the elliptical transfer orbit.
The result is a new circular orbit about the Earth, with a radius equal to the apogee
distance of the previous elliptical orbit. Our second maneuver is modified to include the
ΔV necessary to drop into a circular orbit about the moon. The Hohmann transfer and
lunar capture is illustrated in Fig. A-8.2.1-1. We note the second ΔV is a braking
maneuver to capture into a circular lunar orbit.
Author: Andrew Damon
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 3
ΔV1
ΔV2
Fig. A-8.2.1-1. Earth-Moon Hohmann transfer generated using Satellite Tool Kit
(STK)
(Andrew Damon)
We start with the following assumptions when performing calculations for an EarthMoon Hohmann transfer:
1) Only the Earth and OTV masses are considered in the first maneuver, and only
the Moon and OTV system are considered in the second maneuver, making this
analysis a patched conic approach.
2) The OTV starts in an Earth parking orbit with altitude of 200 km and the final
lunar parking orbit is 110 km.
3) The Earth parking orbit is coplanar with the Moon’s orbit about the Earth.
4) The Moon’s orbit about the Earth is circular.
5) Launch date and phasing are selected such that the spacecraft will reach the moon
at the appropriate time in its orbit.
The total ΔV needed to perform the Hohmann transfer with lunar capture is determined
as follows. First, the circular velocity of the OTV in its Earth parking orbit is determined
in the following equation:
Author: Andrew Damon
Alternative Designs – Lunar Transfer
vc1
Section A-8.2.1, Page 4
earth
rc1
(A-8.2.1-1)
where rc1 is the radius of the OTV Earth parking orbit, and earth is the gravitational
parameter of the earth. Next, the final OTV circular orbit about the moon can be
characterized in the same manner:
vc 2
moon
rc 2
(A-8.2.1-2)
where rc2 is the radius of the OTV lunar circular orbit, and moon is the gravitational
parameter of the moon.
Next, we determine the characteristics of the intermediate elliptic orbit of the Hohmann
transfer. The semi-major axis of the orbit, aT, is found using:
aT
1
(amoon rc1 )
2
(A-8.2.1-3)
where amoon is the semi-major axis of the Moon’s orbit about the Earth.
The eccentricity is found using:
eT 1
rc1
aT
(A-8.2.1-4)
The radius of periapis of the transfer, rp,T is equal to rc1, and the radius of apoapsis is
equal to amoon.
The velocities at periapsis and apoapsis of the ellipse are then calculated using the orbital
energy equation:
2
1
Vp ,T earth
r
p ,T aT
(A-8.2.1-5)
2
1
Va ,T earth
r
a ,T aT
(A-8.2.3-6)
Author: Andrew Damon
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 5
The ΔV for the first maneuver, transferring from Earth parking orbit to the translunar
ellipse, is the difference between the Earth parking orbit circular velocity and the velocity
at periapsis necessary to achieve the desired elliptical orbit. This first ΔV is computed as
follows:
V1 V p ,T Vc1
(A-8.2.1-7)
The second maneuver is analyzed as a hyperbolic approach to the moon.
Before
calculating the ΔV for the maneuver into lunar parking orbit, the spacecraft’s velocity
relative to the moon, V∞, is determined:
V Va ,T Vmoon
(A-8.2.1-8)
where Vmoon is the orbital velocity of the Moon about the Earth. The ΔV required to
decelerate into a lunar capture orbit is calculated using another form of the orbital energy
equation:
V2 V 2
2moon
vc 2
rc 2
(A-8.2.1-9)
The total ΔV for this Hohmann transfer with lunar capture is the sum of the two ΔV’s
previously calculated:
Vtot V1 V2
(A-8.2.1-10)
These ΔV values are payload-independent and therefore can be compared to prelimary
estimates for electric propulsion maneuver schemes. All of the values for the above
calculations are listed in Table A-8.2.1-1.
In the event of a requirement of landing near the lunar pole, the ΔV is calculated for a
simple plane change after lunar capture. We assume a launch from Kennedy Space
Center, and therefore an orbit inclination of 28.5o. Accounting for the difference between
the Earth’s obliquity and the Moon’s obliquity, the required plane change amounts to
=83.33o and we calculate the ΔV necessary:
Author: Andrew Damon
Alternative Designs – Lunar Transfer
V pc 2Vc 2 sin
Section A-8.2.1, Page 6
2
(A-8.2.1-11)
This simple plane change maneuver is very costly in terms of ΔV and can be drastically
reduced if necessary with the use of a multi-burn scheme like a bi-elliptic, as in the
bielliptic section.
Author: Andrew Damon
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 7
Table A-8.2.1-1 Gravitational and Orbital Parameters for the
Earth-Moon Hohmann Transfer
Variable
Value
Units
earth
moon
398600.4418
4902.785
6578.14
1847.40
7.784
1.629
10.915
0.187
1.018
195490
0.9664
-0.8315
3.131
0.820
3.952
2.166
km3/s2
km3/s2
km
km
km/s
km/s
km/s
km/s
km/s
km/s
km/s
km/s
km/s
km/s
km/s
km/s
rc1
rc2
Vc1
Vc2
Vp,T
Va,T
Vmoon
aT
eT
V
ΔV1
ΔV2
ΔVtot
ΔVpc
Author: Andrew Damon
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 8
Bielliptic Transfer
While performing preliminary analysis on various methods for lunar transfer, we consider
a bielliptic transfer. For this analysis, we assume a two-body problem with point mass
central bodies, and we consider a coplanar transfer between a circular low-Earth orbit
(LEO) of 200 km altitude and a low lunar orbit (LLO) of 110 km altitude. We analyze
this problem employing the method of patched conics, which accounts for only Earth’s
gravity in Earth vicinity and only the Moon’s gravity in its vicinity.
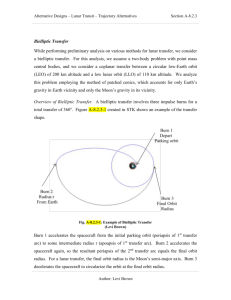
Overview of Bielliptic Transfer. A bielliptic transfer involves three impulse burns for a
total transfer of 360o. Figure A-8.2.1-2 created in STK shows an example of the transfer
shape.
Fig. A-8.2.1-2: Example of Bielliptic Transfer
(Levi Brown)
Burn 1 accelerates the spacecraft from the initial parking orbit (periapsis of 1st transfer
arc) to some intermediate radius r (apoapsis of 1st transfer arc). Burn 2 accelerates the
spacecraft again, so the resultant periapsis of the 2nd transfer arc equals the final orbit
radius. For a lunar transfer, the final orbit radius is the Moon’s semi-major axis. Burn 3
decelerates the spacecraft to circularize the orbit at the final orbit radius.
Author: Levi Brown
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 9
We perform an analysis of a bielliptic transfer and compare the results to a Hohmann
transfer. Per standard orbit mechanics, a three-burn bielliptic transfer actually costs less
than a two burn Hohmann transfer under certain conditions.
The bielliptic transfer
reduces cost when the ratio between the final orbit and initial orbit radii exceeds 15.58.
(Howell, 2008) Because the spacecraft has a velocity near zero at radii far from Earth,
the change in velocity at the intermediate radius r requires a small amount of propellant.
We perform this analysis by running the Matlab code Bi_Elliptic.m. We define the
following constants.
μEarth = 398600.4418 km3/s2
μMoon = 4902.7854 km3/s2
rEarth = 6378.14 km
rMoon = 1737.1 km
aMoon = 384400 km
Finding ΔV1. We find the velocity of the spacecraft in a circular parking orbit.
𝜇
𝑉𝑝𝑎𝑟𝑘 = √ 𝑟𝐸𝑎𝑟𝑡ℎ
𝑝𝑎𝑟𝑘
(A-8.2.1-12)
We then find the conditions necessary to transfer to an intermediate radius. For the first
transfer arc, we define the periapsis and apoapsis radii as follows.
𝑟𝑝 = 𝑟𝑝𝑎𝑟𝑘
(A-8.2.1-13)
𝑟𝑎 = 𝑟
(A-8.2.1-14)
We calculate semi major axis (a), which is required to find the eccentricity for this orbit.
𝑎𝑡1 = 1⁄2 (𝑟𝑝 + 𝑟𝑎 )
𝑒𝑡1 = 1 −
𝑟𝑝
𝑎
(A-8.2.1-15)
(A-8.2.1-16)
We find the time of flight by calculating half the orbit period for an elliptical orbit.
Author: Levi Brown
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 10
𝑎3
𝑡𝑓𝑙𝑖𝑔ℎ𝑡 = 1⁄2 ∗ 2𝜋√
𝜇𝐸𝑎𝑟𝑡ℎ
(A-8.2.1-17)
Applying the energy equation, we determine the departure velocity required to reach the
desired apoapsis.
𝑉𝑑𝑒𝑝𝑎𝑟𝑡1 = √2 (
𝜇𝐸𝑎𝑟𝑡ℎ 𝜇𝐸𝑎𝑟𝑡ℎ
−
)
𝑟𝑝𝑎𝑟𝑘
2𝑎𝑡1
(A-8.2.1-18)
Because we perform tangential burns for bielliptic transfers, we create vector diagrams as
shown in Fig. A-8.2.1-3 to describe the required ΔV.
∆V1
Vdepart1
Vpark
Fig. A-8.2.3-3: Vector Diagram for
1st Tangential Burn
(Levi Brown)
Based on the vector diagram in Fig. A-8.2.1-3, we calculate ∆V1 from the following
equation.
∆𝑉1 = 𝑉𝑑𝑒𝑝𝑎𝑟𝑡1 − 𝑉𝑝𝑎𝑟𝑘
(A-8.2.1-19)
Finding ΔV2. We next find the velocity at apoapsis on the first transfer arc. We
substitute the intermediate radius r for rpark in Eq. (A-8.2.1-20).
𝑉𝑎𝑟𝑟𝑖𝑣𝑒1 = √2 (
𝜇𝐸𝑎𝑟𝑡ℎ 𝜇𝐸𝑎𝑟𝑡ℎ
−
)
𝑟
2𝑎𝑡1
(A-8.2.1-20)
We then calculate the conditions required for the second transfer arc. We define the
periapsis and apoapsis radii of the transfer arc by the following equations.
𝑟𝑝 = 𝑎𝑀𝑜𝑜𝑛
Author: Levi Brown
(A-8.2.1-21)
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 11
𝑟𝑎 = 𝑟
(A-8.2.1-22)
We find the semi-major axis and eccentricity of the second transfer arc, which is
necessary to calculate the velocity required to reach the final orbit radius.
𝑎𝑡2 = 1⁄2 (𝑟𝑝 + 𝑟𝑎 )
𝑒𝑡2 = 1 −
(A-8.2.1-23)
𝑟𝑝
𝑎
(A-8.2.1-24)
𝜇𝐸𝑎𝑟𝑡ℎ 𝜇𝐸𝑎𝑟𝑡ℎ
𝑉𝑑𝑒𝑝𝑎𝑟𝑡2 = √2 (
−
)
𝑟𝑎
2𝑎𝑡2
(A-8.2.1-25)
We calculate ∆V2 by referencing the vector diagram in Fig. A-8.2.1-4 and the following
equation.
Varrive1
Vdepart2
∆V2
Fig. A-8.2.1-4: Vector Diagram for
2nd Tangential Burn
(Levi Brown)
∆𝑉2 = 𝑉𝑑𝑒𝑝𝑎𝑟𝑡2 − 𝑉𝑎𝑟𝑟𝑖𝑣𝑒1
(A-8.2.1-26)
Finding ΔV3. We find the velocity at periapsis of the second transfer arc.
𝑉𝑎𝑟𝑟𝑖𝑣𝑒2 = √2 (
𝜇𝐸𝑎𝑟𝑡ℎ 𝜇𝐸𝑎𝑟𝑡ℎ
−
)
𝑟𝑝
2𝑎𝑡2
(A-8.2.1-27)
We assume the spacecraft reaches the Moon’s vicinity as we reach the final orbit. We
incorporate the Moon’s gravity at this point as required per the method of patched conics.
We calculate the velocity of the Moon in its own orbit.
Author: Levi Brown
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 12
𝜇𝐸𝑎𝑟𝑡ℎ
𝑉𝑀𝑜𝑜𝑛 = √
𝑎𝑀𝑜𝑜𝑛
(A-8.2.1-28)
We compare the energy between the spacecraft and Moon’s orbit to determine the
direction of approach. The spacecraft possesses enough energy to travel far beyond
aMoon, thus it travels faster than the Moon. As we see in Fig. A-8.2.1-5 below, the
spacecraft approaches from behind. Consequently, we define 𝑉̅∞ as shown in Fig. A8.2.1-6.
Vm
E
M
Varrive2
Fig. A-8.2.1-5: Velocity Vectors at Final Orbit Arrival
(Levi Brown)
Vm
Varrive2
V∞
Fig. A-8.2.1-6: Geocentric Vector Diagram
for Lunar Capture
(Levi Brown)
We then find 𝑉̅∞ .
𝑉∞ = 𝑉𝑎𝑟𝑟𝑖𝑣𝑒2 − 𝑉𝑚
Author: Levi Brown
(A-8.2.1-29)
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 13
As seen in Fig. A-8.2.1-7, the spacecraft approaches perilune of a hyperbolic orbit with
velocity 𝑉̅∞ . When the spacecraft reaches perilune, we perform ΔV3 to capture into a
circular low lunar orbit.
Perilune
M
Hyperbolic
Orbit Path
Final
Capture
Orbit
𝑉̅∞
.
Fig. A-8.2.1-7: Lunar Capture from Hyperbolic Orbit
(Levi Brown)
We calculate the orbit energy and define rp as the final orbit radius about the Moon (110
km altitude in this case). We then find the velocity at perilune on the hyperbolic orbit
and the capture velocity required.
𝑉∞ 2
𝜀=
2
𝑉𝑝𝑒𝑟𝑖𝑙𝑢𝑛𝑒 = √2 (𝜀 −
(A-8.2.1-30)
𝜇𝑀𝑜𝑜𝑛
)
𝑟𝑝
𝜇𝑀𝑜𝑜𝑛
𝑉𝑐𝑎𝑝𝑡 = √
𝑟𝑝
(A-8.2.1-31)
(A-8.2.1-32)
We calculate ΔV3 referencing Fig. A-8.2.1-8.
∆𝑉3 = 𝑉𝑝 − 𝑉𝑐
Author: Levi Brown
(A-8.2.1-33)
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 14
Vp
ΔV3
Vc
Fig. A-8.2.1-8: Vector Diagram
for Lunar Capture
(Levi Brown)
Lastly we determine the overall total ΔVand total time of flight.
∆𝑉𝑡𝑜𝑡 = ∆𝑉1 + ∆𝑉2 + ∆𝑉3
(A-8.2.1-34)
𝑇𝑂𝐹𝑡𝑜𝑡 = 1⁄2 (𝑃𝑒𝑟𝑖𝑜𝑑1 + 𝑃𝑒𝑟𝑖𝑜𝑑2 )
(A-8.2.1-35)
Results. As described above, we test different cases to determine the time of flight and
ΔV for a bielliptic transfer. We compare these results to a Hohmann transfer. We
arbitrarily select intermediate radii of 1 x 106 and 3.75 x 106 km beyond the moon’s orbit
radius of 384400 km as test cases. For these two intermediate radii, we test different
parking and capture orbits, as well. As we see in Table A-8.2.1-2, regardless of the test
conditions, a Hohmann transfer requires less ΔV with a much shorter time of flight.
Further investigation shows that increasing the intermediate radii further will result in a
smaller ΔV cost than a Hohmann transfer; however, the time of flight increases
dramatically.
We conclude that for a transfer employing chemical propulsion, a
Hohmann transfer is the most cost effective method.
Author: Levi Brown
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 15
Table A-8.2.1-2 Bielliptic Vs. Hohmann Transfer Result Comparison
Earth Parking Orbit Lunar Parking Orbit Intermediate radius
Parameter
km
km
km
ΔV (km/s)
200
110
1 x 106
TOF (days)
ΔV (km/s)
200
110
3.75 x 106
TOF (days)
ΔV (km/s)
36 x 104
110
1 x 106
TOF (days)
ΔV (km/s)
36 x 104
110
3.75 x 106
TOF (days)
ΔV (km/s)
200
500
1 x 106
TOF (days)
ΔV (km/s)
200
500
3.75 x 106
TOF (days)
ΔV (km/s)
36 x 104
500
1 x 106
TOF (days)
ΔV (km/s)
36 x 104
500
3.75 x 106
TOF (days)
Author: Levi Brown
Hohmann
Bielliptic
4.0
5
4.0
5
1.8
6
1.8
6
3.9
5
3.9
5
1.7
6
1.7
6
4.2
81
4.03
365
2.11
83
2.03
365
4.1
81
3.9
365
2.05
83
1.9
365
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 16
Weak-Stability Boundary
We can save a significant amount of propellant by performing a weak-stability transfer to
the Moon. This transfer reduces ∆v by 25% when compared to a Hohmann Transfer.
The savings can nearly double the amount of allowable payload placed into low lunar
orbit (Belbruno). The tradeoff to this propellant savings is the increase in transfer time of
typically 80 to 100 days.
A weak-stability boundary transfer is a four-body problem that consists of the OTV, the
Moon, the Sun and the Earth. By taking advantage of the lunar and solar gravity the total
required ∆v is decreased. To begin the transfer the OTV performs a maneuver displacing
it from the initial parking orbit around the Earth. The maneuver must align the transfer
path so that the OTV flies by the Moon. This allows the vehicle to gain enough energy to
reach the Earth’s weak-stability boundary.
The connection of the three unstable
Lagrange points is the weak-stability boundary, which is also referred to as the sphere of
influence. These three points are the locations where the Earth’s gravity exactly cancels
out the Sun’s gravity. The reasoning for the long transfer time is attributed to the large
distance the OTV must travel to reach this boundary. The approximate location of the
sphere of influence is 1.5 x 106 km away from the center of the Earth. A second
maneuver is performed at this point to return the vehicle back to the Moon and allow it to
be ballistically captured by the lunar gravity. The amount of energy required to stabilize
the orbit is negligible. An example of this transfer is shown in Fig. A-8.2.1-9.
