Guild_Modelling_2013..
advertisement

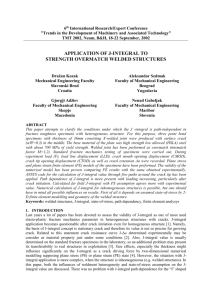
Modelling the Toughness of Rubber-Toughened Epoxies: A Critical Distance Criterion F.J. Guild, D. Alvarez, A.J. Kinloch and A.C. Taylor Imperial College London London SW7 2AZ, UK F.Guild@imperial.ac.uk Introduction The high values of toughness for rubbertoughened epoxies and other filled adhesives arise from many different failure mechanisms occurring during crack growth in these materials which all combine to absorb energy and increase toughness. Modelling the toughness of such materials must attempt to include all the mechanisms involved. We have now developed a model for toughness which has been successfully applied to two different rubber-filled epoxy adhesives. The model includes the growth of the crack radius which has been observed experimentally, followed by simulations of the crack at the point of fracture using a modified J-integral approach. The energy arising from cavitation of the particles around the crack is taken into account. b) Finite Element Models Two sets of finite element models are required for this work. The first type of model is on the microstructural scale including individual rubber particles or voids. These are 3-dimensional models, drawn for a unit cell assuming all the particles are equidistant from each other. The material properties used for the epoxy matrix and the rubber particles were gained from experimental results. These models were used to derive the cavitation criterion [1] and to find the values of plastic dissipation as a function of strain level. Figure 1a shows the models used to a) Figure 1. Finite Element Models for Microstructural Analyses. a) Simulation of Cavitation b) Analysis of Energy Dissipation. derive the cavitation criterion. The model used to derive the values of strain energy is shown in Figure 1b; this model required rigid surfaces attached to the planes loaded in compression to prevent twisting of the model. It was carefully checked that these planes did not cause extra energy contribution. The second type of model is on the mesostructural scale including a crack. These models use the homogenized material properties of the voided epoxy since the cavitation criterion demonstrates that material around the crack would have undergone cavitation of the rubber particles. These are 2-dimensional models in plane strain. The finite element package used was ABAQUS version 6.9. Most of the models were directly run in Implicit code. However, the geometry of small cracks, needed for the simulation of the pure epoxy resins, did not allow direct convergence in Implicit code. These were initially run in Explicit code, and then converted to Implicit code to allow deduction of J-integral values. The Toughness Model The toughness is postulated to arise from two distinct fracture phases, which have been observed experimentally. They are: 1. Growth of the crack radius 2. Extension of the crack The energy arising from the growth of the crack radius is calculated assuming that the crack starts at the crack radius found for the pure resin and grows to the crack radius for the voided resin. For such crack radius growth there are corresponding increases in both the plastic zone size and the cavitation zone size. The energy arising from plastic zone growth is calculated from the difference in total plastic energy for the two crack sizes, which is found from the two finite element simulations. Note that this calculation ignores the extra energy arising from the additional microstructural fracture mechanisms but since this is a difference calculation the error is expected to be negligible. The energy arising from the cavitation zone growth is calculated from the two finite element simulations to find the change in size of the cavitation zone. The energy associated with this change in size is found from separate microstructural simulations of cavitation and the cavitation criterion [1]. The energy arising from the extension of the crack is calculated using a modified J-integral approach which calculates the energy required to extend the crack. Our modified J-integral approach allows the extra energy arising from the additional microstructural fracture mechanisms to be taken into account. The finite element model is the stationary crack at the point of extension in the voided epoxy. The formulation of this model requires a failure criterion. The deduction of this failure criterion can only be made using a critical distance approach as described in the next section. Figure 2. Contours of Strain around a Crack. The variation of strain ahead of the crack, along the profile shown by the red line in Figure 1, has been extracted. The profiles have been extracted for different values of initial unloaded crack radius, all loaded to the value of fracture toughness of the epoxy resin. The profiles are compared in Figure 3; the profiles are for initial values of crack radius between 1 and 3 µm. These results in Figure 2 show the expected variation of maximum strain at the crack tip; the value of strain is higher for the smaller initial crack sizes. However, close to the crack tip the values appear to converge to a constant value. This convergence has been studied carefully using curve fitting. Convergence is found at strain of 0.26 at a distance of 2.73 µm ahead of the crack. We propose that this strain value should be used as the failure criterion for the voided epoxy. 