gwat12234-sup-0002-AppendixS2
advertisement

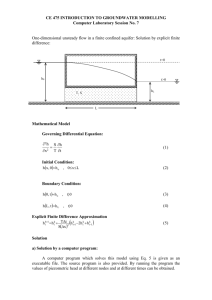
Appendix S2. Operational problem: Hybrid LP-LP model The optimization problem defined by the objective function of Equation 11 subject to the constraints of 2 to 7 is clearly the same problem as that defined by Equations 1 to 7 assuming that all the n wells are to be operated ( wk =1 ; k=1,…,n). To avoid unnecessary notations, therefore, we consider the solution of the problem defined by Equations 1 to 7 instead. This problem is a continuous nonlinear optimization problem which can be effectively solved by NLP methods. Solution of this problem by NLP methods, however, requires high computational effort due to the complexity of the constraint 5 irrespective of the method, embedding or simulation-optimization, used to enforce the constraint. Recently, a novel hybrid LP-LP model was developed by the authors for the solution of the groundwater operational problem defined by Equations 1 to 7 with higher efficiency compared to available methods including NLP methods. In this method, the differential equation governing the water level drawdown in the aquifer is first discretized using the Finite Difference Method (FDM) and embedded in the problem formulation as a set of additional constraints. The resulting highly constrained non-linear optimization problem is then decomposed into two linear sub-problems each with different set of decision variable, namely pumping rates and water level drawdowns which are iteratively solved using Simplex method until convergence is achieved. A brief description of the hybrid LP-LP approach is given here for the sake of completeness while more detailed description of the method can be found in (Khadem and Afshar, 2012). Q-LP stage Assuming known (randomly generated) values for the piezometric heads hi , j , a problem is defined to find the pumping rates Qk; k=1,...,n to minimize the following objective function: f c Qk hk hk n (12) k 1 Subject to the following constraints: n Q k k 1 D (13) Qmin Qk Qmax k 1,...,n (14) Where definition of the water level drawdown in terms of the piezometric head s k hk hk is introduced with h k representing the initial piezometric head. This problem is clearly a LP problem which can be efficiently solved using Simplex method leading to optimal pumping rate of the wells for the assumed value of the piezometric heads. H-LP stage Having found the pumping rate Qk; k=1,...,n in the first stage, a second optimization problem is defined to find the piezometric heads h k to minimize the following objective function: f c Qk hk hk (X i, j Yi, j ) n (15) k 1 Subject to the following constraints: 2 x 2 y 2 hi , j y 2 hi 1, j hi 1, j x 2 hi , j 1 hi , j 1 X i , j Yi , j Qk T (16) hi , j smax hi , j hi , j k 1,...., n (17) Where is a constant value equal to 1 if FD mesh point (i,j) corresponds to the position of the well k and zero otherwise, Xi,j and Yi,j are two set of non-negative slack variables representing the possible constraint violations of an arbitrary solution, and is a large enough penalty factor so that any infeasible solution represented by non-zero value of Xi,j and Yi,j has a total cost greater than any feasible solution. The slack variables Xi,j and Yi,j are introduced in the LP stage to avoid failure of the Simplex method at the early stages of the computation where a feasible solution to the corresponding LP problem could not be found. The penalty term added to the original objective function as indicated in Equation 15 is meant to force the solution of the second stage towards the feasible region of the search space for which the slack variables Xi,j and Yi,j are identically zero.