Class_notes_1-10
advertisement

Red means it is quoted from Hornak; Green means it should be
shown in class (e.g., picture, animation, table, etc.)
The Basics of MRI by Hornak
About the author
How to get the book @ $20 per machine.
My annotated version of his Contents (red highlight means included in course):
Preface (Help)
About the author
1. Introduction
o
o
o
o
NMRI or MRI ?
Opportunities in MRI
Tomographic Imaging
Microscopic property responsible for MRI
2. The Mathematics of NMR
o
o
o
o
o
o
o
o
o
Exponential Functions
Trigonometric Functions
Differentials and Integrals
Vectors
Matrices
Coordinate Transformations
Convolutions
Imaginary Numbers
The Fourier Transform
3. Spin Physics
o
o
o
o
o
o
o
o
o
o
o
o
o
o
o
o
Spin
Properties of Spin
Nuclei with Spin
Energy Levels
NMR Transitions
Energy Level Diagrams
Continuous Wave NMR Experiment
Boltzmann Statistics
Spin Packets
T1 Processes
Precession
T2 Processes
Rotating Frame of Reference
Pulsed Magnetic Fields
Spin Relaxation
Bloch Equations
4. NMR Spectroscopy
o
o
o
o
o
o
Time Domain NMR Signal
+/- Frequency Convention
90- FID
Spin-Echo
Inversion Recovery
Chemical Shift
1
5. Fourier Transforms
o
o
o
o
o
o
o
o
o
Introduction
The + and - Frequency Problem
The Fourier Transform
Phase Correction
Fourier Pairs
The Convolution Theorem
The Digital FT
Sampling Error
The Two-Dimensional FT
6. Imaging Principles
o
o
o
o
o
Introduction
Magnetic Field Gradient
Frequency Encoding
Back Projection Imaging
Slice Selection
7. Fourier Transform Imaging Principles
o
o
o
o
o
Introduction
Phase Encoding Gradient
FT Tomographic Imaging
Signal Processing
Image Resolution
8. Basic Imaging Techniques
o
o
o
o
o
o
o
o
Introduction
Multislice imaging
Oblique Imaging
Spin-Echo Imaging
Inversion Recovery Imaging
Gradient Recalled Echo Imaging
Image Contrast
Signal Averaging
9. Imaging Hardware
o
o
o
o
o
o
o
Hardware Overview
Magnet
Gradient Coils
RF Coils
Qadrature Detector
Safety
Phantoms
10. Image Presentation
o
o
o
o
Image Histogram
Image Processing
Imaging Coordinates
Imaging Planes
11. Image Artifacts
o
o
o
o
o
o
o
o
o
Introduction
RF Quadrature
Bo Inhomogeneity
Gradient
RF Inhomogeneity
Motion
Flow
Chemical Shift
Partial Volume
2
o
o
Wrap Around
Gibbs Ringing
12. Advanced Imaging Techniques
o
o
o
o
o
o
o
o
o
o
o
o
o
o
o
o
o
o
Introduction
Volume Imaging (3-D Imaging)
Flow Imaging (MRI Angiography)
Diffusion Imaging
Fractional Nex & Echo Imaging
Fast Spin-Echo Imaging
Chemical Shift Imaging (Fat Suppression)
Echo Planar Imaging (Functional MRI)
Spatially Localized Spectroscopy
Chemical Contrast Agents
Magnetization Transfer Contrast
Variable Bandwidth Imaging
T1, T2, & Spin Density Images
Tissue Classification
Hyperpolarized Noble Gas Imaging
Parallel Imaging
Magnetic Resonance Elastography
Electron Spin Resonance
13. Your MRI Exam
o
o
o
o
o
Introduction
Screening
The Imager
The Exam
Your Results
14. Clinical Images
o
o
o
o
o
o
o
o
o
Angiography
Head & Neck
Spine
Extremities
Glossary
List of Symbols
References
Usage Statistics
Software License
1. Ch. 1. Introduction
1.1. NMR versus MRI
1945: NMR discovered independently by Felix Bloch (Swiss) at Stanford and Edward Purcell
(US) at Harvard (Nobel Prize in Physics for Bloch and Purcell, 1952).
1948: Felix Bloch publishes an equation explaining NMR—now called the “Bloch” equation.
1.2. History of MRI
1971: Raymond Damadian (US), proposed that cancerous tissue might have a different NMR
signal from that of noncancerous tissue.
1972: Paul Lauterbur (US), Dept Chemistry, U Illinois proposed the first MRI method in a twopage article (Nobel Prize in Medicine, 2003).
1975: Richard Ernst (Swiss), Dept Chemistry, ET-H, Switzerland proposed the first MRI method
employing a 2D Fourier transform, “Spin-Warp Imaging” (Nobel Prize in Chemistry, 1991).
3
1977: Peter Mansfield (UK), Dept Physics, U Nottingham, proposed the first “fast” MRI method,
called “Echo Planar Imaging” (Nobel Prize in Medicine, 2003).
1.3. Important imaging techniques:
1.3.1. Spin-warp imaging = minutes
1.3.2. Echo-Planar Imaging (EPI) = fraction of a second.
1.4. Tomography = picture of a slice
1.4.1. CT (X-rays)
1.4.2. MRI (radio waves ~ 40 MHz, just to the left of the FM dial)
1.4.3. PET (gamma waves)
1.5. Digital images
1.5.1. voxel versus pixel
1.5.2. no color, just intensity
1.6. Meaning of intensities
1.6.1. CT: intensity = density of electrons
1.6.2. PET: intensity = density of radioactive material
1.6.3. MR: intensity = density of isolated protons
1.6.3.1. nuclei of hydrogen in water
1.6.3.2. nuclei of hydrogen in fat
1.7. MR machines
1.7.1. Uniform static magnetic field (the “static” field)
1.7.1.1. During all imaging, the static magnetic field is constant and uniform
throughout the imaging volume. In fact one of the expensive aspects of MR
machines is the achievement of a static field that is uniform within the imaging
volume to 1 part per million (ppm).
1.7.1.2. We will henceforth assume that there is a static field, B, pointing in the z
direction , throughout this course.
1.7.1.3. Super conducting: Never turned off (i.e., it is on 24 hours a day)
1.7.1.4. Resistive: Lower fields, usually large enough only for head images
1.7.2. Gradient: Controlled spatial variation in the static field
1.7.3. RF Pulse: Time varying magnetic field at about 40MHz produced by the “RF coil” or
“transmission coil”
1.7.4. Receiver coil: Detects radiation from the protons. The intensity of this radiation is used to
determine the density of the protons.
1.7.5. Show links to GE and Philips scanners
2. Ch. 2. The Mathematics of NMR
2.1. Look at the subsections. All should be familiar. Add the following:
2.1.1. Vectors
2.1.1.1. Know the definitions of the dot product: (1) involving their components, (2)
involving the cosine of the angle between them.
2.1.1.2. Know the definitions of the cross product: (1) involving their components, (2)
involving the sine of the angle between them.
