Online Appendix As discussed above, we might be concerned that
advertisement

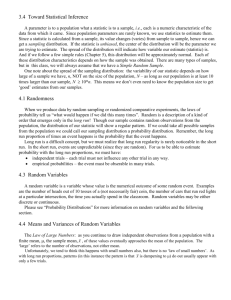
Online Appendix As discussed above, we might be concerned that the conclusions of the analysis are somehow affected by choices about how to deal with sample coverage. Figures 2a and 2b illustrate the distributions of the t-statistics under alternative strategies for restricting the estimates in the sensitivity analysis, using the Polity scaled measure. The solid blue line (“N 80+”) is the distribution from the basic analysis. The dotted red line shows the distribution if we include models that have less than 80 observations (“All estimates”), the dotted green line shows only models with more than 100 observations (“N 100+”), and the dotted yellow line shows only models with more than 120 observations (“N 120+”). The distributions do not change appreciably for most variables. The “All estimates” distributions are slightly different for the sec.pupils, prim.pupils, physicians and beds variables, because these measures have poor coverage, but the substantive conclusion does not change. When we further restrict the densities to models with a high number of observations, more than 100 or 120, the relationship between democracy and secondary enrollment rates (sec.enroll) appears more positive, but many of the other variables fare worse— the primary completion rate (prim.comp), water access (water), sanitation access (sanitation), physicians (physicians), the infant mortality rate (infmort), the death rate (death), and life expectancy (lifeexpect). For these seven variables, the estimates prove less likely to be significant in the expected direction. This gives further reason to doubt the presence of a democratic advantage. Figure 2a: Sensitivity to Sample Coverage Approaches – Education Outcomes (Polity) −2 0 2 −2 0 2 Density 4 t statistic t statistic Pupil Teacher Ratio Secondary (−) (sec.pupils) Pupil Teacher Ratio Primary (−) (prim.pupils) Density t=−1.64 −4 −2 0 t statistic 2 4 t=1.64 −4 −2 0 2 4 t statistic All estimates N 80+ N 100+ N 120+ 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.0 0.1 0.2 0.3 0.4 0.5 0.6 All estimates N 80+ N 100+ N 120+ All estimates N 80+ N 100+ N 120+ 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density t=1.64 −4 4 Completion Rate Primary (+) (prim.comp) All estimates N 80+ N 100+ N 120+ 0.0 0.1 0.2 0.3 0.4 0.5 0.6 t=1.64 −4 Density Enrollment Rate Secondary (+) (sec.enroll) All estimates N 80+ N 100+ N 120+ 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density Enrollment Rate Primary (+) (prim.enroll) t=−1.64 −4 −2 0 2 4 t statistic Note: Figure summarizes distribution of estimated t-statistics from cross-section global sensitivity analysis for five education public good measures from 1975-2009, using the Polity measure of democracy. The straight dotted line represents the threshold necessary to reject the null of no effect at the .05 level with a one-sided test. The figure illustrates the robustness of the findings across different sample coverage approaches. All models employ OLS with robust standard errors. The predicted sign of the democratic advantage hypothesis is shown in parenthesis. Figure 2b: Sensitivity to Sample Coverage Approaches – Health Outcomes (Polity) 0 2 2 Density −4 4 −2 0 t statistic DPT Immunization (+) (dpt.im) Physicians (+) (physicians) Beds (+) (beds) −2 0 2 −4 4 Density t=1.64 −2 0 2 −2 0 2 t statistic t statistic t statistic Infant Mortality Rate (−) (infmort) Death Rate (−) (death) Life Expectancy (+) (lifeexpect) −2 0 t statistic 2 4 Density t=−1.64 −4 −2 0 t statistic 2 4 4 All estimates N 80+ N 100+ N 120+ 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density t=−1.64 All estimates N 80+ N 100+ N 120+ 4 t=1.64 −4 4 2 All estimates N 80+ N 100+ N 120+ 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density 0.0 0.1 0.2 0.3 0.4 0.5 0.6 All estimates N 80+ N 100+ N 120+ 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0 t=1.64 t statistic All estimates N 80+ N 100+ N 120+ −4 −2 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density −4 4 t=1.64 −4 t=1.64 All estimates N 80+ N 100+ N 120+ t statistic All estimates N 80+ N 100+ N 120+ 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density −2 Measles Immunization (+) (measles.im) All estimates N 80+ N 100+ N 120+ 0.0 0.1 0.2 0.3 0.4 0.5 0.6 t=1.64 −4 Density Sanitation Access (+) (sanitation) All estimates N 80+ N 100+ N 120+ 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density Water Access (+) (water) t=1.64 −4 −2 0 2 4 t statistic Note: Figure summarizes distribution of estimated t-statistics from cross-section global sensitivity