Preparation_Instruction
advertisement

Determination of zero crossing frequency and likelihood function for
maximum displacement in real time earthquake signal
P.K. DUTTA1, O.P. MISHRA2, M. K. NASKAR1
1. Research Fellow, Advanced Digital Embedded System Lab, Electronics and Telecomm. Dept., Jadavpur University,
Kolkata, India and Faculty,Electronics & Automation, D.G. Shipping, Kolkata, India
Email: ascendent1@gmail.com
2. Scientist,National Centre of Seismology, Ministry of Earth Sciences, New Delhi, India
Email: opmishrasaarc2010@gmail.com
3. Advanced Digital Embedded System Lab, Jadavpur University,Electronics and Tele- Comm. Dept., Kolkata,
IndiaEmail: mrinalnaskar@yahoo.co.in
________________________________________________________________________________________________
Abstract:
In the proposed work, we analyze high-frequency directivity effect based on accelerometric data to observe whether
rupture process of this event had a strong directivity effect. Directivity analysis of ground motion in the direction of slip
propagation for fault rupture is close to that of the shear wave. In the proposed study, special attention has been made
to the non-stationarity in frequency contents of ground motions for studying the statistical properties and attenuation
laws of non-stationarity in frequency contents due to their nonparametric nature. In contrast to displacements
inferred through integration of seismic data alone for the characterization of the non-stationary in frequency contents of
ground motions has been proposed to study the short time amplitude analysis of the waveform signals. We estimate
the zero crossing rates for waveforms for maximizing the correlation between two events that occur on the periodogram
output. New criteria in the selection and synthesis of ground motion using a zero crossing rate for better warning
scenarios. Our results show that Kalman filter is better in linearizing the system process and measurements and can be
used to derive non-stationary characteristics of the future envelope of the response spectra for early detection of
earthquake aftershock analysis. Based on the accelerometric data available for the Sikkim Earthquake of 2011 for
seismic signature of the earthquake as triggering function for the slip as forecast errors were correlated with elements of
the information set. Our results prove that directivity effect of a seismic rupture can be found from acceleration traces.
KeyWords—earthquake ground motion, non-stationarity, frequency content, filter, Sikkim Earthquake, zero-crossing rate
___________________________________________________________________________________________________________
P.K. Dutta, O.P. Mishra and M.K. Naskar
I. INTRODUCTION
Real time strong motion data is often acquired from
dense seismic network recording for giving a rapid
earthquake response. The goal of the strong motion data
processing algorithm involves giving suitable response for
a certain ground shaking through correlation of peak
ground acceleration amplitude with seismic intensity [1,2]
using signal processing analysis. The modeling, statistical
properties and attenuation laws of non-stationarity in
frequency contents of peak ground acceleration have been
the open issues in earthquake engineering. Due to time
bound constraints in the real world, acceleration data and
signal amplification are often nonlinear and non- stationary
which makes the processing of such signals a difficult task
constraining analysis for amplitude variation for signals. In
order to document
the characteristic feature of signal
amplification from ground motion acceleration data which
causes the proposed study has taken recorded peak ground
acceleration data of magnitude 6.9 earthquake in the
Himalayan states Nepal and Sikkim (India) that hit on
2nd,October, 2011 from IMD acquired from 10 stations
recorded during the earthquake event. Directivity of the
rupture process is a parameter of the seismic source that
plays an important role in the generation of stronger
ground motions which is distributed in an elongated pattern
centered along the axis of the fault. In the direction of
directivity, stations that see the rupture coming, the
duration of the apparent source-time function [3] is shorter
than the real duration of the process on the fault. As a
consequence at equal epicentral distances and for the same
site conditions, the ground motions will be higher in the
direction of directivity. The proposed work outlines tools
for non-stationary and nonlinear acceleration time series
analysis to have good potential for application in a wider
geophysical context. It has been found that long period
pulses which may or may not be visible in the acceleration
traces, but they are readily distinguishable in the velocity
traces. These velocity pulses appear to be stronger when
the rupture propagates towards the site (forward
directivity). It can be proved that rupture directivity can be
proved using acceleration data traces although very less
work has been done in this regard [4]. In order to analyze
directivity characteristics from time series data, stochastic
analysis needs to be conducted that can exploit powerful
recursive methods of estimation analysis of data generated
for non-stationary and nonlinear time series data as in
earthquake monitoring. It has been found seismic waves
observed through earthquake accelerogram record manifest
clearly non-stationary characteristics, as well as wide
frequency content. Based on the acceleration-time series
records, earthquake magnitude and the on-site groundmotion intensity could be estimated and secondary
estimates for warning can be issued. Several researchers
like [5] found characteristic measurement of the
predominant period (tP, max) in the few seconds after the Pwave arrival onset, or that proposed by [6] based on the
peak displacement amplitude. Understanding the structure
of the earth’s crust and mechanical nucleation models
prevalent in geo-analysis and initiation ofseismogenesis
[7-8], there is a requirement to initiate analysis of slip
velocity
locally as there exist gradients due to
heterogeneity that complicates any interpretation of the
seismic sequence in terms of a precursory process. We
present a less subjective and more real time oriented
measurement using integration of accelerometer data that
avoids problematic baseline corrections suggested by [910] as function form fitting developed in time domain
averaging in short term vs long term averaging (STA) of
strong motion data giving improved broadband record of
ground displacements, spanning the broadest possible