2.1.2. Matrices
2.1.2.1. Know how to multiply a matrix times a vector
2.1.2.2. Know how to multiply two matrices, including the rule that makes
multiplication legal
3. Ch. 5. Fourier Transforms
4
3.1.
Students are responsible for knowing both the continuous and the discrete Fourier transform,
convolution, and the FT of a square wave.
4. MR principles
4.1. Protons precess around the magnetic field direction (usu. z-direction)
4.2. Frequency of precession is proportional to field strength
4.3. When magnetic field from RF coil perpendicular to z rotates at precessional frequency, the protons
absorb energy
4.4. When the rotating field is turned off, the energy is radiated at the same frequency
4.5. The receiving coil measures the strength of the radiation
4.6. With no gradient all protons absorb and radiate at the same frequency
4.7. With a gradient on, the frequencies vary spatially
4.8. The signal produced by the combination of frequencies can be Fourier transformed to show how
the energy radiation is distributed spatially
4.9. The spatial distribution is the MR image
5. Ch. 3. Spin Physics
5.1. Spin: Each proton has a permanent “spin” of value 1/2.
5.2. Properties of Spin
5.2.1. Spin means that the particle has angular momentum and energy. It can change its energy
level by absorbing a photon from radiation whose frequency B / 2 (Larmour
equation), where gamma is the “gyromagnetic ratio”, where B is the strength of the
magnetic field, usually given in Tesla. It ranges from 0.5 T to 3 T for clinical scanners.
Vanderbilt is getting a 7 Tesla, whole-body scanner by the fall of 2005.or B , where
“gamma-bar”, / 2 . For the proton, gamma = 267.8Mrad/s/T and gamma-bar
equals 42.58MHz/Tesla.
5.3. Nuclei with Spin (omit)
5.4. Energy Levels
5.4.1. In a magnetic field, the proton can be in two energy states: Low when aligned with the
field, High when opposed to it.
5.4.2. Transitions
5.4.2.1. When a photon is absorbed, the proton’s energy increases by E h , where h
is Planck’s constant. When a photon is released, it decreases by the same
amount.
5.5. Energy Level Diagrams (omit)
5.6. Continuous Wave NMR Experiment (omit)
5.7. Boltzmann Statistics
5.7.1. Protons in a magnetic field are continually absorbing and releasing energy, jumping
between high and low states.
5.7.2. At equilibrium at absolute temperature T, the ratio:
5.7.2.1. N_opposed/N_aligned = exp -E / kT .
5.7.2.2. At room temperature, N_aligned is about 1/100,000 greater than N_opposed.
5.8. Spin Packets
5.8.1. The individual proton is governed by quantum mechanics, but fortunately, we can work
with large numbers of protons at a time—large enough to permit us to use equations from
classical mechanics.
5
5.8.2.
5.9.
The protons produce their own magnetic fields, and their fields add or subtract depending
on their directions.
5.8.3. In the presence of a magnetic field, they precess continuously about the field.
5.8.4. Magnetization
5.8.4.1. Because of random perturbations, their net field in the xy plane is zero, but the
field in the z direction is proportional to N_aligned – N_opposed.
5.8.4.2. Because of the 1/100,000 larger value of N_aligned over N_opposed, there is a
slight magnetization that adds to the impressed magnetic field.
5.8.4.3. The magnetization strength is labeled M0.
5.8.4.4. M0 is proportional to N_aligned – N_opposed.
5.8.4.5. So Mx = My= 0, and Mz = M0.= constant times (N_aligned – N_opposed).
5.8.4.6. The actual value of M is not important. All that typically matters are the ratios
of its components to M0: Mx / M0, My / M0, Mz / M0, or the ratios of values of
M0 at different static-field strengths or at different temperatures (see homework
problem) or for different substances.
Precession
5.9.1. (NOTE: I’ve changed the order from Hornak’s, which had T1 Processes before
Precession. I did this after one of the students who had just heard my lecture on these two
subjects in Hornak’s order ask questions. He and I realized that the order was confusing
things. Also, I’ve added something about how the RF field puts the spins within the
packets into phase, and I’m giving both a quantum-mechanical and a classical-mechanical
description of what happens when a resonant RF field is applied.)
5.9.2. As pointed out above in “Spin Packets”, at equilibrium, Mx = My = 0.
5.9.3. Now suppose a second magnetic field (in addition to the static field B_0 in the z direction
that we are assuming is always present throughout this course) of magnitude B1 is turned
on perpendicular to the static field and rotating about the z-axis clockwise (as viewed
from the top of the z-axis looking back toward the origin) at a frequency equal to the
Larmour frequency. Such a field is applied for every MR image, and it is called the
“transverse” field, because it is perpendicular to the static field, or the “Radio-Frequency
field”, or, more commonly, the “RF field”, because it varies at a frequency equal to that of
common radio waves.
5.9.4. Quantum mechanical description of the result:
5.9.4.1. This rotating field will cause the individual protons in the spin packet (a) to
precess in phase with each other and (b) to cause the ratio
N_opposed/N_aligned to increase, as protons aligned with the static field
absorb energy from individual photons of the electromagnetic field produced
by the rotating field and become opposed to the static field.
5.9.4.2. The absorption of energy by the protons is possible because the frequency of
the rotating field is exactly correct to produce photons whose energy is exactly
equal to the difference in energy between the aligned and opposed orientations.
5.9.4.3. Having these frequencies match is called “resonance”.
5.9.4.4. If the field is turned off when N_opposed/N_aligned = 1, then, Mz = 0, and,
because the protons are precessing in phase, M rotates clockwise about the z
axis in the xy plane. Since this rotation requires only about a hundredth of a
second, the RF field that does it is called an “RF pulse”.
5.9.5. Classical mechanical description of the result:
6
5.9.5.1.
This rotating field will cause the magnetization vector M to rotate about the
magnetic field that is the total of the static field and the rotating field, and, as a
result, its total motion will be to tip slowly and steadily away from the z axis
while its xy component rotates about z at the Larmour frequency in the
clockwise direction. The equation governing the rotation rate is
dM t
dt
5.9.5.2.
5.9.5.3.
5.9.5.4.
M t B t
(1)
The steady tipping of M away from the z axis is possible because the rate of
rotation of the field is exactly equal to the rate of rotation of M about the field.
With any other rate, M will wobble around z but will remain near the z axis.
Having these rates of rotation match is called “resonance”.
If the field is turned off when the tip angle = 90 degrees, then Mz = 0, and M
rotates clockwise about the z axis in the xy plane. As above, since this rotation
requires only about a hundredth of a second, the RF field that does it is called
an “RF pulse”. Show the second graphic in Ch 5 NMR Spectroscopy, The 90FID Sequence.
5.10. T1 Processes
5.10.1. The equilibrium magnetization vector (0, 0, M0) can be disturbed to a value (Mx, My, Mz)
by radiating the protons with electromagnetic radiation at the Larmour frequency.
5.10.2. When the radiation is removed, the value M = (0, 0, M0) will be re-established over time.
The evolution of the x and y components will be discussed below under T2 Processes.
