Forecasts of PV Power Output Using Measurements of PV Output of
advertisement

Forecasts of PV Power Output Using Measurements of PV Output of 100
Residential PV Installs
Vincent P. A. Lonij1, Vijai Thottathil Jayadevan2, Adria E. Brooks1, Kevin Koch3, Mike Leuthold4,
and Alexander D. Cronin1
1
University of Arizona, Physics, Tucson, AZ 85721
University of Arizona, ECE, Tucson, AZ 85721
3
Technicians For Sustainability, Tucson, AZ 85705
4
University of Arizona, Atmospheric Sciences, Tucson, AZ 85721
2
ABSTRACT
We report results of a new method to forecast variability in PV
power output due to clouds using measurements from 100
residential rooftop PV systems. We will compare the
performance of this method to results from a numerical
weather model, and forecasts based on images from an all-sky
camera. Our numerical weather model provides forecasts of
irradiance up to several days in advance. Our network of PV
systems can forecast output up to an hour in advance. Our
images from an all-sky camera, and associated image analysis
can be used to forecast 10 minutes in advance. We will show
how using results from a numerical weather model as an input
to the other forecasts improves accuracy of 45-minute ahead
forecasts. We present animated (video) data for each of
forecasting method.
INTRODUCTION
Solar power utilization at the utility-scale is a Grand
Challenge. A major problem is the intermittent output of
solar power plants due to passing clouds and nighttime.
Intermittency limits the adoption solar power by utility
companies and industry because they require reliable power.
Intermittency can be mitigated with energy storage,
spinning reserves, or demand response. However, optimal
management of these three methods requires accurate
forecasts of PV power output on several timescales.
Forecasting at all timescales is valuable for utility operators
and plant owners. Day-ahead forecasts are needed to better
determine pricing in the energy market. Hour-ahead and
shorter time-scale forecast are valuable for electric grid
operators to schedule spinning reserves.
Several methods exist to forecast PV power output [1,2]
including
1.
2.
3.
Numerical weather models,
Measurements of PV power from a regional
network of PV systems,
Block motion analysis of ground based camera
images.
We will discuss the advantages and drawbacks of each of
these methods and we will show that combining these
methods can improve the accuracy of our forecasts. In
particular, using predicted wind speeds from a numerical
weather model, or using cloud velocity measurements from
an all-sky camera improve the forecasts that use
measurements of a network of PV systems.
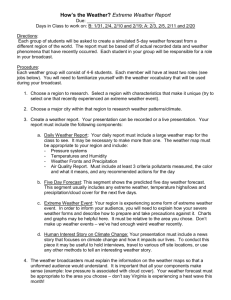
Figure 1: a) 30 hour ahead forecast of GHI in the Arizona region, b) DNI forecast, c) Satellite image
of the same region. Movie available at [3].
southeast to the northwest of the Tucson valley over the
course of 1 hour.
NUMERICAL WEATHER MODEL
Numerical weather models can forecast up to several days in
advance. Figure 1 shows forecasts of DNI and GHI based on
our implementation of the WRF (Weather Research and
Forecasting) numerical atmospheric model made 30 hours in
advance. While Figure 1 shows excellent agreement with
satellite images, forecasting the exact timing of cloud events
is still challenging (see Figure 2). This implementation of
the WRF utilizes a 448-node Beowolf cluster and requires 2
hours of computation to provide forecasts every 2 minutes
on a 1.8KM gird across Arizona up to 50 hours in advance.
Figure 2: One-day ahead forecasts of Plane of array
irradiance in a single location compared to
measurements of PV power output. [WILL REMAKE
FIGURE WITH HI-RES WRF RESULTS]
Figure 2 shows that the WRF model is able to predict largescale cirrus clouds, as well as days that are entirely cloudy,
but has difficulty with smaller scale clouds on partially
cloudy days. This demonstrates the need for alternative
forecasting methods.
Techniques that apply velocimetry to satellite images are
able to forecast intermittency due to clouds on time scales
ranging from 1 hour to 6 hours. For timescales less than one
hour forecasts based on persistence outperform satellitebased forecasting methods. [1]
Next, we will discuss a new method create intra-hour
forecast PV power intermittency due to clouds using
measurements from a distributed network of ground-based
PV systems.
MEASUREMENTS OF PV POWER FROM
REGIONAL NETWORK OF PV SYSTEMS.
A
We used measurements of PV power output from 100
residential rooftop systems distributed over a 100km x
100km area to forecast PV power output. Measurements are
taken at 15-minute intervals (15 min. averages). Figure 3
shows final yield for 83 systems in the Tucson area plotted
on a map for three different times. The dark points
(indicating low output, due to a cloud) shift from the
Figure 3: Measurements of PV power output from 83
systems at three different times, over the course of 1
hour. The dark points (indicating low output) indicate a
cloud moving from the southeast of the Tucson valley to
the northwest. A ground-based wind measurement
indicates winds to the southwest. The two black
horizontal lines indicate two major streets in Tucson,
one mile apart. A movie of this data is available at [4].