1.8 Max. True Strain 1.6 1.4 1 1.2 1.25 1.5 1 2 0.8 Failure Criterion 2.5 0.6 3 0.4 We propose that the criterion for the extension of the crack in the voided epoxy must be the failure strain of the pure epoxy. This failure strain must be derived from the known fracture toughness of the epoxy. From finite element simulations, the failure strain at the crack tip can be found for a given fracture toughness, using the J-integral results from the simulations. However, the value of the strain at the crack tip is dependent on the initial radius of the crack tip of the mesh before loading. Thus a failure criterion based on the strain at the crack tip cannot be deduced. Further simulations have been carried for different values of initial crack tip radius. An example of a simulation, showing only the detailed mesh around the crack, is shown in Figure 2. The initial crack radius for this simulation was 1.5 µm, and the contours are for maximum logarithmic strain. The range of the contours is between zero and 1.2 logarithmic strain. 0.2 0 0 0.002 0.004 0.006 0.008 0.01 Distance from crack tip (mm) 0.012 Figure 3. Profiles of Strain ahead of Cracks, of different initial radius, loaded to the same G value. Simulations of cracks in the voided epoxy have been carried out to find the deformed crack size when the strain ahead of the crack is equal to 0.26. Simulations with different values of initial crack radius have been loaded to a chosen G value, and the strain at the convergence of the profiles ahead of the crack has been observed. Iteration was required to gain the required strain value. Critical Distance The theory of critical distances is fully presented by Taylor [2]. For a linear elastic material, the value of critical distance, L/2, is shown to be a function of the critical fracture toughness Kc and critical stress, σc via: 𝐿 1 𝐾 2 = 2𝜋 [𝜎𝑐] 2 Table 1. Summary of Contributions to Fracture Energy (KJm-2). Plastic zone Cavitation J-integral Total Cure growth zone growth 160oC 2.3 0.82 3.1 6.2 120oC 0.45 0.092 0.37 0.91 Conclusions (1) 𝑐 The results shown in Figure 2 are for critical fracture energy, Gc, of 0.46 KJm-2. The critical stress related to the critical strain of 0.26 has been found from the material model. Using the relationship between critical fracture energy and critical fracture toughness and the Young’s modulus, E: 𝐾𝑐2 = 𝐸 𝐺𝑐 (2) The calculated value of critical distance is 34.2 µm, an order of magnitude higher than the value of 2.73 µm found from the finite element analyses. We postulate that this difference may arise from the elastic-plastic material model used for the finite element analyses, which leads to localization of the strain field around the crack tip as shown in Figures 2 and 3. Results This predictive model for toughness has been applied to two different rubber-toughened epoxies. These are ‘model’ materials, prepared in the laboratory, containing 20% volume fraction of rubber particles. The first material, which is cured at 160oC, has mean rubber particle radius of 1.7 µm. The fracture energy of the pure epoxy is 0.46 KJ m-2, which is increased to 5.9 KJ m-2 by the presence of the rubber particles. The second material, which is cured at 120oC, has mean rubber particle radius of 1.4 µm. The fracture energy of the pure epoxy is 0.21 KJ m-2, which is increased to 2.23 KJ m-2 by the presence of the rubber particles [3]. The predicted contributions to the fracture energy for the two materials are summarized in Table 1. Comparing the values of total fracture energy, the value for the tougher material is close to the measured value of 5.9 KJ m-2. However, the predicted value for the less tough material cured at 120oC is only around half the measured value. The contributions from the cavitation zone growth and the J-integral value appear small compared to the tougher material. These differences are currently under further investigation. Toughness is a vital property for adhesives and the prediction of toughness is an important step to allow further developments of tough adhesives. We have developed a model which includes the different contributions to the total fracture energy. The importance of these different contributions can be assessed; further sources of energy for more complex materials could be added. We have applied this model to two different rubber-toughened epoxies and gained good agreement for the tougher adhesive and an underestimate of toughness for the less tough adhesive. This is believed to arise from an under-prediction of the contribution from the J-integral; this is under current investigation. The model has been able to capture the reduction in toughness arising from the different cure conditions. Acknowledgements This work is an extension of a past project which was jointly funded by the Engineering and Physical Sciences Research Council, UK, and the Defence Science and Technology Laboratory, UK. References 1. 2. 3. F.J. Guild, A.J. Kinloch and A.C. Taylor, J. Mater. Sci.. 2010, 45, pp 3882-3894. D. Taylor, The Theory of Critical Distances, 2007, Elsevier Ltd. C.A. Finch, S. Hashemi and A.J. Kinloch Polymer Communications 28 1987 p. 322.