The z component’s evolution obeys the equation:
M z M 0 1 e t / T 1 ,
where T1 is determined by the molecular environment of the spin packet. In NMR
literature, T1 is called the “spin-lattice” relaxation time. Show the third graphic in Ch. 3.
Spin Physics, T1 Processes.
5.10.3. While M0 varies somewhat with tissue type, T1 varies much more strongly. This variation
is exploited (below) to make tissues have different intensities in MRI.
5.11. T2 Processes
5.11.1. After an RF pulse has been applied, the component of M that lies in the xy plane,
sometimes called the “transverse” component, rotates at the Larmour frequency, but, also,
its magnitude begins to attenuate.
5.11.2. The attenuation happens because the individual protons that comprise the spin packet
begin to dephase. Show the third graphic in Ch 5 NMR Spectroscopy, The 90-FID
Sequence. They dephase because they are exposed to slightly different magnetic fields.
The difference happens for two reasons:
5.11.2.1. The fields caused by other protons in the molecules near a given proton within
the spin packet vary temporally and spatially according to the protons’
orientations and how near or far they happen to be from the given proton.
Hornak calls this effect the “pure” molecular effect.
5.11.2.2. The average static magnetic fields caused by electrons in the molecules near a
given proton within the spin packet vary according to their orientations, their
motions, and how near or far they happen to be from the given proton. This
average field is major contributor to the magnetization of the object. As a result
of this spatially varying magnetization, the local static magnetic field varies
from one proton to another. Furthermore, the MR scanner itself suffers from
7
some spatial nonuniformity in its impressed static field. This effect is said to be
due to static field “inhomogeneity”. (We will look at this effect in detail later.)
5.11.3. The resulting evolution of the magnitude of the component in the xy plane obeys the
equation:
M xy M xy 0 et / T 2
where (0) means the value of the component at t = 0 and T2 is determined by the
molecular environment of the spin packet. Because of the universal use of the symbol T2,
this phenomenon is often called “T2 decay”.
5.11.4. For all molecular environments, T1 > T2, so Mxy goes to zero faster than Mz goes to M0.
5.11.5. A common approximation (we’ll make it more exact later) is to write
M xy M xy 0 et / T 2* ,
1 T 2* 1 T 2 1 T 2inhom
where T2 is due to the pure molecular effect and T2_inhom is due to static field
inhomogeneity. In the NMR literature, T2 is called the “spin-spin” relaxation time. To
emphasize that this dephasing is caused both by pure molecular effects and to static-field
inhomogeneity, the decay is often called “T2-star decay”.
5.11.6. Like T1, T2 varies with tissue type, and it is another variation that is exploited (below) to
make tissues have different intensities in MRI.
5.11.7. For B = 1.5 Tesla, typical values of T1 are given in a Table in Ch 4 NMR Spectroscopy,
Problem 2.
5.12. Rotating Frame of Reference and Pulsed Magnetic Fields
5.12.1. It is mathematically convenient to define a coordinate system that is rotating relative to
the stationary laboratory frame of reference clockwise at the Larmour frequency. In this
rotating frame, Bz is the same as in the laboratory frame, but the xy component of B, B1, is
stationary. We will assume, as most people do, that the orientation of the rotating frame is
chosen so that Bx = B1 and By =0. In this frame, the only motion of M that takes place is
as follows:
5.12.1.1. Before the RF pulse is applied, Mz evolves toward its equilibrium value, M0.
5.12.1.2. During the RF pulse, M rotates about the x axis. Show the first graphic in Ch
4 NMR Spectroscopy, The 90-FID Sequence. We will henceforth assume that
the RF pulse is so short that the evolution of Mz toward M0 is negligible while
an RF pulse is being applied. Thus, during the RF pulse, Mz decreases and My
increases, while Mx remains equal to zero:
M y M 0 sin B1t ,
M z M 0 cos B1t .
5.12.1.3. After the RF pulse, the evolution of Mz toward M0 starts again,
M z M 0 1 e t / T 1 ,
and My begins to decay,
M y M 0 et / T 2* ,
while Mx remains equal to zero. As mentioned above, the reason for this decay
is the dephasing of the protons’ spins caused by spin-spin interaction. The
transverse field, B1 will be left on for a time interval . If the interval is such
that B1 is equal to pi/2, which is 90 degrees, then the magnetization of the
spin packet is rotated into the xy plane, and the RF pulse is called a “90-degree
8
pulse”. There are 15-degree pulses, 20-degrees, and every other number up to
180. The most common are 90 and 180.
5.12.1.4. Henceforth we will assume that is not only much smaller than T1 but even
much smaller than T2.
5.13. Spin Relaxation
5.13.1. Both T1 and T2 vary with temperature, with the strength of the static field B, and with
tissue properties,. Ordinarily the temperature does not change appreciably in the human
body, so it is not a factor, but it is important when ultrasonic heating is used to kill tumor
tissue. By monitoring changes in the MR image it is possible to halt the heating before
nondiseased tissue is harmed. Both T1 and T2 tend to decrease as the B field increases,
but the field is so uniform across the scanner that it is not a factor within an image. It does
change the contrast patterns from a low-field scanner to a high-field one. The major
factor in imaging is the differences in T1 and T2 across tissue types.
5.14. Bloch Equations
5.14.1. The equation that Felix Bloch produced in 1948 describes the three phenomena of (1) the
rotation of a spin packet around the magnetic field, (2) the evolution of Mz, and (3) the
evolution of Mxy:
(M x xˆ + M y yˆ ) (M 0 - M z )ˆz
dM
= g ( M ´ B) +
,
dt
T2
T1
(2)
where x̂ , ŷ , and ẑ are unit vectors in the x, y, and z directions.
5.14.2. When B varies with time, as it does, for example, when the RF pulse is active, there is no
analytic solution to the Bloch equation. In that case, the Bloch equation must be solved
numerically. Fortunately, for the purposes of this course, we will need to consider only
special cases in which there is a solution.
5.14.3. The first special case occurs when M is at first directed along the z axis, and then an RF
pulse is applied for a that is much shorter than T2. Since is much less than T2 and
T1, we can neglect the second two terms of the Bloch equation. Thus, during an RF pulse:
dM
= g ( M ´ B)
dt
(3)
Furthermore, it is not too difficult to show that in the rotating reference frame (see above)
the equation becomes
dM
= g ( M ´ B1 ) .
dt
(4)
5.14.4. The second special case is the case in which B is constant with time and directed along z.
There is, in that case, a simple analytic solution (see Problem Assignment 1). Also, there
is a simpler form of the equation that holds in the rotating reference frame:
(M x i + M y j) (M 0 - M z )k
dM
= +
dt
T2
T1
(5)
6. NMR Signals (i.e., without imaging) Ch. 4 NMR Spectroscopy
6.1. Getting a signal. We will go back to the laboratory reference frame and Eq. (2). Use the first and
second graphic in Ch. 4 NMR Spectroscopy ,The Time Domain NMR Signal to illustrate how a
signal is induced. (There is no slice selection here because we are not making an image!)