For this figure, the location of each of the systems has
been offset by one mile in a random direction to preserve
the anonymity of the system owners.
The ground sensor network presented here offers better
spatial and temporal resolution than the GOES satellite
images. An additional advantage of this method is that PV
power output can be directly inferred from the output of
other PV systems. That is, we do not need to know about the
density, spectral properties or reflectivity of clouds, as we
do in the other methods discussed in this paper. This leads
to smaller errors in the forecasts of cloud cover opacity and
POA irradiance.
The data presented here is obtained using only existing
infrastructure. Each of the PV systems used in this study use
a SMA inverter with a data communications card installed
to record data. This data is transmitted over the Internet
using an SMA “Sunny Web-Box”.
Although the results we present here are based on historical
measurements, no additional hardware is needed to make
real time forecasts. Changing the operation of the hardware
to provide real-time measurements of power output at 5 min.
intervals can be done with a change to the software.
Once data is collected on a central server, PV output for
each system can be forecast as follows. First we obtain a
clear-sky expectation for the output of a system as described
in [XXX]. Subsequently, We also correct for shading,
outages and system orientation [XXX]. We then identify
deviations from the clear-sky operation of the system due to
clouds. We define the clear sky index as
𝐾≡
𝑃𝑂𝐴(𝑡)
𝑃𝑂𝐴𝐶𝑙𝑒𝑎𝑟 (𝑡)
where POA(t) indicates the Plane Of Array irradiance at
time t and and POAClear(t) indicates the POA irradiance in
the absence of clouds.
where vx and vy are the x and y components of the cloud
velocity vector respectively.
Values of K at locations between the points where PV
systems are located are determined by interpolation as
follows. For a location (x,y) we determine K for the four
closest PV systems {Ki}, we then take K(x,y) =
median({Ki})
The main challenge now is to determine the wind velocity at
the altitude of the clouds. Ground based measurements of
wind (also indicated in figure 3) are not an accurate measure
of the velocity of clouds.
We examine three different ways of estimating cloud
velocity:
1. we use wind velocity from a numerical weather
model,
2. We infer cloud velocity from ground based
irradiance measurements as well by finding the
closest solution to
𝑦𝑓 (𝑥, 𝑦, 𝑡) = 𝑦(x − vx ∗ dt, y − vy ∗ dt, t − dt)
(2)
3.
for vx and vy based on measurements of y for all
systems.
For selected days we use a constant cloud velocity
throughout the day, that was optimized
(retrospectively) to give the best forecast for that
day.
Table 1 shows RMS error using these three different cloud
velocity estimates for time horizons ranging from 15
minutes to 75 minutes. Table 2 shows mean bias error
(MBE) defined as Mean(yforecast-ymeasured). We show results
for the period Aug1 through Oct 31. This period has a
clearness index of 80%.
Both tables also list results from the persistence model. The
persistence model assumes that the clear sky index at a
future time t = t0 + dt is the same as the cloud index at t0.
For time horizons larger than 30 minutes our forecast outperforms the persistence model.
The output of any system is then given by
𝑦𝑓 (𝑥, 𝑦, 𝑡) = 𝑦𝑓−𝑐𝑙𝑒𝑎𝑟 𝐾
where yf(t) is the yield (kW/kWpeak) at time t.
Once K has been determined for every system, we can
forecast K at time t+dt, at location (x,y) from K at time t and
location (x’,y’) = (x-vx*dt,y-vy*dt) using
𝐾(𝑥, 𝑦, 𝑡 + 𝑑𝑡) = 𝐾(x − vx ∗ dt, y − vy ∗ dt, t)
(1)
On days that are entirely clear the output of a PV system is
very predictable; the cloud index is always 0, and therefore
the persistence model performs as well as our forecast.
Similarly, on days that are entirely overcast, when the cloud
index is constant close to 0.8, the persistence model also
performs as well as our forecast. It is on days when the sky
is partially or intermittently cloudy that PV power output is
hard to forecast, and our algorithm outperforms the
persistence model.
Table 1: RMS Errors for different cloud velocity
estimates at different forecasting horizons for the period
Aug 1 through Oct 31 2011.
frame to the center). Similar to [2] we used block-motion
estimation to estimate the velocity of clouds in different
parts of the image (see Fig 5) [6].
RMS
Error/Avg
yield
15 min
30 min
45 min
60 min
75 min
Clearness
Index
We use a wide-angle camera mounted on a dual axis
equatorial tracker that follows the sun throughout the day.
