We developed a new Waveform Processing Library (WPlib) that can
 that can")
New Waveform Processing Library (WPlib)
K. Solanki & TOT
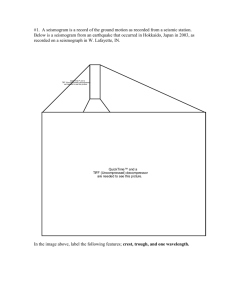
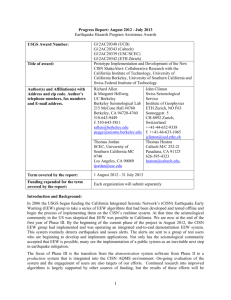
We developed a new Waveform Processing Library (WPlib) that can be used by all three algorithms. The old framework used GCDA (Generic Continuous Data Area) to store waveforms which slowed down the read/write access to the waveforms and overall processing thread. To avoid that problem the new WPlib uses internal memory buffers and works in a single process multi-threaded environment.
Keeping in mind that the waveform processing requirements for ElarmS and VS are small (On-site was already using WPlib in the past), a complete general purpose framework was not required. The new
Waveform Processing library was implemented to specifically fulfill the needs of Elarms and VS. It provides the following functions:
Import waveforms from Multicast Network or Earthworm
Create waveform buffers
Read/Write waveforms to the buffers
Calls to plug-in waveform processing modules
Start / Stop the processing
Diagram of new Waveform Processing library (WPlib).
10
On-site Algorithm
M. Böse, K. Solanki, E. Hauksson, T. Heaton
We continued operation and performance monitoring of the Tauc-Pd-On-site algorithm at Caltech, UC
Berkeley and USGS Menlo Park and performed minor bug fixes. During the past 12 month we obtained
704 correct reports of ~150 local earthquakes with M4+. During the same time period, the algorithm produced 6 false alerts (M est
>6.0); 5 of them were caused by problems with strong-motion sensors at NC stations. We have started sending On-site reports to DM in April 2011.
We implemented a simple associator of station reports based on constraints in time, space and magnitude. As soon as two or more reports are associated with each other, we start calculating and reporting median values for magnitudes etc.. From real-time and off-line testing (using data from
California, Taiwan and Japan) we determined uncertainties for σ
M,
σ lat
, σ lon
and σ log(PGV)
and report them to DM.
We started assigning likelihood values to the On-site reports which quantify the probability of correct/false alert. The likelihood values depend on the number of reporting stations and the time in between these reports. In the case of only one reporting station, we currently set the likelihood parameter to lh=0.8. The value decreases automatically every second if no further report is received.
After 5 seconds the likelihood drops to zero. If lh=0 and M est
>M5.0, On-site sends a “DELETE/CANCEL” message to the CISN ShakeAlert Decision Module (DM), where the corresponding event is deleted and a
“CANCEL” message forwarded to the UD to notify users that the event was a false alert. If the first report is confirmed by one or more stations, we set lh=1.0.
We have also developed a new algorithm for On-site warning that uses the acceleration, velocity and displacement waveforms from a single three-component broadband (BB) or strong-motion (SM) sensor to perform real-time earthquake/noise discrimination and near/far source classification (Böse et al.,
2011). When an earthquake is detected, the algorithm estimates the moment magnitude M, epicentral distance Δ, and peak ground velocity (PGV) at the site of observation. The algorithm was constructed by using an Artificial Neural Network approach. Our training and test datasets consisted of 2,431 threecomponent SM and BB records of 161 crustal earthquakes in California, Japan and Taiwan with 3.1 ≤ M ≤
7.6 at Δ ≤115 km. First estimates become available at 0.25 seconds after the P-pick and are regularly updated with progressing time. We find that the prediction errors of this new approach are around 60% smaller than if we use the Tauc-Pd-On-site algorithm.
References
Böse, M., Heaton, T. H. and Hauksson, E., 2011: Rapid Estimation of Earthquake Source and Ground-Motion
Parameters for Earthquake Early Warning Using Data from Single Three-Component Broadband or Strong-Motion
Sensor, to be subm. to BSSA.