6.2. Because of the T2 decay, the signal gets smaller as it oscillates. Show the third graphic. Because
the signal is produced by magnetic induction (from the protons to the receiver coil) and because
there is no RF pulse driving the protons, this signal is called “Free Induction Decay”, or “FID”.
9
6.3.
6.4.
6.5.
6.6.
As was mentioned earlier, the reason for the decay is two-fold: pure molecular effects and staticfield inhomogeneity. It is possible to “undo” that part of the decay that is due to the static-field
inhomogeneity by means of a second RF pulse. Show the first four graphics of Ch 4, NMR
Spectroscopy, The Spin-Echo Sequence. Because, in early experiments there was observed a
second, weaker version of the FID signal after the second RF pulse, it was, and is still today, called
a “Spin-Echo”. The time interval between the first RF pulse and the maximum of the echo, is
called the “Echo time” TE. That time is exactly twice the interval between the first and second RF
pulses.
Many sequences, such as the Spin-Echo Sequence, or “SE” sequence, have been developed in
NMR and MRI. To communicate a specific sequence, a “pulse sequence diagram” is used. Show
the fifth graphic of Ch 4, NMR Spectroscopy, The Spin-Echo Sequence. Note that, in MRI, in
order to get enough data to construct a complete image, it is necessary to repeat a sequence many
times. The time interval between the first RF pulse of successive sequences is called the
“repetition time”, or “TR”.
Here are some sequences that you should be able to draw and for whose signal strengths, you
should be able to give expressions:
6.5.1. Repeated 90-FID sequence. S k 1 e TR T 1 .
6.5.2.
Repeated SE sequence. S k 1 e TR T 1 e TE / T 2 , where TE = the time interval between
6.5.3.
the 90-degree pulse and the maximum of the echo.
Repeated Inversion-Recovery (IR) sequence. S k 1 2e TI T1 e TR T1 , where TI is the
“inversion-recovery time” time.
Chemical Shift
6.6.1. There is one more field that affects the frequency of the protons’s precession: the
electrons of the molecule that contains the H-atom. That field causes a shift in the
Larmour frequency that is always the same for that molecule. Because it is related to the
“chemical” nature of the molecule, it is called a “chemical shift”. Because the electrons
reduce the field, the effective field has the form B B0 1 , where the value of sigma is
on the order of a few parts per million. In the body, the two significant signal producers
are water and fat. Their difference is about 3.5 parts per million (ppm). Since water is
more important, this frequency shift is called the “fat shift”. It also has that name because
the apparent position of fat is shifted in the image because of the frequency shift.
7. Ch. 6. Imaging Principles
7.1. Introduction (doesn’t say much)
7.2. Magnetic Field Gradient
7.2.1. A gradient is a spatial derivative of some quantity. In an MR scanner it is the derivative of
the z-component of the magnetic field (when there is no RF pulse).
7.2.2. Electric current in special built-in coils, called “gradient coils”, that surround the imaging
region can be turned on at varying strengths, positively or negatively so as to add a small
magnetic field in the z direction that varies linearly across the field. The result is that the
total static field B = B0 + Bgradient varies linearly by a few milliTesla across the imaging
region. The gradients are designed such that at the center of the field B = B0, with B< B0
on one side and B> B0 on the other.
10
7.2.3.
7.3.
There are three sets of gradient coils, named by the direction of the gradient that they
produce: Gx, Gy, and Gz. They can be turned on singly or together to produce a gradient in
B in any direction, but they are typically turned on singly.
7.2.4. While an image is acquired, gradients in all three directions are turned on and off at
varying strengths. Because of the magnetic forces produced when a gradient coil is
energized, there is a slight change in shape, which causes a loud “banging” sound, or a
buzzing sound. This is the only sound a scanner makes, but it can be disconcerting to a
person being scanned. There are no moving parts during the scan (except for the electrons
moving to make the currents!)
7.2.5. Because any of the gradients can be turned on and off any order, there is nothing special
about one orientation or the other. For example, a slice of the body that is perpendicular to
the line from right to left can be acquired as easily as a slice that is perpendicular to a line
running from feet to head. The former is called a “sagittal” view, the latter an “axial”
view. The view perpendicular to the line running front to back is called the “coronal”
view. The front is called “anterior”, the back is “posterior”, the direction toward the head
is “superior”, toward the feet is “inferior”. Left to right is “lateral”.
Frequency Encoding
7.3.1. When a gradient is applied, the spin packets at one position experience a different field
from those at another. As a result, their Larmour frequencies vary across the field as well.
For example, if the x-gradient is turned on with a strength Gx, then
B x, y, z B0 xGx ,
v x, y, z B0 xGx ,
v0 xGx .
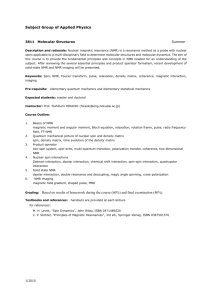
At some values of x the density of spin packets will be higher than at other values, which
means that M0 is different from one value of x to another. At the high-frequency end there
may be, say, fewer packets, so M0 is smaller. At the center, x = 0, where the frequency is
equal to 0 , there may perhaps be very few, even zero at some nearby point, and near the
negative end of x, there may be a very large number of packets. If so, a plot of the density
might look like this:
The vertical axis is the number of spins per unit length, or it could be M0 per unit length,
since they are proportional. The horizontal axis above is the x axis, but it could also
represent frequency, because the frequency is proportional to x. Such a plot depicts
“frequency encoding”, because the frequency of a spin reveals the position of the spin. It
is this encoding that is the basis for all MR imaging.
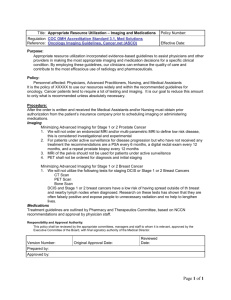
7.3.2.
As the magnetic vectors of these spin packets rotate, they radiate energy. The radiation
will be at the frequency of rotation. In this case, there will be frequencies over the range,
11
0 FOV 2 Gx , 0 FOV 2 Gx ,
where FOV is the “Field of View”, which is the width of the imaging region. If the
receiver coil is tuned so that it can pick up all the frequencies in this range, the signal that
is received might look like this
where the horizontal axis is time. In fact, two signals are picked up, one, sx(t), which is
arises from Mx and sy(t), which arises from My. The signal shown above happens to be sy.
The other signal sx might look like this:
As described above, these two signals can be combined into one complex signal:
s t sx t is y t
As a result, the outputs of the two amplifiers that give these signals as outputs are called
the “real channel” and the “imaginary channel”. The recording of these signals is called
“readout”. The gradient that is turned on during readout, which in this example is Gx, is
called the “readout gradient” or the “frequency-encoding” gradient.
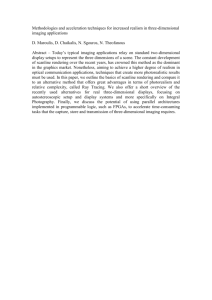
7.3.3.
