EXPERIMENT A1 - Mechanical Engineering : University of Rochester
advertisement

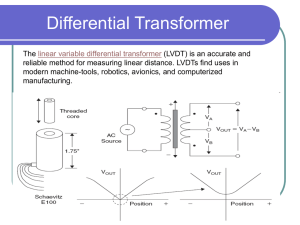
EXPERIMENT A5 Precision Measurements of Displacements Summary: In this experiment you will be using two similar types of instruments which are commonly employed to measure precision displacements. These are LVDT: Linear Variable Differential Transformer RVDT: Rotary Variable Differential Transformer The background and experimental sections will familiarize you with some of the most important features of these instruments. In the laboratory, you will first use an LVDT and perform a simple calibration procedure for this device. Next you will calibrate an RVDT and then employ it in a torque experiment. The RVDT has been mounted on an experimental jig that is designed to measure strain, shaft rotation, and torque in a steel rod. The lab will also incorporate LabVIEW and Excel software packages. Please pay particular attention to the accuracy and precision of the LVDT and RVDT. You will be examining their fundamental linearity and operational ranges. Basic Pre-Lab Instructions: Your key to success in this lab is to come prepared! Before arriving at the lab, read through this lab module so that you will understand what the lab procedure is and how the lab equipment is used. Each group should answer all the questions on the preliminary question sheet to be turned in at the beginning of the lab. Each group will write one report. Timing: This lab will take approximately 3 hours to complete. A teaching assistant or lab technician will assist you with this lab. The lab will be held in Gavett 114. To sign-up for this lab please go to the bulletin board opposite Scott Russell’s office (Hopeman 120) and sign up for one of the lab sessions. A5-1 Background: What is an LVDT? The linear variable differential transformer (LVDT) is a type of electrical transformer used for measuring linear displacement. The transformer has three solenoid coils placed end-to-end around a tube. The centre coil is the primary, and the two outer coils are the secondaries. A cylindrical ferromagnetic core, attached to the object whose position is to be measured, slides along the axis of the tube. An alternating current is driven through the primary, causing a voltage to be induced in each secondary proportional to its mutual inductance with the primary. The frequency is usually in the range 1 to 10 kHz. As the core moves, these mutual inductances change, causing the voltages induced in the secondaries to change. The coils are connected in reverse series, so that the output voltage is the difference (hence "differential") between the two secondary voltages. When the core is in its central position, equidistant between the two secondaries, equal but opposite voltages are induced in these two coils, so the output voltage is zero. When the core is displaced in one direction, the voltage in one coil increases as the other decreases, causing the output voltage to increase from zero to a maximum. This voltage is in phase with the primary voltage. When the core moves in the other direction, the output voltage also increases from zero to a maximum, but its phase is opposite to that of the primary. The magnitude of the output voltage is proportional to the distance moved by the core (up to its limit of travel), which is why the device is described as "linear". The phase of the voltage indicates the direction of the displacement. Because the sliding core does not touch the inside of the tube, it can move with little friction, making the LVDT a highly reliable device. The relative absence of any sliding or rotating contacts can also allow the LVDT to be sealed against a given operating environment. LVDTs are commonly used for position feedback in servo-mechanisms, and for automated measurement in machine tools, control systems, robots, and many other industrial and mechanical systems. Cutaway view of an LVDT. Current is driven through the primary coil at A, causing an induction current to be generated through the secondary coils at B. A5-2 The LVDT or Linear Variable Differential Transformer is a fundamental tool in the Department of Mechanical Engineering’s laboratories. In all of the department’s LVDTs the basic thing to remember is that all are designed to generate an output signal which is proportional to the position of a moveable core with respect to the transformer windings. Typical applications for this device include very precise measurement of displacements as in the tensile test lab that is part of your ME242 