analysis for nine health public good measures from 1975-2009, using the Polity measure of democracy. The straight dotted line represents the threshold necessary to reject the null of no effect at the .05 level with a one-sided test. The figure illustrates the robustness of the findings across different sample coverage approaches. All models employ OLS with robust standard errors. The predicted sign of the democratic advantage hypothesis is shown in parenthesis. Increasingly, analysts are employing imputation procedures to deal with the missing data problem. Instead of restricting the pool of estimates based on sample coverage, an alternative approach is to impute the missing data and rerun the analysis on the imputed dataset. In line with the recommendations of Honaker, King, and Blackwell (2011), I run an imputation model using the Amelia II R package that accounts for the time series properties of the data. All dependent and independent variables included in the analysis were included in the imputation model. In addition, the imputation model includes polynomials of time (k=2) that are allowed to interact with country fixed effects, which allows the temporal patterns in the data to vary across the different crosssectional units.1 The results of this exercise are shown in Figures 3a and 3b, which compare the results using the Polity variable (with no lags) with listwise deletion (the standard approach in this literature) and imputation. We can see that using imputed data does not appreciably change the results; the distributions tightly overlap across the two approaches. The evidence in favor of the “democratic advantage” does improve slightly for some variables— notably prim.enroll, sec.enroll, water, sanitation, and lifeexpectancy— but gets worse for others – like sec.pupils, prim.pupils, death, and physicians. Overall, the distributions of the estimates do not seem sensitive to the different missing data approaches. Because of the time intensity of running the sensitivity analysis (the code takes more than one week to run), the analysis here relies on a single imputation (m=1) rather than multiple imputations (generally m=5). Note that this practice effectively overstates the certainty in the estimates, which will make us more likely to find significant results. 1 Figure 3a: Sensitivity to Listwise Deletion or Imputation – Education Outcomes (Polity) −2 0 2 −2 0 2 Density 4 t statistic t statistic Pupil Teacher Ratio Secondary (−) (sec.pupils) Pupil Teacher Ratio Primary (−) (prim.pupils) Density t=−1.64 −4 −2 0 t statistic 2 4 t=1.64 −4 −2 0 2 4 t statistic Imputation Listwise Deletion 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Imputation Listwise Deletion Imputation Listwise Deletion 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density t=1.64 −4 4 Completion Rate Primary (+) (prim.comp) Imputation Listwise Deletion 0.0 0.1 0.2 0.3 0.4 0.5 0.6 t=1.64 −4 Density Enrollment Rate Secondary (+) (sec.enroll) Imputation Listwise Deletion 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density Enrollment Rate Primary (+) (prim.enroll) t=−1.64 −4 −2 0 2 4 t statistic Note: Figure summarizes distribution of estimated t-statistics from cross-section global sensitivity analysis for five education public good measures from 1975-2009, using the Polity measure of democracy. The straight dotted line represents the threshold necessary to reject the null of no effect at the .05 level with a one-sided test. All models employ OLS with robust standard errors. The predicted sign of the democratic advantage hypothesis is shown in parenthesis. Figure 3b: Sensitivity to Listwise Deletion or Imputation – Health Outcomes (Polity) 0 2 2 Density −4 4 −2 0 2 t statistic DPT Immunization (+) (dpt.im) Physicians (+) (physicians) Beds (+) (beds) −2 0 2 −4 4 Density t=1.64 −2 0 2 t=1.64 −4 4 −2 0 2 t statistic t statistic Infant Mortality Rate (−) (infmort) Death Rate (−) (death) Life Expectancy (+) (lifeexpect) −2 2 4 Density t=−1.64 −4 −2 0 t statistic 2 4 4 Imputation Listwise Deletion 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density 0 t statistic 0.0 0.1 0.2 0.3 0.4 0.5 0.6 t=−1.64 Imputation Listwise Deletion 4 Imputation Listwise Deletion 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Imputation Listwise Deletion t statistic Imputation Listwise Deletion 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0 t=1.64 t statistic t=1.64 −4 −2 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density −4 4 Imputation Listwise Deletion −4 t=1.64 Imputation Listwise Deletion t statistic 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density −2 Measles Immunization (+) (measles.im) Imputation