The outputs of these two channels is digitized and recorded. A digital Fourier transform of
s(t) is carried out by a computer (typically the one running the scanner itself):
12
S 0 F {s t } . S 0 is usually complex, but a plot of S 0 will look
something like this:
where the vertical axis is the amplitude of the Fourier transform. It shows a onedimensional image of the density of spins: an MR image!
Field questions about HW Assignment 1 (~12 minutes)
Reprise of what we’ve done so far:
Driving force is to get a 3D map of the density of spin packets (worry about T1,T2 later)
MR is good because it penetrates the body and is non-ionizing, but its wavelength is too long to
permit our looking at transmitted or reflected waves
Bloch’s equation shows (could demonstrate it in Matlab for example) that the resonance phenomena
happens: Unless B1 is rotating at the Larmor frequency, M only wobbles: not much tilt.
Maxwell’s equations (beyond our scope) show that if M rotates it will radiate.
Need to excite only a region. Then we can infer that any radiation must come from that region.
We can excite one slice at a time and then can frequency-encode in, say, the x direction.
What’s left is the y direction
That will be done using a new encoding method, called “phase encoding”, but before we look at that,
we will look more carefully at how frequency encoding works.
How frequency encoding works
Sketch a pulse sequence that includes a phase-encoding y-gradient, but don’t explain how it works.
Write out in integral form the relationship between the signal s(t) and the spin-density: s(t) = integral
of spin density times exponential. Pull the common exponential with the central frequency outside the
integral.
Re-arrange so that the y and z integrals are part of the x-integrand and then define an “x-density”,
which is a projection within the z-plane onto the x axis.
Change variables so that the x-integral looks like an inverse Fourier transform of from x space into
temporal space.
Ask the class to accept on faith that it is easy by analog or digital transformations to move into the
rotating frame, thereby removing the factor outside the integral.
Point out that the Fourier transform of the signal is now seen to be equal to the x-density.
Preview of phase endocing
Now go back and explain that there will be a repetition of the sequence drawn on the board at the
beginning in which the y-gradient will be changed. Give as an example the case in which it starts out
large, becomes half size on the second repetition, goes to zero on the third, to negative half size on
the fourth and to full negative on the fifth.
13
Suggest that we could acquire, during each readout, 5 (complex) numbers. Show a 5x5 array of dots
representing the 25 values.
Say that next time we will learn how to use a 2-D FT to change those 25 values into 25 intensities
arrayed in x by y fashion.
Correct the error of gamma that was originally in the notes, on the board, and in the
homework. The change to these originals is that everywhere, except in the Bloch
equations, , where 2 . I’ve already made that change in Homework
Assignment 1 (by simply changing 2 to ).
7.4.
Signal from a single spin packet.
Because the signal is a combination of many spin packets with differing frequencies, the form of
s(t) is complicated, but the form of the signal produced by a single spin packet is simple. Suppose
the protons in an object inside the scanner are allowed to reach equilibrium, then a 90-degree pulse
is applied, and then Gx is turned on. With t set to 0 at the moment that the pulse ends and Gx
begins, the equations of motion for a spin packet at position x,y,z are
M x M 0 sin 2 v0 xGx t e t T 2 ,
M y M 0 cos 2 v0 xGx t e t T 2
M z M 0 1 e t T 1 ,
The signal for this spin packet is
s (t ) A sin 2 v0 xGx t i cos 2 v0 xGx t e t T 2
iA i sin 2 v
0
Ae
xGx t cos 2 v0 xGx t e t T 2
i 2 v0 xGx t t T 2
e
Notes about this formula. The i after the A is there because initially, the magnetic vector is lying
in the y direction, instead of the x direction. We have absorbed i into A. The negative sign in the
exponent means that the rotation is clockwise, instead of counter clockwise. If we ignore the T2
decay, the Fourier transform of this signal will be a single delta function at the frequency,
v0 xGx . The T2 decay causes a spread in this delta function. The shape is the so-called
“Lorentzian”. The kernel has the form c1 2 c2 2 . We will usually be able to ignore this spread
when considering distortion problems. Ignoring the T2 decay, means that the signal for a spin
packet is
s t Ae
i 2 v0 xGx t
8. FT Imaging Principles
8.1. Given that we have excited only one slice, it remains for us to produce a two-dimensional image of
that slice. One dimension can be provided by frequency encoding. The second dimension is
provided by means of “phase encoding”.
14
8.2.
First, let’s look at a Fourier transform without considering MRI. 1D first:
F f x , kx F kx
f x e
i 2 k x x
dx
f x F 1 F k x , x
F k e
i 2 k x x
x
dk
And 2D:
F f x, y , k x , k y F k x , k y f x, y e
i 2 k x x k y y
dxdy
f x, y F 1 F k x , k y , x, y F k x , k y e
8.3.
i 2 k x x k y y
dk x dk y
Suppose we excite a slice with a 90-degree pulse and then, before we turn on the readout gradient
in the x direction, we turn on a gradient in the y direction. We leave it on for a time p and then
turn it off. [Show a pulse sequence.] After that gradient is turned off, the signal produced by a spin
packet at a position x,y,z will look like this
Ae
i 2 v0t yG y p
The total signal will look like this:
s t A x, y, za e
i 2 v0t yGy p
Aei 2 v0t x, y, za e
dxdy
i 2 yGy p
dxdy
As discussed earlier, we will assume that the high frequency oscillation is eliminated before
processing by effectively acquiring the signal and transforming it to reference frame rotating at 0 .
This transformation is accomplished by a device called a “quadrature detector”. Further
information can be found in Hornak, Ch. 9, Imaging Hardware, Quadrature Detector.
As a result, we can drop the exponential term in front of the integral signs to get,
s t A x, y, za e
i 2 yG y p
dxdy
We now turn on a frequency-encoding gradient in the x direction for a time f and let tr (the r is
for “readout”) be the time elapsed since the beginning of that gradient (no gradient echo yet):
s t f A x, y, za e
i 2 yG y p xGx t f
dxdy
(6)
for 0 t f f . While the frequency-encoding gradient is on, we read, or sample, the signal at each
interval t :
15
sm s mt A x, y, za e
i 2 yG y p xGx mt
dxdy
(7)
We acquire N signals. Then, we apply another 90-degree RF pulse and repeat the whole process,
but this time we change Gy. We will do this over and over, each time choosing Gy nGy :
smn A x, y, za e
If we define k x
i 2 ynG y p xGx mt
dxdy
(8)
Gxt f m Gx t and k y Gy p n Gy p , we have
s k x , k y A x, y, za e
i 2 k x x k y y
dxdy
(9)
It can be seen that s k x , k y is the two-dimensional Fourier transform of the two-dimensional
function of density, x, y, za . Because of the common use of the letter k in Fourier transform
literature, the Fourier transform is said to existe in “k space”. If we take the inverse 2D Fourier
transform of s k x , k y , we get A x, y, za .