Fig. A-8.2.1-9. Weak-Stability Boundary
(Kara Akgulian)
Author: Kara Akgulian
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 17
The variable ∆v1 describes the first maneuver performed to exit the Earth’s parking orbit.
Belbruno explains that going to the weak-stability boundary raises the periapsis with
nearly zero ∆v because of the sensitivity of the region. Another labeled variable, ∆v2
shows the second maneuver, which is a ballistic capture trajectory to return to the Moon.
In the more generally used Hohmann transfer a hyperbolic velocity v∞ determines the ∆v
required to capture the OTV to orbit the Moon. The weak-stability boundary transfer
eliminates this hyperbolic velocity and decreases the overall propellant required. Please
see the Hohmann Transfer Alternative Trajectory Design Section for more information
about how a Hohamnn is performed and the definition of the variable v∞.
To model a weak-stability boundary transfer in STK we have to line up the first
maneuver for a fly by with the Moon. This maneuver requires that each planetary body
be aligned correctly to achieve a successful path. The launch and coast times for the
vehicle must be timed perfectly so that the path does not miss or collide with the Moon.
In addition, the trajectory must reach the weak-stability boundary after this pass. To
achieve both objectives successfully we have to create targeting points in STK. The
Lagrange Points are continuously moving, which makes tracking them a difficult task.
To accurately align and time all four bodies would be a massive project that would span
beyond the scope of this feasibility study. There has been only one successful mission
which was performed by the Japanese spacecraft Hiten in 1987. Although the mission
was not planned the use of the weak-stability boundary allowed the probe to reach the
Moon with only 10% of its fuel capacity. Because of the complexity of the weakstability boundary transfer and its highly theoretical background it does not make this a
viable option to perform.
Author: Kara Akgulian
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 18
Preliminary Spiral Transfer
We investigate the possibility of performing a low thrust spiral trajectory from Earth to
the Moon. Although a spiral transfer takes several months to reach the Moon, the
increase in engine efficiency suggests this type of transfer is more economical. We
approximate the ΔV required for a spiral transfer between two circular orbits as follows,
(Hrbud)
∆𝑉 = 𝑉2 − 𝑉1
(A-8.2.1-36)
where V2 and V1 are the circular orbit velocities.
𝜇
𝑟
𝑉𝑐 = √
(A-8.2.1-37)
μ is the gravitational parameter for Earth and r is the orbit radius. We assume the parking
orbit to be at an altitude of 200 km. Relative to the Earth, the capture orbit is essentially
the Moon’s orbit radius of 384400 km. Thus with Eqs. (A-8.2.1-36) and (A-8.2.1-37),
we find the ΔV to transfer to the Moon as approximately 7.0 km/s.
Electric Propulsion System Sizing. We perform an electric propulsion sizing analysis to
determine the OTV mass with this mission configuration. We define specific power (β)
and engine efficiency (η) as shown in Table A-8.2.1-3. (Humble) We establish the
maximum power possible as 3.0 kW (Pmax). Employing this power, we find the inert
mass for the OTV. With a current payload mass of approximately 290 kg, we calculate
final OTV mass. The propellant mass is calculated as follows where Isp is 1000 seconds
and g is the acceleration due to gravity.
𝑚𝑖𝑛𝑒𝑟𝑡 = 𝛽 ∗ 𝑃𝑚𝑎𝑥
𝑚𝑓𝑖𝑛𝑎𝑙 = 𝑚𝑝𝑎𝑦 + 𝑚𝑖𝑛𝑒𝑟𝑡
(A-8.2.1-38)
(A-8.2.1-39)
−∆𝑉
𝑚𝑝𝑟𝑜𝑝 = 𝑚𝑝𝑎𝑦 (1 − 𝑒 𝐼𝑠𝑝 𝑔 )
Author: Levi Brown
(A-8.2.1-40)
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 19
We then find initial OTV mass.
𝑚𝑖𝑛𝑖𝑡𝑖𝑎𝑙 = 𝑚𝑓𝑖𝑛𝑎𝑙 + 𝑚𝑝𝑟𝑜𝑝
(A-8.2.1-41)
With this analysis, we find that the initial OTV mass is approximately 550 kg.
Table A-8.2.1-3 Engine Sizing
Parameter
Value
β
0.033
η
0.546
Pmax (kW)
3.0
mpay (kg)
290
Isp (s)
1000
OTV Mass (kg)
550
Author: Levi Brown
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 20
Circularizing the Capture Orbit
When using the initial two body spiral transfer design the orbit about the Moon will result
in a highly eccentric ellipse. To perform the landing maneuver the orbit about the Moon
must be circular. Described in this section is an extensive study to determine the most
cost efficient method of circularizing the lunar capture orbit. We examine a combination
of electric propulsion and solid propulsion burns.
While burning, the engines are
assumed to perform at a constant thrust at an optimum level and pointing angle. The
desired circular altitude above the Moon is 110 km. All velocities were calculated by
means of the energy equation, which is described in Eq. 8.2.1-42.
𝑣2
2
𝜇
𝜇
= 𝑟 − 2𝑎
(8.2.1-42)
The first analysis done to circularize the orbit is by using the electric propulsion engines
thrusting across the arc 45 degrees above and below the line of periapsis. The initial
eccentric orbit has a rp = 5x104 km and ra = 1847.4 km. We used the ideal rocket equation
to determine the Δ𝑣 boost to perform the maneuver.
𝑚
Δ𝑣 = −𝐼𝑠𝑝 𝑔𝑙𝑛 (𝑚𝑓 )
(8.2.1-43)
0
To calculate the final mass we used equation:
𝑚𝑓 = 𝑚0 − 𝑚𝑑𝑜𝑡 (𝑇𝑂𝐹)
(8.2.1-44)
where m0 is the initial mass, mf is the final mass, mdot is the mass flow rate and TOF is
the time of flight required to travel the -45 degrees to +45 degrees. We can use Kepler’s
Eqn. 8.2.1-45 to calculate time of flight
𝜇
√𝑎3 (𝑇𝑂𝐹) = 𝐸 − 𝑒𝑠𝑖𝑛(𝐸)
(8.2.1-45)
where 𝜇 is the gravitational parameter of the moon, a is the semi-major axis of the current
orbit, E is the eccentric anomaly and e is the eccentricity of the current orbit. The results
give a ∆v of 0.38 km/s which is used at each pass of perilune to decrease the apilune
distance. This change in velocity is measured as an impulsive burn because the ∆v was
applied symmetric to the line of periapsis and the time of flight is only a small portion of
the orbital period.
Author: Kara Akgulian
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 21
We wrote a MATLAB script (Circularization_1) to perform the calculations and
determine the total time to perform the maneuver. The program runs a loop until the
eccentricity becomes as close to zero as possible. Inside the loop the energy equation
determines the velocities of the initial orbit.
The velocity of the new orbit is the
difference between the velocity from the original orbit and Δ𝑣. After each loop the old
orbit becomes the new orbit and the calculations are repeated. The orbital parameters are
described using:
𝑎=
𝑒=
1
2
𝑟𝑎
𝑎
(𝑟𝑝 + 𝑟𝑎 )
(8.2.1-46)
−1
(8.2.1-47)
Where a is the semi-major axis of the orbit and e is the eccentricity. Kepler’s equation
was used again to determine the time of flight per orbit. The program then adds all the
times to produce the total time to perform the maneuver. The results show that it would
take 4 years to circularize the orbit. This value is only the time to circularize and does
not include the entire spiral transfer. This would significantly exceed our requirement of
a one year transfer. We also performed a study where the OTV performs a maneuver
both at periapsis and apoapsis. Unfortunately, the vehicle crashes into the Moon before
the orbit is circularized.
A solid propulsion boost at perilune would deliver a higher ∆v, which would decrease the
apilune distance faster than when using electric propulsion.
iterations to determine the most efficient
We computed several
Δ𝑣 value to use. The analysis performed on
five different Δ𝑣 boost values each delivered at three different rp distances produces
fifteen total combinations. We can then apply each set of fifteen combinations to an
additional three different combinations; the boost delivered on the first orbit, among the
first two, and among the first three. The remaining orbits that it takes to circularize have
a ∆v value of 0.38 m/s for all cases. Now we have a total of 45 different combinations.
We can then make calculations for the additional launch cost necessary to deliver the
extra boost and the TOF to circularize the orbit.
Author: Kara Akgulian
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 22
We used the ideal rocket equation to determine the amount of propellant that is needed to
perform each boost. The Isp of the engine is 290 s and the mass of the OTV is 600 kg.
This mass was multiplied by the number of orbits it requires to circularize to attain a total
mass propellant. A launch cost is then calculated by multiplying this mass by a given
cost per kg of $4,292/kg. We used the MATLAB script Circularization_2 to produce
Tables 8.2.1-4 to 8.2.1-6, which summarize the results found.
Table 8.2.1-4 Continuous Burn with Electric
Propulsion Applied to the First Orbit
rp
∆v boost(km/s)
1837.4
1837.4
1837.4
1837.4
1837.4
2737.4
2737.4
2737.4
2737.4
2737.4
3737.4
3737.4
3737.4
3737.4
3737.4
0.01
0.03
0.05
0.1
0.2
0.01
0.03
0.05
0.1
0.2
0.01
0.03
0.05
0.1
0.2
Total mprop
(kg)
154.85
153.48
146.64
146.64
146.64
119.92
119.92
119.92
119.92
94.16
99.24
94.16
94.16
94.16
94.16
Launch Cost ($)
TOF (days)
665,000
659,000
629,000
629,000
629,000
515,000
515,000
515,000
515,000
404,000
426,000
404,000
404,000
404,000
404,000
56.51
23.09
12.27
7.4
5.36
67.31
27.42
14.51
8.54
5.83
77.23
31
16.31
9.47
6.57
Author: Kara Akgulian
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 23
Table 8.2.1-5 Continuous Burn with Electric
Propulsion Divided Among the First Two
Orbits
rp
∆v boost(km/s)
1837.4
1837.4
1837.4
1837.4
1837.4
2737.4
2737.4
2737.4
2737.4
2737.4
3737.4
3737.4
3737.4
3737.4
3737.4
0.01
0.03
0.05
0.1
0.2
0.01
0.03
0.05
0.1
0.2
0.01
0.03
0.05
0.1
0.2
Total mprop
(kg)
156.23
153.48
153.48
146.64
146.64
121.24
119.92
119.92
119.92
119.92
99.24
97.33
94.16
94.16
94.16
Launch Cost ($)
TOF (days)
671,000
659,000
659,000
629,000
629,000
520,000
515,000
515,000
515,000
151,000
426,000
418,000
404,000
404,000
404,000
112.8
45.26
23.09
12.27
7.4
134.56
53.96
27.42
14.51
8.54
154.1
61.6
31
16.31
9.47
Launch Cost ($)
TOF (days)
669,000
669,000
669,000
669,000
629,000
522,000
515,000
515,000
515,000
477,000
426,000
422,000
422,000
404,000
404,000
169.01
67.79
34.21
17.7
9.76
201.88
80.69
40.65
20.9
11.28
231.04
92.4
46.5
23.58
12.8
Table 8.2.1-6 Continuous Burn with Electric
Propulsion Divided Among the First Three
Orbits
rp
∆v boost(km/s)
1837.4
1837.4
1837.4
1837.4
1837.4
2737.4
2737.4
2737.4
2737.4
2737.4
3737.4
3737.4
3737.4
3737.4
3737.4
0.01
0.03
0.05
0.1
0.2
0.01
0.03
0.05
0.1
0.2
0.01
0.03
0.05
0.1
0.2
Total mprop
(kg)
155.77
155.77
155.77
155.77
146.64
121.68
119.92
119.92
119.92
111.23
99.24
98.39
98.39
94.16
94.16
155.77
Author: Kara Akgulian
17
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 24
Even though, our TOF is decreased to a matter of days the required launch cost to
perform these boosts is extremely high. For this reasons and the added complexity that
would be required to add an additional solid rocket booster to the already electric
propulsion system makes this an impractical solution.
Using an impulsive burn is not an option after running the previous two simulations with
an electric propulsion system or with a solid propulsion system. Next we use the electric
propulsion systems to deliver a continuous burn. For this next scenario we use the same
∆v that was calculated during the first scenario of 0.38 m/s followed by an additional ∆v
of +/- 25 percent. The additional launch cost and the TOF results are displayed in Table
8.2.1-7. The Isp for the electric propulsion engine is 1800 s and the mass flow rate is 5.6
x 10-6 kg/s. After computing the calculations for the solid booster using the same ∆v we
can determine the difference in launch cost and TOF between the electric propulsion and
the solid propulsion. The results for the solid propulsion system are given in Table 8.2.18. The Isp for the solid rocket engine is 280 s and the mass flow rate is 1.8 kg/s.
Table 8.2.1-7 Continuous Burn with Electric
Propulsion
∆v/orbit (m/s)
Total ∆v (m/s) mprop (kg)
0.38
0.25(0.38)+0.38
0.25(.038)-.038
0.63
0.79
0.48
21.99
27.61
16.42
Launch Cost
($)
94,000
118,000
70,000
TOF (days)
Launch Cost
($)
670,000
864,000
488,000
TOF (days)
45.45
57.07
33.93
Table 8.2.1-8 Continuous Burn with Solid
Propulsion
∆v/orbit (m/s)
Total ∆v
(m/s)
mprop (kg)
0.38
0.25(0.38)+0.38
0.25(.038)-.038
0.63
0.79
0.48
156.22
201.26
113.72
Author: Kara Akgulian
1.45
1.86
1.05
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 25
There is a significant drop in the launch cost for the electric propulsion system compared
to the solid propulsion system. The TOF for the EP has been decreased to a matter of
days. The final method to circularize the orbit is to use a continuous burn from the EP
system.
Author: Kara Akgulian
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 26
Two-Body Low Thrust Spiral Transfer
After selecting electric propulsion as the translunar propulsion system, we develop a
model for a low thrust spiral transfer to the moon. For this analysis, we assume a twobody problem with point mass central bodies, and we consider a coplanar transfer from a
circular low-Earth orbit (LEO) of 200 km altitude. We analyze this problem employing
the concept of the method of patched conics, which only accounts for the spacecraft and
an attracting body. When the Earth’s gravity is the primary force on the vehicle, we only
include Earth. When the Moon becomes the primary source of gravity, we only include
the Moon.
Force Definitions. We define the spacecraft as a point mass in the circular parking orbit
described above. We describe this configuration in Fig. A-8.2.1-10 below.
𝑇̅
γ
̂
𝜽
𝒓̂
𝐹̅𝑔
Fig. A-8.2.1-10: Point Mass in Orbit
(Levi Brown)
We define 𝑟̂ as the direction from the center of the Earth to the spacecraft.
𝜃̂ is
perpendicular to 𝑟̂ and tangential to the motion of the spacecraft. We assume only two
Author: Levi Brown
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 27
forces act on the spacecraft: thrust 𝑇̅ and gravity force 𝐹̅𝑔 . We assume the engine thrusts
in the velocity direction at an angle γ from the tangential direction. We define the forces
as follows.
𝐹̅𝑔 = −𝐹𝑔 𝑟̂
(A-8.2.1-48)
𝑇̅ = 𝑇 sin 𝛾 𝑟̂ + 𝑇 cos 𝛾 𝜃̂
(A-8.2.1-49)
Derive Equations of Motion. We write the position of the spacecraft
𝑅̅ 𝑂𝑃 = 𝑟𝑟̂
(A-8.2.1-50)
where r is the distance to the spacecraft from the central body. We take the inertial
derivative to find velocity assuming the spacecraft orbits at the rate 𝜃̇. We take the
derivative a second time to find spacecraft acceleration.
𝑅̅̇ = 𝑟̇ 𝑟̂ + 𝑟𝜃̇𝜃̂
(A-8.2.1-51)
𝑅̅̈ = (𝑟̈ − 𝑟𝜃̇ 2 )𝑟̂ + (𝑟𝜃̈ + 2𝑟̇ 𝜃̇)𝜃̂
(A-8.2.1-52)
We redefine the force of gravity where μ is the gravitational parameter and m is the mass
of the spacecraft. From Newton’s Second Law, we result in the following equations for
the 𝑟̂ and 𝜃̂ directions respectively.
𝐹̅𝑔 = −
−
𝜇𝑚
𝑟̂
𝑟2
𝜇𝑚
+ Tsin 𝛾 = 𝑚(𝑟̈ − 𝑟𝜃̇ 2 )
𝑟2
𝑇 cos 𝛾 = 𝑚(𝑟𝜃̈ + 2𝑟̇ 𝜃̇)
(A-8.2.1-53)
(A-8.2.1-54)
(A-8.2.1-55)
By rearranging Eqs. (A-8.2.1-54) and (A-8.2.1-55), we define the equations of motion.
Author: Levi Brown
Alternative Designs – Lunar Transfer
𝜇
𝑇
+
sin 𝛾 + 𝑟𝜃̇ 2
2
𝑟
𝑚
(A-8.2.1-56)
1 𝑇
( cos 𝛾 − 2𝑟̇ 𝜃̇)
𝑟 𝑚
(A-8.2.1-57)
𝑟̈ = −
𝜃̈ =
Section A-8.2.1, Page 28
Initial Conditions. In order to integrate the equations of motion, we must establish the
initial conditions for all variables in the equations. Because the spacecraft is initially
orbiting in a circular parking orbit, we define ro as the orbit radius and assume the initial
angle is zero. The velocity is in the 𝜃̂ direction, which we define as Eq. (A-8.2.1-58).
Velocity for the particle can also be written as Eq. (A-8.2.1-59); therefore, we calculate
initial 𝜃̇ by rearranging to Eq. (A-8.2.1-60).