spectrum of static deformation. The proposed approach is
suitable for dense networks and real-time processing
required by early warning systems and rapid earthquake
response. In current seismological practice, strong-motion
displacements are obtained from double integration of
accelerometer data. The first characteristic measures
variations with time of the intensity of the ground motion
(acceleration, velocity or displacement). At the onset of the
earthquake rupture, with the arrival of the first seismic
wave, energy of the earthquake builds up rapidly to a
maximum value [11] for a certain time and then decreases
slowly until it vanishes. The second characteristic involves
identifying mean square error variations with time of the
frequency content having a tendency to shift to lower
frequencies as time increases. The information that is
inferred from accelerogram outputs involve peak
acceleration;duration of shaking ;strength of shaking due
to peak ground acceleration, peak ground velocity and
peak ground displacement (PGD) extracted by processing
accelerograms[12]. The first step developed in the
proposed work involves an optimal modeling technique
based on acceleration data and identifying the
characteristic functions like short term energy and zero
crossing rates. Being specifically designed for real-time
monitoring, our method provides distinct advantages for
rapid earthquake response, determining the intensity of a
large earthquake more quickly or deciding whether the
rupture will propagate over part of or the entire fault for
shaking and non-shaking behavior. An analysis of past
records shows that the strength of the oscillations exhibited
by the number of zero crossings and extremes in a given
interval and the non-stationary random nature revealed by
the time-dependent variance function are important
characteristics. Using this information, a stationary random
process modulated by a deterministic function has been
developed to find their mean square error has been
compared. In the proposed work, peak motion behavior for
accelerogram data is found for Sikkim Earthquake and our
results show that larger distance for hypocenter presents a
relatively slower rate of decay measured using zero
crossing rate. Being specifically designed for real-time
monitoring, the proposed method provides distinct
advantages for rapid earthquake response in determining
the magnitude of a large earthquake more quickly or
deciding whether the peak in amplitude is going to occur at
a future defined instant. Due to the lack of quantification of
systematic differences in ground motion time-histories
(acceleration, velocity and displacement), and linear and
nonlinear structural responses introduced by various
processing techniques, it was therefore necessary to apply
the auto regressive model to limit segments of data, as
large variations in mean square error is observed as the
earthquake progressed. We have used kalman filter to
find
smoothed estimation of the parameters of the
acceleration time series model using filtering, smoothing
P.K. Dutta, O.P. Mishra and M.K. Naskar
and prediction in which the parameters being estimated by
mean square error is checked for optimal balance among
the parameters for a recursion based model that varies with
time [13].
2 ANALYSES OF TIME SERIES DATA
Accelerometers are easy to design and maintain due to
their less sensitivity and sample data obtained in time
series can be extracted by multiplication of scaling factors.
Acceleration spectrum is one of the most direct and
common functions used to describe the frequency content
of strong ground earthquake shaking [14]. A time series is
a sequence of random variables y(t)= f{y(t); t =0;±1;±2;:::}
representing the potential observations of the process,
which have a common finite expected value E(xt)=µ and a
set of auto-covariances C(yt;ys)= Ef(yt -µ) (ys- µ)} = γ|t-s|
which depend only on the temporal separation τ = |t-s| of
the time ‘t’ and ‘s’ and not on their absolute values. We
present a new solution to the classical problem of deriving
displacements from seismic data suitable for real-time
monitoring. Time series analysis is essentially concerned
with evaluating the properties of the probability model
which generated the observed time series. One way of
describing a stochastic process is to specify the joint
probability distribution of xt1, ..,X tnfor any set of time tl,…,
tnand any value of ‘n’. It is observed that most time series
are stochastic as the future values are only partly
determined by past values, so that exact predictions are
impossible and by the idea that future values have a
probability conditioned by knowledge of past values. It is
an iterative process, where it first computes the meanshift value for the current point position, then moves the
point to its mean-shift value as the new position, then
computes the mean-shift until it fulfills certain conditions.
Some studies of filtering and deformation analysis were
performed in order to detect failures and outliers, and to
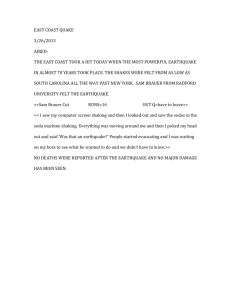
Figure 1: Plot for identifying acceleration time series energy
spectrum and zero crossing points to see where the maximum
transitions in shaking occurred from Gangtok data
increase the reliability of the deformation analysis. The
first problem is the estimation of the arrival time of the
seismic signal. When an earthquake occurs, its location is
estimated from arrival times of the seismic waves at
several different observatories. This is non stationary by
nature while several notions have been set forth for
practical purpose, the zero-crossing rate is used to describe
the non-stationary in frequency contents and the
instantaneous spectrum is used to describe the nonstationary both in amplitude and frequency contents of
spectra.Energy of a seismic signal is another paramet
er for classifying as the high energy because of its p
eriodicity and the unshaking part has zero crossing ra
te (ZCR) and high energy. Advantage of using zero
crossing rate in non-stationary signals like earthquakes is
that one can plot the signal in a time frequency space
enabling the energy distribution in the signal to be
observed. Based on the rupture analysis, we calculate the
arias intensity pattern which says that total energy which
is delivered during an earthquake depends on the zero
crossing
rate
variations[15] is said to occur if successive samples h
ave different algebraic signs as in Figure 1.
The rate at which zero crossings occur is a simple m
easure of the frequency content of a signal [16].