Listwise Deletion 0.0 0.1 0.2 0.3 0.4 0.5 0.6 t=1.64 −4 Density Sanitation Access (+) (sanitation) Imputation Listwise Deletion 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density Water Access (+) (water) t=1.64 −4 −2 0 2 4 t statistic Note: Figure summarizes distribution of estimated t-statistics from cross-section global sensitivity analysis for nine health public good measures from 1975-2009, using the Polity measure of democracy. The straight dotted line represents the threshold necessary to reject the null of no effect at the .05 level with a one-sided test. All models employ OLS with robust standard errors. The predicted sign of the democratic advantage hypothesis is shown in parenthesis. Figures 4a and 4b show the “sensitivity of the sensitivity analysis” to the use of different binary democracy indicators, specifically the measures developed by Cheibub, Gandhi and Vreeland (2011) and Geddes, Wright, and Franz (2012). Interested readers are encouraged to read the GWF codebook (http://sites.psu.edu/dictators/wp-content/uploads/sites/12570/2014/06/GWF- Codebook.pdf) to understand the sources of various discrepancies between the two. In total, about 300 country-year observations are coded differently between the two datasets in the analysis period for this paper. It turns out that the non-relationship between regime type and public good provision does not appear to be the result of reliance on the GWF data. Figures 4a and 4b show the distributions of t-statistics (only the contemporaneous models) across the GWF and CGV measures. There are very few noticeable differences. The CGV distributions appear slightly more favorable to the “democratic advantage” hypothesis, but they still tend to be centered at zero (or on the wrong side of zero). Figure 4a: Comparison of CGV and GWF – Education Outcomes −2 0 2 −2 0 2 Density 4 t statistic t statistic Pupil Teacher Ratio Secondary (−) (sec.pupils) Pupil Teacher Ratio Primary (−) (prim.pupils) Density t=−1.64 −4 −2 0 t statistic 2 4 t=1.64 −4 −2 0 2 4 t statistic CGV GWF 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.0 0.1 0.2 0.3 0.4 0.5 0.6 CGV GWF CGV GWF 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density t=1.64 −4 4 Completion Rate Primary (+) (prim.comp) CGV GWF 0.0 0.1 0.2 0.3 0.4 0.5 0.6 t=1.64 −4 Density Enrollment Rate Secondary (+) (sec.enroll) CGV GWF 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density Enrollment Rate Primary (+) (prim.enroll) t=−1.64 −4 −2 0 2 4 t statistic Note: Figure summarizes distribution of estimated t-statistics from cross-section global sensitivity analysis for five education public good measures from 1975-2009, comparing the GWF and CGV measures of democracy. Only estimates from the contemporaneous model are shown. The straight dotted line represents the threshold necessary to reject the null of no effect at the .05 level with a one-sided test. All models employ OLS with robust standard errors. The predicted sign of the democratic advantage hypothesis is shown in parenthesis. Figure 4b: Comparison of CGV and GWF – Health Outcomes 0 2 2 Density −4 4 −2 0 t statistic DPT Immunization (+) (dpt.im) Physicians (+) (physicians) Beds (+) (beds) −2 0 2 −4 4 Density t=1.64 −2 0 2 t=1.64 −4 4 −2 0 2 t statistic t statistic Infant Mortality Rate (−) (infmort) Death Rate (−) (death) Life Expectancy (+) (lifeexpect) −2 2 4 Density t=−1.64 −4 −2 0 t statistic 2 4 4 CGV GWF 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density 0 t statistic 0.0 0.1 0.2 0.3 0.4 0.5 0.6 t=−1.64 CGV GWF 4 CGV GWF 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density 0.0 0.1 0.2 0.3 0.4 0.5 0.6 CGV GWF 2 t statistic CGV GWF 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0 t=1.64 t statistic t=1.64 −4 −2 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density −4 4 CGV GWF −4 t=1.64 CGV GWF t statistic 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density −2 Measles Immunization (+) (measles.im) CGV GWF 0.0 0.1 0.2 0.3 0.4 0.5 0.6 t=1.64 −4 Density Sanitation Access (+) (sanitation) CGV GWF 0.0 0.1 0.2 0.3 0.4 0.5 0.6 Density Water Access (+) (water) t=1.64 −4 −2 0 2 4 t statistic Note: Figure summarizes distribution of estimated t-statistics from cross-section global sensitivity analysis for nine health public good measures from 1975-2009, comparing the GWF and CGV measures of democracy. Only estimates from the contemporaneous model are shown. The straight dotted line represents the threshold necessary to reject the null of no effect at the .05 level with a one-sided test. All models employ OLS with robust standard errors. The predicted sign of the democratic advantage hypothesis is shown in parenthesis.