𝜇
𝑉=√
𝑟𝑜
(A-8.2.1-58)
𝑉 = 𝑟̇ 𝑟̂ + 𝑟𝜃̇𝜃̂
(A-8.2.1-59)
𝜃̇𝑜 =
𝑉𝑜
𝑟𝑜
(A-8.2.1-60)
We define the following initial conditions.
𝑟𝑜 = 6578.1 𝑘𝑚
(A-8.2.1-61)
𝜃𝑜 = 0
(A-8.2.1-62)
𝑟̇𝑜 = 0
(A-8.2.1-63)
𝜃̇ = 1.2 𝑥 10−3 𝑟𝑎𝑑/𝑠
(A-8.2.1-64)
Author: Levi Brown
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 29
Spiral Out. In order to predict the spiral trajectory of the spacecraft, we numerically
integrate the equations of motion with the Matlab codes Spiral_EOM_Script.m,
Spiral_Out.m, and Spiral_In.m. Running Spiral_Out.m, which only includes Earth’s
gravity, we integrate Eqs. (A-8.2.1-56) and (A-8.2.1-57) for a specified flight time. This
integration results in a time history for the four variables r, θ, 𝑟̇ , and 𝜃̇. With the radius
and angle, we can create a plot of the resultant spiral trajectory similar to as shown in Fig.
A-8.2.1-11.
5
x 10
Lunar Orbit
Spiral Trajectory
3
Y Distance (km)
2
1
Position at
end
of integration
0
-1
-2
-3
-4
-3
-2
-1
0
1
X Distance (km)
2
3
4
5
x 10
Fig. A-8.2.1-11: Spiral Trajectory from Earth
(Levi Brown)
The final position of the spacecraft depends on the initial spacecraft mass, thrust level,
and the time of flight specified. We vary these parameters as required until the spacecraft
reaches the Moon’s sphere of influence, which is defined as a distance of approximately
66300 km from the Moon’s center. (Bate)
Author: Levi Brown
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 30
Switching Gravity Models. After reaching the Moon’s sphere of influence, we switch
gravity models to include only the Moon. At this point, we thrust in the anti-velocity
direction to slow the spacecraft down and capture in lunar orbit. We must determine this
velocity relative to the Moon in order to model the spiral in trajectory. Because we
assume the Moon’s orbit is circular, the Moon’s velocity can be calculated as follows:
𝑉̅𝑀 = 𝑉𝑀 𝜃̂
(A-8.2.1-65)
𝜇𝐸
𝑟𝑀
(A-8.2.3-66)
where Vm is defined as
𝑉𝑀 = √
and rm is the semi-major axis of the Moon of 384400 km.
Taking the results of Spiral_Out.m and inserting them into Eq. (A-8.2.1-59) yields the
velocity of the spacecraft relative to the Earth (𝑉̅𝑠𝑎𝑡 ). By rearranging Eq. (A-8.2.1-67),
we find the velocity of the spacecraft relative to the Moon 𝑉̅𝑟𝑒𝑙 .
𝑉̅𝑀 + 𝑉̅𝑟𝑒𝑙 = 𝑉̅𝑠𝑎𝑡
(A-8.2.1-67)
𝑉̅𝑟𝑒𝑙 = 𝑉̅𝑠𝑎𝑡 − 𝑉̅𝑀
(A-8.2.1-68)
Eq. (A-8.2.1-68) results in the velocity relative to the Moon in 𝑟̂ -𝜃̂ coordinates; however,
these coordinates remain fixed in the Earth frame. In order to model the spiral in, we
must display the integration variables in a Moon-fixed frame; therefore, we establish a
new coordinate system: 𝑟̂𝑀 -𝜃̂𝑀 . This means the velocities in Eq. (A-8.2.1-68) must be
written in a coordinate system constant in both frames as shown in Fig. A-8.2.1-12.
Author: Levi Brown
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 31
𝑝̂
𝜃̂
𝑟̂
θ
θ
𝑒̂
Fig. A-8.2.1-12: Coordinate Frame Relationship
̂
̂ -𝒉
̂-𝒛̂ and 𝒓̂-𝜽
Between 𝒆̂-𝒑
(Levi Brown)
Applying the following transformation matrix, we write 𝑉̅𝑠𝑎𝑡 and 𝑉̅𝑀 in 𝑒̂ -𝑝̂ coordinates
and calculate 𝑉̅𝑟𝑒𝑙 .
𝑟̂
𝜃̂
ℎ̂
𝑒̂
cosθ
-sinθ
0
𝑝̂
sinθ
cosθ
0
𝑧̂
0
0
1
Fig. A-8.2.1-13: Transformation Matrix
̂
̂ -𝒉
̂-𝒛̂ and 𝒓̂-𝜽
Between 𝒆̂-𝒑
(Levi Brown)
Spiraling out, the spacecraft orbits in a counterclockwise direction resulting in the
angular momentum vector pointing out of the page. Spiraling in, the angular momentum
vector points into the page.
We then relate 𝑟̂𝑀 -𝜃̂𝑀 -ℎ̂𝑀 to 𝑒̂ -𝑝̂ -𝑧̂ as follows.
Author: Levi Brown
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 32
𝑝̂
𝑒̂
θ2
𝜃̂𝑀
𝑟̂𝑀
Fig. A-8.2.1-14: Coordinate Frame Relationship
̂𝑴
̂ 𝑴 -𝒉
̂-𝒛̂ and 𝒓̂𝑴 -𝜽
Between 𝒆̂-𝒑
(Levi Brown)
𝑟̂𝑀
𝜃̂𝑀
ℎ̂𝑀
𝑒̂
cosθ2
-sinθ2
0
𝑝̂
-sinθ2 -cosθ2
0
𝑧̂
0
-1
0
Fig. A-8.2.1-15: Transformation Matrix
̂𝑴
̂ 𝑴 -𝒉
̂-𝒛̂ and 𝒓̂𝑴 -𝜽
Between 𝒆̂-𝒑
(Levi Brown)
After reaching the Moon’s sphere of influence, we assume that the Moon is at the same
angle θ in its orbit as the spacecraft. For this reason, θ2 is offset from θ by 180 deg. as
shown in Fig A-8.2.1-16.
𝜃2 = 𝜋 − 𝜃
Author: Levi Brown
(A-8.2.1-69)
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 33
𝑝̂
M
𝑒̂
𝑝̂
θ2
θ
E
𝑒̂
Fig. A-8.2.1-16: Angles When Switching Models
(Levi Brown)
We write 𝑉̅𝑟𝑒𝑙 in 𝑟̂𝑀 -𝜃̂𝑀 coordinates using the transformation matrix Fig. A-8.2.1-6.
Spiral In. We establish initial conditions in the 𝑟̂𝑀 -𝜃̂𝑀 frame to model the spiral in
trajectory. We find the radius from the moon as the difference between the Moon’s
radius and the current radius relative to Earth (r). 𝑟̇2𝑜 is the 𝑟̂𝑀 component of 𝑉̅𝑟𝑒𝑙 . Initial
θ2o is the same value found per Eq. (A-8.2.1-69). We calculate 𝜃̇2𝑜 with Eq. (A-8.2.1-60)
where V is the 𝜃̂𝑀 component of 𝑉̅𝑟𝑒𝑙 and r is the same as found as follows.
𝑟2𝑜 = 𝑟𝑀 − 𝑟
(A-8.2.1-70)
Because we thrust in the anti-velocity direction, the equations of motion modify to as
follows.
𝜇
𝑇
+
sin 𝛾 + 𝑟𝜃̇ 2
𝑟2 𝑚
(A-8.2.1-71)
1
𝑇
𝜃̈ = (− cos 𝛾 − 2𝑟̇ 𝜃̇)
𝑟
𝑚
(A-8.2.1-72)
𝑟̈ = −
Author: Levi Brown
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 34
Eqs. (A-8.2.1-71) and (A-8.2.1-72) are integrated by running Spiral_In.m. Taking the
results from this integration, we develop plots similar to Fig. A-8.2.1-17 for the spiral in
toward the Moon.
4
x 10
Moon
Spiral In
5
4.5
4
Y Distance (km)
3.5
3
2.5
2
1.5
1
0.5
0
-1
0
1
2
X Distance (km)
3
4
Fig. A-8.2.1-17: Spiral In Trajectory to Moon
(Levi Brown)
Putting the entire trajectory together results in Fig. A-8.2.1-18.
Author: Levi Brown
5
4
x 10
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 35
Lunar Orbit
Spiral Out
Moon Position
Spiral In
5
x 10
3
Y Distance (km)
2
1
0
-1
-2
-3
-4
-3
-2
-1
0
1
X Distance (km)
2
3
4
5
x 10
Fig. A-8.2.3-18: Spiral Trajectory from Earth to Moon
(Levi Brown)
Results. This analysis applies the physics of a particle in orbit to determine the spacecraft
trajectory independently of engine properties. By running this analysis, we determine
whether a spacecraft of a given mass can accomplish the mission for a given thrust in a
given amount of time; however, it does not indicate whether the engine realistically has
those performance levels. We perform this analysis iteratively with the propulsion sizing
analysis described in section 5.3.3.
Once we determine a mass, thrust, and time combination that reaches lunar orbit with the
trajectory analysis, we then determine the required spacecraft mass for that time and
thrust with the propulsion analysis. When the mass from the propulsion analysis matches
the mass from the trajectory analysis, we know we have a realistic system capable of
achieving the mission requirements.
Author: Levi Brown
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 36
Shadow Analysis
Eclipses by the Earth and Moon will block the OTV from the Sun as the vehicle performs
its transfer to the moon. It is important to know how long these periods in shadow will
occur so we can prepare the OTV for the extreme temperature changes and the lack of
solar energy.
We perform the calculations assuming that all orbits are circular and co-planar. By
taking all bodies involved as moving in the same plane we observe a maximum
obstruction from the Sun. This assumption gives the maximum time of flight spent in the
shadow. Although this scenario does not represent the true orientation of the bodies, it
gives a good upper limit to prepare for. The transfer out to the Moon creates two spirals;
one spiraling out of the Earth parking orbit and the other spiraling into the Moon’s
capture orbit. We assume that the spirals are a series of circular orbits that increase or
decrease in size depending on the stage of the transfer. Because the spirals are only
slightly elliptical it is a good approximation to assume circular orbits. Figure 8.2.1-19
describes the problem with an Earth centered view as the OTV spirals out of the Earth
parking orbit. The dashed circular lines represent spiral transfer, which is assumed
circular for this problem. The gray triangle is the shadowed area created by the Earth
blocking the Sun.
Fig. 8.2.1-19. Shadow created by Earth and the circular transfer out.
(Kara Akgulian)
Author: Kara Akgulian
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 37
The orbital distances used in the calculations are described in the Table 8.2.1-9. The
variable r, noted in Fig. 8.2.1-9 is the radius of the circular orbit that the OTV is on. This
radius will increase in size as the vehicle continues its transfer to the Moon.
Table 8.2.1-9 Orbital Distances
Variable
REarth
RMoon
RSun
lEarth
lMoon
Value
6378.47000
1737.40000
695500.000
149597890
146692378
Units
km
km
km
Km
km
We can calculate the arc length of each circle by using a simple set of trigonometric
rules. First calculate the distance x from the center of the Earth to the tip of the shadow
by using triangle ratios. Figure 8.2.1-20 shows the triangle relationship and Eq. 8.2.1-73
is its mathematical representation.
Fig. 8.2.1-20. Triangle Relationship
(Kara Akgulian)
𝑅𝑆𝑢𝑛
(𝑙𝐸𝑎𝑟𝑡ℎ +𝑥)
=
𝑅𝐸𝑎𝑟𝑡ℎ
(8.2.1-73)
𝑥
This distance along with a trigonometric function; tan (theta) = REarth/x, is then used to
calculate the angle theta. Lastly, an oblique triangle outlined in red and shown in Fig.
8.2.1-19 allows for the calculation of theta2. We can calculate this angle using Eq. 8.2.174 with the distance x and the radius including the angle theta. The arc length is then
simply the radius of the orbit multiplied by theta2.
𝑥𝑠𝑖𝑛(𝑡ℎ𝑒𝑡𝑎)
𝑡ℎ𝑒𝑡𝑎2 = 𝑠𝑖𝑛−1 (
𝑟
)
Author: Kara Akgulian
(8.2.1-74)
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 38
From this arc length we calculate a percentage that compares the amount of the circular
orbit spent in the shadow to the entire orbit. We can calculate the time of flight that the
orbit spends in the shadow by using Kepler’s Equation:
𝑀 = 𝐸 − 𝑒𝑠𝑖𝑛(𝐸)
(8.2.1-75)
where E is the eccentric anomaly, e is the eccentricity of the orbit and M is the mean
motion described in Eq. 8.2.1-76. Because all orbits are circular the we can measure the
eccentric anomaly as the angle from the line of periapsis to the location where the
shadow ends (theta). The eccentricity of the orbit is zero because it is circular.
𝜇
𝑀=√
𝑎3
(𝑡 − 𝑡𝑝 )
(8.2.1-76)
where 𝜇 is the gravitational parameter of the Earth, a is the semi-major axis of the orbit, t
is the time, and tp is the time to periapsis. The semi-major axis is equal to r, the radius of
the orbit, because it is a circle. Time of periapsis is zero because we are starting our path
there. Because this is only half of the shadow, the total time of flight is twice that of the
calculated time from Eqn. 8.2.1-75.
A Matlab script (Earth_Shadow.m) is used to calculate the arc lengths, percentages and
time of flights for a series of circular orbits about the Moon and the Earth. The data is
calculated inside a while loop so that in each loop the radius of the transfer circle is
incremented. The orbits were limited to the point of the Moon’s spherical influence.
This is where the Earth’s spirals out will begin to spiral in toward the Moon. This value
is assumed to be a distance of 3.0x105 km from the center of the Earth and 6.6x104 km
from the center of the Moon. A quadrant check must be performed while calculating the
value of theta2. From Fig. 8.2.1-19, we see that the angle will always be acute. A simple
if statement is placed to assure that the angle will always be less than 90°.
From Fig. 8.2.1-21, results from the Earth centered view; we see that the closer to the
attracting body the longer the vehicle will be covered in shadow. Figure 8.2.1-22 shows
the data given a Moon centered view. The results for an Earth centered view gives the
maximum time of flight spent in the Earth’s shadow as 2.4 hours and for the Moon
Author: Kara Akgulian
Alternative Designs – Lunar Transfer
Section A-8.2.1, Page 39
centered view as 3.0 hours. The maximum percentage of an orbit in the shadow for the
Earth centered is 44 percent and for the Moon centered is 46 percent.
Fig. 8.2.1-21. Results from Earth Centered View
(Kara Akgulian)
Fig. 8.2.1-22: Results from Moon Centered View
(Kara Akgulian)
Author: Kara Akgulian
Alternative Designs – Lunar Transfer
Section A-8.2.2, Page 40
A-8.2.2 – Propulsion Alternatives
Chemical Propellants Selection
Historically, chemical propulsion has been the method of choice for getting to the moon.
The Surveyor missions accomplished lunar transfer with the Centaur, Apollo used a J-2
engine, and Luna used the Soyuz.
A feasibility analysis was done to figure out which chemical propellants were best suited
for our mission, given the constraint that the OTV needs to fit inside the payload fairing
of an existing launch vehicle. Adapted from a method used in Space Propulsion Analysis
and Design (chapter 10), a range of required propellant densities and specific impulses
were produced. The curves were constrained by the volume available inside the payload
fairing and the mass of propellant needed to accomplish the delta V. The principle
equations needed for this analysis are derived out of the ideal rocket equation, shown in
Eqs. A-8.2.2-1 and A-8.2.2-2.
(
𝛥𝑉
)
𝐼 𝑔
𝑚𝑝𝑎𝑦 (𝑒 𝑠𝑝 0 −1)(1−𝑓𝑖𝑛𝑒𝑟𝑡 )
𝑚𝑝𝑟𝑜𝑝 =
1−𝑓𝑖𝑛𝑒𝑟𝑡
𝑚𝑝𝑟𝑜𝑝 = 𝑚𝑖 (1 − 𝑒
𝛥𝑉
(
)
𝐼 𝑔
𝑒 𝑠𝑝 0
𝛥𝑉
)
𝐼𝑠𝑝 𝑔0
(
)
(A-8.2.2-1)
(A-8.2.2-2)
Figure A-8.2.2-1 shows the result, in which the yellow region represents propellant
characteristics that would be completely infeasible for the mission. The X’s on the graph
represent data points for actual propellant combinations, assuming historical values for
the inert mass fraction.
Author: Brad Appel
Alternative Designs – Lunar Transfer
Section A-8.2.2, Page 41
Feasible Propellant Densities
2000
finert = 0.05
finert = 0.10
1800
finert = 0.15
finert = 0.20
1600
finert = 0.25
finert = 0.30
finert = 0.13
Average Propellant Density [kg/m3]
1400
1200
infeasible
region
1000
800
LV Payload
Volume Constraint
LOx / LH2
600
400
infeasible region
200
0
250
300
350
400
Isp [s]
450
500
550
600
Fig. A-8.2.2-1: Chemical Propellant Feasibility for Lunar Transfer.
(Brad Appel)
This propellant feasibility analysis leads us to one definitive conclusion: The only
chemical propellants capable of accomplishing our mission are Liquid Oxygen and
Liquid Hydrogen. Looking at Figure A-8.2.2-1, it is apparent that none of the other
combinations (which include LOx/Methane, LOx/RP-1, MMH/N2O4, and Solid TP-H1202) even come close to the feasibility region.