lab experience. In the tensile test an LVDT is used to measure the displacement of the tensile specimen throughout its elastic region. These displacements are small and approximately 0.005 to 0.010 inch. In our Mechanical Engineering graduate laboratories LVDTs have been utilized in experiments to detect solid phase transformations in materials by sensing the associated volume change that occurs in the material upon transformation. Automobile manufacturers are now using LVDTs for their ability to very rapidly yield precise positional data. LVDTs are attached to automobile accelerator pedals with the electronic output fed to the vehicle’s fuel/air mixture computer. This signal is used to help compute the appropriate fuel/air mixtures for efficiency, economy, and nonpolluting requirements for modern engines. Fig 1: LVDT attached to tensile test specimen in ME Lab Experiment A1 LVDT Tensile Test Machine Specimen Grips Test Specimen Connector Bracket for LVDT Grips A5-3 What is an RVDT? The Rotational Variable Differential Transformer (RVDT) is used to measure rotational angles and operates under the same principles as the LVDT sensor. However, the LVDT uses a cylindrical iron core whereas the RVDT uses a rotary ferromagnetic core. The RVDT is a useful tool and features relative low cost. The device is quite robust and is capable of working in a wide variety of environments. Like the LVDT, the RVDT has low friction resistance and as the iron core does not contact the transformer coils they typically have a very long service life. A key to the RVDT is that it has a high signal to noise ratio and low output impedance with negligible hysteresis. As might be expected with a rotational sensor the RVDT’s angle resolution is limited by the resolution of the amplifiers and voltage meters used to process the output signal. The September, 2005 edition of Machine Design Magazine reports that custom hybrid ball bearings from a company called Pacamor Kubar Bearings go into rocket-engine controls and are able to withstand both cryogenic temperatures and the vacuum of space. The bearings are special in that they support a shaft in RVDT gear-heads. The RVDT supplies position feedback to an actuator that adjusts a throttle-control valve for an upper-stage rocket engine. The rocket booster, when completed, will be used to deploy satellites. The RVDT unit operates at –425°F which is too cold for standard lubricants. The RVDT must also tolerate repeated oscillating motions. PKB engineers spec'd bearings with a special PTFE-based retainer. This low-friction material has good chemical resistance, handles low and high temperatures, and provides limited lubrication. The use of dry-film lubricants and ceramic bearing balls further help the RVDT-based bearings survive in the harsh environment. A5-4 Apparatus: In this experiment we will be using an LVDT, RVDT, transducer system, various fixtures, and LabVIEW data recorder. These are seen in the figure below. LVDT and RVDT transducer system LabVIEW data acquisition signal conditioner device RVDT fixture LabVIEW system LVDT fixture Fig 2: Lab Apparatus LVDT Experimental Procedures: In this experiment we will first calibrate and develop a calibration curve for the LVDT. For this part we will use the LVDT fixture with micrometer, LVDT, transducer, and LabVIEW data collection system. As stated in the prior reading LVDTs are only linear over a certain range of core motions. Step 1: With the electronics connected run the LabVIEW program “LVDT & RVDT.vi.” A graph of voltage response will appear on the computer screen as well as a digital readout of the LVDT’s voltage. Step 2: Depress the pin on the LVDT and watch the change in voltage. Step 3: Depress the pin and watch the voltage change when the core is outside, inside, and then outside again. Question 1: What is the signal value when the core is outside the case? Answer: Question 2: What causes it? Answer: A5-5 Step 4: Prepare the LVDT for calibration by mounting it in the test fixture. See the figure below for placement. LVDT core LVDT micrometer LVDT fixture Fig 3: LVDT Fixture Step 5: Starting at the micrometer’s 1-inch line, turn the micrometer dial until the voltage reading on LabVIEW has decreased 0.5 volts. Step 6: Using the attachment at the back of this lab record the voltage and the micrometer dial reading. Step 7: Continue the process until the micrometer gage reaches the zero position. Question 3: Make a plot of output signal vs. displacement. Attach it to your report. Question 4: Based on your measurements what