11
ElarmS Algorithm
H. Brown, I. Lim, R.M. Allen, D. Neuhauser, M. Hellweg, O. Khainovski
We continued operating and monitoring the ElarmS first-generation algorithm. Waveform processing is operational at UC Berkeley, Caltech, and USGS Menlo Park, and a single state-wide event detection algorithm operates at UC Berkeley. In March 2011 ElarmS began sending event messages to the Decision
Module, for events in the greater San Francisco Bay Area and Central Coast. The ElarmS message criteria requires the following event attributes before sending a message to the Decision Module:
Magnitude 2.0 or greater
Epicenter within the Central Coast Region (Latitude 35-40, West of the Central Valley)
In the SF Bay Area, at least 4 stations within 35km of the event epicenter. Otherwise, at least 5 stations within 100km of the event epicenter
Between March 17 th and May 21 st , ElarmS submitted messages for 31 events in this region. Of these, 28 were real events and 3 were false. The event magnitudes ranged from 2.0 to 4.3.
We developed a second generation ElarmS algorithm, based in C++ for speed and adaptability. ElarmS-2 utilizes the established location and magnitude relations, but has an updated method of associating triggers together to form events. To declare a new event, ElarmS-2 currently requires the following criteria be met:
50% of stations within triggering distance of the estimated epicenter must have triggered
Triggers must be within a time/space window based on P-wave travel times
TauPmax and Pd must be above minimum threshold values
ElarmS-2 has been processing real-time data in test mode since December 2010. During the period from
December 10 th , 2010 to March 31 st , 2011, ElarmS-2 successfully detected 16 out of 17 M4+ events in
California. ElarmS-2 is not yet sending messages to the Decision Module. We are currently monitoring the system and making adjustments as necessary. When the system has been rigorously tested, we will connect ElarmS-2 to the Decision Module and discontinue operation of ElarmS-1 (fall 2011).
Part of the ElarmS-2 effort was development of a new waveform processing package (WP2) that incorporates the new waveform processing library. WP2 development is not complete (due to the loss of our programmer), but we hope to have it completed in the next few months (now that our new programmer has started).
We developed a KML-based method of visually inspecting and assessing system performance. The analysis algorithm automatically evaluates station latencies, promptness of alerts, accuracy of magnitude/location/ground-shaking estimates, and number of successful event detections, false alarms, and missed events. This information is displayed in Google Earth.
References
Brown, H.M., R.M. Allen, M. Hellweg, O. Khainovski, D. Neuhauser, A. Souf, Development of the ElarmS methodology for earthquake early warning: Realtime application in California and offline testing in Japan.
Soil Dyn. Earthquake Eng. 31, 188-200, doi:10.1016/j.soildyn.2010.03.008, 2011.
Brown, H.M., I. Lim, R.M. Allen, D. Neuhauser, O. Khainovski, M. Hellweg, CISN Earthquake Early Warning: ElarmS,
Abstract NH33A-1372 presented at 2010 Fall Meeting, AGU, San Francisco, Calif., December 2010.
Lim, I., R.M. Allen, H.M. Brown, M. Hellweg, D.S. Neuhauser, O. Khainovski, Earthquake Early Warning: Tools for
System Assessment, Abstract NH33A-1373 presented at 2010 Fall Meeting, AGU, San Francisco, Calif.,
December 2010.
12
Virtual Seismologist (VS) Algorithm
G. Cua, M. Fischer, M. Caprio, T. Heaton
The operational version of the VS algorithm (requiring a minimum of 4 stations) continues to run in a stable and consistent manner at 3 separate installations in Berkeley, Menlo Park, and SCSN. In 2010, VS correctly detected more than 3100 events statewide, 469 of which were M>3.0 events. VS activity in
2010 was dominated by aftershocks of the M7.2 Sierra El Mayor event. With the current requirement of
4 stations, the average time to the first VS estimate (statewide) is 21 seconds, with a mean of 7 seconds.
Since the stable operation of the Decision Module (DM) in mid-March 2010, VS contributed to 611 correct DM event declarations, 30 of which were from M>3.0 events.
We have begun a two-phase effort to integrate the 3 separate VS installations into a statewide VS installation (for redundancy, intended to run at both Berkeley and
SCSN). The first phase (on-going) will be to combine the Berkeley and
Menlo Park installations into a single northern California installation. This should improve VS detection capabilities in northern California.
