Stereo Vision using PatchMatch Algorithm
advertisement

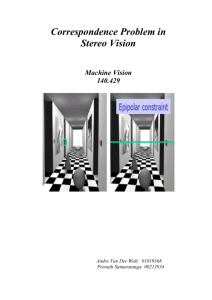
Stereo Vision using PatchMatch Algorithm Junkyung Kim Class of 2014 1. Introduction Vision Problem Revisited • Loss of information – 3-D physical world projected onto a 2-D surface Vision Problem Revisited – Therefore, an inherently Ill-posed problem Vision Problem Revisited • Possible solutions – 1. Directly exploit the Well-behavedness of the physical world • Shading • Occlusion • Textural transformation & alignment … Vision Problem Revisited • Possible solutions – 2. Rely on different sources of information • Ecolocation • “Kinect” … Vision Problem Revisited • Possible solutions – 2. Use multiple 2-D images • Motion • Stereo 1. Description of the problem What is Stereo Vision? • A constrained version of motion parallax – When the observer moves, closer objects appear to move faster – Constraint 1 : only two frames (binocular) – Constraint 2 : observer moves only laterally – Constraint 3 : all the objects are stationary What is Stereo Vision? • Binocular disparity for depth computation What is Stereo Vision? • How to get depth? = How to get delta-X ? – Must find the correspondence pairing first www.consortium.ri.cmu.edu What is Stereo Vision? • How to get depth? = How to get delta-X ? Correspondence Problem • Ambiguity, again – Exhaustive search, even though reduced only within the epipolar line, is highly prone to false pairing – 1. inherent imbalance : search space >> sample space – 2. noise Correspondence Problem • Ambiguity, again – Worst-case scenario : binary RDS Correspondence Problem • Solutions – 1. Use more evidence (neighboring pixels) • Equivalent to increasing sample space • Better-posed than ill-posed – 2. Enforce well-behavedness of the world • smoothness Correspondence Problem • Implementation – 1. Representational • Some feature map rather than raw image – 2. Computational • PatchMatch 3. Method : PatchMatch PatchMatch • A Randomized Correspondence Algorithm for Structural Image Editing • Barnes, et al • Patten Analysis & Recognition, 2009 PatchMatch • Proposed Applications – Image reconstruction (reshuffling) Barnes et al, 2009 PatchMatch • Proposed Applications – Image completion (inpainting) Barnes et al, 2009 PatchMatch • Proposed Applications – Image retargeting (transformations) Barnes et al, 2009 PatchMatch • Why is it suitable for stereo correspondence? – 1. patch-based match • Nearest-Neighbor Field (NNF) • large sample space > uniqueness constraint better satisfied PatchMatch • Why is it suitable for stereo correspondence? – 2. computational efficiency : • randomized search followed by propagation – Not just faster, but easier to implement smoothness enforcement • Important in application (e.g. navigation) 4. Milestones Milestones • Week 1~2 – Study PatchMatch and source code – Gather dataset to work on • Preferrably with one with ground-truth disparity map Milestones • Week 3~5 (mid-project presentation) – Preliminary implementation – Generate first-round of outputs Milestones • Week 6~9 (final presentation) – Evaluate the algorithm with full outputs – (if time allows) Draw comparison among several different implementations