Author: Brad Appel
Alternative Designs – Lunar Transfer
Section A-8.2.2, Page 42
EP Gimbal
At the end of our decision making process, we settle on conducting attitude control
maneuvers with reaction wheels and desaturating those reaction wheels with attitude
control thrusters. The comparison between masses of propellant required for desaturation
using attitude control thrusters and using a main engine gimbal is very straight forward
after some preliminary analysis and some approximations. Figure A-8.2.2-2 shows a
representation of the OTV with a 3-axis gimbal mount for the main engine (this figure
also appears in section 8.2.2)
Fig. A-8.2.2-2: This is a representation of the OTV equipped with a 3-axis gimbal mount on
the main thruster. It also includes the location of the center of mass and critical OTV
dimensions at the time the alternative was considered.
(Kristopher Ezra)
To determine the propellant mass required to desaturate the reaction wheels, we consider
the following equation developed by Brian Erson:
𝐷∗𝑛∗𝐽
𝑚𝑝𝑟𝑜𝑝 = 𝑇
𝑠𝑝𝑒𝑐 ∗𝐿
Author: Kris Ezra
(A-8.2.2–3)
Alternative Designs – Lunar Transfer
Section A-8.2.2, Page 43
where mprop is the total propellant mass required, D is the mission duration in days, n is
the number of desaturation maneuvers per day, J is the maximum torque provided by the
reaction wheels (Nm), Tspec is an estimate of the specific thrust of the propellant for a
given engine (N-s/kg) and L is the moment arm of the desaturation device (m). This
equation assumes that each desaturation maneuver takes one second to perform and that
input values for Tspec are given in (N/kg) meaning that the mass in kg is the total mass
expelled by the engine in 1 second. Using this method, if the values in Table A-8.2.2-1
are applied, we find simply that the total mass for attitude desaturation is 6.287 kg and
the total mass for gimbaled main engine desaturation is 17.926 kg. These numbers
support our decision at the time the analysis was performed to select the fixed main
engine configuration. As a side note, the moment arm calculation for the main engine
found to be 0.3858 m arrives directly from the thrust projection onto the horizontal plane
containing the center of mass in Fig. A-8.2.2-2.
Table A-8.2.2-1: Variables used for total desaturation propellant mass calculations
Variable
Value
Units
Mission Length
365
Days
Desaturation Maneuvers
6
#/day
Max Reation Wheel Torque 0.03
Nm
H202 Specific Thrust
9.5
N/kg
Attitude Moment Arm
1.1
m
Engine Moment Arm
0.3858
m
Total mass (Attitude DS)
6.287081 kg
Total mass (Engine DS)
17.92584 kg
Author: Kris Ezra
Alternative Designs – Lunar Transfer
Section A-8.2.3, Page 44
A-8.2.3 – Attitude Alternatives
Hydrogen Peroxide vs. Hydrazine Attitude Control Thrusters
Shown below in Figures A-8.2.3-1 and A-8.2.3-2 are comparisons of the relative sizes
and masses between commercially-available hydrogen peroxide and hydrazine thrusters.
As you can see, the hydrogen peroxide thrusters are comparable in size to that of
hydrazine for similar thrust capabilities, but the hydrogen peroxide thrusters are less
massive than the hydrazine thrusters (Astrium).
Fig. A-8.2.3-1 Relative Size Comparison of Hydrogen Peroxide Thrusters (top three) to
Hydrazine (bottom seven)
(Brittany Waletzko)
Author: Brittany Waletzko
Alternative Designs – Lunar Transfer
Section A-8.2.3, Page 45
0.9
0.8
0.7
Mass (kg)
0.6
0.5
0.4
H2O2
0.3
Hydrazine
0.2
0.1
0
0
20
40
60
Thrust (N)
80
100
120
Fig. A-8.2.3-2 Thruster Mass Comparison
(Brittany Waletzko)
Tables A-8.2.3-1 and A-8.2.3-2 summarize more detailed information for basic two-way
valves and the thrusters considered.
Table A-8.2.3-1 Two-Way Valve Data
Criterion
Valve Mass
Valve Input
Size
Response Time
Value
0.363
18-30
17.8x15.2x5.1
<50
Units
kg
V
cm
ms
Table A-8.2.3-2 Hydrazine vs. Hydrogen Peroxide Thruster Data
Criterion
Thrust
Thruster Mass
Approximate
Cost (each)
Total System
Mass (4)
Hydrazine
1
0.09
H2O2
13.3
0.195
Units
N
kg
100,000
12,000
2009 USD
1.5
2.2
kg
Note: System Mass does not include propellant
Author: Brittany Waletzko
Alternative Designs – Lunar Transfer
Section A-8.2.3, Page 46
Electrothermal Hydrazine
Figures A-8.2.3-3 and A-8.2.3-4 show two basic schematics of the types of
electrothermal hydrazine thrusters mentioned in section 8.2.3.
Fig. A-8.2.2-3 Arcjet Schematic
(Delft University of Technology)
An arcjet thruster heats propellant into a high-temperature arc, and so electrode erosion
occurs, usually within 62 days. The thruster investigated is about 90% efficient, which
means that an input of 267 W dissipates 30 W. These systems are both electricallypowered, and so we require a PPU that calls for an additional 0.3 kW of power and has a
mass of roughly half a kilogram. The overall thruster mass is usually 0.18kg and has a
cathode diameter of 1.6mm (Delft).
Fig. B.8.2.2-4 Resistojet Schematic
(Delft University of Technology)
Author: Brittany Waletzko
Alternative Designs – Lunar Transfer
Section A-8.2.3, Page 47
A resistojet thruster offers almost 40% better performance than standard hydrazine
propellant without heating, but this heating configuration is variable. Between direct and
indirect heating, the method of indirectly heating the propellant yields a longer
operational life for the thruster. The mass of each thruster is approximately 0.36 kg
(Delft). A resistojet operates in either steady or pulsed mode, and is historically used for
stationkeeping and orbit adjustment. Both the INTELSAT and Iridium satellites employ
resistojets using hydrazine for these tasks and require about 0.5 kW per thruster. As we
mentioned in the main body of the report, this amount of power input is unacceptable for
our system and so this thrusting method is not chosen.
Author: Brittany Waletzko
Alternative Designs – Lunar Transfer
Section A-8.2.3, Page 48
Chemical Thrusters
In order to choose a proper propellant the advantages and disadvantages of each system
are considered. Hydrazine, 𝐻2 𝑂2 and cold Xe gas are compared and contrasted. After
analysis, we choose a 𝐻2 𝑂2 thruster for its low weight and cost as outlined in Table 8.2.33.
Table 8.2.3-3 Hydrogen Peroxide Specifications
Parameter
Density
Specific Impulse
Time per thrust
Specific thrust
Cost
Variable
ρ
Isp
T
F
C
Quantity
1.11
168
0.04
0.015
2
Unit
kg/L
sec
sec
N
$/kg
The integration requires a small increase in inert mass, but not enough to eliminate 𝐻2 𝑂2
from contention. The propellant is not currently used on the OTV, but the preceding
factors outweigh the possibility of using a different propellant. 𝐻2 𝑂2 is a stable, nontoxic
substance that has long term storability. The performance characteristics are adequate to
provide enough thrust to fulfill all mission requirements
Author: Brian Erson
Alternative Designs – Lunar Transfer
Section A-8.2.3, Page 49
Stabilization
The structure of our spacecraft relies heavily on the method of stabilization. Two
common techniques are analyzed in this section. Some positive and negative attributes of
each system are listed below in Table 8.2.3-4.
Table 8.2.3-4 Group system Attributes
Parameter
3-Axis
Spin
Attitude
Sun Sensors, Star Sensors,
Reaction Wheel
Large Solar Arrays
Doppler Data, Conical Scanner
Power
Propulsion
Com
Strct/Thrm
Sources of
Instability
H202 impulse
Unidirectional Antenna
Increased thermal protection
needed
Thrust Misalignment,
environmental perturbation
Small Efficient Solar Cells, Battery
Power
H202 impulse
De-spin pointing, high-gain antenna
“Barbecue Roll” decreases reliance on
thermal protection
Fuel Slosh Torque
Based on the above data, some mass numbers can be generated for each type of
stabilization. Table 8.2.3-5 below outlines these mass numbers.
Table 8.2.3-5 Mass Layout
Attitude Control
Power
Communication
Thermal
Structure/Prop
Total
3-Axis
40.1
40
3
17.1
500
600.1
unit
kg
kg
kg
kg
kg
kg
Spin
27.1
100
3
5
500
634.7
We choose a 3-axis stabilized system based on a mass savings of >34.6 kg.
Author: Brian Erson
unit
kg
kg
kg
kg
kg
kg
Alternative Designs – Lunar Transfer
Section A-8.2.4, Page 50
A-8.2.4 – Power Alternatives
Secondary Battery
The selection of the secondary battery came from comparing the different characteristics
of the chemical possibilities for these batteries. In Table A-8.2.4-1 a general comparison
is shown between for a few different chemical batteries. As we make the batteries as light
as possible, we limit our choices to batteries with very high energy densities. From the
comparison in Table A-8.2.4-1 the top two batteries are the lithium based compounds,
lithium–ion(Li-ion) and the lithium-ion polymer(Li-Poly). Between these two we narrow
our choice to the Li-ion because it has already been used in space for a long period of
time, and still are being used.
Table A-8.2.4-1 Comparison of Secondary Batteries.
Candidate
Wathours/kg
Watthours/l
Cycle Life
Used in
space
Li-ion
Li-Poly
130(145)*
150
200(358)*
> 10k
200
> 10k
SuperNiCd
50
115
> 45k
NiMH
Sodiumsulfur
65
120
200
> 10k
Since 2000
Not yet
Since 1990
NA
Source: Patel, Mukund R. “Spacecraft Power Systems.”
*Current Li-ion battery capabilities courtesy of Yardney
Author: Jeff Knowlton
250
> 3k
Experimental
flights
Alternative Designs – Lunar Transfer
Section A-8.2.4, Page 51
Fuel Cell Power
For long duration missions fuel cells are often used as the primary power source. They
have the advantages of long working life, efficiency up to 70%, and a high energy density
with a steady output. Disadvantages are their expense, complexity, and need for volatile
cryogenic fluids. The most common type for space missions uses an aqueous alkaline
technology which uses a potassium hydroxide electrolyte was preferred over the more
efficient proton exchange membrane (PEM) which, because the PEM has water
condensing on its cathode that is tricky to remove in zero gravity.
Patel
However newer
PEM’s are in development now.
Commercial fuel cells sell at approximately $3000 per kilowatt so cost isn’t that much of
an issue. Using the space shuttles cells as a basis, specific power is 120W/kg for the cell
alone with a density of 75W/liter at 28 volts (www.utcfuelcells.com). The fuel and
oxygen mixture has a useful specific energy of 3800W∙hr/kg. The working life is about
5000hrs.Figure A-8.2.4-1 shows a plot of total weight vs total energy. If a low thrust ion
drive is to be used the specific energy difference from an LEO to moon orbit will be
approximately 30000 J/kg or 8.33 kW∙hr/kg. That was assuming LEO at 6500 km and
moon orbit at 400,000 km from earth center and 100% efficiency for orbit transfer.
1600
Total Mass (kg)
1400
1200
1000
200W output
800
1000W output
600
2000W output
400
4000Woutput
200
0
0
2000
4000
Total Energy (kW/hr)
6000
Fig. A-8.2.4-1. Mass vs Energy for Fuel Cell
(Tony Cofer)
Author: Tony Cofer
Alternative Designs – Lunar Transfer
Section A-8.2.4, Page 52
For a 500 kg mass it would require about 4100 kW∙hr energy to move it to lunar orbit so
would need about 1000 kg of fuel cell and fuel which is cost prohibitive. A fuel cell could
possibly be used on the lander if it is going to be in a shaded region which though mass
friendly could seriously lower the mission success probability because of the complexity
of the equipment and the possibly abrupt nature of the landing. Figure A-8.4.2-2 is the
same graph with a close up at the lower end of the energy scale. Masses were calculated
with a 5% addition to the fuel mass to compensate for tanks.
Another possible disadvantage for using fuel cells on this mission could be maintenance.
The cells have to be purged of contaminants twice daily and the products of reaction have
to be expelled as they would be dead weight. If something gets clogged there is no one
there to give it a kick.
100
90
Total Mass (kg)
80
70
60
200W output
50
1000W output
40
2000W output
30
4000Woutput
20
10
0
0
50
100
150
200
Total Energy (kW/hr)
250
Fig. A-8.4.2-2. Mass vs Energy for Fuel Cell
Author: Tony Cofer
Alternative Designs – Lunar Transfer
Section A-8.2.4, Page 53
Nuclear Power
Nuclear power on spacecraft has been used primarily on missions past the orbit of Mars
where solar power is impractical; or where there are extended periods of darkness. Power
outputs for these systems have always been less than 1 kW electrical. Table A-8.2.4-2
shows power and specific power for some RTG’s that have been used.
Table A-8.2.4-2 RTG’s in Use (Fortesque)
Spacecraft
Power (W)
Cassini (1997)
Galileo (probe)/Ulysses
Nimbus/Viking/Pioneer (SNAP 19)
SNAP-27
SNAP 9A
628
285
35
25
73
kg/kW
195
195
457
490
261
This table shows that the best specific power is only about 5 watts per kilogram or about
one thirtieth that of solar power at this distance from the sun. For a 200 kW system we
would need 39000 kg for power. Those listed are radio-thermal generator (RTG) type
which incorporate plutonium 238 as a fuel, have been used exclusively since the 1960’s.
System Nuclear Auxiliary Power (SNAP) units using uranium fission were developed in
the early 1960’s but only the SNAP-10A was ever space tested. Table A-8.2.4-3 shows
the power and specific power for American fission systems.
Author: Tony Cofer
Alternative Designs – Lunar Transfer
Table A-8.2.4-3
System
SNAP-2
SNAP-8
SNAP-10
Section A-8.2.4, Page 54
Uranium Fission Systems Angelo
Power
(kW)
3
35
0.5
kg/kW
182
590
130
These designs were abandoned because RTG’s had nearly the same power density but
weren’t nearly as complex and these things used a molten sodium-potassium mixture as a
primary coolant and mercury in the secondary heat exchanger.
The biggest disadvantage of RTG’s is the price. Plutonium 238 is a man made element
which has not been produced in the USA since the late 1980’s. Russia is the only source
for it and they have only a limited amount. The price for RTG’s vary from as little as
$7,000/W to as much as $50,000/W depending on how much the Russians feel like
charging. Even assuming the low end our 200 kW system would require 1.4 billion
dollars. The U.S. plans to resume production but not until 2011 (Miotla).
Author: Tony Cofer
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 55
A-8.3 - Lunar Descent Alternative Designs
A-8.3.1 – Landing Alternatives
High Energy Tangent Landing
The High Energy Tangent Landing (HETL) involves simple physics calculations. The
slide distance is calculated using one dimension kinematic equations that were dependent
on Newtonian mechanics. The first step is to solve for the normal force exerted on our
lander by the Moon. The normal force can be calculated using:
𝑁 = 𝑚 ∗ (𝑔𝑚 + 𝑎𝑣 )
A-8.3.1-1
where N is the normal force, m is the mass of our Lander, gm is the acceleration due to
gravity on the Moon, and av is the vertical acceleration of our Lander at impact. The mass
of the Lander used was the dry mass of a past iteration. The vertical acceleration was
based on three vertical g loads at landing. The g loads used were 10, 15 and 20 g’s.
Next the frictional force on the Lander by the Moon is calculated by combining
Eq. (A-8.3.1-1) with:
𝐹𝑓 = 𝑁 ∗ 𝜇𝑓
A-8.3.1-2
where Ff is the frictional force and μf is the coefficient of friction of the Lunar regolith.
For this calculation μf was set as 0.18 (Creel).
Third, the horizontal acceleration is calculated by combining Eq. (A-8.3.1-2) with:
𝑎ℎ =
𝐹𝑓⁄
𝑚
A-8.3.1-3
Next the slide time is calculated, assuming that the horizontal acceleration is constant and
equal to the initial acceleration, by combining Eq. (A-8.3.1-3) with:
𝑣
𝑡 = ℎ⁄𝑎ℎ
A-8.3.1-4
where vh is the horizontal velocity at the time of landing.
Finally the slide distance is calculated by combining Eq. (A-8.3.1-3), Eq. (A-8.3.1-4),
and:
𝑥 = 𝑣ℎ ∗ 𝑡 − 1⁄2 ∗ 𝑎ℎ ∗ 𝑡 2
Author: Trenten Muller
A-8.3.1-5
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 56
Accordion
The communication equipment was found to take the least amount of force on the Lunar
Lander, 10 g’s. One “g” is equal to the force of gravity on the Earth, 9.80665 meters per
second2. We find the forces acting on a three-dimensional object may cause deformation,
causing additional stress forces within the object. Newton’s second law tells us that the
net force on an object is equal to the rate of which its momentum changes:
𝐹=
∆𝑝
∆𝑡
(A-8.3.1-6)
where F is the force found by the change of momentum, p, divided by the change of time,
t.
By the definition of momentum force can be found in the second equation below:
∆𝑝 = ∆(𝑚𝑣)
(A-8.3.1-7)
where m is the mass of the object and v is the velocity.
𝐹=
∆(𝑚𝑣)
∆𝑣
=𝑚
∆𝑡
∆𝑡
(A-8.3.1-8)
Therefore the longer the contact time, the less the force on the object will be. Contact
time can be increased by causing deformation in the object. The more deformation of the
object, the greater the contact time, as seen below:
∆𝑡 = 𝑥⁄𝑣𝑎𝑣𝑒
(A-8.3.1-9)
where t and v are time and velocity, as before, and x is the length of deformation.
Author: Caitlin Mckay
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 57
The amount of force on an object can then be found by:
∆𝑣
𝑣
𝐹 = 𝑚𝑥
= 𝑚𝑥
⁄𝑣𝑎𝑣𝑒
⁄𝑣⁄
2
𝑣2
=𝑚
2𝑥
(A-8.3.1-10)
From Eq. (A-8.3.1-10) we can show that the greater the deformation of an material, x,
the less amount of force exerted on the object. Using a honeycomb material at the
bottom of the Lunar Lander would increase the amount of material will deform while not
adding as much mass if it was just solid. We can see an example of the honeycomb core
in Figure A-8.3.1-1 below.
