THE ALGEBRA OF SOLIDS
advertisement

THE ALGEBRA OF OPEN BODIES
Let R be the set of real numbers.
Rn is n-dimensional space.
A cut through Rn is a tripartition of Rn <c,EXT(c),INT(c)> such that
for any a EXT(c) and for any b INT(c), the continuous line segment from a to b
intersects c.
A bound in Rn is a set b Rn such that <b,EXT(b),INT(b)> is a minimal cut through
Rn, a cut b through Rn such that no proper subset of b is a cut through Rn.
We choose two objects and + not in Rn and introduce two improper bounds in
Rn: = {} and + = {+}, and we set:
EXT(+) = Ø INT(+) = Rn
EXT() = Rn INT() = Ø
We define for bounds b, c in Rn:
b is concentric in c iff INT(b) INT(c).
It follows that if b is concentric in c then EXT(c) EXT(b), and it follows that every
bound is concentric in +, and is concentric in every bound.
Let X Rn and b a bound in Rn
b is an outer bound for X iff
1. for any bound c in Rn: if b is properly concentric in c then:
INT(c) EXT(b) RnX Ø
2. for any bound c in Rn: if c is properly concentric in b then:
INT(b) EXT(c) X Ø
The intuition is: directly inside an outer bound you find X-elements, and directly
outside an outer bound you find non-X elements.
b is a closed outer bound for X iff b is an outer bound for X and b X.
b is an open outer bound for X iff b is an outer bound for X and b X = Ø
b is an inner bound for X iff
1. for any bound c in Rn: if b is properly concentric in c then:
INT(c) EXT(b) X Ø
2. for any bound c in Rn: if c is properly concentric in b then:
INT(b) EXT(c) RnX Ø
The intuition is: directly outside an inner bound you find X-elements, and directly
inside an inner bound you find non-X elements.
b is a closed inner bound for X iff b is an inner bound for X and b X.
b is an open inner bound for X iff b is an inner bound for X and b X = Ø
It follows that + is an open outer bound for Rn and is an open inner bound for Rn,
and that is an open outer bound for Ø and + is an open inner bound for Ø.
And, it follows that if b is a proper bound in Rn, then EXT(b) has open outer bound +
and open inner bound b, while INT(b) has open outer bound b and open inner bound
.
Let X Rn.
X is a body iff
for all x Rn: x X iff
either a: for some outer or inner bound b for X: x b
or
b: for every outer bound b for X: x EXT(b)
or
c: for some inner bound b for X, X INT(b) = Ø and x INT(b)
or
d. for some inner bound b for X there is an outer bound c for X that is
concentric in b and for every outer bound c for X that
is concentric in b: x INT(b) EXT(c).
X is a regular body iff X is a body and:
1. Every outer bound for X is either open or closed, and the same for every
inner bound.
2. All outer bounds for X and all inner bounds for X are disjoint.
So in a regular body, you don't allow bounds that are half inside, half outside, and no
two bounds touch.
X is a regular closed body iff X is a regular body and:
All outer bounds and inner bounds for X are closed.
X is a regular open body iff X is a regular body and:
All outer bounds and inner bounds for X are open.
Following Tarski 1927, we call regular open bodies solids.
A solid is finite iff it has a finite number of outer and inner bounds.
Sn is the set of all solids in Rn.
Fn is the set of all finite solids in Rn.
Intuitively, a solid s divides Rn into maximal subregions where you can connect any
two points by a continuous scribble without crossing any outer or inner bounds. For
each of these maximal subregions of s you can choose a representing point inside that
region. Since the rational numbers lie dense in the real numbers, you can choose the
representing point to be an n-tuple of rational numbers. This means that you can
make a one-one mapping between a solid and a subset of Qn, where Q is the set of
rational numbers. And this means that you can make a one-one mapping between the
set of all solids and pow(Qn). Since Qn is countable this means:
|Sn| = 20א
For finite solids, this means that you can make a one-one mapping between Fn and the
set of all finite subsets of Qn. Since the set of all finite subsets of a countable set is
countable, this means:
|Fn| = א0
Some examples:
-Rn is a solid, and so is Ø.
-If b is a proper bound, INT(b) is a solid, we can call it a sphere.
-Any number of non-overlapping, non-touching n-place spheres is a solid.
-If we take out from Rn any number of non-overlapping non-touching spheres, plus
their outer bounds, the result is a solid.
-Take out from Rn a sphere, take a concentric subsphere of what you have taken out
and put it back in, so that it doesn't touch, the result is a solid.
Etc.
