hence denote
advertisement

Space/Time Mapping – Part 2
Bayesian Epistemic Processing of Site Specific Knowledge
1. The mapping situation
X(p)=X(s,t) is a S/TRF
Data (measurements) of X(p) is available at the data points pdata = (p1,…, pn).
At this points X(p) is viewed as a vector of random variables Xdata = (X1,…,Xn) = ( X(p1),…, X(pn) )
We denote the estimation point as pk
At the estimation point, the random field is represented by the random variable Xk = X(pk)
The mapping problem :
On the basis of some general knowledge G (i.e covariance function, etc.) and site-specific
knowledge S (the data), get some estimate x̂k for Xk.
5
Related question: What is a good estimator x̂k for the value of Xk at pk ?
t
o
Data points
Estimation points
o
o
o
o
o
o
o
o
s2
0
s1
o
o
o
o
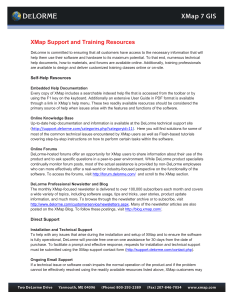
Mapping situation showing available data points and a set of estimation points
6
2. The Mapping points
The mapping points include the data points pdata = (p1,…, pn) AND the estimation point pk, hence
pmap = ( pdata , pk )
Xmap = ( Xdata , Xk )
xmap = ( xdata , xk )
space/time location of the mapping points
vector of random variables representing X(p) at pmap.
a deterministic realization (i.e. a set of possible values) for Xmap
The data points pdata = (p1,…, pn) are further divided among hard data points phard = (p1,…, pmh), and
soft data points psoft = (pmh+1,…, pn). Hence we finally have
pmap = (phard , psoft , pk )
Xmap = (Xhard , Xsoft , Xk )
xmap = (xhard , xsoft , xk )
7
3.
The estimation process
Prior stage:
Using general knowledge G, obtain the prior pdf of Xmap= (Xdata , Xk) i.e.
fG(xmap) = fG(xdata, xk)
Meta prior
Organize the site-specific knowledge S into hard data, soft data, etc., i.e.
xdata( xhard, xsoft)
Hence the prior pdf becomes
fG(xmap) = fG(xhard, xsoft, xk)
Integration or posterior stage
Update the prior pdf fG by integrating the site-specific knowledge S to obtain the posterior pdf
at the estimation point
Integrate S
f (xhard, xsoft, x)
f
(xk)
G
K=GUS
prior pdf
posterior pdf providing a complete stochastic
description of Xk = X(p) at the estimation point
The interpretive stage:
From the posterior pdf fK(xk), extract some estimated value x̂k for Xk= X(pk)
8
Practical notes for using the estimation process in space/time mapping:
Typically space/time mapping is the exercise of selecting an adequate grid of estimation point and an
adequate estimator to construct maps of the estimated values
Example of estimator: The mode of the posterior pdf
Example of mapping grid: Regular 30x40 grid + all estimation points + delaunay triangulation of
estimation points.
9
4.
The site-specific knowledge base
The total knowledge base K about the mapping situation is divided between general knowledge base
G, and site-specific knowledge base S, so that K=G U S.
The general knowledge base G includes all knowledge bases that are of general nature about the
random field X(p) of interest, as described previously.
The site-specific knowledge base S includes all knowledge bases that are specific to the mapping
situation at hand. They refer to the data, measurements, etc. available in the specific mapping region
of interest. Usually the site-specific knowledge bases is composed of the hard and soft data, i.e. S
includes
The hard data xhard= (x1,…, xmh),
The soft data xsoft= (xmh+1,…, xn) which can be of interval type, or probabilistic type
10
Hard data are exact measurements, i.e. at phard we have
S : xhard = (x1,…, xmh), P[Xhard= xhard ] = 1
Example: We are mapping the rainfall X(p) over Chapel Hill. We have 5 rain gages, and on
10/07/02 at 3:30pm it is not raining. Hence the hard data at these five space/time hard data
points is xhard= 0 = (0, 0, 0, 0, 0), and P[Xhard= xhard] = 1
Soft data xsoft= (xmh+1,…, xn)of interval type are intervals I with lower and upper bound of the
measurements a and b, i.e. . hence at psoft we have
S : xsoft I, P[a<Xsoft<b]=1
where a=(amh+1,…, an) is the (deterministic) vector of lower bound value of the measurement
b=(bmh+1,…, bn) is the (deterministic) vector of upper bound value of the measurement
I=(Imh+1,…, In) are the intervals Ii=[ai, bi,], for i=mh+1 to n.