Fig. A-8.3.1-1 Honeycomb core schematic
(Caitlyn McKay)
The deformation of an object is greatest when there is a failure mode. There are three
typical failure modes when using a honeycomb material, facing failure, transverse shear
failure, and local crushing of the core (Wijker, 2008). Facing failure occurs in either the
compression or tension of the face sheet, caused by insufficient panel thickness, face
sheet thickness or face sheet strength. Transverse shear failure is caused by insufficient
core strength or panel thickness.
compression strength.
Local crushing of core is caused by low core
The different failure modes are caused by different stresses,
bending, tensile, compression, and shear. Properties of the material cause different
material strengths and different failure modes. All of the honeycomb cores looked at are
made of aluminum alloy 5056 with Poisson’s ratio of 0.3, we find other properties are
found in Table A-8.3.1-1.
Author: Caitlin Mckay
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 58
Table A-8.3.1-1 Honeycomb core properties
Type of Honeycomb
core
1/4-5056-.002p
3/8-5056-.0007p
1/4-5056.0015p
1/4-5056-.0007p
3/16p5056-.002p
Diameter of Cell
(mm)
6.4
9.6
6.4
6.4
4.8
Density
(kg/m3)
69
16
54
26
91
Compressive strength Ec
(MPa)
3.21
0.24
2.17
0.55
5.07
The compression stress of the honeycomb is given by:
𝜎𝑥,𝑓 =
𝑁𝑥
2𝑡𝑓
(A-8.3.1-11)
where Nx is the constant running load in (N/m) and tf is the thickness of the face sheets.
The critical value Nx,cr of the running load per unit of circumference of a long cylinder
we find by:
𝑁𝑥,𝑐𝑟 = 𝛾
2𝐸𝑓
ℎ𝑐 𝑡𝑓
√(1−𝑣𝑓2 )
𝑅
{1 −
𝐸𝑓
𝑡𝑓
𝑅𝐺
2√(1−𝑣𝑓2 ) 𝑐
}
(A-8.3.1-12)
where Ef is the Young’s modulus, vf is Poisson’s ratio, hc is the core height, R is the mean
radius of the cylinder, γ is the knock down factor, and Gc is the shear modulus of the
core.
The shear modulus of the core can be found by the equation below. Table A-8.3.1-2
shows the shear modulus of the core for the different types of honeycomb core.
Author: Caitlin Mckay
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 59
(A-8.3.1-13)
𝐺𝑐 = √𝐺𝐿 𝐺𝑇
where GL and GT are material properties of the honeycomb core.
Table A-8.3.1-2 Shear modulus of honeycomb cores
Type of Honeycomb core
1/4-5056-.002p
3/8-5056-.0007p
1/4-5056.0015p
1/4-5056-.0007p
3/16p5056-.002p
GL (MPa)
462
103
345
138
648
GT (MPa)
186
62
152
83
248
The knock down factor relates to initial imperfections and given by:
𝛾 = 1 − 0.901(1 − 𝑒 −𝜙 )
Gc (MPa)
293
80
229
107
401
(A-8.3.1-14)
where is found by:
√2 𝑅
√
𝜙=
29.8 ℎ𝑐
(A-8.3.1-15)
The assumption for the force exerted on the Lunar Lander is there would be complete
deformation of all hollow areas in the global buckling of the core. For the following
information the Lunar Lander used in the Matlab code theAccordion.m, has a dry mass of
230.8 kg excluding the material being deformed, radius of 1 meter, and a plate face
thickness of 0.001 meters.
The velocity that the Lunar Lander would hit the surface of the moon with the force of 10
Earth G’s is different for the different types of material as seen in Figures A-8.3.1-2 and
A-8.3.1-3, and Table A-8.3.1-3 below.
Author: Caitlin Mckay
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 60
Fig. A-8.3.1-2: The velocity the lunar lander can hit the
surface of the moon with a force of 10 Earth G’s with the
length of honeycomb material underneath that is crushed.
(Caitlyn McKay)
Fig. A-8.3.1-3: The velocity the Lunar Lander can hit the
surface of the moon with a force of 10 Earth G’s with the mass
of honeycomb material underneath that is crushed.
(Caitlyn McKay)
Author: Caitlin Mckay
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 61
Table A-8.3.1-3 Honeycomb core length and mass of material crushed at different velocities for a force of
10 Earth G’s
Honeycomb
core
1/4-5056.002p
3/8-5056.0007p
1/4-5056.0015p
1/4-5056.0007p
3/16-5056.0002p
1 m/s
2 m/s
3 m/s
5 m/s
10 m/s
15 m/s
1.164 m
20 m/s
0.0254m
0.0508 m
0.0762 m
0.1300 m
0.518 m
2.070 m
5.50 kg
0.0252m
11.02 kg
0.0505 m
16.53 kg
0.0759 m
28.18 kg
0.1283 m
112.17 kg
0.512 m
252.13 kg 448.07kg
1.151 m 2.050 m
1.25 kg
0.0253m
2.54 kg
0.0507 m
3.81 kg
0.0761 m
6.45 kg
0.1295 m
25.74 kg
0.516 m
57.87 kg 102.84kg
1.161 m 2.065 m
4.30 kg
0.0253m
8.61 kg
0.0506 m
12.91 kg
0.0759 m
21.98 kg
0.1285 m
87.53 kg
0.513 m
196.75 kg 349.67kg
1.154 m 2.055 m
2.06 kg
0.0255m
4.13 kg
0.0509 m
6.20 kg
0.0764 m
10.51 kg
0.1305 m
41.91 kg
0.520 m
94.22 kg 167.46kg
1.168 m 2.080 m
7.27 kg
14.55 kg
21.84 kg
37.34 kg
148.59 kg
333.95 kg 593.45kg
As seen from Figure A-8.3.1-2 and Table A-8.3.1-3, the length of the honeycomb core
that would attach to the bottom of the Lunar Lander does not vary greatly between
different core types. The mass, however, varies greatly as seen from Figure A-8.3.1-3
and Table A-8.3.1-3. The mass and lengths added on are not the only variable to
consider, the structure will also need to endure a global buckling failure. There were
only two types of honeycomb cores that would fail, 3/8-5056-.0007p and 1/4-5056.0007p, as seen in Figure A-8.3.1-4. These two kinds of honeycomb core also happened
to be the lightest and needed the least amount of length added.
Author: Caitlin Mckay
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 62
Fig. A-8.3.1-4 Length of material to be crushed in meters
(Caitlyn McKay)
Analysis indicated that honeycomb core 3/8-5056-.0007p would add the least amount of
length and would be the lightest while still deforming with the force of 10 Earth G’s.
Using a basic kinematic equation below, the distance the Lunar Lander would be able to
free fall was determined as seen in Figures A-8.3.1-5 and A-8.3.1-6
.
𝑣2
𝑑 = 2𝑎
(A-8.3.1-16)
where d is the distance of the free fall, v is the velocity the Lunar Lander would be with a
force of 10 Earth G’s, and a is the acceleration which is equal to the gravity of the moon,
one sixth of Earth’s gravity.
Author: Caitlin Mckay
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 63
Fig. A-8.3.1-5 Distance the Lunar Lander could free
fall in meters versus the length in meters of material to
be deformed in order to land with a force of 10 Earth
G’s
(Caitlyn McKay)
Fig. A-8.3.1.6 Distance the Lunar Lander could free fall in
meters versus the mass in kg of material to be deformed in
order to land with a force of 10 Earth G’s
(Caitlyn McKay)
Author: Caitlin Mckay
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 64
From the data we determined that the mass added to the Lunar Lander for the crushable
core to slow impact time was greater than that of the fuel that would be saved. Other
materials could have been looked into, but a concern would be that the material would
have to be strong enough to withstand the 8.5 Earth G’s of launch. The Lunar Lander
could be supported during launch, but that would add more complexity and weight to the
orbital transfer vehicle. Even if the mass of the core was not a problem, the fact that the
crushable material has to be below the engine is a nuisance, not to mention that the
material would only buckle globally once which would not work for the 10 kg payload
vehicle. It was decided that incorporating shocks into the legs of the Lunar Lander would
be simpler than dealing with these problems.
Author: Caitlin Mckay
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 65
Gas Spring Landing Gear
As discussed in Section 8.3.1, the possibility of using gas springs to capture and store
some of the kinetic energy of the Lunar Lander during descent for later use in locomotion
was explored. Initially, we examined how much locomotion distance could be obtained
by bouncing on springs. The Excel file Preliminary_Spring_Hop.xls incorporates basic
conservation of kinetic and spring potential energy along with particle kinematics to
estimate the potential distance achieved by bouncing. Early analysis was promising that
some or all of the required locomotion could be achieved with orbital kinetic energy
stored in gas springs. However, further research into gas springs revealed that gas
springs have temperature and acceleration limits that are exceeded during our lunar
landing (Enidine, 2009). The gas spring landing gear alternative was discarded for these
reasons.
Author: Christine Troy
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 66
Momentum Transfer
Finding the feasibility of the momentum transfer alternative is a relatively
straightforward task using basic work-energy principles. We analyze the system of the
dry OTV and Lander apart from the Earth and the Moon to see what kinds of
accelerations are required to stop the Lander over a given distance without considering
external factors. At the stage of development when we analyzed this alternative, the mass
of the dry OTV was 251 kg, the mass of the Lander was 149.3 kg and the orbital velocity
was 1.7 km/s.
We begin by observing the work-energy theorem which states that work done on a
system is equivalent to the change in energy of that system.
𝑊 = ∆𝐸
(A-8.3.1-17)
In this case, we would like the Lander to have a change in energy exactly equal to its
kinetic energy. That is, we want to take the Lander moving at orbital velocity and stop it.
In mathematical terms,
∆𝐸 =
1
2
𝑚
𝑣
−
2 𝐿𝑎𝑛𝑑𝑒𝑟 𝐿𝑎𝑛𝑑𝑒𝑟
1
𝑚
02 =
2 𝐿𝑎𝑛𝑑𝑒𝑟
1
2
𝑚𝐿𝑎𝑛𝑑𝑒𝑟 𝑣𝐿𝑎𝑛𝑑𝑒𝑟 2
(A-8.3.1-18)
Our constraints dictate that the Lander cannot be subjected to more than 10 Earth g’s
without destroying communications equipment, so the net acceleration for this change in
energy must be less than 10 times the acceleration of Earth’s gravity. We also know that,
by definition, work is the integral of applied force over a distance and, if we assume the
Lander travels in a straight line over our collision/explosion that expels the dry OTV,
𝑊 = 𝐹𝑙𝑎𝑛𝑑𝑒𝑟 𝑑𝑐𝑜𝑙𝑙𝑖𝑠𝑖𝑜𝑛 = 𝑚𝐿𝑎𝑛𝑑𝑒𝑟 𝑎𝐿𝑎𝑛𝑑𝑒𝑟 𝑑𝑐𝑜𝑙𝑙𝑖𝑠𝑖𝑜𝑛
Author: Kristopher Ezra
(A-8.3.1-19)
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 67
Where FLander is the force on the Lander, dcollision is the collision distance, mLander is the
Lander mass, and aLander is the acceleration the Lander experiences. By coupling these
equations, we find that
𝑚𝐿𝑎𝑛𝑑𝑒𝑟 𝑎𝐿𝑎𝑛𝑑𝑒𝑟 𝑑𝑐𝑜𝑙𝑙𝑖𝑠𝑖𝑜𝑛 =
1
2
𝑚𝐿𝑎𝑛𝑑𝑒𝑟 𝑣𝐿𝑎𝑛𝑑𝑒𝑟 2
(A-8.3.1-20)
which simplifies to
𝑎𝐿𝑎𝑛𝑑𝑒𝑟 =
𝑣𝐿𝑎𝑛𝑑𝑒𝑟 2
2𝑑𝑐𝑜𝑙𝑙𝑖𝑠𝑖𝑜𝑛
(A-8.3.1-21)
From this equation, we obtain Fig. A-8.3.1-7 by inserting various collision distances and
dividing the resultant acceleration by the acceleration of gravity on Earth.
Author: Kristopher Ezra
Alternative Designs – Lunar Descent
5
3
Section A-8.3.1, Page 68
Work/Energy Based Accelerations
x 10
2.5
Accelleration (g)
2
1.5
1
0.5
0
0.5
1
1.5
2
2.5
3
3.5
Collision Distance (m)
4
4.5
5
Fig. A-8.3.1-7: Plot of the acceleration the Lander is subjected to versus the collision distance
required to slow the Lander from 1.7 km/s to 0 km/s. These accelerations are in multiples of Earth's
gravity (g's).
(Kristopher Ezra)
It is easy to see that, for a collision of less than 2 m, the accelerations are much higher
than 10 Earth g’s. Since the collision (explosion) must be contained in the dry OTV and
Lander system, it must occur over a distance less than approximately 2 m. For this
reason, we can discard the momentum transfer alternative.
Author: Kristopher Ezra
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 69
Spinning Tether
Evaluating the plausibility of the spinning tether alternative requires analysis based on
work-energy relations, forces, kinematics, and dynamics. As in other landing alternative
cases, the driving factors of this analysis are maintaining an acceleration on the Lander
that does not exceed 10 g’s, slowing the Lander from an orbital velocity of 1.7 km/s, and
using less mass than the descent propellant required to land directly from orbit. We begin
this analysis by making some additional assumptions.
First, we assume the tether
connecting the Lander and the dry OTV is Kevlar with a circular cross section. From this
assumption we see that Kevlar has a tensile strength of 3.4 GPa and a density of 1470
kg/m3 (about.com). We also assume that a small portion of the mass of the Lander as it is
currently designed could be transferred to the OTV. To maximize the linear speed of the
Lander as it rotates, we would like the center of mass as far from the Lander as possible
since the whole system rotates about the center of mass. Finally, we assume that the
tether length should be sufficiently long that the Lander and dry OTV behave as point
masses. For the duration of this analysis, external forces (specifically the gravitational
attraction of the Earth and the Moon) are neglected.
Due to the open ended nature of this problem, we begin by making a reasonable
assumption at calculating the necessary cross sectional area of the tether. The tensile
strength of Kevlar drives this calculation but, because we want to assure the success of
the tether, we also include a safety factor of 1.25. From the safety factor and the tensile
strength, we can calculate the maximum stress allowed in the tether, and, based on the
maximum allowed acceleration of 10 g’s for the Lander, we compute the maximum
tensile force which provides a direct solution for cross sectional area. This is outlined in
the equation:
𝜎𝑡𝑒𝑛𝑠𝑖𝑙𝑒 × 𝑛 =
𝑚𝐿𝑎𝑛𝑑𝑒𝑟 × 𝑎𝑚𝑎𝑥
𝐴
Author: Kristopher Ezra
(A-8.3.1–22)
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 70
Where 𝜎𝑡𝑒𝑛𝑠𝑖𝑙𝑒 is the tensile strength of Kevlar, 𝑛 is the safety factor of 1.25, mLander is the
mass of the lander, amax is the maximum acceleration of 10 g’s, and A is the cross
sectional area of the tether.
Using the values in Table A-8.3.1-4, we see that the required cross sectional area is
5.3828 mm2.
Table A-8.3.1-4: Constant values used to determine the
cross sectional area of the Kevlar tether.
Variable
Value
Units
σtensile
3.4
GPa
n
1.25
N/A
mLander
149.3
kg
amax
10
g
Once we have obtained a value for the cross sectional area of the tether, it is possible to
iterate through possible tether lengths and calculate mass and moment properties. We
first calculate the position of the center of mass of the tether by means of the following
equation:
𝑥̅ =
∑ 𝑚𝑖 𝑥𝑖
𝑚𝑡𝑜𝑡𝑎𝑙
(A-8.3.1–23)
Where mi is the mass of a section of tether or a component, xi is the distance of that
component from the Lander, and mtotal is the total mass of the system (Lander, dry OTV
and tether).
Once we have a position of the center of mass, we then compute the moments of inertia
of the sections of the tether and the two point mass components about that position. We
note that the equations for the moment of inertia about the endpoint of a cylinder and the
Author: Kristopher Ezra
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 71
moment of inertia of a point mass about a given distance are equations A-8.3.1–24 and
A-8.3.1–25 respectively.
1
𝜌𝐴3
(A-8.3.1–24)
𝐼𝑝𝑜𝑖𝑛𝑡 𝑚𝑎𝑠𝑠 = 𝑚𝑟 2
(A-8.3.1–25)
𝐼𝑐𝑦𝑙𝑖𝑛𝑑𝑒𝑟 =
3
Where ρ is the density of the material, A is the cross sectional area of the cylinder, m is
the mass of the point mass, and r is the distance of that mass from the point of interest.
The only remaining point to address is calculating the actual linear velocity we predict
the Lander to have as the tether spins. To accomplish this, we simply equate the circular
acceleration of the Lander about the center of mass to the maximum allowable
acceleration. If we use the maximum acceleration, we ensure that the tether length is as
short as possible and we achieve maximum savings. This is expressed succinctly in the
following equation:
𝑎𝑚𝑎𝑥 =
𝑣2
𝑟
→ 𝑣 = √𝑎𝑚𝑎𝑥 𝑟
(A-8.3.1–26)
Where amax is is the maximum allowable acceleration of 10 g’s, r is the distance of the
Lander from the center of mass, and v is the equivalent linear speed of the Lander.
From these parameters, we can iterate though different tether lengths to find the
feasibility of the alternative. Figure A-8.3.1-8 addresses the tether length required for our
given orbital velocity of the tether, Lander, dry OTV system. It indicates a required
tether length of approximately 50 km for the anticipated speed of 1.7 km/s.
Author: Kristopher Ezra
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 72
Linear Velocity vs Tether Length
2
Magnitude of Linear Velocity (km/s)
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
10
20
30
40
Tether Length (km)
50
60
Fig. A-8.3.1-8: This figure shows a plot of the calculated linear velocity of the Lander versus
the length of the tether which connects the Lander to the dry OTV.