Using a block-motion estimation algorithm we determine
the velocity of clouds in the image (in pixels/second).
Using our knowledge of the orientation of the camera, we
can convert the velocity of pixels in the image to estimates
of cloud velocity in real-world coordinates (in
meters/second), see figure XXX.
Vc from
WRF
Vc from
Grnd.
Sens.
Vc
optimized
Persistence
0.38
0.37
0.25
0.42
80%
Table 2: Mean Bias error for different cloud velocity
estimates at different forecasting horizons for the period
Aug 1 through Oct 31 2011.
MBE/Avg
yield
Vc from
WRF
Vc from
Grnd.
Sens.
Vc
optimized
Persistence
15 min
30 min
45 min
60 min
75 min
0.006
0.005
0.005
0.004
If we assume cloud velocity to be constant, we can forecast
cloud position up to 10 minutes into the future. These
forecasts can predict cloud arrival times with an accuracy of
a few minutes. (see Figure 6).
Figure 4 shows the result of a forecast for one day in August
of 2011 [TODO!!!], using each of the three cloud velocity
estimates. The best result is obtained using method 3. For
the data in figure 4, method three has an RMS error that is
40% smaller than methods 1 and 2. This suggests that better
cloud velocity measurements or forecast are needed.
Figure 4: Forecasts of PV performance based on
measurements of a network of 83 PV systems.
BLOCK MOTION ANALYSIS OF GROUND BASED
CAMERA IMAGES.
Ground-based cloud imaging can be used to forecast
intermittency due to clouds about 10 minutes in advance
(the time it takes for a cloud to move from the edge of the
Figure 5: Image taken with a camera mounted on a dual
axis tracker pointed at the sun. Red arrows indicate
motion vectors obtained from block motion estimation
analysis. Movie available at [4].
The three different forecasting methods we presented here
have complementary characteristics. For example, the WRF
model is better at forecasting cirrus clouds at forecast
horizons of up to 50 hours, but has difficulty forecasting
cumulus clouds with temporal resolution better than one
hour. Our forecasting method using measurements from a
network of distributed PV systems on the other hand has
difficulty with slowly varying cirrus clouds but is able to
provide intra-hour forecast of quickly varying cumulus
clouds. This suggest a potential for hybrid forecasting
systems that use input from distributed PV systems into
WRF models and vice versa.
Figure 6: Forecasts of cloud arrival time based on blockmotion estimation. Cloud arrival times can be predicted
with an accuracy of a few minutes.
In future work we will also incorporate these measurements
of cloud velocity into the forecasting method that uses a
network of distributed PV systems described in section
XXX.
CONCLUSION
We presented results of a forecasting method that uses
measurements from a network of residential PV systems.
We compared results of this new forecasting technique to
results of a WRF numerical weather model as well as
forecasts using images from a ground based camera.
Forecasts using 15-minute interval measurements from a
network of distributed PV systems outperform the
persistence model for forecast horizons larger than 30
minutes.
We observed that the main source of error in a forecast is an
error in the estimation of the cloud velocity. Determining
cloud velocity from measured PV data is challenging for our
data set because the geographical area spanned by our
dataset is small relative to the time resolution of our
measurements. Using wind velocities obtained from
numerical weather models gives improved results, however,
because cloud edge velocity is not always the same as wind
velocity, there is still significant error.
In future work we will therefore explore other techniques to
determine cloud velocity, including image analysis of cloud
images from satellites and from a ground based camera.
Using a ground based sun tracking camera we can also
make forecasts with a temporal resolution of about 1 min,
however, these techniques are already affected by nonlinear
cloud motion over the course of 5 to 10 minutes.
REFERNCES
[1] “Validation of short and medium term operational solar
radiation forecasts in the US” Richard Perez, Sergey
Kivalov, James Schlemmer, Karl Hemker Jr., David Renne,
Thomas E. Hoff, Solar Energy 84, 2010, 2161–2172
[2] “Intra-hour forecasting with a total sky imager at the UC
San Diego solar energy testbed“, Chi Wai Chow, Bryan
Urquhart, Matthew Lave, Anthony Dominguez, Jan Kleissl,
Janet Shields, Byron Washom, Solar Energy 85, 2011,
2881–2893
[3] http://www.atmo.arizona.edu/?section=weather&id=wrf
[4] http://www.uapv.org/
[5] “Performance Reviews from the Tucson Electric Power
Solar Test Yard”, Alexander D. Cronin, Vincent P.A. Lonij,
Garrett Hardesty, and Adria Brooks, IEEE Photovoltaic
Specialist Conference, 2011.
[6] “Looking to the sky to predict PV output” , Vijai
Thottathil Jayadevan, Alexander Cronin, Sarah Jones,
Vincent Lonij, American Physical Society 4-corners
meeting, 2011.