Space/Time mapping setup
advertisement

Space/Time mapping setup
1. The Random Field Model
1.1 Definition
A space/time random field (S/TRF) is a collection of possible realizations for the distribution of the
field at space/time points p
X(p)={p,}
The S/TRF can be viewed as a collection of correlated random variables
xmap=(x1,…,x)
at the space/time points
pmap=(p1,…, p).
A realization of the S/TRF at these points is denoted by the vector
map=(1,…,).
1
Then, an alternative definition of the S/TRF, X(p), is given in terms of all possible realizations. This
definition is illustrated by means of the 1 st, 2 nd and K th realizations of the S/TRF in the figure:
X( p)
Realization
(1)
m
ap
T i me t
Space s
Realization
(1)
(1)
(1)
[ x m ap m
ap ] f( m ap; p m ap) d m ap
Prob
(2)
m
ap
T i me t
(2)
( 2)
(2)
[ x m ap m
ap ] f( m ap; p m ap) d m ap
Prob
Space s
Realization
( K)
m
ap
T i me t
( K)
( K)
( K)
Prob [ x m ap m
ap ] f( m ap; p m ap) d m ap
Space s
2
1.2 The multivariate pdf
A complete stochastic characterization of S/TRF is provided by the multivariate probability density
function (pdf) f defined such that
Prob[1<x1<1+d1 ,…, <x<+d]= f(map;pmap)d1…d
We can write this in a more compact way as
Prob[map <xmap<map +dmap = f(map;pmap)dmap
There is a hierarchy of pdf, in which the lower the level of the hierarchy, the higher the knowledge
provided by the associated S/TRF characterization:
f(; p)
f(1,2 ; p1,p2)
…
f(1,2,…,; p1 , p2 ,…, p)
3
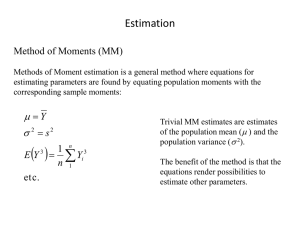
1.3 Statistical moments
A usually incomplete, yet in many practical TGIS applications, satisfactory characterization of the
S/TRF is provided by a limited set of statistical space/time moments defined as
g ( x map ) g (p map ) dχ map g (χ map ) f (χ map ; p map )
where g(.) is some known function. Notice the difference between g(map), which is a function of the
realization values, and its expectation g (p map ) , which is a function of the space/time points.
First order statistical moments: The mean value
If we choose g(map)=i, the corresponding expectation is the mean value mi, for point pi, i.e.
g ( x map ) xi =mi
Second order statistical moments: The covariance
If we choose g(map)=(i- mi) )(j- mj), the corresponding expectation is the covariance cij between
points pi and pj, i.e. g ( xmap ) ( xi mi )( x j m j ) = cij
Other moments of higher order include 3 points statistics, fourth order moments, etc.
4
2. Mapping of Homogeneous/Stationary S/TRF
2.1 The mapping situation
X(p)=X(s,t) is a S/TRF
Data (measurements) of X(p) is available at the data points pdata = (p1,…, pn).
At this points X(p) is viewed as a vector of random variables xdata = (x1,…,xn) = ( X(p1),…, X(pn) )
We denote the estimation point as pk
At the estimation point, the random field is represented by the random variable xk = X(pk)
The mapping problem :
On the basis of some general knowledge G (i.e covariance function, etc.) and site-specific
knowledge S (the data), get some estimate ̂ k for xk.
Related question: What is a good estimator ̂ k for the value of xk at pk ?
5
t
o
Data p oints
Estim ation p oints
o
o
o
o
o
o
o
o
s2
0
s1
o
o
o
o
Mapping situation showing available data points and a set of estimation points
6
2.2 The Mapping points
The mapping points include the data points pdata = (p1,…, pn) AND the estimation point pk, hence
pmap = ( pdata , pk )
xmap = ( xdata , xk )
map = (data , k )
space/time location of the mapping points
vector of random variables representing X(p) at pmap.
a deterministic realization (i.e. a set of possible values) for xmap
The data points pdata = (p1,…, pn) are further divided among hard data points phard = (p1,…, pmh), and
soft data points psoft = (pmh+1,…, pn). Hence we finally have
pmap = (phard , psoft , pk )
xmap = (xhard , xsoft , xk )
map = (hard , soft , k )
7
2.3 The estimation process
Prior stage:
Using general knowledge G, obtain the prior pdf of xmap= (xdata , xk) i.e.
fG(map) = fG(data,k)
Meta prior
Organize the site-specific knowledge S into hard data, soft data, etc., i.e.
data( hard, soft)
Hence the prior pdf becomes
fG(map) = fG(hard, soft, k)
Integration or posterior stage
Update the prior pdf fG by integrating the site-specific knowledge S to obtain the posterior pdf
at the estimation point
Integrate S
f (hard, soft, )
f
( k)
G
K=GUS
prior pdf
posterior pdf providing a complete stochastic
description of xk = X(p) at the estimation point
The interpretive stage:
From the posterior pdf fK( k), extract some estimated value ̂ k for xk= X(pk)
8
Practical notes for using the estimation process in space/time mapping:
Typically space/time mapping is the exercise of selecting an adequate grid of estimation point and an
adequate estimator to construct maps of the estimated values
Example of estimator: The mode of the posterior pdf
Example of mapping grid: Regular 30x40 grid + all estimation points + delaunay triangulation of
estimation points.
9