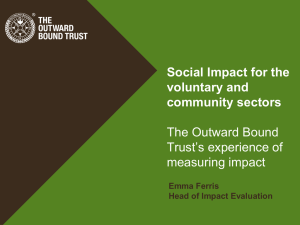
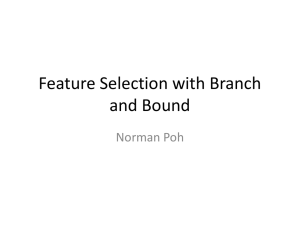
So, two two-dimensional examples in pictures:
The outer cirle indicates +. Black indicates not in, white indicates in:
Its complement is:
Importantly, the following are not solids:
Let r Rn and look at Rn{r}. {r} is not a bound in Rn such that EXT(r)=Rn{r},
because then INT(r) = Ø, which is not a partition. This means that {r} does not count
as an inner bound for Rn{r}.
We check:
-r Rn{r}.
a. r is not part of any inner or outer bound for Rn{r}.
b. The outer bound for Rn{r} is +, and r is not in EXT(+).
c. is an inner bound for Rn{r}, but r INT().
d. does not have outer bounds for Rn{r} concentric in it.
Consequently Rn{r} is not a solid.
This is important, because if it were, the structure would not be distributive, since
both Rn and Rn{r} would have the same complement.
So you cannot eliminate isolated points,. Similarly, you cannot eliminate a set of
points which doesn't form a boundary, like a line segment. The argument runs along
similar lines.
Also not possible is the following:
Let b be a proper bound in Rn and take Rnb.
In that case EXT(b), INT(b) Rn.
In this case b is neither an outer bound nor an inner bound for Rnb.
b is not an outer bound, since it it not true that for any bound c in Rn: if b is properly
concentric in c then INT(c) EXT(b) RnX Ø. This is obvious, since EXT(b)
Rnb.
Sinilarly, b is not an inner bound, since it is not true that for any bound c in Rn: if c is
properly concentric in b then: INT(b) EXT(c) RnX Ø. Again this is obvious,
since INT(b) Rnb.
If b is neither an outer bound not an inner bound, then the argument is as before, you
cannot eliminate b because the points in b are neither in some outer or inner bound for
Rnb, nor in the exterior of every outer band, nor in the interior, disjoint with Rnb of
some inner bound, nor are they in the interior of some inner bound, but outside every
outer bound concentric in that. Consequently, Rnb is not an open body.
The domain of n-dimensional solids is important, since it is the domain on which ndimensional Euclidian Geometry is defined. For three dimension Euclidian
Geometry, we only need to add a relation of 'points x and y equidistant to point z' to
derive the appropriate geometry of three dimensional bodies.
Algebraically, we have the following.
Bn is the set of n-place solids, Fn the set of finite n-place solids.
For set X Rn let BX be the set of outer and inner bounds for X.
We define Bn = <Bn, v, , u, t, 0, 1> and Fn = <Fn, v, , u, t, 0, 1>
where:
1. a v b iff a b
2. b = (Rnb)BRnb
(Rnb is a closed regular body. Taking away the bounds makes the result an open
regular body again.)
3. a u b = a b
uX = X
(The intersection of open regular bodies is an open regular body.)
4. a t b = (a b) {r Rn: for some x,y Ba b: x y and r x y}
(The union of two open regular bodies is not necessarily an open regular body,
because the bounds are not necessarily disjoint: adding the points where two bounds
overlap to a b merges two touching parts into one part with a new open outer
boundary around both. If you do this for any parts whose bounds touch, the final
result will be a regular open body.)
tX = X {r Rn: for some x,y BX: x y and r x y}
5. 0 = Ø
6. 1 = Rn
Theorem: For every n:
Fn and Bn atomless Boolean algebras.
Fn is the countable atomless Boolean algebra.
Fn is not complete, but Bn is, in fact:
Bn is the completion of the countable atomless Boolean algebra.
(the intersection of the complete Boolean algebras of which Fn is a subBoolean
algebra, i.e. the smallest complete Boolean algebra extending Fn.)
Fn and Bn are homogeneous,
(where Boolean algebra B is homogeneous iff for every b B: {a B: a v b} is
isomorphic to B).
Summary of important Boolean algebras:
The finite Boolean algebras are:
for each n: the powerset Boolean algebra with 2n elements.
The countable Boolean algebras are:
-The countable atomless Boolean algebra F.
-for each n, the product of F with the finite Boolean algebra with 2n elements,
this gives, for each n, a countable Boolean algebra with n atoms.
The two most important Boolean algebras of cardinality 2o אare:
-The powerset Boolean algebra with א0 atoms.
-B, the complete atomless Boolean algebra which is the completion of F.
Consequently, also important is:
-The powerset Boolean algebra with 2o אatoms: the smallesty free Boolean
algebra of which all the latter are subBoolean algebras.
Note that B is not the only complete atomless Boolean algebra of cardinality 2oא. But
it is the only complete homogeneous one in which F lies, so to say, extended. It has
in essence the same relation to F as R itself has to Q.