Modeling Predator-Prey Interactions
advertisement

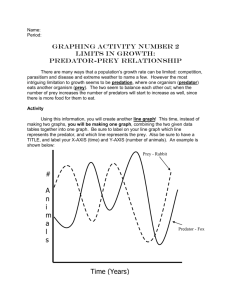
Jennifer Gardner Project 2 Fish 454 Modeling Predator-Prey Interactions with Insights into Causes of Stability By: Jennifer Gardner1 and Tim Essington1 1 School of Aquatic and Fishery Sciences, University of Washington, Seattle, WA. 1 Jennifer Gardner Project 2 Fish 454 Introduction Predator-prey interactions are ubiquitous in nature, yet are a unique type of ecological interactions whose properties require further understanding. The most notable aspect of these interactions are that prey are beneficial for predator populations while predator populations are harmful for prey. Because of the co-dependence of these species, and the asymmetry in the direction of each population’s effect on each other, it is possible for them to be unstable. This instability arises because predation should deplete prey populations, which in turn reduces predator production and abundance, leading to enhanced prey populations. Identifying the ecological conditions under which this process is stable is well suited for ecological modeling. Unlike in real world situations, models can be used to directly measure inherent stability of equilibrium conditions. Further, modeling allows us to sequentially add or remove ecological interactions to models determine whether they stabilize or destabilize predator-prey systems. Here I develop a series of models to evaluate effect of common ecological processes on the stability of predator-prey interactions. Specifically, I develop a simple standard model (the “base” model) that serves as a reference model to judge model stability. I then evaluate the stabilizing effects of density dependence and prey handling time, as well as the interactive effect of the two. I interpret the results of these simple models with respect to real world predator prey systems by extrapolating my understanding of mathematical models to what each implies about actual predator-prey interactions. Methods The base model used is the Lotka-Volterra model (Equation 1). This models predatorprey interactions by simulating prey populations in one equation (f (N(t),P(t))) and predator populations in a second equation (g (N(t),P(t))). The prey population (N) is increased by new births of prey and decreased by prey getting eaten by predators. Parameter a is the per capita reproductive rate of the prey population. Parameter b is the attack rate of predators on prey and is dependent on both prey population size and predator population size (P(t)). The predator population (P) is increased by predators eating prey and converting that energy into new predators and decreased by a constant death rate of predators. Parameter c is a conversion constant that relates consumption of prey to production of new predators. Parameter d is the per 2 Jennifer Gardner Project 2 Fish 454 capita death rate of predators. To further explore stability of predator-prey interactions, different components were added to this base model. Equation 1. Lotka-Volterra Model 𝑓(𝑁(𝑡), 𝑃(𝑡)) = 𝑎𝑁(𝑡) − 𝑏𝑁(𝑡)𝑃(𝑡) 𝑔(𝑁(𝑡), 𝑃(𝑡)) = 𝑏𝑐𝑁(𝑡)𝑃(𝑡) − 𝑑𝑃(𝑡) One component added to the model was density dependence of the prey population. Growth of the prey population was simulated using the logistic growth model. Under this model the population has a carrying capacity (K) that the population size cannot increase beyond (Equation 2). Another component added to the base model was predator handling time, which modeled constraints on the per capita feeding rates of predators on prey. The constraint modeled here was the amount of time it takes predators to subdue and consume prey (h). Predators can feed at a maximum rate, when prey is very abundant, of 1/h based on this model (Equation 3). Finally, the combination of density dependence and predator handling time was explored by adding both components to the base model simultaneously to create the full model (Equation 4). Equation 2. Density Dependence Model 𝑁(𝑡) ) − 𝑏𝑁(𝑡)𝑃(𝑡) 𝐾 𝑔(𝑁(𝑡), 𝑃(𝑡)) = 𝑏𝑐𝑁(𝑡)𝑃(𝑡) − 𝑑𝑃(𝑡) 𝑓(𝑁(𝑡), 𝑃(𝑡)) = 𝑎𝑁(𝑡) (1 − Equation 3. Predator Handling Time Model 𝑏𝑁(𝑡)𝑃(𝑡) 1 + ℎ𝑏𝑁(𝑡) 𝑏𝑐𝑁(𝑡)𝑃(𝑡) 𝑔(𝑁(𝑡), 𝑃(𝑡)) = − 𝑑𝑃(𝑡) 1 + ℎ𝑏𝑁(𝑡) 𝑓(𝑁(𝑡), 𝑃(𝑡)) = 𝑎𝑁(𝑡) − Equation 4. Full Model 𝑓(𝑁(𝑡), 𝑃(𝑡)) = 𝑎𝑁(𝑡) (1 − 𝑔(𝑁(𝑡), 𝑃(𝑡)) = 𝑁(𝑡) 𝑏𝑁(𝑡)𝑃(𝑡) )− 𝐾 1 + ℎ𝑏𝑁(𝑡) 𝑏𝑐𝑁(𝑡)𝑃(𝑡) − 𝑑𝑃(𝑡) 1 + ℎ𝑏𝑁(𝑡) 3 Jennifer Gardner Project 2 Fish 454 Table 1. Parameter values used to simulate model isoclines and trajectories. Parameter values are the same for all four models unless otherwise stated. Parameter a b c d K h Value 5 (t-1) 2 (t-1) 0.3 0.3 (t-1) 5 (individuals/area) 0.05 (t-1) Stability of each model was determined in two ways. The first was to calculate equilibrium expressions for N and P under each model and then to calculate isoclines for each populations. The