(Kristopher Ezra)
Using the tether length and the cross sectional area, we calculate the mass savings in Fig.
A-8.3.1-9. This value is computed by subtracting the mass of the tether from the mass of
what would be the descent propellant (75 kg). As the figure shows, the tether becomes
impractical with respect to mass at a length of approximately 10 km.
Author: Kristopher Ezra
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 73
Mass Savings
100
50
0
Mass Savings (kg)
-50
-100
-150
-200
-250
-300
-350
-400
0
10
20
30
40
Tether Length (km)
50
60
Fig. A-8.3.1-9: This figure illustrates the total mass savings of the tether over the descent propellant.
Values less than zero indicate that the tether has a mass higher than the propellant (75 kg).
(Kristopher Ezra)
At this point we have officially disproved the spinning tether alternative since the mass
required for a 50 km tether is approximately 325 kg more than the mass of the descent
propellant. However, to completely disprove the alternative without respect to the mass,
we consider the rotational kinetic energy to spin the 50 km tether such that the Lander
moves at orbital velocity. To address this question, we simply divide the linear velocity
of the Lander by its distance from the center of mass to find angular speed, then employ
equation A-8.3.1-27 to calculate the rotational kinetic energy.
1
𝑇𝑟𝑜𝑡 = 2 𝐼 𝑤 2
(A-8.3.1–27)
Where Trot is the rotational kinetic energy, I is the moment of inertia of the system about
the center of mass, and w is the angular velocity of the tether about the center of mass.
Using this equation and values from various tether lengths, we produce Fig. A-8.3.1-10
which illustrates the energy cost to spin the tether at the required rate in kilojoules. Since
Author: Kristopher Ezra
Alternative Designs – Lunar Descent
Section A-8.3.1, Page 74
there is not apparent non-trivial method of producing 5.5 x 105 kilojoules of energy
besides carrying more propellant, we discard this alternative.
5
8
Energy Cost
x 10
Energy Required for Spin Up (kJ)
7
6
5
4
3
2
1
0
0
10
20
30
Tether Length(km)
40
50
60
Fig. A-8.3.1-10: This figure shows the energy required to spin the tether to the desired
angular rate in kJ. Since this energy is not free and the value is so large, we discard the
alternative.
(Kristopher Ezra)
Author: Kristopher Ezra
Alternative Designs – Lunar Descent
Section A-8.3.2, Page 75
A-8.3.2 - Structural Alternatives
Structures— Design
Although we use the same basic Lander frame for all three payload cases, there are
variations in each frame design. The frame for the 100g payload Lander found in Figure
5.4.1-1 is the basic frame design that both the 10kg payload frame and arbitrary payload
frame stem from.
The basic frame design is not sufficient for the 10kg payload frame because of the
addition of the two engines needed for the hop. The basic frame alters to account for
these engines. The alternate design to account for these two hop engines uses the basic
frame design for the 100g case and adds two rings for the engine nozzles and two trusses
to support the chambers during engine firing. Brief analysis of these rings and thrusters
leads to an addition of 5 kg extra mass to the basic frame design.
Section 8.3.5 describes the alternate frame designs examined for the Lander frames. Our
frame selection analysis finds that four rectangular floor supports and four side support
beams yields the lowest values for total frame mass. Table A-8.3.2-1 lists the masses of
these individual frame components as the number of frame components are varied for the
100g payload frame and Table A-8.3.2-2 for the 10kg payload frame.
Table A-8.3.2-1 Mass of Structural Alternatives for the 100g payload frame
Mass for Specified Number of
Frame Component
Structural Component
3
4
5
Units
Rectangular Floor Beams
4.38
4.31
4.79
kg
Side Support Beams
0.68
0.63
0.68
kg
Table A-8.3.2-2 Mass of Structural Alternatives for the 10kg payload frame
Mass for Specified Number of
Frame Component
Structural Component
3
4
5
Units
Rectangular Floor Beams
9.29
9.14
10.16
kg
Side Support Beams
0.84
0.78
0.84
kg
Author: Ryan Nelson
Alternative Designs – Lunar Descent
Section A-8.3.3, Page 76
A-8.3.3 – Trajectory Alternatives
Linear Tangent Steering Law
Although our final mission descent trajectory employs a relatively simple radial/vertical
burn scheme, other descent trajectories were considered. The most promising of these
alternatives analyzed was the linear tangent steering law (LTSL), as presented to us by
James M. Longuski, Professor of Astrodynamics, Purdue University. The goal of this
section is to describe the analysis that was performed using the LTSL method, as well as
illustrate the cost-benefit conclusions of the analysis. Finally, we will explain why the
radial/vertical burn scheme was chosen for all three mission configurations.
The linear tangent steering law reduces analysis of a launch or descent to a two
dimensional problem. The variable of interest determined using the LTSL is the angle at
which a spacecraft is thrusting, here we use 𝜃, as a function of time. With initial inputs
of spacecraft acceleration, magnitude of applied gravity field, and desired orbit, the LTSL
is used to find the function 𝜃(𝑡). In this analysis, we assume spacecraft acceleration, f, is
constant. This allows integration of the EOM’s, resulting in an analytically solvable
system of equations. Although assuming f remains constant makes this analysis easier, it
also has the major drawback of not realistically representing our system, as we will
discuss at the conclusion of this section. Figure A-8.3.3-1 provides an overview of the
problem; y is in the vertical direction pointing up from the surface of the moon.
y
f
𝜃
g
x
Fig. A-8.3.3-1. Overview of descent from
parking orbit to landing, which is at the origin
in this figure.
(John Aitchison)
Author: John Aitchison
Alternative Designs – Lunar Descent
Section A-8.3.3, Page 77
From Professor Longuski’s presentation on the linear tangent steering low, for the Lunar
Lander we calculate the x and y components of position and velocity as a function of 𝜃,
𝜃0 , a, and f.
𝑥(𝜃) =
𝑓
𝑡𝑎𝑛𝜃 + 𝑠𝑒𝑐𝜃
{ln (
) 𝑡𝑎𝑛𝜃 + 𝑠𝑒𝑐𝜃0 − 𝑠𝑒𝑐𝜃}
2
𝑎
𝑡𝑎𝑛𝜃0 + 𝑠𝑒𝑐𝜃0
(A-8.3.3-1)
𝑦(𝜃)
𝑓
{(𝑡𝑎𝑛𝜃0 − 𝑡𝑎𝑛𝜃)𝑠𝑒𝑐𝜃0 − (𝑠𝑒𝑐𝜃0 − 𝑠𝑒𝑐𝜃)𝑡𝑎𝑛𝜃
2𝑎2
𝑡𝑎𝑛𝜃 + 𝑠𝑒𝑐𝜃
𝑔
+ ln (
)} − 2 (𝑡𝑎𝑛𝜃 − 𝑡𝑎𝑛𝜃0 )2
𝑠𝑒𝑐𝜃0 + 𝑡𝑎𝑛𝜃0
2𝑎
=
(A-8.3.3-2)
𝑣𝑥 (𝜃) =
𝑓
𝑡𝑎𝑛𝜃 + 𝑠𝑒𝑐𝜃
ln(
)
𝑎 𝑡𝑎𝑛𝜃0 + 𝑠𝑒𝑐𝜃0
(A-8.3.3-3)
𝑣𝑦 (𝜃) =
𝑓
𝑔
(𝑠𝑒𝑐𝜃 − 𝑠𝑒𝑐𝜃0 ) − (𝑡𝑎𝑛𝜃 − 𝑡𝑎𝑛𝜃0 )
𝑎
𝑎
(A-8.3.3-4)
where 𝜃0 is the initial launch angle, or in our case the final landing angle theta and all
other variables as described earlier. Note that these equations require inputs of f, a, g, 𝜃,
and 𝜃0 . In order to obtain a descent trajectory, we make a guess for 𝜃0 , use a upper
maximum acceleration that the Lunar Lander can achieve, and get a function for theta
over time.
Please see the Matlab codes LinearTangentSteeringLaw.m as well as
LinearTangentSteeringLaw_func.m for the process used to accomplish this.
After using the LTSL to determine an optimized function for theta, the amount of
propellant used was compared to that required of our radial/vertical burn scheme. In each
case, the flight times using the LTSL were much greater than those obtained using the
radial/vertical burn scheme. These longer burn times using the LTSL resulted in higher
propellant masses based on a constant mass flow assumption. The LTSL did, in cases
where we started descent from very high altitudes, result in propellant savings. These
savings were seen when descent started altitudes above approximately 40 km.
Author: John Aitchison
Alternative Designs – Lunar Descent
Section A-8.3.3, Page 78
As a result of the lower propellant mass usage of the radial/vertical burn scheme, we
chose not to use the LTSL. Although the LTSL did provide propellant savings when
starting descent at high altitudes, the total propellant usage from descent at low altitudes
trumped these savings. Also, a significant note is that the LTSL analysis assumed
constant acceleration of the spacecraft. This simplification would have significantly
reduced the validity of the descent trajectory analysis. Using the radial/vertical burn
scheme, we were able to model acceleration as a function of time using precise equations
of motion, which provided a more accurate model of the Lunar Lander descent.
Author: John Aitchison
Alternative Designs – Lunar Descent
Section A-8.3.5, Page 79
A-8.3.4 – Propulsion Alternatives
A-8.3.5 – Attitude Control
Spin Stabilized Lunar Lander
An axis-symmetric spacecraft spinning around its axis of symmetry remains fixed in
inertial space. This behavior is useful for the attitude control of spacecraft. We perform
analysis to determine the suitability of spin stabilization for attitude control on the Lunar
Lander. The spinning motion of an axis-symmetric spacecraft is described by Euler’s
equations of motion (Howell, 2008)
M 1 I1 ( J I ) 23
(A-8.3.5-1)
M 2 I 2 ( I J )13
(A-8.3.5-2)
M 3 J 3
(A-8.3.5-3)
where M is the moment applied to the vehicle, I is the spacecraft’s transverse moment of
inertia, J is the axial moment of inertia, and ω is the components of the spacecraft’s spin.
Figure A-8.3.5-1 shows the axes of the vehicle.
b3
ω3
b2
b1
Moffset
Figure A-8.3.5-1: Axes definition for spin stabilized Lander.
(Christine Troy)
Author: Christine Troy
Alternative Designs – Lunar Descent
Section A-8.3.5, Page 80
We assume that the thrust-offset torque acts only in the 1-direction so Eqs. A-8.3.5-1, A8.3.5-2, and A-8.3.5-3 can be solved for the spins as shown in in the following where
Moffsest is the thrust-offset torque.
1
M offset
IJ
2 3
I
I
(A-8.3.5-4)
2
(I J )
1 3
I
(A-8.3.5-5)
3 0
(A-8.3.5-6)
We use Matlab to simulate these equations in SpinDescent.m and eomSpinDescent.m.
By trial and error using these codes, the spin around the 3-axis necessary to maintain a 1˚
pointing of the spin axis is 2.6π rad/s.
We also use Euler’s equations of motion to calculate the amount of propellant needed to
spin up the Lunar Lander. Using Eq. A-8.3.5-3 we set M3 equal to the force of the
attitude thruster times the distance from the thruster to the center of mass. We integrate
once to find the time history of the spin rate as given here
3
FLt
J
(A-8.3.5-7)
where L is the distance from the thruster to the center of mass, F is the force of the
thruster, and t is time.
Combining the definition of Isp (given below) with Eq. A-8.3.5-7 we can solve for the
mass of propellant needed to spin up the Lander. The result is 0.67 kg of propellant.
Isp
F
gm
(A-8.3.5-8)
Author: Christine Troy
Alternative Designs – Lunar Descent
m prop _ spinup m t
Section A-8.3.5, Page 81
J
J
F
* 3 3
gIsp FL
gIspL
(A-8.3.5-9)
During the powered descent, we must reorient the Lunar Lander from a horizontal
position to a vertical position relative to the lunar surface.
The amount of propellant
needed for this axis reorientation is given as (Wiesel, 1997)
m prop _ reorient
J 3
gIspL
(A-8.3.5-10)
where θ is the angle through which the spin axis is reoriented in radians.
The total propellant savings using the spin stabilized Lander instead of the 3-axis
stabilized scheme is approximately 2.2 kg. As discussed in Section 8.3.5, however,
extensive modifications to the landing gear and descent engine would require an increase
in mass great than the mass saved in propellant. We chose 3-axis stabilization because
spin stabilization has no mass benefit but increases the complexity and risk of the
landing.
Author: Christine Troy
Alternative Designs – Lunar Descent
Section A-8.3.6, Page 82
A-8.3.6 – Thermal Control Alternatives
Thermal- Active Control
The active thermal control was ventured in the beginning stages of the lander design.
This avenue quickly became unreasonable. The data for a NGST MPT cryocooler was
originally explored. The cryocooler could remove 1.2 Watts from the lander. This would
mean several coolers would be necessary to remove all the waste heat in the lander. The
problem associated with this was the coolers required 40 Watts of power to run and were
8.1 kilograms each.(Donabedian) To use an active system would result in too much
power and mass.
Another form of active control, we considered using heaters to warm the Lunar Lander
during the lunar night. The idea is not ideal for our case due to the large amount of power
that heaters require. We did not research heaters in great depth.
A decision was made for a passive night thermal control to reduce the size of the batteries
needed on the lander. We considered a mostly active thermal control system because past
space missions include active systems. Instead of a heat pipe, we could use a cryogenic
cooler could perform the necessary task. Upon doing research several different coolers
would cool the Lunar Lander. The problems associated with the coolers included high
mass and power. For example, a NGST HEC weighs 7 kilograms by itself, additional 5
kilograms for other thermal control. The cooler requires 120 Watts to run. (Donabedian)
Our system saves over 2 kg, 120 Watts, and $30,000.
Author: Kelly Leffel
Alternative Designs – Lunar Descent
Section A-8.3.6, Page 83
Battery
The Google Lunar X-Prize consists of prizes for landing an unmanned vehicle on the
lunar surface and sending back images of the mission, bonus prizes were included onto
the X-Prize, including surviving the Lunar night. Surviving the Lunar night is a
requirement for completion of our team’s mission on the Moon. In order to survive the
night, we had to provide a method of adding heat to the Lander, so it does not freeze
during the two week of lunar night, which can reach a minimum temperature of 100
Kelvin.
The minimum temperature that would need to keep the Lander alive is 273 K or 0
Celsius. Our first method of solving this problem was using batteries to provide the
power to run heaters, keeping the Lander warm. For our analysis, we did not know the
amount of heat escaping the Lander at this point of time, so we assumed 10 Watts was
escaping the Lander. We were able to calculate the mass of battery needed to heat the
Lander using the equations listed below:
Eescape 10*14* 24*3600 12096000 J
ebattery 145
mbattery
Wh
J
*3600s 522000
kg
kg
Eescape
ebattery
12096000
23.17 kg
522000
(A-8.3.6-1)
(A-8.3.6-2)
(A-8.3.6-3)
Eescape represents the energy escaping the Lander during the two week period, ebattery
represents the energy per kilogram provided by the battery. 145 Wh/kg represents the
average energy density of Lithium ion batteries. mbattery represents the battery needed to
survive the Lunar night. The results indicate that we would need a 23 kilogram battery
just survive the Lunar night. This method costs too much in terms of mass and price to
ensure that the Lander survives the night. In the end we determined that a chemical
reaction stores more energy than a battery currently can and since we only want to
survive one lunar night, a single chemical reaction will be sufficient for completing our
Author: Adham Fakhry
Alternative Designs – Lunar Descent
Section A-8.3.6, Page 84
goals and will save us 18 kg when compared to the battery. This is discussed in sections
5.4.7, 6.4.7 and 7.4.7 for the 100 grams, 10 kilogram and large payload Landers.
Author: Adham Fakhry
Alternative Designs – Lunar Descent
Section A-8.3.6, Page 85
Chemical Energy
A requirement for our mission was to have the Lander survive the lunar night, two weeks
of constant darkness. In analysis of section 8.3.6 we decided that energy from a chemical
reaction has a higher efficiency for energy per kilogram to survive the night and saves us
18 kilograms when compared to a battery providing the energy. Two different chemical
reactions were analyzed to determine which one would be used to provide heat for the
Lander.
The concept is that the Hydrazine and Hydrogen peroxide breakdown are both
exothermic reactions by using a catalyst. Equations A-8.3.6-1 and A-8.3.6-2 show the
decomposition for both reactions.
2H 2O2 (l ) H 2O 3H 2O( g ) O2 ( g ) 108, 400 joules
3N2 H 4 4 NH 3 N 2
336, 280 joules
(A-8.3.6-4)
(A-8.3.6-5)
The energy releases is divided by the number of moles in order to get the energy
produced from dissolving one mole of both N2H4 and H2O2. In the end H2O2 releases
54200 joules per mole and N2H4 releases 112093.33 joules per mole when they
decompose. From equation 1 in section 8.3.4, we know that the Lander loses 12096000
joules. In order to determine the needed mass for each case, we have to convert joules per
mole to joules per kilogram, this is done by using the equations below:
J
1
mol 1000 g
J
*
*
*
1.593 X 106
mol 34.015 g
kg
kg
J
1
mol 1000 g
J
112093.33
*
*
*
3.498 X 106
mol 32.05 g
kg
kg
12096000 J
mH 2O2
7.59kg
1.593 X 106 J
kg
12096000 J
mN2 H 4
3.46kg
3.498 X 106 J
kg
qH 2O2 112093.33
(A-8.3.6-6)
qN 2 H 4
(A-8.3.6-7)
Author: Adham Fakhry
(A-8.3.6-8)
(A-8.3.6-9)
Alternative Designs – Lunar Descent
Section A-8.3.6, Page 86
From Eqs. A-8.3.6-5 and A-8.3.6-6, it shows that we would need double the mass of
hydrogen peroxide to provide 10 watts of heat for 2 weeks when compared to hydrazine.