Take questions about HW 2. Draw pulse sequences on board for Problem 3
Put Eqs. (6)-(9) back on the board.
(NOTE: It is easy to show that if a Fourier transform is taken of s k x , k y , instead of an inverse
transform, then the resulting density is simply a 180 rotation of x, y, za about the z-axis.)
A problem with the Fourier transform is that it cannot extend over infinity in the kx direction,
because the image acquisition is only over a finite time. It is not practical to extend the acquisition
over an arbitrarily large time interval because the signal dies out with T2 decay. After a while, the
“signal” is nothing but noise. Also, we cannot measure the Fourier transform for negative values
of kx, since time starts when we sample and is therefore nonnegative! We will see how to solve
that problem with a so-called “gradient echo”.
We can’t solve the problem of infinity, but we will later consider the effect of finite readout time
on the image.
8.4.
“Gradient echo” or “gradient-recalled echo”.
Show or draw the third graphic (pulse sequence) in Ch. 8 Basic Imaging Techniques, Gradient
Recalled Echo Imaging. Stipulate that the defocussing gradient extends over an interval that is
equal to 12 f . It allows us to collect signal over twice the interval as without it. If there were no T2
decay, we would collect twice the signal, but because of T2 decay we get somewhat less than
twice.
16
Change the origin of time tf to be the center of the readout interval, so that during readout,
12 f t f 12 f . Now look at the signal at the end of the defocusing gradient and the phase
encoding gradient:
s 12 f A x, y, za e
Next look at the signal during readout:
s t f A x, y , za e
A x, y, za e
i 2 yG y p xGx f / 2
dxdy
i 2 yG y p xGx f / 2 xGx t f f / 2
i 2 yG y p xGx t f
dxdy
dxdy
Be careful to explain that t f f / 2 t f f / 2 in the exponent in the first integral. Note that
this looks just like Eq. (6), but the range of tf now includes negative values. If we repeat the
sequence with different values of the phase-encoding gradient, as above, sample as above, and, as
above, define k x Gxt f m Gx t and k y Gy p n Gy p , we again have
s k x , k y A x, y, za e
i 2 k x x k y y
dxdy ,
but this time we have both positive and negative values of kx. Neither kx nor ky will extend to
infinity, but they are centered around the origin. [Show a diagram of k space.]
8.5.
Inhomogeneity.
We have ignored inhomogeneity in the static field. Suppose there is a perturbation of the field
B x, y, z . Then, it causes a continuous change in the phase from what we expect:
s G y , t f A x, y, za e
i 2 yG y p xGxt f B x , y , za t
dxdy ,
where t is the elapsed time since the 90-degree pulse. The time elapsed between the 90-degree
pulse and the echo is called the “echo time”, TE. Therefore,
s Gy , t f A x, y, za e
i 2 yGy p xGxt f B x , y , za t f TE
dxdy
At the center of the echo, where tf = 0, the signal is
s G y , t f 0 A x, y, za e
17
i 2 yG y p B x , y , za TE
dxdy
(10)
8.6.
Spin Echo.
Show the first graphic (pulse sequence) in Ch. 8 Basic Imaging Techniques, Spin-Echo
Imaging. Or draw one in which events take place in this order: 90-degree, phase encoding and xdefocusing, 180-degree, x-readout. Stipulate again that the defocusing gradient extends over an
interval that is equal to 12 f but this time it is not inverted. Again, let the origin of time tf to be the
center of the readout interval, so that 12 f t f
1
2
f . Call the time from 90 to 180 pulse TE/2.
Point out that the gradient echo and the spin echo need not be coincident. Ask the class to
comment on the restrictions necessary to get coincidence. ANS: The defocusing gradient can be
anywhere before the readout gradient. The 180-degree pulse must be centered at the time that is
exactly one-half of the time from the 90-degree pulse to the center of the readout gradient. Now
look at the signal at the beginning of the 180-degree pulse. Ask the class what the effect on the
maximum signal will be of a non-coincidence. Of a coincidence but at a longer TE. This is a good
time to revisit what the source of the two types of T2 decay are.
The signal looks like this at the instant before the 180-degree pulse:
A x, y, za e
i 2 yG y p xGx f / 2B x , y , za TE / 2
dxdy
The 180-degree pulse now rotates the spins about the x axis 180 degrees which leaves the real
component alone but negates the imaginary component, thus taking the complex conjugate gives
the signal at the instant after the 180:
A x, y, za e
i 2 yG y p xGx f / 2B x , y , za TE / 2
dxdy
Now look at the signal at the beginning of readout:
s Gy , 12 f A x, y, za e
A x, y, za e
i 2 yG y p xGx f / 2B x , y , za TE / 2B x , y , za TE 2 f / 2
i 2 yG y p xGx f / 2B x , y , za f / 2
dxdy
dxdy
and at TE, the signal is,
s Gy , t f 0 A x, y, za e
i 2 yG y p
dxdy
This signal should be compared with that of Eq. (10). The missing B x, y, za means that the
only dispersion in spins is that due to the phase-encoding gradient. It is for that reason that the
180-degree pulse causes a larger echo (larger than the mere gradient echo). The complex conjugate
18
means that the spins are rotated 180-degrees around the z axis relative to the situation without the
180-degree pulse.
The signal during readout has the form:
s Gy , t f A x, y, za e
i 2 yGy p xGx B x , y , za t f
dxdy
We will examine the effect of the perturbed field on the reconstructed image in great detail soon,
but for now, let’s assume that it is zero. So we have
s Gy , t f A x, y, za e
i 2 yG y p xGx t f
dxdy
We will also assume that the phase encoding gradients are reversed when the 180 is used,
Gy nGy , so
s Gy , t f A x, y, za e
i 2 xGxt f yG y p
s k x , k y A x, y, za e
i 2 xk x yk y
where k x
dxdy,
(11)
dxdy,
Gxt f m Gx t and k y Gy p n Gy p , as before, and G y is the value
of the y gradient that would have been used if there were no 180 pulse (i.e., its sign is the opposite
of the actual y gradient). As with the Gradient-Echo sequence, we have ignored inhomogeneity in
the static field. Again, we suppose that there is a perturbation of the field B x, y, z . This time,
however, the phase produced by the inhomogeneity during the time interval, TE/2, between the 90
and 180 pulses is exactly negated by the 180 pulse, at which time the sign of the exponent is
changed. Then the same phase is produced at the same rate again, canceling more and more of the
original. After the interval TE/2, at which time tf = 0, it will be completely and exactly cancelled.
Thus, the signal looks like this for an arbitrary time tf during readout:
s Gy , t f A x, y, za e
i 2 xGxt f yG y p B x , y , za t f
dxdy
At the center of the echo, where tf = 0, the signal is
s G y , t f 0 A x, y, za e
i 2 yG y p
dxdy ,
which is the same signal that we calculated for the Gradient-Echo sequence when there was no
inhomogeneity! For comparison recall that with inhomogeneity, at the echo, the GE signal looked
like this (Eq. (10) above):
19
s G y , t f 0 A x, y, za e
8.7.
i 2 yG y p B x , y , za TE
dxdy
Field of View. All MRI machines perform an inverse Fourier transform to produce an image, and
they perform such a transform digitally. The signal must therefore be sampled. The sampling
interval t , the magnitude, G x of the frequency encoding gradient, the time p interval of the
phase encoding gradient, and its magnitude, G y , determine the “Field of View” (FOV) of the
image.