Development and testing of an integrated northern California installation will be completed in the next weeks. The second phase will be to combine the northern and southern California installations into a statewide installation. We expect full VS integration to be completed in
Year 3.
VS reports to the DM assign likelihood values that reflect probabilities of false alarms. There are currently 3 possible values: lh=1.0 , 0.5, and 0.1. These are based on whether the distribution of picked stations and the average of station-specific magnitude estimates are consistent with the VS magnitude and location estimates. Time-dependent magnitude and location uncertainty estimates are forthcoming.
References
Cua, G., Fischer, M., Caprio, M., Heaton, T., Clinton, J., and the CISN Earthquake Early Warning Project Team
(2010), CISN Shake Alert: Faster Alert Information through Multiple Threshold Event Detection in the Virtual
Seismologist Earthquake Early Warning Algorithm, American Geophysical Union, Fall Meeting 2010, abstract #
NH33A-1371.
13
CISN ShakeAlert Decision Module (DM)
D. Neuhauser, I. Henson, O. Kainovski, R.M. Allen, M. Böse, G. Cua, T. Heaton
ShakeAlert encompasses several independent earthquake early warning systems (ElarmS,
Virtual Seismologist, Onsite). The Decision Module (DM) combines earthquake information feeds from these algorithms to provide a unified “ShakeAlert” view of earthquakes in progress. The DM published this information in an xml-formatted message (purple box) for use by any number of users, including the
User Display application. The DM has been operational since February 2011.
The Decision Module uses Java-based ActiveMQ Messaging Broker with C++ Messaging Service extension. Using the xml-format, DM receives messages from ElarmS, OnSite, or Virtual Seismologist systems. Once DM is informed of a possible earthquake, DM tries to associate the event message with any current event messages that it has stored using a location and time metric. If DM cannot associate the message, it assumes that the newly received message is describing a new earthquake in progress and publishes the earthquake. If DM does manage to associate the message with another earthquake in its memory, it updates the earthquake parameters and republishes the earthquake message.
Earthquake source parameters from different algorithms are currently combined using a weighted average based on parameter uncertainties. The in the future it is intended to include other types of information including prior information using a Bayesian scheme.
Figure. Flow chart for the DM logic and example output message.
References
Neuhauser, D.S.; O. Khainovsky; M. Böse; K. Solanki; G. B. Cua; T. H. Heaton; R. M. Allen. CISN ShakeAlert: The
Decision Module for Earthquake Alerts. AGU Fall Meeting, NH33A-1370. San Francisco, December 2010.
14
CISN ShakeAlert User Display (UD)
K. Solanki, M. Böse, D. Neuhauser, M. Fischer, T. Heaton, E. Hauksson & SOT
The User Display (UD) receives xml-messages from the Decision Module (DM) and displays their content in a simple and easily understandable way. The app is written in Java and is thus platform-independent.
The current version 1.5 was released by end of April 2011 and has the following features:
Calculation and display of remaining warning time for a given user
Calculation and display of expected MMI intensity at this site (the user can select between 2 attenuation relations and specify a Vs30 value for site characterization if desired)
Description of expected MMI intensity at user site (e.g., “Moderate Shaking expected”)
Display of estimated magnitude
Calculation and display of P/S-wavefronts
Display of user site
Display of MMI intensity map for rock condition
Display of a 30-radius blind-zone around the user for education purpose
Siren and audio announcement
The UD pops up automatically once a DM message is received. The user can set thresholds for intensities, magnitudes and likelihood values to reduce the number of reports.
Alike CISN Display UD uses Openmap. Multiple map layers showing, e.g., fault lines or infrastucture can be added. Xml-messages received by the UD are stored in a history folder and can be replayed. A log-file summarizes the key information for each received DM report. Network Time Protocol (NTP) is used for time synchronization. Version 1.5 requires a user-ID and password for authentication. Version 1.6 will be capable to receive and display heartbeats from the algorithms and DM to ensure robust communication.
Screenshot of the User Display showing the simulation of the 1994 M6.7 Northridge earthquake.
References
Böse, M.; Solanki, K.; Allen, R. M.; Brown, H.; Cua, G. B.; Given, D.; Hauksson, E.; Heaton, T. H.;
The CISN Earthquake Early Warning Project Team, 2010: CISN ShakeAlert: Development of a Prototype User
Display for Providing Earthquake Alerts to End Users, American Geophysical Union, Fall Meeting 2010, abstract
#NH33A-1369.