There are other factors that were included when comparing the benefits of using
hydrogen peroxide and hydrazine besides their masses. Hydrazine is very toxic and
decomposes to form ammonia and hydrogen, which can ignite in presence of oxygen and
hydrazine costs 100 times more than hydrogen peroxide. Hydrogen peroxide is harder to
store and decomposes to gaseous oxygen water and oxygen, which means it has to be
purged more often on the lunar surface when compared to hydrazine. We also would
need to develop a separate containment unit for the hydrazine, so it would not mix with
the hydrogen peroxide for the propulsion system. With hydrogen peroxide, we would use
the extra fuel left over in the propellant tanks and would require no extra systems. In the
end, the cost per kilogram to the Moon, outweighed the integration and cost per kilogram
for Hydrazine and we chose Hydrazine to be the fuel used for the Thermal control on the
Lander.
Author: Adham Fakhry
Alternative Designs – Lunar Descent
Section A-8.3.7, Page 87
A-8.3.7 – Power Alternatives
Nuclear Power
Another method for powering spacecraft is using nuclear propulsion. The advantage of
nuclear propulsion is that it can provide a continuous power source for years and it is not
affected by its range from the Sun, such as solar energy, which can no longer be effective
at great distances. This is why nuclear power is preferred power source for deep space
missions. Nuclear power reactors can also provide large range of power output, from 30
to 300 kW range and they have the advantage of supplying power all the time, thus
eliminating the need for a battery in base load systems having no peak power
requirement.
The major disadvantage is that heavy radiation shielding is required around the electronic
components of the spacecraft to protect them from damage caused by the radiation. There
are nuclear fuels that are safe and easy to handle with little shielding, such as curium-244
and plutonium but they are very expensive. The other types of fuels, such as strontium-90
are inexpensive and easily available, but are unsafe.
The primary source of power in such a reactor is nuclear fission, just like that in a
ground-based nuclear power plant, only on a much smaller scale. At the core of the
reactor a fissile material, such as uranium-235 works as the heat source, this is used to
vaporize a fluid. The vapor then drives a turbine-generator using the Brayton or the
Rankine cycle. The Stirling cycle is suitable in the 50W to 50kW power range for long
life space missions, while the Brayton cycle is suitable in the 50kW to 10 MW power
range for advanced electric propulsion.
There are two methods for nuclear propulsion, Nuclear-thermoelectric and Nuclear
dynamic, one example of thermoelectric is the radioisotope thermoelectric generator,
which is being used for interplanetary missions, the other method is being developed by
NASA GRC and it has higher system efficiency, higher specific power and is capable of
Author: Adham Fakhry
Alternative Designs – Lunar Descent
Section A-8.3.7, Page 88
higher power levels when compared to the RTG system currently in use. With RTGs,
plutonium-238 would be used as the spacecrafts heat source, due to the US not having
any domestic supply it would have to be obtained from other countries such as Russia.
The plutonium is highly radioactive and would be lethal if crushed and inhaled, so it
would have to be in protective casings and it would then have to be placed into multiple
layers of graphite composite.
Tables A-8.3.7-1 and A-8.3.7-2 show the performance comparison and cost comparison
for various power systems.
Table A-8.3.7-1: Performance comparison of various power systems:
Power system
Practical power limit
Net system efficiency
Specific power
option
(kW)
(%)
(W/kg)
Solar
20
15-30
5-10
Isotope
1
7-15
7-15
Nuclear
100
7-15
2-40
Table A-8.3.7-2 Current Estimation of a cost comparison between Solar electric power and Nuclear electric power
for two power levels:
Cost Details
SEP 100 kW
NEP 100 kW
SEP 3MW
NEP 3 MW
Launching Cost
$4.9 M
$12.5 M
$147 M
$50 M
Specific Cost
$/W 800-3000
$/W 400-700
$/W 800-3000
$/W 400-700
Converter Cost
$80-300 M
$40-70 M
$2.5-9 B
$ 1.2-2.1 B
Total Cost
$85-305 M
$53-53 M
$2.6-9.1 B
$1.2-2.1 B
Author: Adham Fakhry
Alternative Designs – Lunar Descent
Section A-8.3.7, Page 89
Power – Solar Array Deployment
Two different systems were explored as options for the solar array deployment. Both the
systems became unnecessary when the solar arrays were placed on the top of the lander.
The active system would include an actuator to rotate the solar array from the stored
position to the correct orientation. Honeybee Robotics makes a solar array deployment
system that weighs less than 2.7 kilograms. This avenue was necessary when the solar
hinge was discovered.
A passive system included a solar hinge. This hinge was used on the STPSat-1 mission
with 100% success. The hinge weights 300 grams and could rotate the solar array 120
degrees.(Davis) Two hinges would be needed for each panel. The cost of the hinge
depends on the amount needed and the type of testing and quality assurance Honeybee
Robotics would need to supply.
Author: Kelly Leffel
Alternative Designs – Lunar Descent
Section A-8.3.7, Page 90
Solar Intensity
During our analysis for developing the power systems for our spacecraft, we needed to
figure out the potential power at Earth Orbit and on the Moon’s surface. In order to
accomplish this we had to determine the intensity at Earth orbit and on the Moon surface,
this was done by using the Boltzmann’s equation, Eqs. A-8.3.7-1 and A-8.3.7-2 displays
the equation used to determine the intensity.
P W
S . A. m 2
(A-8.3.7-1)
S . A. 4 r 2
(A-8.3.7-2)
I
I is the intensity in W/m2, p is the power emanating from the surface on the sphere in
Watts and S.A. is the surface area of the sphere, shown in equation A-8.3.7-2, where r is
the radius of a sphere in meters. Using these equations we were able to determine the
intensity of the Sun, which is calculated in Eq. A-8.3.7-3.
I sun
4 X 1026
W
6.58 X 107 2
2
4 (695500*1000)
m
(A-8.3.7-3)
The intensity of the Sun is found to be 6.58X107 W/m2, where 4X1026 W is the power the
Sun emits, 695500 km is the radius of the Sun. Since we know intensity decreases by a
factor of 1/r2, we are able to find the intensity at Earth’s orbit and on the Moon surface,
by using Eqs. A-8.3.7-4 and A-8.3.7-5.
2
W
r
69500
7
I Earth sun * I sun
*6.58 X 10 1420 2
. .
m
149598000
1AU
(A-8.3.7-4)
rsun
69500
W
7
I Moon
* I sun
*6.58 X 10 1414.5 2 (A-8.3.7-5)
. . Apogemoon
m
149598000 405500
1AU
2
Author: Adham Fakhry
Alternative Designs – Lunar Descent
Section A-8.3.7, Page 91
From Eqs. A-8.3.7-4 and A-8.3.7-5 the intensities for the Earth and Moon are found to be
1420 W/m2 and 1414.5 W/m2 respectively, so through the trip from the Earth to the
Moon the maximum intensity decreases only by 5 Watts, which is not a crippling factor
in our design. A.U. is an astronomical unit, which represents the mean average distance
from the Earth to the Sun, ApogeeMoon, is the farthest point from the Earth to the moon.
From our analysis, the Solar arrays placed on our space vehicles will have the maximum
potential power between 1420 and 1415 W/m2, due to how solar cells operate only 22%
of the maximum potential power is absorbed, solar cells are designed to only absorb
certain wavelengths within the visible range and reflects most other wavelength, giving it
to its low inefficiency. In the end the solar cells will have a maximum potential power of
300 W/m2 for an average Gallium-Arsenide cell.
\
Author: Adham Fakhry
Alternative Designs – Rover
Section A-8.4., Page 92
A-8.4 - Rover Alternative Designs
Introduction
There were two different designs for the Rover. The first was to have a slower moving
rover that would travel the 500 meters in 2 Earth days. This Rover had to be carefully
thermally controlled as to not overheat. The second Rover is designed to travel the 500
meters in 13 minutes and then overheat. The mass break downs, given by the Rover
design team, the different Rover designs, we can study in Table A-8.4.0-1.
Table A-8.4.0-1 Mass breakdown for the initially designed rover, 100 gram and 10 kg cases
Item
Battery
Antenna
Transmitter
CPU (computer)
Camera
Motor (4)
Mounts (8)
Gearhead (4)
Thermal Control
Magnesium
Body
Space Blanket
Wheel (4)
Power (Extra)
Payload
Total
Mass (kg)
(100 g)
0.9
0.1
0.21
0.2
1
0.092
0.176
0.03
6.98
1.06
0.99
0.58
1.92
0.1
14.34
Mass (kg)
Mass (kg)
(10 kg initial design) (10 kg “kamikaze”
design)
0.9
0.422
0.1
0.1
0.21
0.21
0.2
0.2
1
1
0.092
0.092
0.176
0.176
0.03
0.03
6.98
0
1.15
0.4
1.08
0.58
1.92
10
24.42
0.58
0.58
1.92
10
15.71
The “kamikaze” design has not been as fully developed. Most of the time the design
team spent on the Rover design was for a Rover that would move 500 meters over a two
day period. The Rover would stop and send pictures back periodically in order so that we
could designate the best path.
The Rover was not chosen for neither for the 100 gram or 10 kg case because at that point
in time other systems of travel were found to be lighter, which made the entire vehicle
system less expensive.
Author: Caitlin Mckay
Alternative Designs – Rover
Section A-8.4.3, Page 93
A-8.4.1 – CAD/Integration
A-8.4.2 – Communications
A-8.4.3 – Propulsion
First we choose a target velocity of 0.01 m/s based on a previous NASA rover mission
and what we believed to be a safe velocity for the rover. Next, we determine an optimum
wheel size and wheelbase by considering the terrain the rover must travel through and the
obstacles that may be encountered. Figure A-8.4.3-1 shows the geometry of a four
wheeled rover climbing a simple obstacle.
Figure A-8.4.3-1. Rover and obstacle geometry based on diagram by Purvis.
See section 5.5.5 for information about the average size rock at landing site determined
by mission operations. We assume that the obstacles encountered are simple steps and
that the ground clearance is equal to the radius of the wheel. Then using simple geometry
we can relate the maximum step height to the wheelbase of the vehicle as well as the
wheel radius:
𝐻𝑚𝑎𝑥 = √𝐵 2 − 𝑅 2
(A-8.4.3-1)
where Hmax is maximum height climbable, B is the wheelbase, and R is the wheel radius
(Purvis). Also, there is a minimum height for an angle approach where the vehicle may
become hung up on the obstacle:
𝐻𝑚𝑖𝑛 = 𝑅 ∗ (1 + tan 𝜃)
Author: Ryan Lehto
(A-8.4.3-2)
Alternative Designs – Rover
Section A-8.4.3, Page 94
where Hmin is the minimum height and θ is the angle of attack ( Purvis). Then the
wheelbase that can climb over the obstacle is 2√2 R and the wheel radius should be
𝐻𝑚𝑎𝑥 /√7 (Purvis). We see that the minimum wheel size for the obstacle that could be
encountered should be about 0.00756 m and the wheel base should be 0.02138 m. The
rover wheel and motor assemblies need clearance as well so we decide wheel radius of
0.042 m with a wheelbase of 0.119 m is sufficient for the mission.
To determine the torque require to turn the wheel and propel the rover use
𝜏 = (𝑎 + 𝑔𝑚 ∗ sin 𝜃) ∗ 𝑀 ∗ 𝑟
(A-8.4.3-3)
where τ is torque of the wheel, Θ angle of climb, a is rover acceleration, M is mass of
rover at each wheel, gm is Moon gravity 1.635, and r is wheel radius. A mission
requirement is the rover must have enough power to go up a 45˚ incline. The result is
with no acceleration each motor must provide a torque of 0.1923 N-m for rover with a
mass of 15.8406. Rover_motor.m determines the torque and power needed for each
motor as well as the input power require based on motor and gearing efficiency. Selecting
a motor and gear head with specifications shown in Table A-8.4.3-1 electric power
required is 0.0916 W over 13.89 days. This adds up to 76.33 W-hr for the mission.
Table A-8.4.3-2. Component Specifications and Performance
Component
Torque Output
Efficiency
N-m
Mass
Diameter x Length
g
mm
#110094-Main Drive Motor
3.63E-4
71.3%
34
19 x 28.9
# 134182-Planetary Gear Head
1
49%
81
22 x 45.8
Since the rover system requires four drive assemblies that include metal wheels that add
mass and complexity, it was deemed to be undesirable versus other systems.
Author: Ryan Lehto
Alternative Designs – Rover
Section A-8.4.5, Page 95
A-8.4.5 – Thermal Control
A-8.4.5 – Power
Tracking Solar Panels
The beginning of the project started with the brainstorming of concepts for every facet of
the design. The Design started as Xo was going to have a rechargeable battery with a set
of solar arrays on the rover to recharge the battery. To begin the sizing of solar panels the
insolation, or the solar radiation energy from the Sun on a given area had to be calculated.
The maximum expected value for this is 1360 watts/meters2 (Lean). This value is
applicable average for the Sun at any point in its eleven year cycle (Lean). Next we apply
this value to the sidereal period of the moon for a plane perpendicular to the surface at all
times. The peak of this value comes at midday as shown in Fig. A-8.4.5-1.
Power for 1 meter2 Solar Sanel During Lunar Day
450
Potenital Power (W)
400
350
300
250
200
0
2
Fig. A-8.4.5-1
4
6
8
Earth Days
10
12
solar collection peak values at Midday on the Lunar
Surface.
Author: Jeff Knowlton
Alternative Designs – Rover
Section A-8.4.5, Page 96
The purpose for having the potential for tracking was to increasing the amount of power
taken from Sun at a time of day that does not have the Sun directly overhead. The ability
to track increases the time that the rover can operate. A simple model of tracking of just
10 degrees is shown in Fig. A-8.4.5-2. The model is made of a solar panel of an area of
one m2 and a panel efficiency of 30 %.
Power for 1 meter2 Solar Sanel During Lunar Day
450
Potenital Power (W)
400
350
300
250
200
0
2
4
6
8
Earth Days
10
12
Fig. A-8.4.5-2 Peak solar power collected with 10 degrees of tracking
Comparing Fig.A-8.4.5-1 to Fig.A-8.4.5-2 shows a dramatic increase in the area under
the curve. The area under the curve represents energy that can be collected from the solar
panels. As the complexity of a tracking system grew we sought to see if eliminating
tracking all together would be a viable option.
As the design for the rover progressed the power provided by solar panels that did not
have tracking capabilities produced sufficient power. Therefore further design was not
pursued and matured. Although, we are able adjust parameters in tracking_1.m and
generate new scenarios of different tracking abilities and panel sizes.
Author: Jeff Knowlton
Alternative Designs – Rover
Section A-8.4.5, Page 97
Stationary Solar Panels
We look now at having the solar panels fixed to the top of the rover without the ability to
track the sun reducing the complexity, and in turn failure points of the rover. Doing this
would eliminate the possibility of a polar landing sight but is an option we are exploring.
The power needs for the system continue to drop excluding the drive motor needs which
were uncertain to say the least at that point, forcing us to use a over estimates for our
calculations. At the current size of the rover at the X1 design gives us a limiting size for
the solar panels being the entire upper surface of the rover. As the scenario progressed
there was a fixed sized solar panel which was reduced to a solar size of 0.09m2.
Comparing this size solar panel to the maximum amount of power that can be used we
produce Fig A-8.4.5-3
Power Collected During Lunar Day
40
35
30
Watts
25
20
15
10
5
0
Solar Power
Constant power usage
0
2
4
6
8
Earth Days
10
12
14
Fig A-8.4.5-3 Solar intake for a system that produces much more power than it needs.
The red line represents the maximum amount of power that was predicted to be used at
this point at a value of 25 watts, which is less than the maximum amount of power the
Author: Jeff Knowlton
Alternative Designs – Rover
Section A-8.4.5, Page 98
solar panels can collect at certain times. The amount of time that the solar panels can
collect a surplus of power is 172 hours in this model, the drive time estimated for the
rover to complete this mission was considerably smaller. We estimate cost of these solar
panels was roughly $40,000, which drove the need to shrink the solar panels more. This
is possible if the operation of the rover is very close to the midday for the Moon allowing
the best performance from the panels. With smaller panels the reducing the solar panels
to an area of 0.0625m2 the figure reduces to Fig. A-8.4.5-4
Power Collected During Lunar Day
30
25
Watts
20
15
10
5
Solar Power
Constant power usage
0
0
2
4
6
8
Earth Days
10
12
14
Fig A-8.4.5-4 Shows the effects of the reducing of solar array size and
the effects on drive time. The red line is the amount of continual power
use and we can only operate when the blue line is above the red line.
This reduction in size of the solar panels only allows for 72 hours of time where all the
systems can run at once, but it reduces the cost by roughly $12,000. The limiting factor
for this scenario is the amount of time required to complete the mission, as this number
falls this method of running with more than ample power and therefore the size of the
panels reduces.
Author: Jeff Knowlton
Alternative Designs – Rover
Section A-8.4.5, Page 99
In our further efforts to reduce the size and the cost of our system across the board, the
solar panels are the first to be shrunk in an effort to cut costs. Our battery is rechargeable
so the logical step is to use that to our advantage with smaller solar panels. Cutting the
panels to a level where they cannot power the rover enough to drive without aid from the
batteries. As the batteries power the rover with the solar panels the batteries lose charge
and the rover must stop to charge. This motion is the stop and go approach and removes
the restriction of operation during peak solar intake periods. Even with a small reduction
of solar cell size this dramatically increases our time of operation. At this point the panel
can be cut to a point that will allow for a similar number of hours of driving time just
spaced out for the entire lunar day instead of periods of peak insolation. As the time that
needs to be allocated to driving reduces from more accurate motor performances the size
of the solar panels reduce proportionally.
Power Collected during lunar day
30
25
Watts
20
15
10
5
0
Solar Power
Constant power usage
Usage without Motors
0
2
4
6
8
Earth Days
10
12
Fig A-8.4.5-5 The plot of a possible power scenario where the green
line show the amount of power needed to run all systems, the red line
is the power needed to run the minimum number of systems. The blue
line is the amount of power taken in by the sun.