model trajectory was simulated using the Adams-Bashford method of simulating ordinary differential equations. Simulations were run for specified parameter values (Table 1). Stability was determined based on the model trajectory when both populations were moved away from equilibrium by some amount. The second way stability was analyzed was by deriving each equation with respect to N and P in order to determine a Jacobian matrix. The eigenvalue of the Jacobian matrix was calculated using an eigenvalue calculator written by Tim Essington. The model was determined to be stable if the real portion of the eigenvalue was negative and unstable if the real portion of the eigenvalue was positive. Results Base Model The base model is neutrally stable, meaning it is neither stable nor unstable. The real portion of the eigenvalue is exactly zero (eigenvalue=0±1.225i). This means that the perturbations are neither growing nor shrinking. When the model is moved away from equilibrium it will never return to equilibrium but it will never move further away than the initial perturbation. Instead the model trajectory circles around equilibrium never getting closer or father than the initial perturbation (Figure 1). This trajectory can be explained in the terms of the system being modeled. In the lower right quadrant both populations are increasing because more prey translates to more predators. As the predators become more abundant, the trajectory moves into the upper right quadrant where predators are still increasing but prey are decreasing as a result of too many predators. This decrease in prey eventually causes a decrease in predators 4 Jennifer Gardner Project 2 Fish 454 which in turn results in a subsequent increase in prey due to less predation. This cycle continues to indefinitely under this model. Equilibrium Expression 𝑁∗ = 𝑑 𝑃∗ = 𝑏𝑐 𝑎 𝑏 b a Figure 1. Predator and prey isoclines with plotted model trajectory and vectors when a) tarting point is 10% above equilibrium for both N and P and b) starting point is 50% above equilibrium for both N and P. Jacobian Matrix and Eigenvalue [ 𝑎 − 𝑏𝑃∗ 𝑏𝑐𝑃∗ −𝑏𝑁 ∗ ] 𝑏𝑐𝑁 ∗ − 𝑑 [ 0 −1 ] 1.5 0 Eigenvalue = 0 ± 1.225𝑖 Density Dependent Model The density dependent model imposes a carrying capacity on prey population size. It indirectly imposes density dependence on the predator population as well because predator population size is a function of the prey population size. Under this model the prey population sizes are restricted by both the carrying capacity and predation. This results in the density dependent model being stable and spiraling back toward equilibrium (Figure 2, eigenvalue=-0.25±1.135i). This stability is also reflected by the isoclines. The N isocline has a negative slope (Figure 2). This results in stability because the trajectory reaches the N isocline 5 Jennifer Gardner Project 2 Fish 454 sooner after crossing the P isocline than it did in the simple Lotka-Volterra. This results in the oscillations being dampened and the model returning to equilibrium. Equilibrium Values 𝑁∗ = 𝑑 𝑏𝑐 𝑎 𝑑 𝑃∗ = (1 − ) 𝑏 𝑏𝑐𝐾 Figure 2. Density dependent model predator and prey isoclines with plotted model trajectory when starting point is 20% higher than equilibrium for both N and P. Jacobian Matrix and Eigenvalues 2𝑁 ∗ 𝑎 (1 − 𝐾 ) − 𝑏𝑃 ∗ [ 𝑏𝑐𝑃∗ −𝑏𝑁 ∗ ∗ ] 𝑏𝑐𝑁 − 𝑑 [ −0.5 −1 ] 1.35 0 Eigenvalue = −0.25 ± 1.135𝑖 Predator Handling Time Model The predator handling time model imposes a restriction on predator population size without restricting prey population size in any way. This results in an unstable equilibrium that spirals away from equilibrium (Figure 3, eigenvalue=0.125±1.187i). This instability is reflected by the isoclines. The N-isocline in this model has a positive slope (Figure 3). This causes instability because the model trajectory takes longer to reach the N isocline after the crossing the P isocline than it did in the simple Lotka-Volterra model. This results in the oscillations being amplified and the model spiraling away from equilibrium. 6 Jennifer Gardner Project 2 Fish 454 Equilibrium Values 𝑁∗ = 𝑑 𝑎 𝑎ℎ𝑑 𝑏 𝑏𝑐−𝑑ℎ𝑏 𝑃∗ = + 𝑏𝑐−𝑑ℎ𝑏 Figure 3. Predator handling time model predator and prey isoclines and model trajectory when starting point in 20% above equilibrium for both N and P. Jacobian Matrix and Eigenvalue 𝑏𝑃∗ [ 𝑎 − (1+ℎ𝑏𝑁∗)2 𝑏𝑐𝑃∗ (1+ℎ𝑏𝑁∗ )2 −𝑏𝑁∗ 1+ℎ𝑏𝑁∗ 𝑏𝑐𝑁∗ 1+ℎ𝑏𝑁 ∗ −𝑑 ] [ 0.25 1.425 −1 ] 0 Eigenvalue= 0.125 ± 1.187𝑖 Full Model- Density Dependence and Handling Time The full model can be stable or unstable depending on the set parameter values. When carrying capacity is small the model is highly density dependent. This density dependence results in the model being stable and spiraling back to equilibrium, much like the result seen the in the density dependent only model (Figure 