Lab#3

Prescott, Arizona Campus
Department of Electrical and Computer Engineering
EE 402 Control Systems Laboratory
Fall Semester 2014
Lab Section 01
Thursday 1:25 – 4:05 pm
King Eng. Bldg. Rm 122
Lab Instructor:
Dr. Stephen Bruder
Lab 03
Modeling and Analysis of Systems
Date Experiment Performed:
Thursday, September 18, 2014
Date Report Submitted:
??, 2014
Group Members:
Student # 1 Name & Email
Student # 2 Name & Email
Instructor’s Comments:
Comment #1
Comment #2
Grade:
EE 402 Control Systems Lab Fall 2014
A formal write-up is NOT required for this lab.
1.
ESTIMATING THE TIME CONSTANT OF A 1
ST
ORDER SYSTEM
Consider the first order system shown in Figure 1.
The step response of the system, recalling that
L
1
a
(
a )
e
at , is
e
2.5
t
. By rewriting
R(s) s
5
2 .
5
C(s)
Figure 1 A First order system.
the response as
2 1
t e
0.4
, we can see that the system has a time constant of 0.4 seconds.
A first order system can be characterized by a time constant,
, and a final value. Three methods of obtaining the time constant will be compared. For each you will use MATLAB
to
plot the step response of the system shown in Figure 1 and thereby estimate the system’s time
constant using three methods (described below) and compare your results (show your work!!).
1.
Tangential Line Approach:
Determine the tangent to the step response curve at t = 0. Plot this tangential line
( y
m x ) and observe where it intersects the final value of the step response. The time coordinate ( i.e,. x -coordinate) of the intersection point provides an estimate of the system’s time constant (see textbook page 125 Section 4.1.1 for an example).
Figure 2 Step Response - Tangential Line Approach:
= ??
Names of Students in the Group Page
2
of 7
EE 402 Control Systems Lab Fall 2014
2.
Settling Time Approach:
Settling time provides yet another method for estimating
. After four time constants
( i.e
., t
4
), the value of the step response is within 2% of its final value. By estimating the time at which the step response has reached within 2% of its final value and dividing by 4, an alternative approach for estimating
can be realized.
Figure 3 Step Response - Settling Time Approach:
= ??
3.
Final Value Approach:
A third method for estimating
is to determine the time at which the output reaches 63% of its final value ( i.e
., 1
e
t /
t
1 0.3679
0.63
).
Figure 4 Step Response - Settling Time Approach:
Which method gave the most accurate result?
= ??
Names of Students in the Group Page
3
of 7
EE 402 Control Systems Lab Fall 2014
2.
ESTIMATING THE CHARACTERISTICTS OF A 2
ND
ORDER SYSTEM
2.i.
Analytical Approach
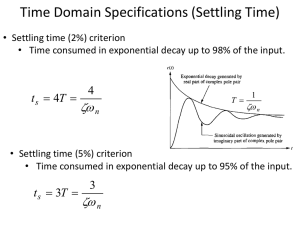
Consider the system shown in Figure 5 (left), and the generic form of a 2
nd
order system step
response Figure 5 (right). Referring to Table 1, use the mathematically equations from your pre-
lab to analytically determine the system’s parameters and enter these values in the table.
R(s)
+
s
2
10
6 s
26
C(s)
1.6
1.4
1.2
1.0
0.8
0.6
0.4
0.2
M c ss pt
T r
T p
Time (sec)
T s
Figure 5 A 2 nd
order system (left) and generic 2 nd
order step response (right).
c ss
2% c ss
2%
It may be necessary to review the second order system discussion in the Pre-lab, or see your class notes.
Table 1 Comparison of the System Characteristics: Analytical vs Emperical Approach
Steady State
Value c ss
Time to Peak
T p
Percent
Overshoot
%OS
Peak Value
M pt
Settling Time
T s
Analytical
Approach
Empirical
Approach
2.ii.
Empirical Approach
Using MATLAB, plot the step response of the system shown in Figure 5 (left). Using only
your plot, estimate the steady-state value, time to peak, percent overshoot, peak value, and
settling time and enter these values in Table 1. You may want to include multiple plots in order
to clearly show the various characteristics.
Names of Students in the Group Page
4
of 7
EE 402 Control Systems Lab Fall 2014
Figure 6 MATLAB derived unit step response.
3.
THE RESPONSE OF A HIGHER ORDER SYSTEM
For the system analyzed in the Pre-lab assignment Part II (Figure 4) assume that M = 1 kg, B
= 1 Ns/m, and K
1
= K
2
= 1 N/m. Use Simulink
®
to model the system ( X
1
( s ) is the output and
F ( s ) the input) and plot the unit step response of the system.
Figure 7 Simulink block diagram.
Names of Students in the Group Page
5
of 7
EE 402 Control Systems Lab Fall 2014
Figure 8 Simulink derived unit step response.
This response is neither exactly a first or second order system unit-step response. Which does it more closely resemble and why?
HINT
: Look at the pole locations (pzplot(“sys”)).
Names of Students in the Group
Figure 9 Pole locations.
Page
6
of 7
EE 402 Control Systems Lab
4.
APPENDIX A – MATLAB CODE
Table 2 MATLAB Code for ???
Fall 2014
Names of Students in the Group Page
7
of 7