15
CISN Testing Center (CTC) Software
P. Maechling, M. Liukis, T. Jordan and SOT and TOT
CISN Testing Center (CTC) is designed to provide automated and interactive performance evaluations of
ShakeAlert forecasts. The CTC software consists of two main parts: (1) software programs that input
ShakeAlert EEW reports, match ShakeAlert forecasts to observational data, and generate a variety of
EEW system performance summaries, and (2) an automated testing framework that can input
ShakeAlert EEW performance reports, retrieve ANSS observational data, and produce performance summaries on a daily, or event, basis.
The CTC software is designed to support both interactive and automated processing. Existing EEW performance reports can be interactively processed for analysis, and the CTC software can also be used by the automated testing web site. The interactive capabilities of the CTC software may be useful for offline testing of ShakeAlert system and the open-source software is available for download from SCEC.
The CTC software currently imports CIT OnSite algorithm format EEW reports and ETH Virtual
Seismologists algorithm format EEW reports. Importing of ShakeAlert format EEW reports is under development. Importing of ElarmS algorithm format EEW reports can be implemented if useful.
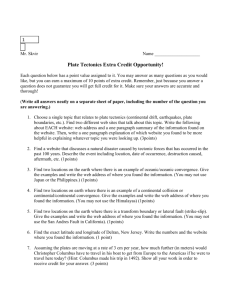
The CTC software implements a number of standard EEW performance summary metrics that can be categorized into event specific forecasts (e.g. final magnitude forecast), site specific forecast (e.g. peak velocity at site of seismic station), and catalog summaries showing EEW system performance for a catalog of interest.
CTC performance summaries for CIT OnSite and ETH Virtual Seismologists EEW reports. (Left) Map showing location of six recent events that triggered CISN EEW reports. (Center) Catalog event summary comparing observed final magnitude to forecast magnitudes. (Right) Catalog site summary comparing observed peak velocities to forecast peak velocities.
The CTC group has implemented an automated testing web site based on Collaboratory for the Study of
Earthquake Predictability (CSEP) software. The CSEP framework has been extended to support automated retrieval of ANSS and ShakeMap observational data which will be used in the automated testing when CISN ShakeAlert system begins distribution of ShakeAlert EEW reports to the testing center.
16
Multiple Threshold Event Detection (VS-MTED) and other methodology developments for the Virtual Seismologist algorithm
G. Cua, M. Fischer, M. Caprio, M.-A. Meier, T. Heaton
The goal of VS multiple threshold event detection (VS-MTED) is to increase the available warning time for subscribers who have higher tolerance for false alarms, while not compromising the needs of subscribers who have stricter requirements for false alarms. VS-MTED features 5 different threshold levels specified in terms of amplitude threshold and minimum number of stations required to initiate an event declaration. Level 5 is roughly equivalent to the operational VS version currently feeding into the
Decision Module (with a minimum of 4 stations), while Level 1 allows for event declarations based on single station data if amplitudes are high enough, and produces 2- and 3-station estimates if picks of high enough quality become available. A single-station VS-MTED declaration evolves into a “standard”
VS event once enough data is available. VS-MTED real-time codes have been developed, and were tested in real-time from August 2010 until February 2011. (We then noticed that the VS-MTED installation was slowing down the operational VS version feeding into the Decision Module, and have since turned off the VS-MTED installation.) Optimal use of VS-MTED information would require real-time characterization of probabilities of false alarms.
Planned VS research developments include: 1) improving robustness of estimates with less than 4 stations (Levels 1-4 in VS-MTED), 2) characterizing probabilities of false alarms, and magnitude and location uncertainties as a function of time, 3) systematic evaluation of information for potential use of
Bayesian prior information (fault traces, long term hazard maps, previously observed seismicity, stationdependent data latency characteristics), and optimizing how such information can be used in real-time, and 4) improving VS magnitude estimation by accounting for site amplification effects.
