The Physics Behind a Bicycle
advertisement

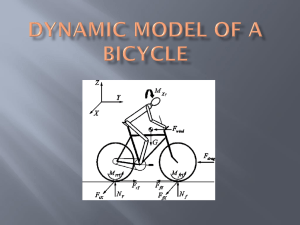
1 Jeffrey Kane WRIT 340 November 1, 2011 The Mysterious Physics of a Bicycle’s Balance In 1817, the first bicycle appeared in Germany. [1] It was named the Laufmaschine, meaning the running machine. The inventor, Karl von Drais, designed this device out of a need for a replacement to the horse. Crop failures caused horses to starve to death, making the number of available work horses dwindle. This bicycle was constructed of wood, weighed 48 lbs, and did not have pedals. The rider sat atop the bicycle and for locomotion, ran on the surface and glided while seated. The Laufmaschine is pictured in Figure 1: Laufmaschine Bicycle Figure 1. [2] A hand crank was added in 1821, but it did not become popular because it was difficult to use. Foot pedals were added in 1863, and became the design of the bicycle we know today. [1] Most modern bicycles require balance on two inline wheels. This balancing act was thought to be a result of the gyroscopic effect and steering trail, yet was disproved by an experimental bicycle with negated gyroscopic effects and no steering trail. The bicycle remains the most efficient means of transportation powered by human energy and is heavily used throughout the world. Although it has become popular and widely used, the laws governing its balance still remain a mystery. 2 The Physics Behind a Bicycle Early Accepted Understanding The early accepted understanding of how a bicycle balanced was based on the gyroscopic effect of a rotating mass, where a moment about one axis induces a moment about the perpendicular axis, along with the steering trail on the front wheel. [4] The trail is the difference in distance between where the steering axis intersects the ground and where the contact patch on the front wheel is on the ground, as depicted in Figure 2. The gyroscopic effect on the wheels of a bicycle caused it to resist external forces. As the wheel rotated, angular momentum, which is the product of the moment of Figure 2: Front Trail of Bicycle inertia and angular velocity, was conserved for the system. [5] When the gyro was turned along any other axis with an external twisting force, it forced another twisting force along the perpendicular axis, causing the wheel to tilt, yet still resisted and wanted to return to its original orientation. This was seen on a bicycle when a rider leaned to one side before entering a turn. As the rider leaned, the wheel had torques with a tendency to make the wheel turn in the direction of the lean. The steering trail on the front wheel also helped for self-steering a bicycle. The first velocipede had a trail of 6 inches, much larger than the trails of race bicycles today. This trail acted similarly to the self-centering caster seen on grocery carts. As the rider leaned into a turn, the wheel steered into the direction of the lean and with the bicycle’s inertia, had an increasing angular acceleration (unless brakes are applied), returned to the vertical orientation, and then began leaning in the opposite direction. (Include animation of this) 3 The behavior of a bicycle was believed to be influenced by the position of a rider and his or her center of mass and steering input on the handlebars. When a rider leaned over one side of the bicycle, the center of mass was not located over the contact point of the wheels to the ground. To keep the system stable, the bicycle needed to be positioned such that the center of mass was located over the contact point. What scientists realized was that a bicycle was able to return to stability if it was already in motion. [3] A bicycle at low speeds was more difficult to balance than the same bicycle at higher speeds. At higher speeds, the dynamic system of the rider and bicycle had a larger momentum1, and greater inertia2. It had a greater tendency to keep moving forward, and when leaning, the wheels did not need to turn as much to keep stable when compared to leaning in at the same angle at lower speeds. What Shook This Long Held Belief? For years, the gyroscopic effect and steering trail stood as the common belief for the basis of how a bicycle operated. It was disproved by researchers at the Delft University of Technology in the Netherlands this year, where they built a bicycle with negated gyroscopic forces and minimal steering trail. [6] This experimental Figure 3: Experimental Bicycle cycle, pictured in Figure 3, had counter-rotating masses, canceling out any gyroscopic effect. The counter-rotating masses were placed on top of the wheels, and 1 Momentum: the quantified product of the mass and velocity, in many physical problems this quantity is conserved unless there are losses due to external forces within a system 2 Inertia: the resistance of changes in motion 4 had a belt wrapped around them that came into contact with the lower wheels, causing them to rotate but in the opposite direction. The steering axis was placed behind the point where the wheel was in contact with the floor, such that it had a slightly negative steering trail. What they found was that this bicycle was still able to balance and it behaved similarly to the regular bicycle. (Embed video demonstrating how this bicycle is still able to balance) Without trail, the bicycle was still self-steering in that it would turn the front wheels in the direction of a lean. This caused scientists to realize that these forces were not required for stability, although they did enhance it. This same experiment tested the location of the center of mass on the longitudinal frame of the bike, finding that if the center of mass was located closer to the front than back wheel the steering was more responsive. Locating the center of mass in front of the front wheel, similar to the posture a triathlon cyclist sits in, made the