To understand why, we must remember what happens with sampled Fourier transforms: The
transforms are periodic. We will assume that that there are M samples collected during readout and
N repetitions of the sequence in which the phase encoding gradient is changed, and we will assume
that N is an even number. Then, m M / 2..M / 2 1, n N / 2..N / 2 1. It helps to define
some convenient quantities:
Y G y p ;
1
X Gx t ,
1
x X M ,
y Y N ;
m x / x,
n y / y;
Typically gradients, and time periods, are chosen so that X = Y, and the number of samples and
number of phase encodings are equal, so that M = N, but we will keep them independent in our
derivation.
Returning to Eq. (11), and using these definitions, gives
s kx , k y A
x, y , z a e
i 2 xk x yk y
dxdy,
excited region
I m, n s m / X , n / Y B
mx, ny e i 2 mm / M nn / N dmdn
excited region
We consider the integral to be approximated by a sum, as follows:
I m, n C mx, ny ei 2 mm / M nn / N ,
m
n
where the sums extend over at least the excited region. Then, we can get an image by taking the
inverse transform, The inverse transform looks like this:
20
i m, n D
M 21
N 21
I m, n e
i 2 mm / M nn / N
,
m M 2 n N 2
where i m, n mx, ny (and, although it is of little consequence, D C MN ) is the
reconstructed image. [Point out that the upper case I is now suggestive of the Fourier Transform of
the image, which is lower case].
We note that, because of the periodic nature of the discrete Fourier transform,
i m, n D mx pX , ny qY
p
q
i m M , n N ,
where the sums extend over at least the excited region. [Show a 2D repeating pattern.]
If x, y is nonzero outside the Field of View— X 2 x X 2,
there will be “Wrap Around”.
Y 2 y Y 2 —then
The top will show up on the bottom and vice versa and/or the left and right will overlap. The
solution is to sample more often or to insure that the RF excitation does not extend beyond the
FOV. Examples can be found on the web. Check out www.radiology.co.uk/srs-x/cases/084/d.htm.
8.8.
Ch. 8, Basic Imaging Techniques, controlling contrast by adjusting TR and TE
For Spin-Echo images S k 1 e TR T 1 e TE / T 2 and for Gradient-Echo images,
S k 1 e TR T 1 e TE / T 2* . By adjusting TR and TE it is possible to emphasize the importance of T1,
T2, or proton density. Because of T2* effects, GE images work well only for very short TE. Thus, they
are used only for T1-weighted images or proton density. The limits below are not hard ones.
Short TR (< 500 ms)
Long TR (> 1500 ms)
Short TE (< 25 ms)
T1 weighted
Proton-Density weighted
Long TE (> 60 ms)
T2 weighted
Look at examples in Hornak:
T1 weighted: Gradient Recalled Echo (TE=5 ms), theta = 90 degrees, TR = 50 ms
PD weighted: Spin-Echo, TR = 2000, TE = 20
T2 weighted: Spin-Echo, TR = 2000, TE = 80
8.9.
Ch. 8, Basic Imaging Techniques, Signal Averaging
21
To improve signal-to-noise levels, Number of excitations (Nex) is increased beyond 1.
8.10. Ch. 8, Basic Imaging Techniques, Multislice Imaging.
I can’t do this better than Hornak. Herewith his own words,
“An imaging sequence based on a 90-FID was introduced in Chapter 7. Based on this presentation,
the time to acquire an image is equal to the product of the TR value and the number of phase
encoding steps. If TR were one second and there were 256 phase encoding gradient steps the total
imaging time required to produce the image would be 4 minutes and 16 seconds. If we wanted to
take 20 images across a region of interest the imaging time would be approximately 1.5 hours.
This will obviously not do if we are searching for pathology. Looking at the timing diagram for the
imaging sequence with a one second TR it is clear that most of the sequence time is unused. This
unused time could be made use of by exciting other slices in the object. The only restriction is that
the excitation used for one slice must not affect those from another slice. This can be
accomplished by applying one magnitude slice selection gradient and changing the RF frequency
of the 90o pulses. Note that the three frequency bands from the pulses do not overlap. In this
animation there are three RF pulses applied in the TR period. Each has a different center frequency
1, 2, and 3. As a consequence the pulses affect different slices in the imaged object. ”
8.11. Ch. 8, Basic Imaging Techniques, Oblique Imaging.
Again Hornak does it very well:
Slice Selection Gradient
Gz = Gs Sin 60o
Gy = -Gs Cos 60o
Phase Encoding Gradient
Gz = G Sin 30o
Gy = G Cos 30o
Frequency Encoding Gradient Gx = Gf
9. Ch 11, Image Artifacts
9.1. Bo inhomogeneity. We’ve already seen that it reduces the signal for GE sequences. Detailed
analysis of that effect and the geometrical effect (and the Jacobian effect), which are present for
both GE and SE, makes up the last seven weeks (half the semester) of the class.
9.2. RF inhomogeneity. See for example the paper by Likar Viergever Pernus (2001). See Figure 7 in
that paper.
9.3. Motion
9.3.1. General (See Hornak’s graphics under Motion)
9.3.2. Cyclic: Gating can help (See Hornak’s graphics under Motion)
9.3.3. Flow: e.g. “Black blood” (See Hornak’s graphics under Flow)
22
9.4.
Chemical Shift. The protons in fat are subject to a different effective Bo from those in water. Thus,
their images “act” as if they are in the presence of an inhomogeneity B x, y, z cB0 , where c
is approximately 3.5 x 10-6. The result is a geometric shift of the fat signal relative to its true
location by x cB0 Gx , assuming that the readout direction is x (for non-EPI imaging). Here is
the derivation that demonstrates it
s Gy , t f
fat
A x, y, za e
i 2 xGxt f yG y p cB0t f
A x, y, za e
i 2
A x, y, za e
i 2 x1 x Gxt f yG y pt f
xcB0
dxdy
Gx Gxt f yG y pt f
dxdy
dxdy
A x x1 , y, za e
i 2 x1Gxt f yG y pt f
A x x1 , y, za e
i 2 x1Gxt f yG y pt f
A x x1 , y, za e
i 2 x1Gxt f yG y pt f
dx1dy
dx1dy
dx1dy
where x1 x cB0 Gx and x x1 cB0 Gx . Now, if we take an FT of the signal, we get
i x1 , y, za fat C x, y, za
C x1 cB0 / Gx , y, za
Note that the “shift” is forward for c>0. We’ll do a similar, but somewhat more complicated,
derivation when we study static-field inhomogeneity.
9.5.
9.6.