Example: At two soft data points psoft=(p2, p3) we known that the concentration X(p) in the air
of particulate matter is below the detection limit of 5 ppm, hence
a=(0ppm, 0ppm), b=(5ppm, 5ppm), Xsoft=(X2, X3), and P[a<Xsoft<b]=1
11
Soft data xsoft= (xmh+1,…, xn)of probabilistic type is the so-called soft cdf of Xsoft representing the
random field X(p) at the at the soft data points psoft, i.e.
S : xsoft I, P[Xsoft<xsoft]=FS(xsoft)
Example: We have one soft data point psoft=p4 where X(p4)=X4 is a random variable such that
if x4 0
0
P[X4< x4]=FS(x4), where FS(x4)= x4 /20 if 0 x4 1
1
if x4 1
Draw FS(x4) and calculate fS(x4).
12
5.
Bayesian epistemic stage: Processing the site specific knowledge base
At the posterior stage we update the prior pdf fG(xmap) with site-specific knowledge S using a
conditionalization processing rule, which yields the posterior pdf fK(xk) at the estimation point
Site-specific knowledge S
prior pdf
fG(xmap)
Integration
stage
posterior pdf
fK(xk)
Different conditionalization processing rules can be used, including
Bayesian conditionalization
Material bi-conditionalization
In the following we will consider Bayesian conditionalization for hard data, interval soft data, and
probabilistic soft data.
13
Bayesian conditionalization for hard data
Let hard be the hard data such that P[Xhard =xhard] = 1. Then the posterior pdf is given by
fK(xk) =
f G ( x map )
f G ( x hard )
f G ( x hard , xk )
, (conditional probability)
f G ( x hard )
where fG(xhard)= dxk f G ( x map ) = dxk f G ( x hard , xk ) is the marginal pdf of fG with respect to xhard
Example:
Consider one hard datum p1 and one estimation point pk, so we have
Xdata = (X1), and Xmap = (Xdata , Xk) = (X1, Xk).
Assume the prior pdf given by
fG(xmap) = fG(x1, xk) = exp { o+1 x1 +2 xk+3 x12+4 x1 xk+5 xk2 }
Assume that the hard data is x1=10. Then the posterior pdf is given by
fK(xk) =
f G ( x1 , xk ) | x1 10
f G ( x1 ) | x1 10
exp{ 0 110 2 k 310 2 410 xk 5 xk }
2
=
d k exp{0 110 2 xk 310
2
410 xk 5 xk }
2
14
Bayesian conditionalization for soft interval data
Let Xdata=(Xhard, Xsoft) correspond to both hard and soft data so that Xmap=(Xhard, Xsoft, Xk).
At the hard data points, P[Xhard =xhard] = 1
At the soft data points, P[Xsoft Isoft] = 1, where Isoft=[a, b] are the soft intervals
Then the posterior pdf is given by
fK(xk) = A -1 x I dxsoft f G ( x hard , xsoft , xk ) ,
soft
soft
where A= dxk x I dxsoft f G ( xhard , xsoft , xk ) is a normalization constant.
soft soft
Example:
Consider one hard datum p1 , one (soft) interval datum p2, and one estimation point pk. Let the prior
pdf be fG(x1, x2, xk), the hard datum be x1=10, and the soft datum be Isoft,=[1 9], i.e. P[1≤X2≤9]=1.
Then the posterior pdf is given by
9
fK(xk) = A -1 1 dx2 f G (10, x2 , xk )
9
where A= dxk 1 dx2 f G (10, x2 , xk )
15
Bayesian conditionalization for soft probabilistic data
Let’s now consider probabilistic soft data given by P[Xsoft< xsoft]=FS(xsoft), and let’s define the soft
pdf as fS(xsoft)= FS(xsoft)/ xsoft. Then the posterior pdf is given by
fK(xk) = A -1 dxsoft f S ( xsoft ) f G ( xhard , xsoft , xk ) ,
where A= dxk dxsoft f S ( xsoft ) f G ( xhard , xsoft , xk ) is a normalization constant.
Example:
Consider one hard datum p1 , one (soft) interval datum p2, and one estimation point pk. Let the prior
pdf be fG(x1, x2, xk), the hard datum be x1=10, and the soft datum be fS(x2). Then the posterior pdf is
given by
fK(xk) = A -1 dx2 f S ( x2 ) f G (10, x2 , xk )
where A= dxk dx2 f S ( x2 ) f G (10, x2 , xk )
16