steering very responsive, but the bicycle overall was less stable. What Can We Conclude is Responsible? Inertia and momentum help a bicycle remain stable when initially starting from a stable point. Newton’s second law of motion dictates that every object in a state of uniform motion tends to remain in that state of motion unless an external force is applied to it. [5] Once you propel yourself forward and maintain that with force applied to the pedals, you will stay upright and continue moving with a forward velocity unless slowed down by applying a braking force to the wheels, or from being hit by another object. The self-steering lean observed in the experiments also shows that forces need to be balanced. When the bicycle is upright in the vertical orientation, the only forces acting on it are its weight under the influence of gravity downwards, and a resulting force upwards where the tire makes contact with the ground, as can Figure 4: Force Balance Vertical Orientation 5 be seen on the force balance diagram in Figure 4. When the bicycle is leaning, the center of gravity is over the side and lateral forces come into play, as can be seen in the force balance diagram in Figure 5. There is a force of static friction keeping the tire from sliding out under the rider, and there is a complementary centrifugal force pushing the rider to the outside of the turn. [5] This centrifugal force is a function of both velocity and radius of the turn. The centrifugal force is the force pushing the mass to the outside of the turn. Its opposite, the centripetal force, is the force pushing the mass to the inside of the turn. In motorcycle racing, riders drastically lean into turns, nearly rubbing their knees against the surface to make the tightest turn and maintain the most speed, as pictured in Figure 6. [7] Figure 5: Force Balance When Leaning If managing a turn at the same speed, and one rider leans in more, the radius is less than if the rider were to lean in to a lesser degree. If managing a turn at the same degree of lean, the rider with a higher speed makes a larger turn radius than if the rider were to Figure 6: Lean during Turn have a lower speed. (Include an animation of this, showing the different scenarios) As the bicycle is in the turn, it is accelerating and its velocity reaches a point where the centrifugal acceleration is greater than the centripetal acceleration, self-correcting the lean and returning the bicycle to the vertical orientation, where it then leans in the opposite direction unless stabilized by the rider. 6 Bicycles in the Modern Day The bicycle is still the most efficient mode of human powered transportation. The layout has gone unchanged for nearly two centuries: the rider sits between two wheels where the center of mass is located, steering from the front wheel. Bicycle manufacturers do not focus on stability in their design, as that factor is influenced more by the rider than bicycle geometries. There is no set equation to determine the stability of a certain design, and trial and error experimentation is still the main form of prototype testing. Certain bicycle geometries, though, do enhance comfort, as well as ease of riding. The introduction of the recumbent bicycle in which the rider is in a laidback reclining position increases power efficiency by allowing the rider to input a greater force on the pedals, allowing them to accelerate faster as well as sit more comfortably on the cycle. In urban cities, bicycles are a popular mode of transportation due to its low cost. Manufacturers aim to increase bicycle safety to better protect riders with an exoskeleton frame, as seen in the design sketches of a concept bicycle in Figure 7. [8] Bicycles are normally naked frame, leaving the rider exposed. The National Highway Traffic Safety Administration found that in 2009, there were 51,000 cycling related injuries. Increasing bicycle safety by adding a rigid structure to protect riders can increase the Figure 7: ThisWay Concept Bicycle amount of automobile drivers switching to using bicycles to commute in order to save money as well as reduce their carbon footprint. To make bicycles more efficient as modes of transportation, manufacturers aim to make them lighter, stiffer, and more aerodynamic. Exotic materials such as carbon fiber, fiberglass, and 7 other composites have been used in bicycle construction as they are lighter and stiffer in comparison to their metallic counterparts, but they carry a higher cost to manufacture. Aerodynamics have pushed the envelope for time trial and triathlon cyclists by allowing them to reach higher speeds with less aerodynamic drag and higher stabilities by reducing wobbles from strong cross winds. With these refinements, it becomes even easier to stay balanced on a bicycle. 8 Works Cited [1] J. H. Lienhard, "Myths and Milestones in Bicycle Evolution," University of Houston, 2011. [Online]. Available: http://www.jimlangley.net/ride/bicyclehistorywh.html#tline. [Accessed 4 10 2011]. [2] G. Power, Laufmaschine (around 1820), Heidelberg, 2008. [3] D. E. H. Jones, "The Stability of The Bicycle," American Institute of Physics, vol. 23, no. (4), pp. 34-40, 1970. [4] T. Foale, "WaybackMachine," 20 July 2006. [Online]. Available: http://www.ctv.es/USERS/softtech/motos/Articles/Balance/BALANCE.htm. [Accessed 5 10 2011]. [5] F. P. Beer, E. R. Johnston and P. J. Cornwell, Vector Mechanics For Engineers: Dynamics, New York: McGraw-Hill, 2010. [6] J. D. G. Kooijman, J. P. Meijaard, J. M. Papadopoulous, A. Ruina and A. L. Schwab, "A bicycle can be self-stable without gyroscopic or caster effects," Science Magazine, vol. 332, no. 6027, pp. 339-342, 2011. [7] D. Mojado, Turn 7: The chase pack, Infineon Raceway, AMA Superbike Challenge 2004, Sonoma: Refracted Moments, 2004. [8] ThisWay by Torkel Dohmers, Torkel Dohmers.