4a, eigenvalue=-0.151±1.119i). When K=5, in this model, the N isocline is negative (Figure 4a). This results in stability due to the same mechanism as the density dependent only model. When carrying is large the model is less density dependent. When the model isn’t very density dependent, the predator population is being restricted without much 7 Jennifer Gardner Project 2 Fish 454 restriction on the prey population. This results in the model being unstable and spiraling away from equilibrium (Figure 4b, eigenvalue=0.0329±1.172i). When K=15 the N isocline is slightly positive (Figure 4b) and this results in instability as seen in the predator handling time only model. Equilibrium Expression 𝑁∗ = 𝑑 𝑃∗ = (1 − 𝑏𝑐−𝑑ℎ𝑏 𝑁∗ 𝑎 ) (𝑏 + 𝑎ℎ𝑁 ∗ ) 𝐾 Figure 4. Full model predator and prey isoclines and model trajectory when starting point is 20% above equilibrium for both N and P and a) K=5 and b) K=15. Jacobian Matrix and Eigenvalues 𝑎 (1 − [ 2𝑁∗ 𝐾 𝑏𝑃∗ ) − (1+ℎ𝑏𝑁∗ )2 𝑏𝑐𝑃∗ (1+ℎ𝑏𝑁∗ )2 − 𝑏𝑁∗ 1+ℎ𝑏𝑁∗ 𝑏𝑐𝑁∗ 1+ℎ𝑏𝑁∗ −𝑑 ] K=5 [ −0.303 −1 ] Eigenvalue = −0.151 ± 1.119𝑖 1.275 0 K=15 [ 0.0658 1.375 −1 ] Eigenvalue= 0.0329 ± 1.172𝑖 0 8 Jennifer Gardner Project 2 Fish 454 Discussion Modeling predator-prey interactions under the simple Lotka-Volterra model reveals that this model is neutrally stable. When it is moved away from equilibrium it will neither move toward nor furhter away from equilibrium. This makes it an ideal base model for determining factors that can influence stability in prey predator systems because the base model is not inherently stable or unstable. Thus if an added factor results in a stable system, the stability can be attributed to that factor alone. In the case of this study, adding density dependence of the prey system stabilized the model while adding predator handling time destabilized the model. When both factors were added together, there was an interactive effect in which it is necessary to know certain parameter values to determine stability of the system. The Lotka-Volterra model on its own is too simple to fully represent a real world system. However, explaining resultant stability or instability due to added elements within the model makes sense within the context of real world systems. Density dependence of the prey population stabilizes the system because it results in predators reaching peak abundance in response to prey peak abundance later than they did in the Lotka-Volterra model. This happens because the prey peak abundance is capped by the carrying capacity in addition to predation. This lag in predator peak abundance results in higher amounts of predation on smaller prey populations than in Lotka-Volterra model. This causes prey populations to get smaller each cycle than they would in the Lotka-Volterra model. This cycle continues until the population returns back to equilibrium. While imposing density dependence on prey results in model stability, imposing a handling time restriction on only predators results in model instability. In the predator handling time model, the predators are restricted in the amount of prey they can eat but the prey are able to grow exponentially. This results in prey being able to grow much faster than predators are able to control, so each cycle the prey population gets larger, and thus the predator population gets larger the next cycle. This is an unstable equilibrium where both populations grow continuously away from equilibrium when initially nudged away. Of the models explored here, the full model, considering both density dependence of prey populations and predator handling time, is the most like a real world system. In the real world, populations are density dependent and predators are not able to instantaneously eat prey and convert it in to new predators. Because this model is the most realistic, the results of this model 9 Jennifer Gardner Project 2 Fish 454 are the most applicable to actual predator-prey interactions. This model shows an interactive effect of density dependence and prey handling time on stability. When density dependence in the system is high, the model is stable because the density dependent aspect drives the population trajectory more than the predator handling aspect. The reverse is true if density dependence is low. In this case, predator handling time becomes the driving factor behind population trajectory and the model is unstable. This leads to the conclusion that predator-prey interactions in the real world are neither inherently stable nor unstable. Instead, stability within the system is driven by the unique aspects of that system. Thus, based on this analysis, each predator-prey interaction must be considered individually to determine if the system will tend toward or away from equilibrium. This analysis, while resulting in interesting and important