Identifying characteristics of structural seismic response
based on amplitude and frequency duration and the non
stationary properties in amplitude and frequency contents
can also influence the structural seismic response
significantly. Maximum amplitudes correspond to a point
in the time-frequency plane where several time-frequency
characteristics of the signal concentrate where ‘x’is slip
associated with the system identified from zero crossing
rate ‘ y’as the measured output or the associated
acceleration. Since high frequencies imply high zero
crossing rates, and low frequencies imply low zerocrossing rates, there is a strong correlation between
zero-crossing rate and energy distribution with
frequency. Time domain representation of edge signals
looking at zero crossing to identify samples time when
negative and the next is positive as the time between the
successive zero crossings and measure T as the successive
crossing in the same direction. Peak detection analysis for
complete extraction of the energy ratio of the signal based
on zero crossing edge detection end point detection based
on short term analysis and zero cross rate to identify the
features
of
the
waveform.A reasonable generalization is that the zerocr
ossing rate is high, the
signal is non periodic as
when the
zero-crossing
rate
is
low then
the signal is periodic.Spectral analysis and improved
algorithms for time domain representation of edge signals
looking at zero crossings to identify the points in time
when the sample is negative and the next is positive ; we
measure time between the successive zero crossings in the
same direction. A reasonable generalization is that if
the zero-crossing rate is high, the shaking of the body
is non periodic
if the zero-crossing rate is low,
signal is periodic which is helpful in predicting the
model. Efficient warningfor time domain representation
of edge signals looking at zero crossings can identify the
instant time when the sample is negative and the next is
positive to evaluate time between the successive zero
crossings and measure ‘T’ as the successive crossing in the
same
direction
as
the rupture follows a slip occurs in more or less an i
ndependent manner generating high frequency waves
P.K. Dutta, O.P. Mishra and M.K. Naskar
[17]. There is a gradually decreasing tendency in the
slopes of the cumulate zero-crossing curves. The zerocrossing model fits the actual result perfectly and the
precision is satisfactory. The non-stationarity in
frequency contents is an important property of earthquake
ground motions besides the conventional properties in
amplitude, frequency and duration. The study has been
differentiated into three parts. The first part involves
analysis of elastic deformation based on signal processing
analysis involving the energy of the spectrum through
analysis of the Arias Intensity and the zero crossing rate, in
the second phase as the arrival time is estimated by using
the locally stationary autoregressive model. A detailed
physical interpretation of the zero-crossing rate ν0(t) has
been made in [18] which stated that the zero-crossing rate
ν0(t) was related to first- and second-order spectral
moments of
the earthquake ground motion
x(t). Identifying the zero cross edge detection for short
term energy and zero cross rate for last waveform and in
the third part, a peak detector algorithm and a kalman filter
approach is developed to find the nature of inelastic
deformations and effectively find the slip rate the state of
zero crossing for subtle parts of the spectrum. Specific
instrumentation has been made for this purpose including
magneto-acoustic sensors which has a sensitive core made
of elasto-magnetic material, which changes its
magnetization in response to elastic deformation designed
by [19]. This tool has a phenomenal peak displacement
sensitivity of about 1 femto-meter which improves the
analysis of duration and amplitude is implicitly considered
by [20] using mean square acceleration during the rise time
of strong motion earthquake for defining earthquake
average power. To describe these non-stationary properties
efficiently, several notions have been set forth for practical
purpose, while the zero-crossing rate is used to describe the
non-stationarity in frequency contents and the
instantaneous spectrum is used to describe the nonstationarity both in amplitude and frequency, the
instantaneous spectra is estimated by using kalman filter. It
has been accounted by [21] the effect of maximum
amplitude duration and frequency content in describing the
earthquakes destructive potential whereby PD=IA/
0 2
where IA is the Arias intensity and 0 is the intensity of
the zero crossing defined as N0/TD where N0 is the total
number of zero crossings in accelerogram for total duration
TD with positive and negative slope for earthquake power
and Arias intensity are comparable. The velocity and
displacement sequences are obtained by integrating the
trapezoidal rule and zero initial conditions. The resulting
acceleration is integrated in the time domain through
trapezoidal rule to obtain velocity sequence assuming zero
initial
conditions.The
parameters
for
predictive
decomposition can be estimated by the maximum
likelihood method based on Kalman filter and Linear
Predictive filters in seismic traces [22] to carry out
maximum likelihood estimation for ARMA and ARIMA
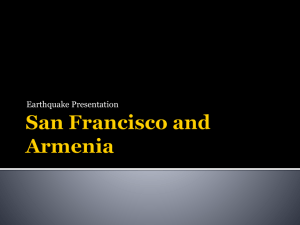
processes with missing values as shown in Figure 2.
Forecasting methods
are predicated based onthe
likelihood of observations at times t1,...,tn can still easily be
computed
using
the
discrete-time
Kalman
recursions[23].Velocity sequence is again high pass filtered
which reversed in time gives high passed velocity sequence
without phase shift. The velocity sequence is integrated in
the time domain to obtain displacement sequence.
Analyzing the displacement sequence to verify the nature
of peak can provide sufficient warning behavior to
earthquake occurrence. The frequency content of the
signal also changes
from the causative fault and
predominant period shows a relative increase with
distance as high frequency waves attenuate faster with
distance in the crustal rocks. Areas of large displacement
indicate small compact high stress drop sources in strong
rock while low displacement indicate large low stress drop
sources in weak or fractured rock. Large displacement will
be deficient in long periodic energy or richer in high
frequency energy which has been analyzed for the source
characteristics.Zero crossing is said to occur if successi
ve samples have different algebraic signs area with the
maximum power in a time/frequency signal.Our analysis
involves waveform resulting from slip to identify long the
amplitude edge takes to come back to zero state by
identifying the zero cross edge detection for short term
energy and zero cross rate for last waveform. Most of the
current earthquake prediction methods use seismicity
change as an indicator of the stress changes that cause
earthquakes. Low frequency signals effecting the
integration is over shadowed by amplitude –frequency
characteristics with high peaks and zero initial condition.
Peak detection technique involving use of filter have been
applied on structural identification problems, structural
control, and forecasting for finding the future samples of
any earthquake signal. Short time amplitude analysis of
records for earthquake behavior models can be used at
present for earthquake monitoring networks have natural
limitations in terms of their highest operating frequencies
(and smallest detectable events) they can sense, which
restricts their ability to collect enough useful data to
monitor changes in seismic activity. Smaller seismic events
are much more frequent than larger events (such as
discernible, detectable earthquakes), but require probing at
higher frequencies to be detected. A sensitive high
frequency tool such as MAS is needed to record the morefrequent low-magnitude events in a catalog. A small
magnitude-2 event occurs several times per week at
SAFOD, the MAS records up to several dozen smaller
events per second there.