is the resolution of the LVDT? Answer: Question 5: Be sure to address what factor limits the resolution of the system in your discussion. What is the resolution of the micrometer? Answer: Question 6: Which is more reproducible, the LVDT or the micrometer? Why? Answer: A5-6 Question 7: Which would you expect to be more reproducible? Answer: Note: LVDTs are usually used to measure displacement. Often, other variables can be made to produce core displacements proportional to their values such as floating the core in a liquid level detector or attaching the core to a spring in a force transducer. The LVDT core can be slung from a very compliant spring so that the core acts as a seismic mass producing an output that is proportional to acceleration. RVDT Experimental Procedure: In this experiment we will next calibrate the RVDT. To do this we will utilize the dial wheel and micrometer jig as seen in the figure below. micrometer Fixture with dial RVDT Fig 4: RVDT Fixture Step 1: Connect the RVDT cable to the transducer system. Step 2: Run LabVIEW. Note the voltage signal and level. Step 3: Rotate the wheel on the RVDT calibrator and observe the signal. Note the presence of a maximum and a minimum. Question 8: Do you think we might be able to approximate this signal as a sine wave? Answer: A5-7 Step 4: Next we will see if a linear approximation can be used to calibrate the RVDT. Adjust the micrometer on the RVDT calibrator so that it reads exactly 6.000. Step 5: Rotate the dial so that it reads zero. Step 6: The rotation angle can now be controlled by manipulating the micrometer as shown in the attached “1641 Precision Rotator” calibration table. Step 7: Make a plot of voltage signal vs. dial angle. Question 9: Is there an approximately linear region? If so, find the constants m and b in the equation: angle = m(signal) + b Answer: Question 10: Add a plot of equation the equation angle = m(signal) + b to the graph developed in Step 7, above. Answer: Question 11: Is the presence of a linear region consistent with the suggestion that the RVDT signal may be varying sinusoidally? Answer: Question 12: Discuss what you might do if you needed to operate over a range where the signal did not vary linearly with angle. Answer: Torque Experiment: The RVDT can be used to measure torque in a metal rod given a known torsional stiffness. In the laboratory we also have a torque apparatus with an RVDT that has already been calibrated and mounted for you. Obtain the table for conversion of signal to angle from your TA. This can be used to calculate the torque in a metal rod with known torsional stiffness. The schematic below details a classic linear plot of torque vs. angle of rotation in a metal rod. A5-8 = (JG) / L T Φ G = Shear Modulus = Modulus of Rigidity G = 80 x 109 Pa or 12 x 106 psi J = Polar Moment of Inertia of the cross section or J = π r4 / 2 L = Length T = Torque Φ= Angle of rotation or Φ = TL/JG Step 1: Set the strain gage indicator’s gage factor to 2.0. Step 2: Check the balance on the strain gage indicator. It should read zero. Step 3: Pull the handle on the torque bar and read and record the following: units of microstrain from the indicator, the units of voltage from the RVDT, and the torque values from the indicator attached to the handle. Note: When recording your data perform a series of increasing and then decreasing torque values. Note: Team work will help you here. Step 4: Plot your data as a torque vs. angle curve and also as a shear stress vs. shear strain curve. A5-9 Question 13: From the plotted data, how can you tell if you are in the plastic deformation region? Answer: Question 14: Determine the modulus of rigidity for the torque bar. Assume the bar is a low carbon austenitic “soft” stainless steel. Answer: G= Question 15: Discuss your calculated value as compared to the handbook value given above. Answer: Step 5: Draw a Mohr’s Circle for the torque rod case and for the tension case and look up the strength of this stainless steel. Assume this rod is 410 stainless steel. Step 6: Use the value developed in Step 5 to determine whether the maximum torque you applied exceeded the yield strength of the rod. Question 16: Is the value found in Step 6 consistent with your answer to Question 13. Discuss. Answer: Question 17: As a check, does a magnet stick to the stainless steel bar? Is this result consistent with our assumption that it is 410 stainless steel? Answer: A5-10 A5 0.5 mm 1.0 % full scale infinite 0.5% full scale A5-11 A5-12 LVDT Calibration Table Step 1 Position 0.000 A5-13 Voltage