conclusions, is limited in a number of ways. Firstly, only two factors were added to the model to help it simulate real world interactions more closely. In real world systems there are many more factors to be considered. Those factors include, but are not limited to: competition within and between species in the system, environmental effects on population sizes, external causes of prey mortality beyond just predation, and threshold abundance of prey required for predators to reproduce. This model is also limited because only two state variables are included, the prey population and the predator population. In reality many more state variables would likely come in to consideration. For example, prey abundance is dependent on the food source of prey populations as well as the elements described in the model. Additionally, in many systems, predators have more than just one prey species. It is also possible for a prey species to be predated upon my many different predator species. This analysis also does not cover other trophic level interactions, such as the fact that the prey population could be predators on a different species or that the predator population could be prey to another species. However, in this analysis only considering prey and predator populations was appropriate in order to draw broad conclusions about predator-prey interactions. If an individual system were being analyzed though, more state variables would most likely be necessary. This model also lacks detailed description of the prey and predator populations, such as age or stage class structuring. In reality this structuring would be an important part of the system. For example, older predators are probably able to capture prey more efficiently than younger 10 Jennifer Gardner Project 2 Fish 454 predators because of experience. Predation rate across the predator population is probably not equal in a real world scenario. Additionally, loss of a reproductively mature individual from the prey population would probably have a larger effect on the reproductive success of prey than loss of a juvenile. Again, not considering these details was appropriate for this analysis because the aim was to draw broad conclusions about predator-prey interactions. The details of age or stage class structure will vary from system to system and need to be considered on that basis, not a general one. Even with the many model limitations, this analysis still shows some robust conclusions. The main conclusion is that there is not necessarily inherent stability or instability in predatorprey interactions. Instead, there is an interactive effect of all the different elements of the system and the overall stability of the system is dependent on specific aspects of that system. In this case, it was seen that stability was dependent on the carrying capacity. This conclusion itself may not be true for every system. The conclusion of interactive effects that depend on parameters however, is robust and probably holds for most, if not all, systems. In this analysis, only two elements were added to the base model, and these two elements produced a parameter dependent interactive effect. In a real world system there would likely be more elements than just the two considered here. Addition of more elements will most probably result in more complicated interactive effects. Thus it stands to reason that real world systems have many elements interacting and driving stability or instability. These effects could be different than was seen in our model because the added elements will likely interact in new ways. The analysis done here does provide a jumping off point for analyzing stability in real world systems. Just based on this model, the hypothesis stands that carrying capacity dictates density dependence. When looking at real world systems, under this hypothesis, it would follow that highly density dependent predator-prey systems would be more stable than systems with less density dependence. This study also isolates other parameters, such as prey handling time, that could be looked at to help explain stability or instability of a system. This study demonstrates how creating models can be a beneficial first step in understanding ecological interactions in real world systems. By making simplifying assumptions, models can help show basic interactions that are often difficult of see in real world systems with many complicated factors. Additionally, this study shows how a base model can be used to begin 11 Jennifer Gardner Project 2 Fish 454 looking at systems, then adapted by adding elements to make the base model more like real world situations. While this analysis was performed for predator-prey interactions, a similar process could be done with any different type of ecological system. 12