Figure 2:Spectral analysis involves analysis of ARMA and ARIMA
model predictions
P.K. Dutta, O.P. Mishra and M.K. Naskar
The frequency content of these seismic signals has been
studied to retrieve displacement waveforms by double
integration of acceleration-time series records. Integration,
in the time domain is infinite [24], non-localized analysis
for any signal. In this section we provide an overview of
the estimation applied in seismological analysis. We have
implemented and compared Kalman filter and a linear
predictive estimator for predictive decomposition of
seismic traces to find which filter is more sensitive to
estimate future signal bias value. Various researchers
studied the analysis of time series in great depth like time
series regression analysis postulates a structural equation
model and tests it using time series data [25]; application
of bootstrapping to time series data [26]; Grey Model in
time series [27].
strong, with the main peaks spreading towards higher
frequencies than in the actual quake. The basic
periodograms acquired were fairly consistent between the
real data set and the predicted set, and neither showed the
presence of sinusoids. Quasi static events for co-seismic
events are static but the transition through slip, rise time of
the rupture onset, barrier interval, local stress drop and
maximum frequency for actual earthquake is determined
based on PGA, Arias intensity (AI), and Tri-funac
bracketed duration, Td.
Figure 4: Periodogram Analysis for data using Multiple
Window Method
Figure 3: Kalman output behavior against observed seismicity
levels and peak output
We found that a Kalman filter is better than linear
predictive filter which contains certain characteristics not
represented in real data. The autoregressive signal x and
returns as output the prediction error. However, A (z) has
the prediction filter embedded in it, in the form B (z) = 1A(z), where B(z) is the prediction filter. The prediction
error power (variance) is calculated for LPC and non linear
Kalman filter which is minimal for kalman filter while
more in LPC. Since the stationary time series with given
auto covariance structure can be approximated the
covariance structure changes with time, then the
corresponding seismic trace also changes with time.
3. IDENTIFIED CHARACTERISTICS FROM THE
TIME SERIES DATA ANALYSIS
Acceleration time history is the most comprehensive
analysis for salient features like peak velocity time and
frequency for elastic and inelastic response spectra
analysis, arias intensity, rms acceleration and fourier
spectra power spectra and spectrum intensity. Peak
acceleration and peak velocity are linearly related to focal
depth. Digital low pass filtering is performed [28] on a new
set of data to obtain the best possible fit of acceleration
zero baseline. The function is constrained in the analytic
design for a rupture occurs and we have no idea how many
peaks in the seismic behavior that can affect the system.
When the input signal changes rapidly then the average
will change. Most appropriate technique for analyzing the
frequency content of data and model would be to apply
periodogram methods for a sliding window moving across
the entire data set as shown in Figure 4. For the linear
predictive model, however, the correspondence is not as
Slip can be found by analyzing the vertical and horizontal
components of the waveform then modeled it in a filter
algorithm to find the peak acceleration velocity and
displacement components.
3.1 Kalman filtering based on recursion
Kalman filter [29] is a recursive algorithm used to estimate
hidden state of a dynamic system using noisy observations.
If ti is the present time and tj is the time at which we want
to estimate the position of a dynamic or moving platform.
To identify peak nature over a time interval estimated
component frequencies for data for power spectrum
analysis for filtering process is constantly " forecastrecursive manner calculated to predict the value of the first,
and priori value is observed and the kalman gain for
weighted items on the predictive value of time to find
linear process governed by an unknown inner state
producing a set of measurements. It is found that there is
a discrete time system and its state at time ‘n’ is
given by vector ‘i’. The state in the next time step ‘n + 1’
is given by efficient minimum mean square error of the
system state estimation of process state at the time ‘n’ as a
loss function and the noise measurement values obtained
feedback. The accuracy of the forecast in predicting the
timing of concentration of peak amplitude and minimum
values has been measured by a lead/lag correlation analysis
with correlation values between observations and
predictions computed with a lag in time. Kalman filter
improves forecasts of spectral time series amplitude
(measured by root mean square error) and the ability to
predict rare events (measured by the critical success index),
for deterministic and ensemble-averaged forecasts. The
optimum value of the estimate x gives the estimated value
as a post- processing predictor bias-correction method.
P.K. Dutta, O.P. Mishra and M.K. Naskar
Kalman filtering is proven feasible to be implemented in
real-time to eliminate the high frequency noise. Improved
broadband record of ground displacements and velocities
over the full range of frequencies sampled by the
accelerometer data, as well as the static deformation. The
periodograms obtained for these three sections with
Kalman prediction are shown in Figures 4. For the linear
predictive model, however, the correspondence is not as
strong, with the main peaks spreading towards higher
frequencies than in the actual quake. While it is possible
that these results are close enough to allow effective
structural control, it's not clear that a more accurate model
with less warning time might not still be preferable.The
velocity noise is a random variable that changes with time.
vk
pk (1)
xk
T 2 / 2
1 T
xk 1
x
uk wk
k
0 1
T
x
(3)
Finally, knowing that the measured output is equal to the
position, we can write our linear system equations as
follows:
K n Vn|n 1 H nT ( H nVn|n 1 H nT Rn ) 1
xn|n xn|n 1 K n ( yn H n xn|n 1 )
whereby we define a state vector ‘x’ that consists of
position and velocity. Using a filter with maximum power
for power spectrum and signal frequency and peak
calculation based on AR, ARIMA and kalman filter model
for signal power and certain spectrum calculation based on
normalized
frequency
and
magnitude.