17
Application of real-time GPS to early warning
R.M. Allen, A. Ziv
As part of the ongoing methodological development, we have been investigating the use of realtime GPS displacement data streams for rapid detection and source parameter estimation. This effort focused on the April 4, 2010, M w
7.2 El Mayor-Cucapah earthquake for which real-time GPS and seismic data is available.
We have developed a simple algorithm to extract the permanent displacement at GPS sites starting one oscillation after triggering on the dynamic long period signal. The estimate is continually improved with time. These permanent displacements can then be inverted for source characteristics given an approximate estimate of the fault plane. Estimates of fault plane parameters are available from existing fault catalogs and the appropriate fault could be selected based on the seismic epicenter.
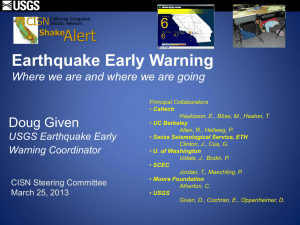
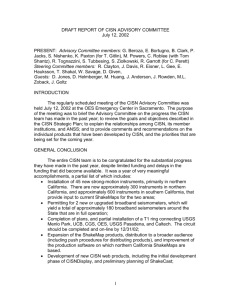
The results of application to the El Mayor-Cucapah earthquake are shown in the figure. The first magnitude estimate when data from the closest GPS station is available is M6.9. The GPS-based magnitude estimate ranges from 6.8 to 7.0, and the permanent displacement data is available around the time of the peak shaking at the same site. The results of applying the ElarmS algorithm to the same earthquake are also shown in the figure. The seismically based magnitude estimate is almost as accurate and available earlier as it only requires a few seconds of P-wave data.
We conclude that real-time GPS would provide a valuable contribution of earthquake early warning systems. The approach provides an independent estimate of magnitude which it particularly important for the largest events. It is also possible to extract a magnitude estimate within a timeframe relevant for warnings as it would contribute to the warnings at more distance sites. Further development of the use of real-time GPS is clearly warranted.
Figure. Timeline showing when GPS and seismically derived information is available.
The top panel shows a time-distance plot indicating when the P-wave based seismic
(red) and GPS (green) information is available (trigger: open squares, magnitude information available: solid squares). The time of peak acceleration and peak velocity on all three components is also shown (blue) as an indication of when damage would be expected to occur. The 2 nd panel shows the number of stations providing information for the seismic (red) and GPS (green) derived magnitude estimate which is shown in the
3 rd panel. Grey line is the correct magnitude of M w
7.2.
References
Allen, R. M., A. Ziv, On the potential implementation of real-time GPS in earthquake early warning systems: The
Mw 7.2 El Mayor-Cucapah earthquake test case. Geophys. Res. Lett. In review. (Preprints available on request.)
18
Finite Fault Detector
M. Böse, T. Heaton , K. Solanki, E. Hauksson
Predicting the shaking from large earthquakes requires some estimate of the likelihood of the future evolution of an ongoing rupture. It seems reasonable to assume that large slip amplitudes increase the probability for evolving into a large earthquake. From simulated suites of 1-D rupture series from stochastic models of spatially heterogeneous slip, we found that while large slip amplitudes increase the probability for the continuation of a rupture and the possible evolution into a Big One, the recognition that rupture is occurring on a spatially smooth fault, such as the San Andreas Fault, has an even stronger effect (Böse and Heaton, 2010). We conclude that an EEW system for large earthquakes needs some mechanism for the rapid recognition of the causative fault (e.g., from real-time GPS measurements) and consideration of its smoothness.
We have started to implement and test a Finite Fault Detector for the San Andreas and San Jacinto
Faults using a rapid near/far source classification using real-time seismic data from the CISN (Yamada et
al., 2007).
Demonstration of a Finite Fault Detector for the Great Southern California ShakeOut scenario earthquake.
References
Böse, M. and T.H. Heaton, 2010: Probabilistic Prediction of Rupture Length, Slip and Seismic Ground Motions for an Ongoing Rupture: implications for Early Warning for Large Earthquakes, Geophysical Journal
International, 183(2), pp. 1014-1030, doi:10.1111/j.1365-246X.2010.04774.x.
Yamada, M., T. Heaton, and J. Beck, 2007, Early Warning Systems for Large Earthquakes: Near-Source versus Far-
Source Classification, Bull. Seism. Soc. Am., 97, 1890-1910.
19