Partial Volume. An effect from large slice thickness (See Hornak’s graphic under Partial Volume)
that can cause blurry images and/or a superposition of anatomical features (that should be in two
different slices).
Gibbs Ringing. The result of the finite time of signal acquisition. Show Hornak’s graphic under
this section. Since the acquisition is finite, the Fourier transform of the image is truncated. By FT
theory, this means that the image is convolved with a sinc function. Looking back at Eq. (11),
s Gy , t f A x, y, za e
i 2 xGxt f yG y p
s k x , k y A x, y, za e
i 2 xk x yk y
23
dxdy,
dxdy,
we see that, in fact, s k x , k y
is truncated in both the k
x
and ky directions. Draw pictures, a 2D
example and a 1D example.
10. Ch 12, Advanced Imaging Techniques
10.1. Volume imaging (3D Imaging)
10.1.1. So far, we’ve seen slice-selection imaging, in which one slice is activated, signals
are acquired from that slice and a 2D FT produces an image of that slice. By
interleaving, it is possible to handle several slices at a time to produce a volume
image, but only one slice is active at a time. Volume imaging makes it possible to
produce a volume image by activating an entire volume. Phase encoding is
performed in two directions (y and z) instead of just one with frequency encoding
being performed also, as in slice-selection imaging. The entire volume contributes
to each signal and the acquired signals are subjected to a 3D FT to produce the
volume image.
We can simply add now the z phase to the version of the expression for the signal
given for the slice-selected image in Eq. (11)
s Gz , , Gy , t f A x, y, z e
s k x , k y , k z A x, y, z e
i 2 xGxt f yG y py zGz pz
i 2 xk x yk y zk z
dxdydz ,
dxdydz ,
k x Gxt f m Gx t
k y Gy py n Gy py
k z Gz pz n G y pz
10.2. Fractional Nex & Echo Imaging
Before starting this explanation show k-space and put in dots showing the points that need
to be sampled before doing the inverse Fourier transform. Show which dots go with which
time points for a standard GE sequence.
We note that there is redundancy in the information that we acquire when we sample the
signal over the entire readout interval. We get two numbers (real and imaginary) at every
sampled time, which means that for SE or GE and for slice-selection or volume imaging,
we have twice as many signal samples as we do image voxels. Mathematically, this can be
stated in terms of the Fourier transform property that if is real, then
s k x , k y s k x , k y
*
s k x , k y , k z s k x , k y , k z
*
24
Thus, we can acquire half the samples and then calculate the other half. For example, in the
slice-selection case, we can, for example, collect only signals for which k y is positive.
Then, we can calculate the other values: s k x , k y s k x , k y , which in k-space means
*
that for each value below the horizontal axis we use the value of a point on the other side
of the origin the same distance from the origin and take its complex conjugate. This
technique is sometimes called, “Half-Fourier Reconstruction”. Hornak calls it “Fractional
Nex Imaging”. (Nex means “number of excitations”).
Alternatively, we can stop sampling at TE, to shorten readout time. Hornak calls this
technique, “Fractional Echo Imaging”.
The advantage is shorter imaging times. A drawback is that there is less signal, so signalto-noise is lower (by square-root of 2). Sometimes a few of the lines just below the axis or
beyond TE are acquired and averaged in to get the low frequencies in the y, or x,
directions, respectively. The result is that the SNR for lower (i.e., closer to zero)
frequencies is higher, which is pleasing to the eye because more recognizable image
content tends to reside in the lower frequencies.
10.3. Fast Spin-Echo Imaging
After readout is completed, the spins are dephased and they are dephasing further, even
after the readout gradient is turned off because of static-field inhomogeneity. Also, T2
dephasing is taking place. The former effect can be undone by another 180-degree pulse.
Look at Hornak’s graphic under in Ch 12, Advanced Imaging Techniques, Fast Spin-Echo
Imaging. HOWEVER, note that he has an incorrect sequence because he has a defocusing
pulse before each readout pulse. In fact only one such pulse is needed (i.e, the one under
the read phase encoding gradient is correct, but the rest of them should not be there).
10.4. Echo-Planar Imaging (Functional MRI)
EPI is also called “Single-shot imaging”. Look at Hornak’s graphic in Ch 12, Advanced
Imaging Techniques, Echo Planar Imaging (Functional MRI). Draw k-space on the board
to the side of the screen, and trace it out while following the EPI pulse sequence. Discuss
other ways to traverse the space: forward-backward, forward only, zig-zag, and spiral.
10.5. Variable-Bandwidth Imaging
[This is a far simpler approach than that given in the (excellent) reference by Haacke,
Brown, Thompson, and Venkatesan, Magnetic Resonance Imaging, Physical Principles
and Sequence Design, Wiley-Liss, NY (1999).]
Start with this argument in 1-D. The signal comes from the spins, whose number is
proportional to x (ignoring the small changes in spin density), but the noise, which is
unrelated to x , comes from everything in the room. As usual, we assume that the noise is
uncorrelated, so its expectation value increases with the square root of the acquisition time.
As usual, the signal is proportional to the acquisition time. Therefore,
25
Signal
xN ex f ;
Noise
N ex f ;
Signal
x N ex f .
Noise
where we recall that f is the total sampling interval—the time over which the signal is
read out.
In 3D:
Signal
xyzN ex f N y N z ;
Noise
N ex f N y N z ;
Signal
xyz N ex N y N z f .
Noise
Note that we have used N x , N y here, instead of M , N , which were the symbols we used
above. The value of N z is one for slice-selection sequences.
Bandwidth. A commonly used term in dealing with SNR is the bandwidth. While the
readout gradient is on, the Larmour frequencies vary across the field of view in the x
direction. The difference between the highest frequency f max Gx X 2 and lowest
frequency f min Gx X 2 , which equals
BWread , or simply the “bandwidth”.
Gx X called the “readout bandwidth”,
Recalling previous the relation, X Gx t , we see that BWread 1 t , which
equals the sampling frequency. This relationship could have been derived from the Nyquist
theorem, which states that to capture frequencies (positive or negative) of magnitude up to
and including f max , the sampling interval can be no greater than 1 2 f max .
1
Another commonly used term is the “Bandwidth per voxel” or “Bandwidth per pixel”,
BW voxel BWread M . Using the relationships above we find that
BW/voxel Gx x 1 f
Therefore, we have that
SNR
xyz Nex
BWread
26
MNN z
where SNR means Signal-to-Noise Ratio. Thus, if the y-z quantities are fixed, then
SNR x N ex
BW voxel
N ex x G x
x N ex f
Thus, it can be seen that the more spin packets ( x ) that contribute to the signal, and the
longer the time of collection of signal from those packets ( N ex f ), the greater the SNR.
On the other hand, increasing the bandwidth decreases SNR and increasing Gx decreases
SNR.
We remember from earlier that
x B Gx
is the erroneous shift in position in the x direction due to an error in the static field. Thus,
we must sacrifice either geometric fidelity or SNR if we adjust Gx. To get both, we must
do something else.
27