Author: Jeff Knowlton
14
Alternative Designs – Rover
Section A-8.4.5, Page 100
The green line represents the power needed to run with all systems requiring power at
once. The red line is when the motors are turned off reducing the amount of power
needed. As we change our power usage between these two values we have enough extra
power to charge the batteries while operation at the red line, or use the solar panels and
newly recharged batteries to provide enough power to run all the systems at the green
power levels.
The current battery possibilities is shown in Table A-8.4.5-1.The various batteries have
similar weight and produce similar watt-hours, the difference is the volts which are
important as if, one of the batteries can match the correct voltage for the systems on the
rover, the need for DC-DC converters and other black box members can be removed. The
battery that is in the design is the NCP12-2 as it is closest to the voltage needed for the
motors and will require the meets amount of work to prepare for space.
Table A8.4.5-1 Rover Battery Potentials
Model
Volts
BB-2557/U
28.8
Amperehours
2.2
Mass kg
BB-2847 A/U
7.2
6.2
0.38
BB-2599/U
7.2
6.8
0.45
BB-2001A/U
10.8
4.8
0.4
NCP12-2
3.6
12
0.422
0.54
Next Step Power System
This mass of the power system could have been dramatically reduced if the system had
been developed as far as the space ball. The battery was far too large for the current
motors and was selected to power the much larger predecessors. Estimating the potential
change after the rover was pushed out of the spot light would reduce the batteries down to
10 percent of the recorded values. The housing for the battery cell would have dropped in
relation to the battery size drop The reduced amount of radiation hardening for the shorter
Author: Jeff Knowlton
Alternative Designs – Rover
Section A-8.4.5, Page 101
time scale would again reduce the housing, and the removal of additional thermal
protection would have done the same. The need for the DC-DC converters within the
black box could have been potentially removed with if a battery that produces the correct
voltage to match what the motors take in without over saturating it were used. An
estimated power budget for the rover closer to a final design appears in Fig. 8.4.5-6
Camera
1%
Reserve
25%
Battery Distribution
CPU
24%
Transmission
18%
Drive
Motors
33%
Figure 8.4.5-6 Predicted power budget based on next step
power method.
The predicted battery size produces the distribution above; if the design has matured as
far as the space ball the mass for the power system would be less than one kg, which
could have revived the rover as a potential candidate for the locomotion phase.
The largest user of power is the drive system; the CPU in this case is also much larger
because the design did not mature far enough. The change in some of the electronics
allow for the removal of the components that change the voltage to levels safe for the
electronics.
Author: Jeff Knowlton
Alternative Designs – Rover
Section A-8.4.6, Page 102
A-8.4.6 – Deployment
The deployment of the Rover is similar to the deployment of the Space Ball deployment,
section A-5.5.1, when using the linear shaped charge. Upon ignition of the shaped charge
a detonation wave propagates through the explosive core at the detonation velocity of the
explosive (Novotney, 2007). When the detonation wave reaches the copper liner, the
extreme pressure causes a collapse along the axis of symmetry. The pressure exceeds the
liner’s yield strength and causes an explosive, but straight cut through the material below.
Linear shaped charges will be made in house using the copper lining and C-4 as the
explosive material (Kane, 2009).
Copper Lining
Explosive Charge
Fig. A-8.4.6-1 Linear shaped charge cross section.
(Caitlyn McKay)
The similarities end there, unlike the Space Ball the Rover could not drop from the
bottom of the Lunar Lander to the surface undamaged. When we cut three sides of the
Lunar Lander using the charge a fourth side with a hinge will open. The Rover has a
more extensive deployment system that includes a platform in which the Rover is situated
that is lowered by a steel cable. A motor would be used, which requires energy, and the
thermally insulated box would also have a strong arm that would support the deployment
Author: Caitlin Mckay
Alternative Designs – Rover
Section A-8.4.6, Page 103
system when lowering. An example of the deployment system is seen in Figure A-8.4.62.
Motor
Support Beam
Platfor
m
Steel
Cable
Fig. A-8.4.6-2 An example of the deployment system used to lower the Rover from the
Lunar Lander to the surface of the Moon.
(Caitlyn McKay)
As we can see from the Figure A-8.4.6-2, the deployment system for the Rover is more
advance than that of the Space Ball because of the fact that it needs to be lowered. This
adds mass to the system.
The estimated mass breakdown and total mass of the
deployment can be seen in Table A-8.4.6-1.
Table A-8.4.6-1 Mass breakdown
for rover deployment.
Item
Linear shaped charge
SOLIMIDE foam
Steel cable
Platform
Motor
Support Beams
Total
Mass in kg
0.580
0.030
0.82
0.025
0.025
0.13
1.610
Footnote: The table is an estimate of masses.
Author: Caitlin Mckay
Alternative Designs – Rover
Section A-8.4.7, Page 104
A-8.4.7 – Structural Analysis
The initial, slower Rover was originally made out aluminum. Aluminum was chosen
because of its history of being the material of the Apollo Rovers. It is a relatively strong
material while minimizing weight impact. As we reduced the mass of the Rover, the
need to have strong material decreases, therefore allowing a magnesium alloy to become
an option for the structure of the Rover. Magnesium alloys, while not as strong of a
material, have a lower density than aluminum. The magnesium alloy still satisfied all of
the Rover’s stresses.
The stresses the Rover endures are caused by the forces exerted during different phases
and the mass of the systems inside. These forces cause bending moments, deformations
and buckling. Sheet buckling will occur if the support is not thick enough and the rover
cannot withstand the compression, shear or bending stresses (Grandt, 2004). The elastic
buckling stresses are determined by:
𝜎𝑐𝑟 , 𝜏𝑐𝑟 , 𝜎𝑏,𝑐𝑟
𝜋 2 𝑘𝑐 𝐸
𝑡 2
=
( )
12(1 − 𝜐 2 ) 𝑏
(A-8.4.7-1)
In order to find the new stresses Matlab code RoverBuckling.m was created. We did this
in order to reduce the work of recalculating every time the dimensions of the Rover
changed or the material changed.
For the second design of the Kamikaze Rover, we were considering Lexan material.
Since the Rover design was decided against, stress analysis was not done on the Lexan
Rover.
The design of the Rover wheel came from Ryan Lehto who researched different
possibilities, seen in Fig A-8.4.7-1. The design is an airless wheel commonly referred to
as a twheel developed by Michelin. The special hub and spoke design replace the need
for air. The tweel’s “hubcaps” have the ability to absorb shocks. The wheel is made
from aluminum with chevrons added for traction and is filled with SOLIMIDE foam to
Author: Caitlin Mckay
Alternative Designs – Rover
Section A-8.4.7, Page 105
keep dust and rocks out. SOLIMIDE foam was originally used in the NASA space
shuttle program and has the following properties (Evonik, 2009):
Fire-resistant, meeting all the flammability requirements of FAR 25.856 (a)
Lightweight with a density of 5.45 kg/m3
No smoke or toxic gas emission
Wide operating temperature range of -190° C to 300° C
Excellent thermal and acoustical insulation properties.
Fig. A-8.4.71-1 Schematic of rover wheel
(Ryan Lehto)
The wheels of the Rover were sized to increase the probability of a successful mission
while maintaining a low mass. The size of the particles or rocks the Rover would have to
face was taken from the Apollo 12 Preliminary Science Report (Calio, 1970). The report
included a cumulative size-frequency distribution of surface particles from the Apollo 12
and 11 and Surveyor 3 sites. Figure A-8.4.7-2 we see the Apollo 12, the site used in this
case, observed particle count taken from the report.
Author: Caitlin Mckay
Alternative Designs – Rover
Section A-8.4.7, Page 106
Cumulative number of particles per
100 m^2
10000000
0.0001
1000000
100000
10000
1000
100
10
1
0.001
0.01
Particle Size (meters)
0.1
1
Fig. A-8.4.7-2: Cumulative size-frequency distribution of observed surface
particle counts at the Apollo 12 site.
(Caitlyn McKay)
Rocks the Rover would have to drive over were considered to be steps that needed to be
climbed. The maximum step size the wheel of the Rover could manage was found using
the equation below (Pletta, 1993):
𝐻𝑚𝑎𝑥 = √7𝑅
(A-8.4.7-2)
where Hmax is the maximum step height the wheel is able to climb and R is the radius of
the wheel, dimensions must be the same. The optimum size for the base of the Rover is
also found by the radius of the wheel:
𝐵 = 2√2𝑅
(A-8.4.7-3)
where B is the size of the base and R is the radius of the wheel, dimensions must be the
same. The optimum base size allows the Rover to drive up a 45 degree angle.
We see in Fig A-8.4.7-1 that the wheel spokes take the force of the Rover. The force
allowable on a spoke is determined by the angle and dimensions of the spoke, and the
Author: Caitlin Mckay
Alternative Designs – Rover
Section A-8.4.7, Page 107
angle of the force as we see in the following the next few steps (Gonzalez, 2004). The
first step is to find the maximum displacement for a spoke:
𝛿𝑚𝑎𝑥 = 2𝑙0 − 2𝑅0 sin 𝜃𝑙0
(A-8.4.7-4)
where l0 equals the total beam length, R0 the radius of the wheel, and θl0 the angle of the
wheel.
The total beam length is found by:
𝜃𝑙0
360°
where R is the radius of the wheel, and θl0 the angle of the wheel.
𝑙0 = 2𝑅𝜋
(A-8.4.7-5)
The moment of inertia we find using the equation below (Gere, 2003):
2𝛽 + sin 2𝛽 1 − cos 2𝛽
𝐼 = 𝑟 3𝑡 (
−
)
2
𝛽
(A-8.4.7-6)
where 𝛽 is the constant 𝜋⁄2, t the thickness, and r the radius of the wheel.
The three equations above combine to find the force the spoke is able to withstand:
𝑃=
𝐸𝐼𝛿𝑚𝑎𝑥
𝑅03
(A-8.4.7-7)
Matlab code Wheel_Force.m calculates the amount of force a single spoke is able to
withstand. The code is used to optimize the thickness in order to reduce the mass of the
Rover while able to easily change the input parameters.
We also had to look at the stress that would be placed on the Rover’s motor shaft. The
force that would be placed on the shaft is found by:
Author: Caitlin Mckay
Alternative Designs – Rover
Section A-8.4.7, Page 108
𝐹=
𝑚𝑔
𝐴
(A-8.4.7-8)
where F is the force exerted, m is the mass of the Rover’s body, g is the gravitational
force, and A is the contact area.
The gravitational force changes from when the Rover is on Earth, to launch, landing, and
then while on the Moon. The mass exerted on each shaft is also divided by the number of
shafts using the assumption that the weight is evenly distributed. The contact area we
find by via:
2
𝐷⁄
𝑠𝑎𝑓𝑒𝑡𝑦 𝑓𝑎𝑐𝑡𝑜𝑟
𝐴=(
) 𝜋
2
(A-8.4.7-9)
where D is the diameter of the shaft and the safety factor used was 2.
If half of the yield strength of the aluminum shaft is less than the shear stress, the shaft
would not be strong enough. The shear stress from torque we find using:
𝜏=
𝑇𝜌
𝐽
(A-8.4.7-10)
where T is the twisting torque, 𝜌 the radial distance, and J the polar moment of inertia.
The polar moment of inertia we find with:
𝐽=
𝜋𝑑 4
32
where d is the diameter of the gear shaft.
Author: Caitlin Mckay
(A-8.4.7-11)
Alternative Designs – Rover
Section A-8.4.7, Page 109
If the Rover, during any of the four different gravitational forces exerted on it, did not
withstand the force, the Rover would need additional support. Matlab code GearShaft.m
shows us the different masses the Rover would have to be before failure. Table A-8.4.7-1
and Figures A-8.4.7-3 through A-8.4.7-6 show the possible mass sizes before failure for a
Rover in the mass ranges of 5 to 20 kg with a shaft diameter of 0.003 m.
Table A-8.4.7-1 The different amount of mass
gear shaft able to withstand.
Gravitational Force
Moon (1/6 g’s)
Earth (1 g)
Launch (8.5 g’s)
Landing (10 g’s)
Mass gear shaft is
able to withstand (kg)
736.50
122.75
16.37
12.28
Fig. A-8.4.7-3 Mass that gear shaft of 0.003 m is able to
withstand on the Moon.
(Caitlyn McKay)
Author: Caitlin Mckay
Alternative Designs – Rover
Section A-8.4.7, Page 110
Fig. A-8.4.7-4 Mass that gear shaft of 0.003 m is able
to withstand on the Earth.
(Caitlyn McKay)
Fig. A-8.4.7-5 Mass that gear shaft of 0.003 m is able
to withstand during launch of 8.5 g’s.
(Caitlyn McKay)
Author: Caitlin Mckay
Alternative Designs – Rover
Section A-8.4.7, Page 111
Fig. A-8.4.7-6 Mass that gear shaft of 0.003 m is able to
withstand during landing of 10 g’s.
(Caitlyn McKay)
From the table and graphs we can see that the Rover needs additional support for landing.
The Kamikaze Rover would be able to withstand the launch and there are not any
concerns for roving on the Earth or Moon.
Author: Caitlin Mckay
Alternative Designs – Other Locomotion
Section A-8.5.1, Page 112
A-8.5 – Other Locomotive Alternatives
A-8.5.1 – Sled Alternative
The following describes the process for sizing the electric track size necessary for a
tracked vehicle. The net force provided by a tracked vehicle is simply the track force
minus the resistance of the track minus the internal resistance of the track system
𝐹𝑛𝑒𝑡 = 𝐹𝑇 − 𝑅𝑇 − 𝑅𝑖𝑛
(A-8.5.1 -1)
where Fnet is the net force, FT is the track force, RT is the track resistance, and Rin is the
internal resistance ( Wong).
We see the force of the tracks and resistance of the tracks respectively is
𝑙𝑡
𝐹𝑇 = 2𝑏 ∫0 𝜏 cos(𝛼)𝑑𝑙
𝑙𝑡
𝑅𝑇 = 2𝑏 ∫0 𝑝 sin(𝛼)𝑑𝑙
(A-8.5.1-2)
(A-8.5.1-3)
where b is width of track, τ is soil shear stress, α is the angle of the track element in
respect to the soil surface, and p is the pressure exerted on the surface.( Wong).
To compute the soil shear stress τ we use
𝜏 = 𝑐 + 𝑤 tan(𝜑)
(A-8.5.1-4)
Where c is the cohesion of the terrain ~3.9 kPA, w is the weight of the element, and φ is
the internal shearing resistance of the terrain 56˚ ( Klosky).
As a simplification, we assume the tracks are ridged and in contact with the terrain at all
times thus horizontal angle of attack of the track is zero. We use historical data from
tracked vehicles to determine the internal resistance of 0.025 N. We need the track
vehicle to climb a 45˚ slope. We determine that the area of the track needs to be about
0.336 m2. The preliminary analysis told us that the sled track system was not the best
option.
Author: Ryan Lehto
Alternative Designs – Other Locomotion
Section A-8.5.1, Page 113
A-8.5.2 — Spring Launch Alternative
Table A-8.5.2-1 100 gram payload case potential Space Ball (7.6 grams)
Number of
Springs
1
10
20
30
40
50
60
70
80
90
100
Distance (m)
Launch g’s
Landing g’s
18.03
180.29
360.59
540.88
721.17
901.46
1081.76
1262.05
1442.34
1622.63
1802.93
118.30
1183.02
2366.04
3549.07
4732.09
5915.11
7098.13
8281.15
9464.18
10647.20
11830.22
4.75
15.01
21.23
26.00
30.02
33.57
36.77
39.72
42.46
45.04
47.47
Spring Length for 30 g
Launch (m)
0.60
6.01
12.02
18.03
24.04
30.05
36.06
42.07
48.08
54.09
60.10
Table A-8.5.2-2 10 kilogram payload case potential Space Ball (18.5 grams)
Number of
Springs
1
10
20
30
40
50
60
70
80
90
100
Distance (m)
7.41
74.07
148.13
222.20
296.26
370.33
444.40
518.46
592.53
666.60
740.66
Launch g’s
Landing g’s
48.60
486.00
972.00
1457.99
1943.99
2429.99
2915.99
3401.99
3887.99
4373.98
4859.98
3.04
9.62
13.61
16.67
19.24
21.52
23.57
25.46
27.22
28.87
30.43
1
𝐸𝑃𝑜𝑡𝑒𝑛𝑡𝑖𝑎𝑙 = ∗ 𝑘𝑠𝑝𝑟𝑖𝑛𝑔 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡 ∗ 𝑥 2
2
𝐸𝐾𝑖𝑛𝑒𝑡𝑖𝑐 = 𝐸𝑃𝑜𝑡𝑒𝑛𝑡𝑖𝑎𝑙
1
𝐸𝐾𝑖𝑛𝑒𝑡𝑖𝑐 = 2 ∗ 𝑚 ∗ 𝑣 2
𝑉𝑦,𝑓𝑖𝑛𝑎𝑙 = 𝑣 ∗ sin 45°
Author: Zarinah Blockton
Spring Length for 30 g
Launch (m)
0.25
2.47
4.94
7.41
9.88
12.34
14.81
17.28
19.75
22.22
24.69
(A-8.5.2-1)
(A-8.5.2-2)
(A-8.5.2-3)
(A-8.5.2-4)
Alternative Designs – Other Locomotion
𝑉𝑦,𝑓𝑖𝑛𝑎𝑙 = 𝑉𝑦,𝑖𝑛𝑖𝑡𝑎𝑙 − 𝑔𝑚𝑜𝑜𝑛 ∗ 𝑡
𝑉𝑥 = 𝑣 ∗ cos 45°
𝛥𝑥 = 𝑉𝑥 ∗ 𝑡
Author: Zarinah Blockton
Section A-8.5.1, Page 114
(A-8.5.2-5)
(A-8.5.2-6)
(A-8.5.2-7)