Kalman filter is very good for on-line estimation in “realtime” peak estimation. Kalman filter is an algorithm that
uses state estimates of model parameters combined with
estimates of their variance to make predictions about the
output of a linear dynamic system. Kalman filter is a
recursive estimation method, which is based on the
minimum mean square error criterion, but it does not
require all past observations, but according to a previous
state equation and recursive estimation method, which is
based on state solution given in the form of variable
estimates, at steady state. The fixed interval smoother
incorporates the maximal amount of information
(compared with other smoothing algorithms) and consists
of three conceptual steps: the forward Kalman filter has a
backward filter known as the information filter which is
applied in reverse time order to the entire time series. The
system from the network formed by the variance of the
noise source Wk when its variance is small, the resulting
signal is small, the signal being completely buried in the
noise or filtered out. When the variance increases, the
greater the signal amplitude, the better the Kalman filter
performs. The measuring equation vk measurement error
introduced. It is a representative of a random vector of
measurement errors, Rv greater, indicating that the greater
the noise introduced, the smaller the signal to noise ratio,
the signal filtered difficult; when Rv becomes small, the
signal can be easily filtered out. Particular frequency
components can be identified with the respective times
[30] that match with the maximum amplitudes in the time
domain of the earthquake record. Time update equations
can also be regarded as process estimates equation,
measurement update equations can be regarded as
correction equation. Routine processing of accelerograms
with high rate displacements are performed and successive
point increase with time is
In a sense, the Kalman gain weights the adjustment to the a
priori estimate once a measurement is available by
modulating the correction to be applied due to the
measurement residual, zk+1 – Hk+1 ^ xk-1, which is the
difference between the apriori state estimate and the actual
measurement. Finally, knowing that the measured output is
equal to the position, we can write our linear system
equations as follows:
vk 1 vk Tuk v ~k . (2)
Vn|n ( I K n H n )Vn|n 1
^
^
xk 1 ( A x k Buk ) K k ( yk 1 C x k )
(4)
(n) E[e (n)]
2
First term used to derive the state estimate at time ‘k + 1’
is just ‘A’ times the state estimate at time ‘k’, plus ‘B’
times the known input at time ‘k’.This would be the state
estimate if we didn’t have a measurement. In other words,
the state estimate would propagate in time just like the
state vector in the system model. Second term in the
equation is called the correction term and it represents the
amount by which the propagated state estimate has been
corrected due to our measurement. If the measurement
noise is large, Sz will be large, K will be small and we
won’t give much credibility to the measurement y when
^
computing the next ⏞
𝑥̇ .Else, if the measurement noise is
small, Sz will be small,
3.2 Identifying a delay likelihood function
Broadband record of ground displacements which spans
the broadest possible spectrum of dynamic motion includes
the static deformation having bandwidth for Kalman filter
in different applications. Time varying coefficients
associated with distribution of the spectral peaks in timefrequency plane than Kalman filter, and its time and
frequency resolution to track the local properties of
earthquake ground motions and to identify the systems
with nonlinearity or abruptness. but finding time
independent slip analysis involves peak extraction from
displacement curve parameter estimation methods
forecasting methods using the difference equation. This
design of likelihood function is based on the maximum
displacement Amax that the sensor observes when in
contact with a seismic wave. However, a sensor does not
observe the maximum displacement immediately after the
wave arrives, but rather after a period of time. In this case,
the initial estimates will be highly incorrect using this
likelihood function. A delay term α(.) can be included to
approximate the instantaneous displacement before the
maximum is observed. Aexp= α(t-t0-tp)Amax where 0≤ α(.)≤1
that each station makes independent observations and the
collection of observations from all stations is z, the
P.K. Dutta, O.P. Mishra and M.K. Naskar
complete
likelihood
function
becomes
n
L(z|x, y,D,M,t 0 )= L(zi |x, y,D,M,t 0 )
i1
(5)
A future state can be predicted at a desired time point n+1
using the last value at time point by scanning the list of all
states in phase space to find the one closest to the phase
state value at time point n. If a time point n0 is found where
the phase state is similar to that at n (this means xn0 it is
close to xn). Then the continuity of the underlying
dynamical system and the representation guarantees that
xn0+1 will also be close to xn+1. More often than not the
measurement function is as unknown as the underlying
equation of motion delay reconstruction and the sequence
of phase state values representing is called the delay vector
Sn = (sn−(m−1)v, sn−(m−2)v, . . . , sn − v, sn).This method
is very inefficient if more than a few predictions are needed
to find the optimal set of parameters of time delay and
dimension. For each prediction all points in the
reconstruction are considered. This is also same for the
elastic section using zero crossing rate and energy intensity
analysis. Since the peak is measured at time k instant of a
certain peak where [31] highlighted four key points of the
Kalman filter, namely that the process is recursive, that
there are many forms of the update formula, that the error
covariance matrix for error covariance as Kalman filter
suits dynamic problems. Kalman filter has a certain
covariance recursive constantly to estimate the optimal
value. The process for each iteration of the recursive
Kalman filter similar process, the difference is that each
recursive time, the need to calculate the system noise
vector ω (k) and the measurement noise vector υ (k), y (n)
is estimated, greatly reducing the impact of noise on the
signal, the mean square error substantially reduced and
each step of the measurement and Kalman filter is applied
to obtain an optimal estimate of the project’s true state that
minimizes the mean squared error. This may be done by
successive substitution using a backward shift operator.
Full waveform inversions are only performed using seismic
data, and none use displacement directly. Because the state
vector has the memory of several successive optimal
position coordinates, this deformation epoch can still be
detected again in the succeeding following epochs after the
deformation epoch has been detected at the first epoch.
Based on this implementation, the reliability todetect
thedeformation epoch can be improved (Li and Kuhlmann
2010). After the effect of noise or random fluctuation in the
observed data is eliminated, the Kalman filter proceeds by
repeating the prediction process in the recursive learning
cycle until the completion state is reached. Champawat,
Pitorgarh and Udham Singh Nagar and Sikkim earthquake
which are at an average same distance from the measuring
around 850 km recorded similar behavior.
4. IMPLEMENTATION
We use Kalman filter to estimate the parameters of time
series model based on measurements as it performs with
minimum mean square error of the system state estimation
recursive method calculation. The kalman filter involves a
process update step and correction step was replaced with
measurement update step which is more correct. High pass
filtering is done on the displacement curve and a peak
detector analysis is applied. In the first step of the kalman
filter, state is predicted with a dynamic model. In the
second step it gets corrected with the observation model so
that error covariance of the estimator gets minimized. The
shift introduces apparent periodicity in the displacement
which enables us to detect peaks minimizing the variance
of the estimation error. Minimum error unbiased estimator
involving kalman filter in the forward direction solves the
prediction problem, but if data are available over some
interval and all that data past and future are used in the
estimation, then the estimate at any given point can be
improved. Value can be predicted by the filter, but also can
be filtered by the forecast, and its interaction filtering and
prediction, does not require the storage of any
observational data, real-time processing. The Fourier
transform and the spectrogram, artificial high-frequency
signals could be generated if the window length is shorter
than the predominant periods of the input seismic
waves. Since high frequencies imply high zero crossi
ng rates, and low frequencies imply low zerocrossing rates, there is a strong correlation between ze
rocrossing rate and distribution with frequency. Spectra
l splitting is a small probability event, only through the
large number of tests can be observed. Any type of filter
tries to obtain an optimal estimate of the desired quantities
(the system’s state) from data provided by a noisy
environment the Kalman filter, i.e., the filter that
propagates the conditional pdfp(xk)|Y 1k , Uk−10 ) and
obtains the state estimate by optimizing a given criteria, is
the best filter among all the possible filter types and it
optimizes any criteria that might be considered.
A novel methodology for earthquake forecast using sensor
networks of advanced strong motion instruments under this
piece of research consisted of following steps and shown
in figure:
(a) Making statistical estimate of the earthquake
acceleration adequately well in advance
(b) Next step was to determine the optimal balance of
model parameters and error bar.
(c) Analyzing the frequency content of data and
model using periodogram approach
(d) Analyzing the peak motions behavior with
accelerogram data for Sikkim Earthquake data based on
energy and zero crossing rate of delivery of earthquake
energy with time.
(e) Once the displacement is found we had applied a
difference equation for identifying the non-stationary of a
time series. The difference factor can be attributed to the
presence of unit roots in the autoregressive operator, the
series can be forecast by forecasting its dth difference.
With the help of‘d’ initial conditions, the forecasts of the
difference can be aggregated to generate a forecast of the
level of the series. The d th difference is identified based
on the data for Chamoli, Gangtok and Siliguri stations
which shows that there are strong influences after 25 secs
of the mainshock recording started which shows when the
strongest slip occurred likely.
(f) A delay term α(.) included to approximate the
instantaneous displacement before the maximum is
observed.
Aexp= α(t-t0-tp)Amax
(6)
where 0≤ α(.)≤1; whereby each station is found to have
made independent observations and the collection of
observations from all stations. Amax is used than the
maximum acceleration or velocity because the
P.K. Dutta, O.P. Mishra and M.K. Naskar
displacement metric preserves energy better over long
distance which will be better to study the rupture
directivity (Somerville et al., 1997). The data is a clear
identification of the seismic signature of the earthquake
and there was a triggering function for the slip as forecast
errors were correlated with some of the elements of the
information set.
Slip observation data for Siliguri
Slip observation
data for Siliguri
Slip observation
data for Chamoli
(a)
Slip observation
data for
Gangtok
(b)
(a1)
(b1)
(c1)
(b2)
(c2)
(c)
Figure 5: Flow Diagram of the Signal Processing Analysis
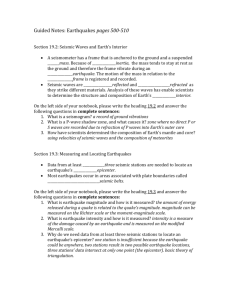
Accelerograms are corrected applying a high pass filter and
a velocity and displacement is calculated based on
trapezoidal rule as shown in Figure 6(a-b).
A similar equation can be derived for the position p:
^
^
p( xk / zk ) ~ N ( E[ xk ], E[( xk x k )( xk x k ) ]
Pk (1 K k H k ) Pk
T
(1)
(2)
(a2)
P.K. Dutta, O.P. Mishra and M.K. Naskar
(a3)
(b3)
(c3)
Figure 6( a-c ): (a1, b1,c1):Displacement behavior based on delay
analysis for slip detection (a2,b2,c2): Acceleration vs time series data,
along N-E, E-W, Vertical,( a3,b3,c3): Cumulative slip along the three
axes N-E, E-W, Vertical based on double integration of acceleration
time series data)
The data is a clear identification of the seismic signature
of the earthquake and there was a triggering function for
the slip as forecast errors were correlated with some of the
elements of the information set. There is an increase
observed in the slip which is triggered at around 18-27
seconds of the main shocks as shown in Figure 6(c). Our
study shows that the whole movement is instantaneous for
dislocation movement over a fault plane which can be the
spectral acceleration defined not as the maximum relative
acceleration, but as the maximum absolute acceleration as
the magnitude increases (e.g. frequency content and
duration). In addition, if it is a near-fault record, the
frequency of any velocity pulse will also reduce. In the
limit of very high system frequency, the system becomes
very rigid, and the spectral acceleration tends towards the
peak ground acceleration.
5. CONCLUSION
Since seismometers at longer distances from earthquakes
are either narrow or broadband filters of particle velocity,
the directivity factor may be reported by particle velocity,
but it can easily be converted to acceleration if that's what
you need to predict for a strong ground motion
accelerometer. The use of zero crossing rate with
likelihood estimation for maximum displacement will be of
great advantage as there will be no need to store the input
waveform. Identification of the peak detection rate for
complete extraction of the energy ratio of the signal based
on zero crossing edge detection end point detection based
on short term analysis and zero cross rate to identify the
features of the last waveform . We had adopted the
accelerometer data for finding the likelihood of the event.
The amplitude enhancement factor is frequency dependent,
enhancing higher frequency radiation in the direction of
rupture propagation. If the goal is to place sensors to
maximize detection speed and detection accuracy for a
geospatial event, the problem has not been addressed by
prior work for two reasons: (a) the sensors measure a
continuous manifestation of the event and the
manifestation of a geospatial event at any space-time point
(x; y; z; t) is given by a vector H(x; y; z; t) of acceleration
at point (x; y; z) in space at time t. Implementation of
narrow-band filtering had been performed [32] on routine
accelerogram data to obtain the best possible fit of
acceleration zero baseline. Directivity analysis of ground
motion in the direction of slip propagation [33] is a very
important phenomenon which appears when the velocity of
the fault rupture is close to that of the shear wave. The
algorithm is quite sensitive to the initial conditions, that
is, if the bounding initially not located in a good place
(or, equivalently it will go to a wrong place after some
movement of the object. Our results have indicated good
correspondence between the Kalman model and the real
data from the earthquake, suggesting that Kalman
modeling will provide adequate information to allow
structural controls to protect buildings from earthquake
damage. Particular frequency components can be identified
with the respective times that match with the maximum
amplitudes in the time domain correspond to a point in the
time-frequency plane where several time-frequency
characteristics of the signal concentrate especially during
the initial rupture. One problem comes up quite often is
that the state keeps on diverging but error remains small. In
the first step, the kalman filter state predicts the
accelerogram data with a dynamic model for small
window. In the second step, it gets corrected with the
observation model so that error covariance of the estimator
gets minimized. The basic kalman filter cannot provide any
prediction unless there are some available measurements as
the function involves smoothing out the noisy
measurements. Predict the near future of the signal might
be possible by some nonlinear modeling, but this type of
analysis cannot predict the far future unless dynamical
model of the system behavior has some strong correlation
with the past values in case of earthquakes particularly
dynamic data processing GPS, inertial navigation.
REFERENCES
[1] Wu, Y. M., &Kanamori, H. (2005). Experiment on an onsite
early warning method for the Taiwan early warning system.
Bulletin of the Seismological Society of America, 95(1),
347-353.
[2] Zollo, A., Lancieri, M., & Nielsen, S. (2006). Earthquake
magnitude estimation from peak amplitudes of very early
seismic signals on strong motion records. Geophysical
Research Letters, 33(23).
[3] Serra, E. M. T., Emolo, A., Orefice, A., &Zollo, A. (2013).
Earthquake source kinematics of moderate earthquakes from
the inversion of apparent source time functions. Geophysical
Journal International, 194(2), 1180-1189.
[4] Shabestari, K. T., Yamazaki, F., Saita, J., & Matsuoka, M.
(2004). Estimation of the spatial distribution of ground
motion parameters for two recent earthquakes in Japan.
Tectonophysics, 390(1), 193-204.
[5] Allen, R. M.,andKanamori, H. (2003). The potential for
earthquake early warning in southern California. Science,
300(5620), 786-789.
[6] Wu, Y. M., & Zhao, L. (2006). Magnitude estimation using
the first three seconds P‐wave amplitude in earthquake early
warning. Geophysical Research Letters, 33(16).
P.K. Dutta, O.P. Mishra and M.K. Naskar
[7] Mishra, O. P., Zhao, D. and Wang, Z. (2008) The genesis of
the 2001 Bhuj, India, earthquake (Mw 7.6): a puzzle for
peninsular India. Indian Minerals, 61(3-4), 1-4.
[8] Singh, A. P., Mishra, O. P., Rastogi, B. K. and Kumar,
S. (2013) Crustal heterogeneities beneath the 2011
Talala, Saurashtra earthquake, Gujarat, India source zone:
Seismological evidence for neo-tectonics. Journal of
Asian Earth Sciences, 62, 672-684.
[9] Trifunac, M. D. (1971a). Zero baseline correction of strongmotion accelerograms. Bulletin of the Seismological Society
of America, 61(5), 1201-1211.
[10] Boore, D. M., Christopher D. S., and William B. Joyner.
"Comments on baseline correction of digital strong-motion
data: Examples from the 1999 Hector Mine, California,
earthquake." Bulletin of the Seismological Society of
America 92.4 (2002): 1543-1560.
[11] Trifunac, M. D. (1971b). Response envelope spectrum and
interpretation of strong earthquake ground motion. Bulletin
of the Seismological Society of America, 61(2), 343-356.
[12] Fletcher, J. B., Brady, A. G., & Hanks, T. C. (1980) Strongmotion accelerograms of the Oroville, California,
aftershocks: data processing and the aftershock of 0350
August 6, 1975. Bulletin of the Seismological Society of
America, 70(1), 243-267.
[13] Cross, P.A. (1994) Advanced least squares applied to
position fixing, Working Paper No. 6,Department of Land
Surveying, University of East London, 205 pp.
[14] Hudson, D. E. (1962). Some problems in the application of
spectrum techniques to strong-motion earthquake analysis.
Bulletin of the Seismological Society of America, 52(2),
417-430.
[15] Manfredi, G., Polese, M., & Cosenza, E. (2003). Cumulative
demand of the earthquake ground motions in the near source.
Earthquake engineering & structural dynamics, 32(12),
1853-1865.
[16] Zhang, T. and Kuo, C. C. J. (1998). Content-based
classification and retrieval of audio. In SPIE's International
Symposium on Optical Science, Engineering, and
Instrumentation (pp. 432-443). International Society for
Optics and Photonics.
[17] Mishra, O. P., Dutta, P. K., &Naskar, M. K. (2013).
Relationship between earthquake fault triggering and
societal behavior using ant colony optimization. Advances in
Physics Theories and Applications, 26, 99-108.
[18] Li, Y.M. (1999). Modeling of strong ground motions for
engineering purpose, PhD dissertation, Chongqing Jianzhu
University (in Chinese).
[19] Belyakov, A.S. (2005), Magnetoelastic sensors and
geophones for vector measurements in geoacoustics.
Acoustical Physics, 51, 53–65.
[20] Housner, G. W. (1975). Measures of severity of earthquake
ground shaking. In: Proceedings of the US National
Conference on Earthquake Engineering (pp. 25-33).
[21] Araya R. and Sargoni G.(1984) Earthquake accelerogram
destructiveness potential factor. In Proceedings of the Eigth
World Conference on Earthquake Engineering San Francisco
California Usa pages II:835-842.Prentice Hall Inc New
Jersey,USA.
[22] Robinson, E. A. (1957)Predictive decomposition of seismic
traces. Geophysics, 22(4), 767-778.
[23] Allen, R. M. and Ziv, A. (2011). Application of real-time
GPS to earthquake early warning. Geophysical Research
Letters, 38(16), L16310.
[24] Iwan, W. D., Moser, M. A., &Peng, C. Y. (1985). Some
observations on strong-motion earthquake measurement
using a digital accelerograph. Bulletin of the Seismological
Society of America, 75(5), 1225-1246.
[25] Ostrom, C. W. (1990). Time series analysis: Regression
techniques (Vol. 9). Sage.
[26] Efron, B., and Tibshirani, R. (1986). Bootstrap methods for
standard errors, confidence intervals, and other measures of
statistical accuracy. Statistical science, 54-75.
[27] Chen, Y.Q. and Tang, C.(1993) Application of the theory of
grey system in the analysis of deformation analysis,
Proceedings of 7th
International FIG Symposium on
Deformation Measurement, Alberta 1993, pp. 303-309.
[28] Crochiere, R. and Rabiner, L. (1975). Optimum FIR digital
filter implementations for decimation, interpolation, and
narrow-band filtering. Acoustics, Speech and Signal
Processing, IEEE Transactions on, 23(5), 444-456.
[29] Kalman, R.E., (1960) “A new approach to linear filtering
and prediction problems,” Transactions of the ASME
Journal of Basic Engineering, vol. 82, no. Series D, pp. 3545, 1960.
[30] Zollo, A., Lancieri, M., & Nielsen, S. (2006). Earthquake
magnitude estimation from peak amplitudes of very early
seismic signals on strong motion records. Geophysical
Research Letters, 33(23).
[31] Joyner, W. B., and Boore, D. M. (1981). Peak horizontal
acceleration and velocity from strong-motion records
including records from the 1979 Imperial Valley, California,
earthquake. Bulletin of the Seismological Society of
America, 71(6), 2011-2038.
[32] Rabiner, L., &Crochiere, R. E. (1975). A novel
implementation for narrow-band FIR digital filters.
Acoustics, Speech and Signal Processing, IEEE Transactions
on, 23(5), 457-464.
[33] Travasarou, T., Bray, J. D., & Abrahamson, N. A. (2003).
Empirical attenuation relationship for Arias Intensity.
Earthquake engineering & structural dynamics, 32(7), 11331155.
Authors’ Profiles
P.K.Duttahas worked in the field of signal processing and
automation to study the effect of interdisciplinary studies in
catastrophic analysis and risk mechanism in Advanced Digital
and Embedded System Labaratory, Jadavpur University. The
major focus of research is the study of complex processes
involved in Earthquake Genesis Mechanism Validation and
Warning System Design. His research interests include
computational intelligence, operating system,signal processing
and wireless communication. He has done this work by using
real-time acceleration data available from Indian Meteorological
Division, New Delhi after the Sikkim Earthquake of 2011.
Dr O.P. Mishra has been rewarded Doctorate in Science in 2004
from Geodynamics Research Center, Ehime University ,Japan
for his work in the field of seismic tomography and tsunami
generating mechanism in north-east Japan and Indian regions . He
is an expert of Applied Geophysics and solid earth science
dealing with seismological research and disaster risk management
system.Authors of more than 100 per reviewed papers and
reports of national and international repute. Currently he is on
deputation from Geological Survey of India in the Ministry of
Earth Sciences, India;An Indian governmental organization of 8
South Asian countries (Afghanistan,Bangladesh,Bhutan,India,
Maldives, Nepal, Pakistan,SriLanka).He is the recipient of
National Mineral award 2008 by the Government of India in the
field of disaster management under applied geosciences.
Dr M .K Naskar received his B.Tech (Hons.) and M.Tech from
E&ECE Dept., IIT Kharagpur in 1987 and 1989 respectively and
Ph.D. from Jadavpur University in 2006. He served as a faculty
member in NIT, Jamshedpur (then RIT Jamshedpur) and NIT,
Durgapur (REC Durgapur) from 1991-1996 and 1996-1999
respectively. Currently he is a Professor in the Department of
Electronics and Telecommunications Engineering, Jadavpur
University, Kolkata, India and in-charge of the “Advanced Digital
and Embedded Systems Lab”. His research interests include
Wireless Sensor Networks, Optical Networks and Embedded
Systems.